Signal Processing 104 (2014) 319–324
Contents lists available at ScienceDirect
Signal Processing
journal homepage: www.elsevier.com/locate/sigpro
Fast communication
New blind source separation method of independent/
dependent sources
A. Keziou a,n, H. Fenniri b, A. Ghazdali c, E. Moreau d,e
a
Laboratoire de Mathématiques de Reims EA 4535, Université de Reims Champagne-Ardenne, France
CReSTIC, Université de Reims Champagne-Ardenne, France
LAMAI, FST, Université Cadi-Ayyad, Morocco
d
ENSAM, LSIS, UMR CNRS 7296, Université du Sud-Toulon-Var, France
e
Aix Marseille Université, France
b
c
a r t i c l e i n f o
abstract
Article history:
Received 24 January 2014
Received in revised form
4 April 2014
Accepted 19 April 2014
Available online 30 April 2014
We introduce a new blind source separation approach, based on modified Kullback–
Leibler divergence between copula densities, for both independent and dependent source
component signals. In the classical case of independent source components, the proposed
method generalizes the mutual information (between probability densities) procedure.
Moreover, it has the great advantage to be naturally extensible to separate mixtures of
dependent source components. Simulation results are presented showing the convergence and the efficiency of the proposed algorithms.
& 2014 Elsevier B.V. All rights reserved.
Keywords:
Blind source separation
Modified Kullback–Leibler divergence
between copulas
Mutual information
1. Introduction
Blind source separation (BSS) is an instrumental problem in signal processing which has been addressed in the
last three decades. We consider an instantaneous linear
mixture described by
xðtÞ ≔AsðtÞ þnðtÞ A Rp ;
ð1Þ
where A A Rpp is an unknown non-singular mixing
matrix, sðtÞ ≔ðs1 ðtÞ; …; sp ðtÞÞ > is the unknown vector of
source signals to be estimated from xðtÞ ≔ðx1 ðtÞ; …; xp ðtÞÞ > ,
the vector of observed signals. The number of sources and
the number of observations, for the present work, are
assumed to be equal. The presence of additive noise nðtÞ
within the mixing model complicates significantly the BSS
problem. It is reduced by applying some form of
n
Corresponding author.
E-mail addresses: amor.keziou@univ-reims.fr (A. Keziou),
hassan.fenniri@univ-reims.fr (H. Fenniri),
a.ghazdali@gmail.com (A. Ghazdali), moreau@univ-tln.fr (E. Moreau).
http://dx.doi.org/10.1016/j.sigpro.2014.04.017
0165-1684/& 2014 Elsevier B.V. All rights reserved.
preprocessing such as denoising the observed signals
through regularization approach, see e.g. [15]. The goal is
to estimate the vector source signals sðtÞ using only the
observed signals xðtÞ. The estimate yðtÞ of the source
signals sðtÞ can be written as
yðtÞ ¼ BxðtÞ;
ð2Þ
pp
where B A R
is the de-mixing matrix. The question is
b which has to be
how to obtain the de-mixing matrix B
close to the ideal solution A 1 , using only the observed
signals xðtÞ? It is well known, by Darmois theorem, that if
the source components are mutually independent and at
b
most one component is Gaussian, a consistent estimate B
of A 1 (up to scale and permutation indeterminacies of
rows) is the one that makes the components of the vector
yðtÞ independent; see e.g. [6]. The corresponding signals
b
b ðtÞ ≔BxðtÞ
y
are the estimate of the source signals sðtÞ.
Under the above hypotheses, many procedures have been
proposed in the literature. Some of these procedures use
second or higher order statistics, see e.g. [13,2] and the
references therein, others consist of optimizing (on the
320
A. Keziou et al. / Signal Processing 104 (2014) 319–324
de-mixing matrix space) an estimate of some measure of
dependency structure of the components of the vector yðtÞ.
As measures of dependence used in BSS, we find in the
literature the criterion of mutual information (MI) [14,7],
the criteria of α, β and Renyi's-divergences [5,19], and the
criteria of ϕ-divergences [15]. The procedures based on
minimizing estimates of MI are considered as the most
efficient, since this criterion can be estimated efficiently,
other procedures using divergences lead to robust method
for appropriate choice of divergence criterion [15]. In this
paper, we will focus on the criterion of MI (called also
modified Kullback–Leibler divergence), viewed as measure
of difference between copula densities, and we will use
it to propose a new BSS approach that applies in both cases
of independent or dependent source components. In the
following, we will show that the mutual information of
a random vector Y ≔ðY 1 ; …; Y p Þ > can be written as the
modified Kullback–Leibler divergence (KLm-divergence)
between the copula of independence and the copula of
the vector. Then, we propose a separation procedure based
on minimizing an appropriate estimate of KLm-divergence
between the copula density of independence and the
copula density of the vector. This approach applies in
the standard case, and we will show that the proposed
criterion can be naturally extended to separate mixture of
dependent source components. The proposed approach
can be adapted also to separate complex-valued signals. In
all the sequel, we assume that at most one source is
Gaussian, and we will treat separately the case of independent source components, and then the case of dependent source components. Chen et al. [3] proposed a BSS
algorithm (for independent source components) based
on minimizing a distance between the parameter of
the copula of the estimated source and the value of the
parameter corresponding to copula of independence. Ma
and Sun [9] proposed a different criterion combining the
MI between probability densities and Shannon entropy of
semiparametric models of copulas.
2. Brief recalls on copulas
Consider a random vector Y ≔ðY 1 ; …; Y p Þ > A Rp , p Z1,
with joint distribution function (d.f.) FY ðÞ: y A Rp ↦FY ðyÞ ≔
FY ðy1 ; …; yp Þ ≔PðY 1 ry1 ; …; Y p ryp Þ, and continuous marginal d.f.'s F Y j ðÞ: yj A R↦F Y j ðyj Þ ≔PðY j r yj Þ, 8 j ¼ 1; …; p. The
characterization theorem of Sklar [17] shows that there
exists a unique p-variate function CY ðÞ: ½0; 1p ↦½0; 1, such
that, FY ðyÞ ¼ CY ðF Y 1 ðy1 Þ; …; F Y p ðyp ÞÞ, 8 y ≔ðy1 ; …; yp Þ > A Rp .
The function CY ðÞ is called a copula and it is in itself a joint
d.f. on ½0; 1p with uniform marginals. We have for all
u ≔ðu1 ; …; up Þ > A ½0; 1p , CY ðuÞ ¼ PðF Y 1 ðY 1 Þ r u1 ; …; F Y p ðY p Þ
r up Þ. Conversely, for any marginal d.f.'s F 1 ðÞ; …; F p ðÞ,
and any copula function CðÞ, the function CðF 1 ðy1 Þ; …;
F p ðyp ÞÞ is a multivariate d.f. on Rp . On the other hand, since
the marginal d.f.'s F Y j ðÞ, j ¼ 1; …; p, are assumed to be
continuous, then the random variables F Y 1 ðY 1 Þ; …; F Y p ðY p Þ
are uniformly distributed on the interval [0, 1]. So, if the
components Y 1 ; …; Y p are statistically independent, then
the corresponding copula writes C0 ðuÞ ≔∏pj¼ 1 uj ; 8 u A
½0; 1p . It is called the copula of independence. Define,
when it exists, the copula density (of the random vector Y)
cY ðuÞ ≔ð∂p =∂u1 ⋯∂up ÞCY ðuÞ; 8 u A ½0; 1p . Hence, the copula
density of independence c0 ðÞ is the function taking the
value 1 on ½0; 1p and zero otherwise, namely,
c0 ðuÞ ≔1½0;1p ðuÞ;
8 u A ½0; 1p :
ð3Þ
Let f Y ðÞ, if it exists, be the probability density on Rp
of the random vector Y ≔ðY 1 ; …; Y p Þ > , and, respectively,
f Y 1 ðÞ; …; f Y p ðÞ, the marginal probability densities of the
random variables Y 1 ; …; Y p . Then, a straightforward computation shows that, for all y A Rp , we have
p
f Y ðyÞ ¼ ∏ f Y j ðyj ÞcY ðuÞ;
ð4Þ
j¼1
where u ≔ðu1 ; …; up Þ > ≔ðF Y 1 ðy1 Þ; …; F Y p ðyp ÞÞ > . In the
monographs by [11,8], the reader may find detailed
ingredients of the modeling theory as well as surveys of
the commonly used semiparametric copulas.
3. Mutual information and copulas
The MI of a random vector Y ≔ðY 1 ; …; Y p Þ > A Rp is
defined by
Z
∏pj¼ 1 f Y j ðyj Þ
f Y ðyÞ dy1 ⋯dyp :
MI ðY Þ ≔
log
ð5Þ
f Y ðyÞ
Rp
It is called also the modified Kullback–Leibler divergence
(KLm-divergence) between the product of the marginal
densities and the joint density of the vector. Note also that
MIðYÞ≕KLm ð∏pj¼ 1 f Y j ; f Y Þ is nonnegative and achieves its
minimum value zero if and only if (iff) f Y ðÞ ¼ ∏pj¼ 1 f Y j ðÞ,
i.e., iff the components of the random vector Y are statistically independent. An equivalent formula of (5) is
!
∏pj¼ 1 f Y j ðY j Þ
MI ðY Þ ≔E log
;
ð6Þ
f Y ðYÞ
where EðÞ is the mathematical expectation. Using the
relation (4), and applying the change variable formula for
multiple integrals, we can show that MIðYÞ can be written
as
Z
1
cY ðuÞ du≕KLm ðc0 ; cY Þ
log
MI ðY Þ ¼
cY ðuÞ
½0;1p
¼ Eðlog cY ðF Y 1 ðY 1 Þ; …; F Y p ðY p ÞÞÞ≕ HðcY Þ;
R
where HðcY Þ ≔ ½0;1p logðcY ðuÞÞcY ðuÞ du is the Shannon
entropy of the copula density cY ðÞ. The relation above
means that the MI of the random vector Y can be seen as
the KLm-divergence between the copula density of independent c0 ðÞ, see (3), and the copula density cY ðÞ of the
random vector Y. We summarize the above results in the
following proposition.
Proposition 1. Let Y A Rp be any random vector with
continuous marginal distribution functions. Then, the MI of
Y can be written as the KLm-divergence between the copula
density c0 of independence and the copula density of the
vector Y:
Z
1
MI ðY Þ ¼
cY ðuÞ du≕KLm ðc0 ; cY Þ
log
cY ðuÞ
½0;1p
¼ Eðlog cY ðF Y 1 ðY 1 Þ; …; F Y p ðY p ÞÞÞ:
ð7Þ
A. Keziou et al. / Signal Processing 104 (2014) 319–324
Moreover, KLm ðc0 ; cY Þ is nonnegative and takes the value zero
iff cY ðuÞ ¼ c0 ðuÞ≕1½0;1p ðuÞ, 8 u A ½0; 1p , i.e., iff the components of the vector Y are statistically independent.
4. A separation procedure for mixtures of independent
sources through copulas
In this section, we describe our approach based on
minimizing a nonparametric estimate of the KLm-divergence KLm ðc0 ; cY Þ, assuming that the source components
are independent. Denote by S ≔ðS1 ; …; Sp Þ > the random
source vector, X ≔AS the observed random vector and
Y ≔BX the estimated random source vector. The discrete
(noise free) version of the mixture model (1) writes xðnÞ ≔
AsðnÞ; n ¼ 1; …; N. The source signals sðnÞ; n ¼ 1; …; N, will
be considered as N i.i.d. copies of the random source vector
S, and then xðnÞ; yðnÞ ≔BxðnÞ; n ¼ 1; …; N, are, respectively,
N i.i.d. copies of the random vectors X and Y ≔BX. When
the source signal data sðnÞ; n ¼ 1; …; N, are not i.i.d., such
as cyclo-stationary sources, see e.g. [10], we can return to
the above i.i.d. case, by developing the observed signals
xðnÞ; n ¼ 1; …; N, following some harmonic or trigonometric basis, and then separate the error vector components ϵ ≔ðϵ1 ; …; ϵp Þ > from the data ϵðnÞ; n ¼ 1; …; N, which
can be assumed i.i.d. copies of ϵ. Note that, by the linearity
of the problem, the separating matrix will be the same for
the original observed signals xðÞ or the errors signals ϵðÞ.
The same methodology can be used for Section 5 below. In
view of Proposition 1, the function B↦KLm ðc0 ; cY Þ is non-
density. A more appropriate choice of the kernel kðÞ, for
estimating the copula density, can be done according to
[12], which copes with the boundary effect. The bandwidth parameters H 1 ; …; H p in (9) and h1 ; …; hp in (10) will
be chosen according to Silverman's rule of thumb, see e.g.
[16], i.e., for all j ¼ 1; …; p, we take
1=ðp þ 4Þ
1=5
4
b j N 1=ðp þ 4Þ and hj ¼ 4
b j N 1=5 ;
Hj ¼
s
Σ
p þ2
3
b j and s
b j are, respectively, the empirical standard
where Σ
deviation of the data Fb Y ðy ð1ÞÞ; …; Fb Y ðy ðNÞÞ and
j
1 N
d
KL
∑ log b
c Y Fb Y 1 y1 ðnÞ ; …; Fb Y p yp ðnÞ ;
m ðc0 ; cY Þ ≔
Nn¼1
ð8Þ
j
j
from the proper definitions of the estimates as follows:
d
b
b b
d
dKL
1 N dB c Y F Y 1 y1 ðnÞ ; …; F Y p yp ðnÞ
m ðc0 ; cY Þ
¼
∑
;
dB
Nn¼1
b
c YðFb Y 1 ðy1 ðnÞÞ; …; Fb Y p ðyp ðnÞÞÞ
ð11Þ
where d=dB ≔ð∂=∂Bij Þij , i; j ¼ 1; …; p, and
∂b
c Y ðFb Y 1 ðy1 ðnÞÞ; …; Fb Y p ðyp ðnÞÞÞ
∂Bij
¼
N
1
∑
NH 1 ⋯H p m ¼ 1
0
negative and achieves its minimum value zero iff B ¼ A
(up to scale and permutation indeterminacies). In other
b
b ðnÞ ¼ BxðnÞ;
mated source signals y
n ¼ 1; …; N. Based on
the equality (7), we propose to estimate the KLm-divergence KLm ðc0 ; cY Þ by a “plug-in” type procedure. We obtain
then the estimate
j
b the estimate of the
yj ð1Þ; …; yj ðNÞ. In order to compute B,
de-mixing matrix, we can use a gradient descent algorithm taking as initial matrix B0 ¼ I p , the p p identity
d
matrix. The gradient in B of KL
m ðc0 ; cY Þ can be explicated
1
words, we have A 1 ¼ arg inf B KLm ðc0 ; cY Þ. Hence, to
achieve separation, the idea is to minimize on B some
d
statistical estimate KL
m ðc0 ; cY Þ, of KLm ðc0 ; cY Þ, constructed
from the data yð1Þ; …; yðnÞ. The separation matrix is then
d
b ≔arg inf B KL
estimated by B
m ðc0 ; cY Þ, leading to the esti-
321
k
p
∏
j ¼ 1;j a i
k
!
Fb Y j ðyj ðmÞÞ Fb Y j ðyj ðnÞÞ
Hj
1
!
b
b
Fb Y i ðyi ðmÞÞ Fb Y i ðyi ðnÞÞ 1 ∂ F Y i ðyi ðmÞÞ F Y i ðyi ðnÞÞ A
;
∂Bij
Hi
Hi
with
∂Fb Y i ðyi ðmÞÞ
1 N
y ðℓÞ yi ðmÞ ¼
∑ k i
xj ðℓÞ xj ðmÞ
∂Bij
Nhi ℓ ¼ 1
hi
and
∂Fb Y i ðyi ðnÞÞ
1 N
y ðℓÞ yi ðnÞ ¼
∑ k i
xj ðℓÞ xj ðnÞ :
∂Bij
Nhi ℓ ¼ 1
hi
5. A solution to the BSS for dependent source
components
where
!
p
N
Fb Y j ðyj ðmÞÞ uj
1
b
c Y ð uÞ ≔
∑ ∏ k
;
NH 1 ⋯H p m ¼ 1 j ¼ 1
Hj
ð9Þ
for all u A ½0; 1p , is the kernel estimate of the copula density cY ðÞ, and Fb Y j ðxÞ, 8 j ¼ 1; …; p, is the smoothed estimate
of the marginal distribution function F Y j ðxÞ of the random
variable Yj, at any real value x A R, defined by
yj ðℓÞ x
1 N
Fb Y j ðxÞ ≔ ∑ K
;
ð10Þ
Nℓ¼1
hj
where KðÞ is the primitive of a kernel kðÞ, a symmetric
centered probability density. In our forthcoming simulation study, we will take as kernel kðÞ a standard Gaussian
We give in the following subsections a solution to
the BSS problem for mixtures of dependent component
sources. The method depends on the knowledge about the
dependency structure of the source components.
5.1. When both the model and the parameter are known
Assume that we dispose of some prior information
about the density copula of the random source vector S.
Note that this is possible for many practical problems, it
can be done, from realizations of S, by a model selection
procedure in semiparametric copula density models
fcθ ðÞ; θ A Θ Rd g, typically indexed by a multivariate parameter θ, see e.g. [4]. The parameter θ can be estimated
322
A. Keziou et al. / Signal Processing 104 (2014) 319–324
using maximum semiparametric likelihood, see [18,1].
Denote by θ0 the obtained value of θ and cθ0 ðÞ the copula
density modeling the dependency structure of the source
components. Obviously, since the source components are
assumed to be dependent, cθ0 ðÞ is different from the
density copula of independence c0 ðÞ. Hence, we naturally
replace, in the above criterion function B↦KLm ðc0 ; cY Þ, c0
by cθ0 . Moreover, we can show that the criterion function
B↦KLm ðcθ0 ; cY Þ is nonnegative and achieves its minimum
value zero iff B ¼ A 1 (up to scale and permutation
indeterminacies), i.e., A 1 ¼ arg inf B KLm ðcθ0 ; cY Þ, provided
that the copula density cθ0 ðÞ of S satisfies the following
assumption (C.A): for any regular matrix M, if the copula
density of MS is equal to cθ0 ðÞ, then M ¼ DP, where D is
diagonal and P is a permutation. Note also that the
criterion KLm ðcθ0 ; cY Þ can be written as
!!
cY ðF Y 1 ðY 1 Þ; …; F Y p ðY p ÞÞ
KLm cθ0 ; cY ¼ E log
:
cθ0 ðF Y 1 ðY 1 Þ; …; F Y p ðY p ÞÞ
So as before, we propose to estimate the de-mixing matrix
d
b ≔arg inf B KL
by B
m ðcθ0 ; cY Þ, where
bY ðFb Y 1 ðy1 ðnÞÞ; …; Fb Y p ðyp ðnÞÞÞ
1 N
c
d
KL
∑ log
:
m cθ0 ; cY ≔
Nn ¼ 1
cθ0 ðFb Y 1 ðy1 ðnÞÞ; …; Fb Y p ðyp ðnÞÞÞ
The estimates of copula density and the marginal distribub can be
tion functions are defined as before. The solution B
computed by a descent gradient algorithm. The gradient in
B can be explicitly computed in a similar way as in (11)
b
b ðnÞ ¼ BxðnÞ;
Section 4. The estimated source signals are y
indeterminacies), provided that the copula density model
fcθ ðÞ; θA Θ Rd g of S satisfies the following identifiability
assumption (C.B): for any regular matrix M, if the copula
density of MS A fcθ ðÞ; θ A Θ Rd g, then M ¼ DP, where D is
diagonal and P is a permutation.
5.3. When both the model and the parameter are unknown
In this case, we can use the following methodology. We
consider a class of L models of copula densities of the
source components, denoted M1 ≔fc1θ1 ðÞ; θ1 A Θ1 g; …; M L ≔
fcLθL ðÞ; θL A ΘL g. Here, the goal is to separate the source
signal using the true unknown model of dependency of
the sources. Assume that each model Mi, i¼1,…,L, satisfies
the identifiability condition (C.B) in the above subsection.
Then, the criterion function B↦inf ℓ ¼ 1;…;L inf θℓ A Θℓ KLm
ðcℓθℓ ; cY Þ is nonnegative and achieves its minimum value
zero iff B ¼ A 1 (up to scale and permutation indeterminacies). Hence, we propose to apply the method described
in the above subsection for each model, and then
choose the solution that minimizes the criterion over all
considered models, i.e.,
ℓn
b ≔arg inf inf KL
d
B
m ðcθ ; cY Þ
B
θ A Θ ℓn
where
ℓ
d
ℓn ≔arg min inf inf KL
m ðcθ ; cY Þ:
ℓ ¼ 1;…;L B
θ A Θℓ
6. Simulation results
n ¼ 1; …; N. We obtain then the following algorithm.
Algorithm 1. A copula based BSS algorithm for dependent
component sources.
Data : the observed signals xðnÞ; n ¼ 1; …; N
b ðnÞ; n ¼ 1; …; N
Result : the estimated sources y
Initialization : y0 ðnÞ ¼ B0 xðnÞ, B0 ¼ I p . Given ε 4 0 and μ 40
suitably choosen
Do
Update B and y:
cm ðcθ ;cY Þ
dKL
0
Bk þ 1 ¼ Bk μ
dB
B ¼ Bk
yk þ 1 ðnÞ ¼ Bk þ 1 xðnÞ; n ¼ 1; …; N
Until
J Bk þ 1 Bk J o ε
b ðnÞ ¼ yk þ 1 ðnÞ; n ¼ 1; …; N
y
5.2. When the model is known and the parameter is
unknown
Denote by fcθ ðÞ; θ A Θ Rd g the semiparametric copula
density model of the source components. Since the parameter θ is unknown, we propose to adapt the above
criterion and to estimate the demixing matrix by
b ≔arg inf B inf θ A Θ KL
d
B
m ðcθ ; cY Þ, which can be computed
using the gradient (on both B and θ) of the criterion
d
function ðB; θÞ↦KL
m ðcθ ; cY Þ. Note that the criterion function
B↦inf θ A Θ KLm ðcθ ; cY Þ is nonnegative and achieves its mini-
mum value zero iff B ¼ A 1 (up to scale and permutation
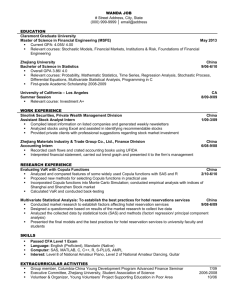
In this section, we give simulation results for the proposed method. We dealt with instantaneous mixtures
(2 mixtures of 2 sources) of five kinds of sample sources:
uniform i.i.d. with independent components (Fig. 1a); i.i.d.
sources with independent components where the marginals are drawn from the 4-ASK (Amplitude Shift Keying)
alphabets ( 3, 1,1,3 with equal probabilities 0.25) at
which was added a centered Gaussian random variable
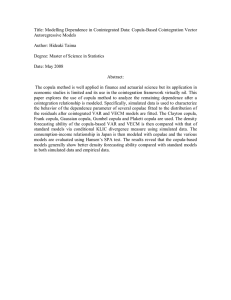
with variance equal to 0.25 (Fig. 1b); i.i.d. (with uniform
marginals) vector sources with dependent components
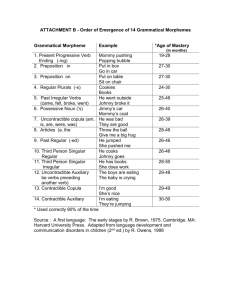
generated from Fairlie–Gumbel–Morgenstern (FGM)copula with θ0 ¼ 0:8 (Fig. 2); i.i.d. (with uniform marginals
in Fig. 3a and binary phase-shift keying (BPSK)-marginals
in Fig. 3b) vector sources with dependent components
generated from Ali–Mikhail–Haq (AMH)-copula with
θ0 ¼ 0:6. The accuracy of source estimation is evaluated
through the signal-noise-ratio (SNR), defined by SNRi ≔
2
2
N
b
10 log10 ∑N
In the
n ¼ 1 si ðnÞ =∑n ¼ 1 ðy i ðnÞ si ðnÞÞ ; i ¼ 1; 2.
standard case of independent source components, the
proposed method described in Section 4 is compared with
the MI one proposed by [14], under the same conditions,
see Fig. 1. The used mixing matrix is A ≔½1 0:5; 0:5 1. The
number of samples is N ¼2000, and all simulations are
repeated 100 times. The gradient descent parameter is
taken μ ¼0.1 in all cases. We observe from Fig. 1 that the
proposed method gives good results for the standard case
of independent component sources. Moreover, we see,
from Figs. 2 and 3, that our proposed method is able to
separate, with good performance, mixtures of dependent
source components.
A. Keziou et al. / Signal Processing 104 (2014) 319–324
55
50
50
45
45
40
35
35
SNR (dB)
SNR (dB)
40
30
25
30
25
20
20
15
15
0
10
20
30
40
50
KLm_C
MI
10
KLm_C
MI
10
5
323
60
5
70
0
10
20
Iterations
30
40
50
Iterations
Fig. 1. SNRs vs iterations with independent sources. (a) Uniform sources. (b) ASK sources.
50
0.7
45
0.6
40
0.5
criterion value
SNR (dB)
35
30
25
0.4
0.3
20
0.2
15
10
5
0.1
SNR_y1
SNR_y2
0
10
20
30
40
50
0
60
0
10
20
Iterations
30
40
50
60
Iterations
55
55
50
50
45
45
40
40
35
35
SNR (dB)
SNR (dB)
Fig. 2. Separation of dependent sources from FGM copula. (a) SNRs vs iterations. (b) Criterion vs iterations.
30
25
30
25
20
20
15
15
SNR_y1
SNR_y2
10
5
0
50
100
Iterations
150
SNR_y1
SNR_y2
10
200
5
0
50
100
Iterations
Fig. 3. SNRs vs iterations with dependent sources from AMH copula. (a) Uniform sources. (b) BPSK sources.
150
200
324
A. Keziou et al. / Signal Processing 104 (2014) 319–324
7. Conclusion
We have proposed a new BSS approach by minimizing
the empirical KLm-divergence between copula densities.
The approach is able to separate instantaneous linear
mixtures of both independent and dependent source
components. In Section 6, the accuracy and the consistency of the obtained algorithms are illustrated by simulation, for 2 2 mixture-source. Other simulation examples
give similar results for the case of 3 3 mixture-source.
It should be mentioned that our proposed algorithms
based on copula densities, rather than the classical ones
based on probability densities, are more time consuming,
since we estimate both copulas density of the vector and
the marginal distribution function of each component. The
present approach can be extended to deal with convolutive mixtures, and it will be interesting also to investigate a
theoretical study of the identifiability assumptions as well
as the convergence of the proposed algorithms. These
developments are beyond the scope of the present paper,
and will be addressed in future communications.
Acknowledgments
Thanks to Egide PHC-Volubilis program for funding the
project 27093ND - MA/12/270. The authors wish to thank
the reviewers for their constructive comments and criticisms leading to improvement of this paper.
References
[1] S. Bouzebda, A. Keziou, New estimates and tests of independence in
some copula models via ϕ-divergences, Kybernetika 46 (1) (2010)
178–201.
[2] M. Castella, S. Rhioui, E. Moreau, J.-C. Pesquet, Quadratic higher order
criteria for iterative blind separation of a MIMO convolutive mixture of
sources, IEEE Trans. Signal Process. 55 (1) (2007) 218–232.
[3] R.B. Chen, M. Guo, W. Hardle, S. Huang, Independent component
analysis via copula techniques, SFB 649 Discussion Paper 2008-004,
2008.
[4] X. Chen, Y. Fan, Pseudo-likelihood ratio tests for semiparametric
multivariate copula model selection, Can. J. Stat. 33 (3) (2005)
389–414.
[5] A. Cichocki, S.-i. Amari, Families of alpha- beta- and gammadivergences: flexible and robust measures of similarities, Entropy
12 (6) (2010) 1532–1568.
[6] P. Comon, Independent component analysis, a new concept? Signal
Process. 36 (3) (1994) 287–314.
[7] M. El Rhabi, G. Gelle, H. Fenniri, G. Delaunay, A penalized mutual
information criterion for blind separation of convolutive mixtures,
Signal Process. 84 (10) (2004) 1979–1984.
[8] H. Joe, Multivariate Models and Dependence Concepts, Monographs
on Statistics and Applied Probability, vol. 73, Chapman & Hall,
London, 1997.
[9] J. Ma, J. Sun, Copula component analysis, in: ICA 2007, 2007, pp. 73–80.
[10] W. Naanaa, J.-M. Nuzillard, Blind source separation of positive and
partially correlated data, Signal Process. 85 (9) (2005) 1711–1722.
[11] R.B. Nelsen, An Introduction to Copulas, Springer Series in Statistics,
second ed., Springer, New York, 2006.
[12] M. Omelka, I. Gijbels, N. Veraverbeke, Improved kernel estimation of
copulas: weak convergence and goodness-of-fit testing, Ann. Stat.
37 (5B) (2009) 3023–3058.
[13] J.-C. Pesquet, E. Moreau, Cumulant-based independence measures
for linear mixtures, IEEE Trans. Inf. Theory 47 (5) (2001) 1947–1956.
[14] D.-T. Pham, Mutual information approach to blind separation of
stationary sources, IEEE Trans. Inf. Theory 48 (7) (2002).
[15] M.E. Rhabi, H. Fenniri, A. Keziou, E. Moreau, A robust algorithm for
convolutive blind source separation in presence of noise, Signal
Process. 93 (4) (2013) 818–827.
[16] B.W. Silverman, Density Estimation for Statistics and Data Analysis,
Monographs on Statistics and Applied Probability, Chapman & Hall,
London, 1986.
[17] A. Sklar, Fonctions de répartition à n dimensions et leurs marges,
Publ. Inst. Stat. Univ. Paris 8 (1959) 229–231.
[18] H. Tsukahara, Semiparametric estimation in copula models, Can.
J. Stat. 33 (3) (2005) 357–375.
[19] F. Vrins, D.-T. Pham, M. Verleysen, Is the general form of Renyi's
entropy a contrast for source separation? in: Lecture Notes in
Computer Science, vol. 4666/2007, Springer, Berlin, 2007.