Kinetics of Particles
advertisement

Ch. 8: Kinetics of Particles
415
8.0 Outline
415
Introduction
Newton’s Second Law
Equations of Motion
Rectilinear Motion
Curvilinear Motion
416
417
418
421
444
8.0 Outline
Ch. 8: Kinetics of Particles
416
8.1 Introduction
Kinetics is the study of the relations between the forces
and the motion. Here we will not seriously concern
whether the forces cause the motion or the motion
generates the forces (causality).
In this chapter, the focus is on the particles. That is the
body whose physical dimensions are so small compared
with the radius of curvature of its path.
There are at least 3 approaches toe the solution of
kinetic problems: (a) Newton’s second law (b) work and
energy method (c) impulse and momentum method.
8.1 Introduction
Ch. 8: Kinetics of Particles
417
8.2 Newton’s Second Law
F = ma
m = mass (resistance to rate of change of velocity) of the particle
F = resultant force acting on the particle
a = resulting acceleration measured in a nonaccelerating frame of reference
For most engineering problems on earth, the acceleration
measured w.r.t. reference frame fixed to the earth’s
surface may be treated as absolute. And Newton’s 2nd
law of motion holds.
Newton’s 2nd law breaks when the velocities of the order
of the speed of light are involved theory of relativity
8.2 Newton’s Second Law
Ch. 8: Kinetics of Particles
418
8.3 Equation of Motion and Solution of Problems
∑ F = ma
--- equation of motion
scalar components decomposition according to a specified coordinate
Two problems of dynamics
(1) specified kinematic conditions, find forces
straightforward application of Newton’s law as
algebraic equations
(2) specified forces, find motion
Difficulty depends on the form of force function
(t, s, v, a), as the solutions are found by solving
a system of differential equations.
For simple functions, we can find closed form solutions
of motion as in rectilinear motion (sec. 2.2).
8.3 Equation of Motion and Solution
Ch. 8: Kinetics of Particles
419
Unconstrained motion
Motion of the particle is determined by its initial motion and
the forces from external sources. It is free of constraints
and so has three degrees of freedom to specify
the position. Three scalar equations of motion would
have to be applied and integrated to obtain the motion.
Constrained motion
Motion of the particle is partially or totally determined by
restraining guides, other than its initial motion and the
forces from external sources. Therefore, all forces, both
applied and reactive, that act on the particle must be
accounted for in Newton’s law. The number of d.o.f. and
equations are reduced regarding to the type of constraints.
8.3 Equation of Motion and Solution
Ch. 8: Kinetics of Particles
420
Free body diagram
All forces acting on the particle needed to be accounted
in the equations of motion. Free body diagram unveils
every force that acts on the isolated particle. Only after
the FBD has been completed should the equations of
motion be written. The appropriate coordinate axes and
directions should be indicated and consistently used
throughout the problem.
Treatment of the body as particle is valid when the forces
may be treated as concurrent through the mass center.
8.3 Equation of Motion and Solution
Ch. 8: Kinetics of Particles
421
8.4 Rectilinear Motion
If the x-axis is the direction of the rectilinear motion,
=
∑ Fx ma x=
∑ Fy 0=
∑ Fz 0
If we are not free to choose a coordinate direction along the motion,
the nonzero acceleration component will be shown up in all equations:
=
=
=
∑ Fx ma
∑ Fy ma
∑ Fz ma z
x
y
Other coordinate system such as n-t or r-θ
a may be determined via the use of relative motion
For pure translating moving reference frame
a A = a B + a A/B
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/1
422
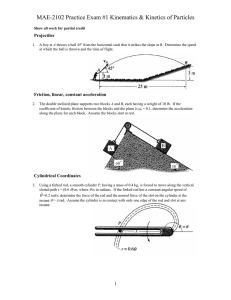
The coefficient of static friction between the flat
bed of the truck and the crate it carries is 0.30.
Determine the minimum stopping distance s that
the truck can have from a speed of 70 km/h with
constant deceleration if the crate is not to
slip forward.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
423
mg
P. 8/1
+x
F < 0.3N
N
If the crate is not to slip, crate and truck must have same acceleration.
If the crate is not to slip, friction = static friction at impending status.
Minimum stopping distance when the deceleration is the max allowable value.
∑ Fx =
ma x
− 0.3mg =
ma x , a x =
−0.3g constant for minimum distance
v 2 = v o2 + 2a ( s − s o )
2
10
0 = 70 × + 2 ( −0.3g ) s, s = 64.2 m
36
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/2
424
If the truck of Prob. 3/17 comes to stop from an initial forward
speed of 70 km/h in a distance of 50 m with uniform deceleration,
determine whether or not the crate strikes the wall at the forward
end of the flat bed. If the crate does strike the wall, calculate its
speed relative to the truck as the impact occurs. Use the friction
coefficients μs = 0.3 and μk = 0.25.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
425
P. 8/2
stopping distance = 50 m, which is less than minimum value 64.2 m
∴ the crate slips
2
10
v =
v + 2a ( s − s o ) 0 =×
−3.781 m/s 2
70
+ 2a truck × 50, a truck =
36
10
v =v o + a ( t − t o ) 0 = 70 × − 3.781× t, t stop =5.14 s
36
2
2
o
Friction force:
=
Fs 0.3mg
= 2.943m and
=
Fk 0.25mg
= 2.45m
+x
Assume crate and truck go together → a truck =
a crate
∑ Fx = ma x − F = m ( −3.781) → required friction = 3.781m > Fs
∴ the crate slips and F =
Fk
− Fk =
ma crate , a crate = −2.45 m/s
[a crate/truck =a crate − a truck ]
F < 0.3N
2
a crate/truck =−2.45 − ( −3.781) =1.331 m/s 2
N
∴ the crate slips forward but will it strike the wall?
1
2
2
s =s o + v o ( t − t o ) + 2 a ( t − t o ) relative motion calculation
1
3=
×1.331× t 2 , t strike= 2.123 s < t stop ∴ crate will strike the wall before the truck stops
2
v =v o + a ( t − t o ) relative motion calculation
v crate/truck =
0 + 1.331× 2.123 =
2.826 m/s
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/3
426
If the coefficients of static and kinetic friction
between the 20-kg block A and the 100-kg cart B
are both essentially the same value of 0.50,
determine the acceleration of each part for
(a) P = 60 N and (b) P = 40 N.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
427
20g
P. 8/3
2P
(a)=
N A 20g,=
Fmax 0.5N
98.1 N < 120 N
=
A
∴ block A moves forward relative to B
∑
Fx ma x 120 − 98.1
a A 1.095 m/s
=
= 20a A , =
=
=
98.1 100a
0.981 m/s 2
B, aB
2
NA
F
F
NA
100g
(b) Fmax > 80 N ∴ block A does not move relative to B
∑ Fx = ma x A & B move together
=
80 120a,
=
a 0.667 m/s 2
Find developed friction by isolated FBD at A or B
80=
− F 20a,=
F 66.67 N < Fmax ∴ assumption is valid
NB
=
F 100a,
=
F 66.67 N
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/4
428
A simple pendulum is pivoted at O and is free to
swing in the vertical plane of the plate. If the
plate is given a constant acceleration a up the
incline θ, write an expression for the steady
angle β assumed by the pendulum after all
initial start-up oscillations have ceased. Neglect
the mass of the slender supporting rod.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/4
429
y
T
β
mg
x
θ
∑ F=
0 Tcosβ − mgcos=
θ 0
y
∑
Fx ma x Tsinβ − mgsin
θ ma
=
=
−1 a + gsinθ
β = tan
gcos
θ
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
430
P. 8/5 For the friction coefficients μs = 0.25 and
μk = 0.20, calculate the acceleration of each
body and the tension T in the cable.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/5
431
T
60g
2T
F
N
s A + 2s B + c = l → a A + 2a B = 0
20g
=
N 60gcos30, F=
127.4 N
µ=
max
sN
Assume motion impends at block A → F =
Fmax and equilibrium
∑=
F 0 60gsin30 − Fmax − =
T 0, =
T 166.9 N
but cylinder B will not be in equilibrium ( 20g − 2T < 0 → move up )
Assum block A slides down and block B moves up
ma 60gsin30 − Fk − T =
60a A =
−120a B
∑ F =
20g − 2T =
20a B , T =
105.35 N, a B =
−0.725 m/s 2 , a A =
1.45 m/s 2
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/6
432
A bar of length l and negligible mass connects the cart of mass
M and the particle of mass m. If the cart is subjected to a constant
acceleration a to the right, what is the resulting steady-state
angle θthat the freely pivoting bar makes with the vertical?
Determine the net force P (not shown) that must be applied to
the cart to cause the specified acceleration.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/6
433
Mg
P
y
θ
T
T
N
x
mg
From the given statements, pendulum and cart have same acceleration
At the pendulum,
∑ Fy = 0
Tcosθ − mg = 0, T = mg/cosθ
=
∑ Fx ma x
a
Tsin
θ ma,
θ tan −1
=
=
g
At the cart,
∑ F=
ma x
x
P − Tsin=
P
θ Ma, =
( m + M ) gtanθ
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/7
434
Determine the accelerations of bodies A and B
and the tension in the cable due to the
application of the 250 N force. Neglect all friction
and the masses of the pulleys.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
435
P. 8/7
70g
35g
2T
NA
sA
300 N
3T
sB
NB
2s A + 3s B + c = l → 2a A + 3a B = 0
∑
Fx ma x −=
2T 70a A and 300 −=
3T 35a B
=
aA =
−2.34 m/s 2 , a B ==
1.56 m/s 2 , T 81.8 N
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/8
436
The sliders A and B are connected by a light
rigid bar and move with negligible friction in the
slots, both of which lie in a horizontal plane.
For the position shown, the velocity of A is
0.4 m/s to the right. Determine the acceleration
of each slider and the force in the bar
at this instant.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
437
NB
P. 8/8
T
NA
T
sB
sA
40 N
Kinematics: triangle OAB
sA =
s B and 0.5 =
s A cos15 + s B cos15, s A =
sB =
0.2588 m
l 2 = s 2A + s 2B − 2s A s B cos150
diff: 0 = 2s A v A + 2s B v B − 2 cos150 ( s A v B + s B v A )
−0.4 m
given: v A =
0.4 m/s → v B =
diff: 0 = v 2A + s A a A + v 2B + s Ba B − cos150 ( s A a B + s Ba A + 2v A v B )
0 =0.04287 + 0.4829a A + 0.4829a B
(1)
Kinetics:
∑ F= ma 40 − Tcos15= 2a A and − Tcos15= 3a B into (1)
−8.04 m/s 2 , T =
aA =
7.95 m/s 2 , a B =
25.0 N
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
P. 8/9
438
With the blocks initially at rest, the force P is
increased slowly from zero to 260 N. Plot the
accelerations of both masses as functions of P.
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
439
35g
P. 8/9
FA
N A =35g, N B = N A + 42g =77g
NA
NA
FA
P
42g
=
=
=
FAmax 0.2N
68.67 N,=
FBmax 0.15N
113.3 N
A
B
FB
=
=
=
FAk 0.15N
51.5 =
N, FBk 0.10N
75.54 N
A
B
NB
Three possible situations: no motion, B & A move together, and B & A move separately.
Two impossible situations: B moves alone then FA will ≠ 0 → A will move eventually
and A moves alone P is applied at block B and force P is increased slowly from zero
( not jump right to F )
A max
1) 0 ≤ P ≤ FBmax : FB will be developed to cancel with the applied P,
FA will stay zero, and so there is no motion →=
a A 0 &=
aB 0
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
440
P. 8/9
2) assume both A and B go together in this phase ∴ FA ≤ FAmax and FB =
FBk
=
FA 35a & P − FA =
− FBk 42a
∑ F ma =
at=
P P=
FBmax ( increased slowly ) =
, a 0.49 m/s 2 and =
FA 17.16 N ( jumping )
min
at FA = FAmax
=
other ) , P
( about to slip relative to each
between these extremum values, a =
∴ FBmax
226.6
=
N and a 1.962 m/s 2
P − FBk
: linear function of P
77
< P ≤ 226.6 : a A =
a B which varies linearly from 0.49 to 1.962 m/s 2
3) A slide ( backward ) relative to B increasing P makes B accelerates more and more
P > 226.6 N makes A slips → FA =
FAk
∑ F ma =
=
FAk 35a A & P − FAk =
− FBk 42a B
P − 127.04
a A 1.47
=
m/s 2 constant and a B
: linear function of P
42
∴ 226.6 < P ≤ 260.0 : a A 1.47 m/s 2 constant and 2.37 < a B ≤ 3.166 m/s 2
=
( jumping )
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
441
P. 8/9
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
442
P. 8/10 The system is released from rest in the position
shown. Calculate the tension T in the cord and
the acceleration a of the 30 kg block. The small
pulley attached to the block has negligible mass
and friction. (Suggestion: First establish the
kinematic relationship between the accelerations
of the two bodies.)
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
443
P. 8/10
+b
Kinematics: b 2 = c 2 + x 2 and b + y = l
diff:
=
bb xx and=
b + y 0
= x 2 + xx
and
b 2 + bb
b +
y= 0
c
(1)
+y
+x
at this instant: =
x/b 4 / 5,=
x 0,=
b 0 ( initially rest )
assume cylinder moves down, hence block moves to the left
T
30g
Kinetics: for 30 kg block
∑ F= ma
T × 3/5 − T − 30g + N= 0, N= 30g + 2T/5
F − T × 4/5 =
30x
assume the block moves → F =
0.25N
for 15 kg cylinder
=
−15b
15g − T =
15y
x
=
b
7.5g − 0.7T
x=
30
recall (1) ,
4
b
= =
5
x
( T/15 − g ) × 30 , T=
7.5g − 0.7T
= −0.766 m/s 2
F
T
N
T
137.9 N
15g
8.4 Rectilinear Motion
Ch. 8: Kinetics of Particles
444
8.5 Curvilinear Motion
Choose appropriate coordinate system (x-y, n-t, or r-θ)
for the given problem. Determine the motion along
those axes. Then set up the Newton’s law
along those axes. The positive sense of the force and
acceleration must be consistent.
=
=
x-y system:
∑ Fx mx
∑ Fy my
( )
m (r − rθ )
∑F =
ρβ 2 m ( v 2 / ρ ) =
n-t system:=
∑ Fn m=
∑ Ft mv
r-θ system:
2
r
m ( rθ + 2rθ )
∑ Fθ =
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/11
445
The member OA rotates about a horizontal axis through O
with a constant counterclockwise velocity ω= 3 rad/s. As it
passes the position θ= 0, a small block of mass m is placed
on it at a radial distance r = 450 mm. If the block is observed
to slip at θ= 50°, determine the coefficient of static friction
μs between the block and the member.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
446
P. 8/11
mg
use n-t coordinate system
given: ρ =0.45 m, β =50°, ρ =0 ( no slip until β =50° ) ,
β 3=
=
rad/s, β 0
∑ Ft =
ma t
t
(
)
m ( ρβ )
+ ρβ , N =
N − mgcos50 =
m ρβ
mgcos50
mgsin50 − F
=
∑ Fn ma n =
n
2
At 50°, F = Fs = µs N and directs upward because gsin50 > ρβ 2
F
N
which means bar OA rotates too slow than required to keep
the block stays on the bar. The friction will develop to resist
the block from sliding down or to match
F with ρβ 2 .
(
∑
)
If the bar rotates very very slow, friction force cannot make
∑ F to match ρβ 2 ∑ F cannot be reduced any more, ∑ F > ρβ 2 .
(
)
And then the block will slide down, hence ρ decreases, to the position
where v 2 / ρ large enough to match
(
∑ F (i.e., to satisfy Newton's law)
)
mgsin50 − µs mgcos50= m ρβ 2 , µs= 0.549
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/12
447
A 2 kg sphere S is being moved in a vertical plane by a robotic
arm. When the arm angle θis 30°, its angular velocity about
a horizontal axis through O is 50 deg/s CW and its angular
acceleration is 200 deg/s2 CCW. In addition, the hydraulic
element is being shortened at the constant rate of 500 mm/s.
Determine the necessary minimum gripping force P if the
coefficient of static friction between the sphere and the gripping
surfaces is 0.5. Compare P to the minimum gripping force Ps
required to hold the sphere in static equilibrium in the 30˚ position.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/12
θ
mg
448
mg
r
2Fr
2Fs
2Fθ
given: m =
1 kg, r =
1 m, r =
0
−0.5 m/s, r =
π
π
30°, θ =
200 ×
3.49 rad/s 2
θ=
−50 ×
=
−0.873 rad/s, θ =
=
180
(
)
m ( rθ + 2rθ ) ,
− mgcosθ =
180
∑ Fr = ma r
− mgsinθ + 2Ffr = m r − rθ 2 , Ffr = 4.143 N
∑ Fθ =
maθ
2Ffθ
Ff =
Ffθ =
12.859 N
Ff2r + Ff2θ = 13.51= µs P → P= 27.02 N
static equilibrium: 2Fs = 2 µs Ps = mg → Ps = 19.62 N
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
449
P. 8/13 A flatbed truck going 100 km/h rounds a
horizontal curve of 300 m radius inwardly banked
at 10°. The coefficient of static friction between
the truck bed and the 200 kg crate it carries is
0.70. Calculate the friction force F acting on
the crate.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
450
y
P. 8/13
mg
n
F
assume the crate tends to slide up the truck bed
N
∴ friction directs downslope
the crate has absolute curve motion into the paper on the horizontal plane
∑ Fn = ma n
m
10
Nsin10 + Fcos10 =
100
×
300
36
2
∑ Fy = 0 − mg + Ncos10 − Fsin10 =
0
N 2021.52
=
N and F 165.9 N
check if this friction can be provided
=
Fmax 0.7N
= 1415 N > F
∴ the crate tends to slide up due to high speed curved motion
but still too far from sliding up (can increase the truck speed
yet the crate does not move relative to the truck bed)
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/14
451
The flatbed truck starts from rest on a road whose constant
radius of curvature is 30 m and whose bank angle is 10°. If
the constant forward acceleration of the truck is 2 m/s2,
determine the time t after the start of motion at which the crate
on the bed begins to slide. The coefficient of static friction
between the crate and truck bed is μs = 0.3, and the truck
motion occurs in a horizontal plane.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
452
P. 8/14
static
motion
y
200g
200g
n
F
N
Fsn
Fst
(inward)
N
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
453
P. 8/14
= 1932.2 N,
=
=
Static case:=
N s 200gcos10
Fs 0.3N
579.66 N
s
=
= 340.7 N upward to prevent sliding down the incline, and < Fs
F 200gsin10
Slipping when friction = Fs but in what direction?
Fs can be divided in two components: along n- and t-axis
Fst points in positive t (inward the paper) to match the positive a t
Fsn points down the incline to match the component of a n down the incline
When the truck moves, N > N s to match the positive component of a n up the truck bed
=
ρ 30 m,
=
ρ 0,=
ρ 0,=
given:
a t 2 m/s 2
[a=t v ]
=
v a=
2t
tt
=
∑ Fy 0
Ncos10 − 200g − Fsn =
sin10 0
∑ Fn =
ma n
4t 2
Fsn cos10 + Nsin10 =
200 ×
30
∑ Ft= ma t
Fst= 200 × 2= 400 N
Fs2n =
+ Fs2t Fs2
=
Fsn
N
+ Fs2t
Fs2n =
( 0.3N )
(1)
( 2)
2
0.09N 2 − 160000 and substitute into (1)
2076.47, 1919.24 N but 1919.24 < N s which is impossible
=
∴ N 2076.47
=
N, Fsn 477.55=
N, Fst 400
=
N, t 5.58 s
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/15
454
The small object is placed on the inner surface of the conical
dish at the radius shown. If the coefficient of static friction
between the object and the conical surface is 0.30, for what
range of angular velocities ωabout the vertical axis will the block
remain on the dish without slipping? Assume that speed changes
are made slowly so that any angular acceleration may be neglected.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
mg
mg
P. 8/15
ωmax
ωmin
Fs
455
Fs
N
N
given:=
ω 0,=
ρ 0.2 =
, ρm 0,=
ρ 0
ωmin causes small a n → Fs upward to reduce ∑ Fn
ωmax causes large a n → Fs downward to increase ∑ Fn
∑ Fy 0
ωmin : =
∑=
Fn ma n
=
− mg 0
Ncos30 + 0.3Nsin30
2
= m ( 0.2ωmin
Nsin30 − 0.3Ncos30
) , ωmin = 3.405 rad/s
∑ Fy 0
ωmax : =
Ncos30 − 0.3Nsin30
=
− mg 0
2
∑=
Fn ma n Nsin30 + 0.3Ncos30
= m ( 0.2ωmax
7.214 rad/s
) , ω=
max
∴ 3.405 < ω < 7.214 rad/s
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/16
456
The 2 kg slider fits loosely in the smooth slot of the disk, which
rotates about a vertical axis through point O. The slider is free
to move slightly along the slot before one of the wires becomes
taut. If the disk starts from rest at time t = 0 and has a constant
clockwise angular acceleration of 0.5 rad/s2, plot the tensions
in wires 1 and 2 and the magnitude N of the force normal to
the slot as functions of time t for the interval 0<=t<=5 s.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
457
P. 8/16
given:=
θ 0.5 rad/s 2 constant →
=
θ 0.5t,=
θ 0.25t 2
0, r= 0
r= 0.1 m & free to move slightly ≈ move with the disk → r=
assume N and T to be in the indicated direction and use r-θ coordinate
∑ Fr ma r
=
(
− Ncos45 − Tcos45 =2 × −0.1× ( 0.5t )
2
∑ Fθ =
maθ Nsin45 − Tsin45 =×
2 ( 0.1× 0.5 ) =
0.1
0.05t 2 + 0.1
0.05t 2 − 0.1
N =
T
2
2
N is always positive ∴ the assumed direction is correct
T will be negative for t < 1.414 s
0, 0 ≤ t ≤ 1.414 s
∴ T1 =
0.05t 2 − 0.1
, t > 1.414 s
2
) =−0.05t
r
2
N
45°
T
θ
θ
0.1 − 0.05t 2
, 0 ≤ t < 1.414 s
and T2 =
2
0, t ≥ 1.414 s
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
458
P. 8/16
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/17
459
A small rocket-propelled vehicle of mass m travels down the
circular path of effective radius r under the action of its weight
and a constant thrust T from its rocket motor. If the vehicle
starts from rest at A, determine its speed v when it reaches B
and the magnitude N of the force exerted by the guide on the
wheels just prior to reaching B. Neglect any friction and any
loss of mass of the rocket.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/17
mg
460
T
n
N
t
∑ Fn= ma n
N − mgsinθ= mv 2 / r
T + mgcosθ
m
θ
Tθ
2
v / 2 ∫ a t ( rdθ=
=
), v 2 2r + gsinθ
[ vdv a t ds] =
m
0
∑ Ft = ma t
T + mgcosθ = ma t , a t =
N 3mgsinθ + 2Tθ
=
πT
vθ =π /2 =
r
+ 2g
m
Nθ =π /2 =
3mg + Tπ
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
461
P. 8/18 A hollow tube rotates about the horizontal axis
through point O with constant angular velocity
ωo . A particle of mass m is introduced with
zero relative velocity at r = 0 when θ= 0 and
slides outward through the smooth tube.
Determine r as a function of θ.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
462
P. 8/18
0
given:
=
θ ω=
o, θ
at t = 0, r = 0, r = 0, θ = 0 ∴θ ( t ) =ωo t
(
N
mg
)
∑=
Fr ma r mgsin
=
θ m r − rθ 2
2
r − ω=
gsinωo t ← differential equation of r ( t )
or
r
r ( t )= rp + rh
θ
particular solution rp is a solution of r − ωo2 r =
gsinωo t
rp ( t ) = forced response of gsinωo t = Cgsinωo t
sub. into diff. eq. − Cωo2 gsinωo t − Cωo2 gsinωo t =
gsinωo t → C =
−
1
2ωo2
homogeneous solution rh is a solution of r − ωo2 r =
0
rh ( t ) free
=
( natural ) response Aest
sub. into diff. eq. As 2 est − Aωo2 est =
0, s =
ωo , − ωo
∴ rh ( t ) = Aeωo t + Be −ωo t
r ( t ) = rp + rh = Aeωo t + Be −ωo t −
1
2ωo2
gsinωo t, which must satisfy i.c.
r ( 0 ) ==+
0 A B and r ( 0 ) ==
0 Aωo − Bωo −
g
g
→ A = 2 , B =− 2
4ωo
4ωo
g
2ωo
g
∴ r = 2 ( sinh θ − sin θ )
2ωo
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/19
463
The small pendulum of mass m is suspended from a trolley
that runs on a horizontal rail. The trolley and pendulum are
initially at rest with θ= 0. If the trolley is given a constant
acceleration a = g, determine the maximum angle θmax
through which the pendulum swings. Also find the tension T
in the cord in terms of θ.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
lθ 2e
P. 8/19
464
n
n
lθe t
T
t
aP
gi
mg
use n-t coordinate to avoid unknown T in t-direction
[a=P
a C + a P/C ] translating axes attached to the cart to observe pendulum
=
a C gi =
a P/C lθ 2e n + lθe t
∑ Ft =
ma t − mgsinθ =
m −gcosθ + lθ
g
=
θ
( cos θ − sin θ ) as function of θ
l
θ
g
2
2 2 g ( sin θ + cos θ − 1)
θd=
θ θdθ θ /=
2 ∫ ( cos θ − sin θ ) dθ , θ=
l
l
0
θ or θ when θ =→
π /2
0 sin θ + cos θ =
1 ∴θ =
(
max
min
)
(
∑ Fn = ma n T − mgcosθ = m gsinθ + lθ 2
=
T mg ( 3sinθ + 3cos θ − 2 )
)
max
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/20
465
A small object is released from rest at A and slides with friction
down the circular path. If the coefficient of friction is 0.2,
determine the velocity of the object as it passes B. (Hint: Write
the equations of motion in the n- and t- directions, eliminate N,
and substitute vdv = atrdθ. The resulting equation is a linear
nonhomogeneous differential equation of the form
dy/dx + f ( x ) y =
g ( x ) , the solution of which is well known.)
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/20
(
∑ Fn= ma n
N − mgsinθ= m 3θ 2
)
mg
( )
eliminate N: gcosθ − 0.2 × ( gsinθ + 3θ ) =
3θ
1
dθ θdθ θ=
dθ 1 {gcosθ − 0.2 × ( gsinθ + 3θ )}=
θ=
dθ
d (θ )
3
2
d (θ )
2
+ 0.4 (θ ) =
g ( cosθ − 0.2sin θ ) , θ as a function of θ
dθ
3
∑ Ft ma t
=
466
θ − 0.2N m 3θ
mgcos=
n
2
2
2
F=0.2N
2
2
2
N
let θ 2 = u (θ ) and to solve the differential equation for u (θ )
t
u up + uh
=
2
g ( cosθ − 0.2sin θ ) =A cos θ + B sin θ
3
2
sub. into diff. eq. − A sin θ + B cos θ + 0.4 ( A cos θ + B sin θ =
) g ( cosθ − 0.2sin θ )
3
1.2
2 0.48
A
B −
match the coeff. of sinθ and cosθ : =
g =
g
3.48
3 3.48
u h (θ ) solution
of the homogeneous equation Cesθ
=
u p (θ ) =
forced response of
Csesθ + 0.4 × Cesθ =
0, s =
−0.4
u (θ )
∴=
1.2
2 0.48
−0.4θ
gcosθ + −
with=
u ( 0) 0
gsinθ + Ce
3.48
3 3.48
1.2
1.2
1.2 −0.4θ
2 0.48
g + C = 0 → u (θ ) = θ 2 =
gcosθ + −
ge
gsinθ −
3.48
3.48
3.48
3 3.48
at θ = π / 2, θ 2 = 3.382 → v = rθ = 5.52 m/s
B
Real world where friction exists makes the phenomena difficult
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/21
467
A small collar of mass m is given an initial
velocity of magnitude vo on the horizontal
circular track fabricated from a slender rod.
If the coefficient of kinetic friciton is μk,
determine the distance traveled before the
collar comes to rest. (Hint: Recognize that
the friction force depends on the net normal
force.)
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
468
P. 8/21
mg
n
y
Nh
Normal force has component N v and N h
t
F
Nv
∑ Fy 0=
N v mg
=
v2
∑ Fn ma
=
=
n
Nh m r
∑ Ft =ma t
− F =− µk N 2v + N 2h =ma t
µ
a t ds ] vdv − k r 2 m 2 g 2 + m 2 v 4 ds
[ vdv ==
mr
0
∫
vo
2µk
−rdv 2
=
2
2 2
r g + ( v2 )
v2 + v4 + r 2g 2
o
o
ds,
s
ln
=
∫0
2µ k
rg
s
r
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/22
469
The slotted arm OB rotates in a horizontal plane about point O
of the fixed circular cam with constant angular velocity θ =
15 rad/s. The spring has a stiffness of 5 kN/m and is
uncompressed when θ= 0. The smooth roller A has a mass
of 0.5 kg. Determine the normal force N that the cam exerts
on A and also the force R exerted on A by the sides of the slot
when θ= 45°. All surfaces are smooth. Neglect the small
diameter of the roller.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
470
P. 8/22
r
0.2
β
r
θ
θ
F
0.1
Kinematics: 0.22 = 0.12 + r 2 + 0.2rcosθ
θ − 0.2rθsinθ
diff: 0 =
2rr + 0.2rcos
N
β
R
θ − 0.2rθsinθ
0 = 2r 2 + 2rr + 0.2rcos
− 0.2rθsinθ − 0.2rθsinθ − 0.2rθ 2 cos θ
given:
=
θ π=
/ 4, θ 15 rad/s,
=
θ 0
1164 m, r 0.66
=
m/s, r 15.05 m/s 2
∴ r =0.=
0.2
0.1
=
,=
β 20.7°
sin135 sin β
Kinetics: spring force at θ= π / 4 : F= 5000 × ( r − 0.1) compressed
∑ F=
ma r
r
(
)
R − Nsin20.7 =
m ( rθ + 2rθ )
− F + Ncos20.7= m r − rθ 2
∑ Fθ =
maθ
N = 81.7 N R = 38.7 N
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
P. 8/23
471
The small cart is nudged with negligible
velocity from its horizontal position at A onto
the parabolic path that lies in a vertical plane.
Neglect friction and show that the cart
maintains contact with the path for all values
of k.
8.5 Curvilinear Motion
Ch. 8: Kinetics of Particles
472
P. 8/23
If the cart maintains contact, N > 0
use n-t coordinate since N aligns with the n-axis
3/ 2
1 + ( y ')2
dy
d2 y
2
=
=
k=
2k
( 2x ) tan θ =
ρ
y kx =
y ''
dx
dx 2
1 + 4k 2 x 2
ρ=
2k
3/ 2
mg
∑
Fn ma n
=
− N + mgcos
=
θ m
1 + tan θ sec
=
=
θ cosθ
2
2
v2
ρ
N
1
1 + 4k 2 x 2
n
∑ Ft ma
=
=
t
mgsinθ ma t
= a t ds ] vdv
= gsinθ=
= 2kgx 2
ds gdy, =
v 2 2gy
[ vdv
=
∴N
mg
1 + 4k 2 x 2
− 2mkgx 2 ×
dx
θ
ds dy
t
2k
mg
=
>0
2 2 3/ 2
2 2 3/ 2
1 + 4k x
1 + 4k x
8.5 Curvilinear Motion