Speed and Current Controllers Design of BLDC Motor Using SNR

International Research Journal of Applied and Basic Sciences
© 2013 Available online at www.irjabs.com
ISSN 2251-838X / Vol, 4 (1): 99-106
Science Explorer Publications
Speed and Current Controllers Design of BLDC
Motor Using SNR Optimization Technique
H. Shayeghi, A. Akbarimajd, A. Mohammadian,G. Shokri
Technical Eng. Department, University of Mohaghegh Ardabili, Ardabil, Iran
Corresponding Author email: hshayeghi@gmail.com
ABSTRACT: In this paper, a novel tuning technique for the current and speed controllers of the
Brushless DC (BLDC) motor derive system is presented. The parameters of PI controllers in the inner current control loop and outer speed control loop which vary with the operating conditions such as variation of temperature and saturation phenomena or load torque changing of the drive are adjusted in order to maintain deadbeat response for speed and current of motor. A Signal-to- Noise Ratio (SNR) optimization technique is employed in this study to obtain optimal parameters of PI controllers. Results of the proposed technique are compared with the response of Particle Swarm Optimization (PSO) technique. Simulation results show that the proposed optimized PI controllers improves significantly the dynamical performances of the motor derive system such as settling time and overshoot against parametric uncertainties. Also, it is superior to the designed controller using PSO method one.
Keywords: BLDC drive, SNR, PSO, Speed and Current Controllers
INTRODUCTION
The brushless direct current (BLDC) drives are becoming more and more attractive and can directly compete with the other types of drives in industries such as appliances, automotive, aerospace, consumer, medical, industries automation equipment and military (J. Chiasson 2005). This drive is a type of permanent magnet synchronous motors, so they are inherently efficient due to the lower rotor losses. They also have high power and torque density, lower maintenance high reliability, simple structure, large starting torque and they have low inertia, allowing for faster dynamic response (Yong et al. 2005). The disadvantages of BLDC drives are their higher cost of permanent magnets and power electronic devices. However, the disadvantages can be eliminating by development in power electronic technology, power semiconductor and manufacturing technology for high performance magnetic materials in the last decade (KT Chau et al 2008). BLDC motor drives are driven by dc voltage but current commutation is done by six-switch inverter and switching is determined by the rotor position and the position of the rotor is detected either by Hall-position sensors or by sensorless techniques
Chau et al 2008).
Recently, many current control techniques have been developed. Each approach has its own advantages and limitations. Hysteresis and pulse width modulation (PWM) current control methods with continuous control theory have produced the most widely used BLDC motor control techniques. Hysteresis current control is toward achieving adequate servo performance, namely, instantaneous torque control, yielding faster speed response compared two PWM control.
For most industrial application, proportional-integral (PI) current and speed controllers are sufficient to compensation of speed and torque of drives. In other cases, state feedback control is needed to achieve a more precise control of BLDC drive. However, classic control theory and linear system theory are simple in realization, but is complex due to changing in the motor operation condition such as variety armature resistance at different operating temperature or load torque that varies with the motor speed. Thus, it requires extensive control system knowledge to obtained controller parameters (A. Sathyan et al 2009).
The feedback linearization control technique has been applied to the control of nonlinear plants such as induction and BLDC drives . Some modern control methods such as variable structure control (FJ. Lin et al. 1999) and adaptive control (E. Cerruto et al. 1995) have been applied for
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013 the solution of the BLDC motor control. However, these control techniques are difficult to implement or in theoretical bases.
Despite the potential of the modern control techniques with different structure, Proportional Integral
Derivative (PID) type controller is still widely used for BLDC derive system (Lin et al. 2003). PID controller offers the simplest and yet most efficient solution for many real world control problems. This is because it performs well for a wide class of process due to its three term functionality covering treatment to both transient and steady-states response. On the other hand, Shayeghi and Dadashpour (2012) revealed that the appropriate tuning of PID controller results in satisfactory performance during system upsets. Thus, the optimal tuning of a PID gains is required to get the desired level of robust performance. Since optimal setting of PID controller gains is a multimodal optimization problem (i.e., there exists more than one local optimum) and more complex due to nonlinearity, complexity and time-variability of the real world power systems operation. Hence, local optimization techniques, which are well elaborated upon, are not suitable for such a problem.
Recently, global optimization techniques like genetic algorithm (CL. Lin et al. 2003), Particle Swarm
Optimization (PSO) method (EH. Bayoumi & HM. Soliman 2007, M. Naseri et al. 2007) and ant colony search algorithm (N. Navidi et al., 2009) ) have been applied for optimal tuning of PID controller of the BLDC derive system. These evolutionary algorithms are heuristic population-based search procedures that incorporate random variation and selection operators. Although, they seem to be good approaches for the solution of PID gains optimization problem, However, when the system has a highly epistatic objective function (i.e. where parameters being optimized are highly correlated), and number of parameters to be optimized is large, then they have degraded efficiency to obtain global optimum solution. In order to overcome these drawbacks, the Signal-to-Noise
Ratio (SNR) algorithm is used to adapt PI controller parameters assuring deadbeat response for the current and speed of BLDC drives at certain loading conditions. This algorithm doesn’t require a wide solution space, and the large number of searching and iterations were susceptible to related control parameters. On the other hand, it has an efficient appliance and better result for uncertainties conditions and different operation points.
In this study, the problem of robustly PI controller tuning for speed and current control of BLDC derive system is formulated as an optimization problem based on time domain based objective function. The optimization is carried out under multiple operation points by SNR algorithm such that the relative stability is undertaken and the time domain specifications concurrently secured. The robustness of the SNR based optimized PI controller is revealed in comparison with the designed controller using PSO method through time domain simulation studies and some performance indices. Results evaluation show that the proposed method is useful and alternative to PI controller design as it retains the simplicity of the controller and still guarantees a robust acceptable performance over a wide range of operating and system conditions. problem statement
Signal to Noise Ratio
In this paper, SNR algorithm is used to evaluate existence possibility of optimal value in PI/PID controller parameters for BLDC system. This algorithm doesn’t require a wide solution space, and the large number of searching and iterations were susceptible to related control parameters. On the other hand, this method has an effective appliance and better result for uncertainties conditions and different operation points (W.-M. Lin et al.
2011). Also, it has a responsible result in the nonlinear systems optimization.
This algorithm starts with a measure of the variation within a trial when noise factors present. SNR consolidates several repetitions into one value that reflects the amount of variation present. There SNR are defined depending on the type of characteristic desired, Higher is Better (HB), Lower is Better (LB) and Nominal is Best
(NB). The equation for calculating LB characteristics is expressed by (W.-M. Lin et al., 2011):
SNR = − log( a y
2
+ b S
2
) (1)
Where, y and S are the average and standard deviation and a and b are the weights. It is evident, when the values of y and S are small, SNR is big. This feature of SNR can be used to search the saddle points. The Eq.
(1) is modified to make SNR capable of searching the minimum value as follows:
SNR = a y b S (2)
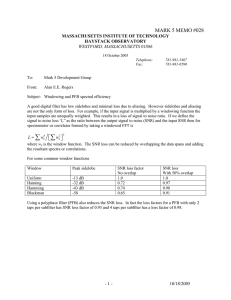
According to Eq. (2), it is obvious that SNR is a statistical calculation and composed of the average y and standard deviation S only. No matter how the functions of generating units have characteristics in the shapes, SNR can detect the rugged region of space exactly. Thus, it is possible that the solution space contains the global minimum value for smaller SNR. The flowchart of SNR is shown in Fig. 1.
100
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013
Start
Initialization
SNR for Initial Population
Function value calculating
Sort function value
Perform SNR for local search
Meet
stopping criterion
Yes
No
Display the optimal solution
END
Figure1. SNR optimization algorithm flowchart
In general, two arbitrary input considerate for SNR algorithm, one is for signal and the other is for noise.
This inputs are selected in range [0 1] due to the naturally of SNR algorithm (W. Min Lin et al 2011). Therefore, if the signal and noise are stand in this range, the results will be having a same signed and comparison for the best selecting will be without mistake.
MATHEMATICAL MODEL FOR SQUARE-WAVE BLDC MOTOR
The BLDC motor is fed from a DC source and despite the name; these motors are a type of permanent magnet synchronous motors as shown in Fig. 2 ! " #$ & HM. Soliman 2007).
BLDC motors exist in many different configurations, but the three phase motor is the most common type and the switching pattern of the six switch inverter implies that one switch of the upper phase leg is always conducting with one switch from the lower phase leg. Then, three phase BLDC motor is operated in a two phases on fashion. The voltage equation of motor can be described by (4).
V dc
= 2 R i + ( − ) di a dt
+ e
1
− e
2
= R i + L a di dt a
+ e
1
− e
2
= R i + L a di dt a
+ K b
ω
(3)
T e
= K b i a
The electromagnetic torque is linearly proportional to the armature current and the equation is given by:
(4)
The load torque is considered to vary with the motor speed and the proportionality factor is a nonlinear constant, which depends on the loading condition. Thus, it is could be expressed as:
T
L
= K
T
ω (5)
And the motion equation can be expressed as:
T e
− T
L
= J d ω
+ B ω
(6) dt
Where, V dc is the voltage of the DC supply, R s
is the stator winding resistance, L and M are the selfinductance and mutual inductance by different windings, e
1
, e
2
denote the induced electromotive forces of stator windings.
The block diagram of the BLDC motor drive system is shown in Fig. 3. It has two controllers: one in outer loop for speed control, and another in the inner loop for current control. Both controllers are tuned in this study to
101
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013 be of the proportional-integral (PI) type. Each controller has two gains. The motor and transfer function parameters of system components are listed in the Table1 (M. A. Awadallah et al 2009).
Table 1. The motor and transfer function parameters of system
Parameter Size (unit) Symbol
Converter gain
Converter time constant
Current transducer gain
16 v/v
50µs
0.288v/A
K r
T r
K c
Current transducer time 0.159µs
0.0239V.sec
Speed sensor time constant
Armature resistance
Armature inductance
Moment of inertia
EMF constant
Coefficient of friction
1ms
1.4
%
2.44mH
0.0002 kg.m2
0.513 V.sec
0.002125
N.m.sec/rad
T c
K w
T w
R a
L a
J
K b
B
Figure 2. Circuit diagram of the BLDC motor
Figure 3. Block diagram of the BLDC motor drive system
Problem Formulation
The propose of this study is tuning the parameters of speed and current controllers of BLDC motors in the high performance applications under different operation conditions related to load and variation of electrical machine parameters. As shown in Fig. 3 the system utilizes two PI controllers, the outer is speed and inner is current control loop, respectively. It should be noted that the transient performance of the BLDC system obviously depends on the optimal tuning of the both PI controller's parameters.
The parameters of both controllers are adapted to cope with the varying operating conditions of the system
(M. A. Awadallah et al 2009). The moment of inertia of the shaft and attached load, J, the load torque constant, K
T
, vary due to the conditions of the mechanical loading at the motor shaft. Also, the e ective value of the R a
, changes with the load on the motor. The reason is that the stator current of the motor increases with the mechanical load leading to an increase in the temperature rise due to copper loss. No other parameter of the system seems to change significantly with the operating conditions. Thus, the gains of both speed and current controllers should be tuned based on the J, K
T
, and R a parameters of the system. Thus, to illustrate the capability of the proposed strategy, in the view point of uncertainty our focus will be concentrated on variation of these parameters. In the inner current control loop, R a
is the only varying system parameter. Thus, the gains of the current controller should be tuned solely based on R a
changes. It is well known that the conventional methods of tune PI gains not able to
102
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013 locate or identify the global optimum for achieving the desired level of system robust performance due to the plant parameter changes. In order to overcome these drawbacks and provide optimal control performance, SNR optimization algorithm is proposed to optimal tune of PI gains under different operating conditions. Fig. 4 shows the block diagram of SNR based tuned PI controllers for the BLDC system (Fig. 3).
SNR Technique
Optimal PI controller's
ref
PI
Controller
PWM
BLDC
Motor
SNR Based PI Controller
Figure 4. The proposed SNR based PI controller structure.
In general, the Integrated of Absolute Error (IAE) or the Integral of Squared-error (ISE) is often utilized for the PI controller design. However, the minimization of IAE and ISE criteria can result in a response with relatively small overshoot but a long settling time, because the ISE performance criterion weights all errors equally independent of time (H. Shayeghi & J. Dadashpour, 2012).
In this paper, a new performance criterion in the time domain is proposed under multiple operation points that optimized by using of SNR technique. It is the Integral of the Time multiplied Absolute Value of the Error (ITAE) fitness function considered as follows:
J
Current
=
NP
( ( t i − i dt × NP (7) i = 1
J
Speed
= (
NP
( t ω i
− ω ref dt ×
4
10 ) / NP (8) i = 1
Where, t sim is the time range of simulation; NP is the total number of operating points for which the optimization is carried out. The cost functions as given by Eqs. (7) and (8) is used to obtain the gains of PI speed and current controllers in different load points work, respectively.
The current response is known to be much faster than the speed response, because naturally the electrical time constant is faster than mechanical time constant. Thus, the value of the R a
does not affect the performance of the velocity control loop. The gains of the speed controller should be adjusted only with the moment of inertia (J) and the torque constant (K t
) which varies independently, while R a
is fixed at its nominal value for all design steps of the speed controller.
The multiple operating conditions for the system are completely defined by the different values of the R a
for current controller and the J and K t
parameters changes for the speed controller in the BLDC derive system. These parameters are assumed to vary independently over the following ranges:
• R a
changes from 50% to 150% of its nominal value by step 25%
• J changes from 100% to 500% of its nominal value by step 100%
• K t changes from 50% to 200% of its nominal value by step 50%
For objective function calculation, the time-domain simulation of the BLDC system model is carried out for the simulation period. It is aimed to minimize this objective function in order to improve the system response in terms of the settling time and overshoots. Thus, the design problem can be formulated as the following constrained optimization problem, where the constraints are the PI controller parameter bounds.
Minimize J
K
P min
≤ K
P
≤ K max
P
(9)
K
D min
≤ K
D
≤ K max
D
Typical range of the optimized parameters is in [0.01-250] interval. To improve the overall system dynamical performance in a robust way and optimization synthesis, this paper employs SNR technique to solve the above optimization problem and search for optimal or near optimal set gains of both PI controllers for speed and current control loop. The final value of the optimized parameters using PSO !
& EH. Bayoumi
103
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013
& HM. Soliman 2007) and SNR techniques is given in Table 3. Also, Fig. 5 shows the fitness convergence by PSO and SNR methods.
Table 3. Optimized parameters of PID controller
Optimizatio
Algorithm
Current controller Speed controller
SNR
PSO
K
P
0.5920
0.6140
K
I
215.36
229.68
K
P
0.4628
0.1218
K
I
0.0824
0.7918
6 x 10
-7
5.8
5.6
5.4
5.2
5
0 10 20 30 40 50
Figure 5. Fitness convergence for speed control loop, Dashed (SNR) and Solid (PSO)
SIMULATION RESULTS
A. Current controller
The proposed SNR based tuned PI controller for current control loop is applied for BLDC drive system shown in Fig. 3 and compared with optimized PI controller using PSO method. As, in the inner control loop the only varying parameter is R a
Thus, robustness of the proposed control strategy against different values of the armature winding resistance is checked. Simulations are carried out for R a
=50%, 75%, 100%, 125% and 150% of its nominal value. Step response of the current controllers using the SNR and PSO based designed controller with different R a is shown in Figs. 6-9. Also, Table 4 depicts the Overshoot (OS), settling time (T s
) and cost function (J current
) for step response of the current controllers obtained from SNR and PSO technique (EH. Bayoumi & HM. Soliman 2007) with different R a
. It can be seen that the performance of the SNR based tuned PI controller is quite prominent in comparison with the PSO based PI controller and the overshoots and settling time are significantly improved for the
BLDC system. Also, it is superior to the PSO approach.
B. Current controller
The proposed SNR based tuned PI controller for speed control loop is applied for BLDC drive system shown in Fig. 3 and compared with optimized PI controller using PSO method. It should be noted that the current response is much faster than the speed response. So, the value of the armature winding resistance (R a
) does not affect the performance of the velocity control loop. Thus, to illustrate robustness of the proposed control strategy R a is fixed at its nominal value and shaft moment of inertia, J, and the load torque constant, K t
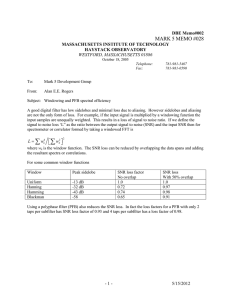
, is changed from nominal values for simulation study. Simulations are carried out for different operation conditions. Step response of the speed controllers using the SNR and PSO based designed controller under different values of J and K t
is shown in Figs. 10-11. Also, Table 5 depicts the Overshoot (OS), settling time (T s
) and cost function (J
Speed
) for step response of the speed controllers obtained from SNR and PSO technique under different values of J and K t
. It can be seen that the performance of the SNR based tuned speed controller is quite prominent in comparison with the
PSO based PI controller and the overshoots and settling time are significantly improved for the BLDC system. Also, it is superior to the PSO method.
104
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013
Figure 6. Step response of the current controllers obtained from SNR with different R a
Figure 7. Step response of the current controllers obtained from PSO with different R a
Figure 8. Step response of the current with R a
=50%,
Solid (SNR), Dashed (PSO)
Figure 9. Step response of the current with R a
=75%, Solid
(SNR), Dashed (PSO)
Table 4. Transient response parameters for step response of the current controllers
Operation points Method OS (%) T s
(sec) J
Current
SNR 0.019 0.0048 0.51
R a
=50%
PSO
SNR
0.030
0
0.0075
0.006
0.83
0.64
R a
=75%
PSO 0.030 0.005 0.58
SNR 0 0.0075 0.81
R a
=100%
PSO
SNR
0
0
0.0070
0.075
0.78
0.8
R a
=125%
PSO
SNR
0
0
0.079
0.010
0.98
0.28
R a
=150%
PSO 0 0.015 0.35
J=100% and Kt=50%
1
0.8
0.6
0.4
0.2
0
0
J=100% and Kt=200%
J=100% and Kt=50%
J=500% and Kt=50%
J=500% and Kt=200%
J=100% and Kt=200%
0.02
0.04
0.06
T ime(sec)
0.08
0.1
Figure 10. Step response of the speed controllers obtained from SNR with different J and K t
J=100% and Kt=50%
1
0.8
J=100% and Kt=200%
0.6
0.4
0.2
J=100% and Kt =50%
J=500% and Kt =50%
J=500% and Kt =200%
J=100% and Kt =200%
0
0 0.02
0.04
0.06
0.08
T ime(sec)
0.1
Figure 11. Step response of the speed controllers obtained from PSO with different J and K t
105
Intl. Res. J. Appl. Basic. Sci. Vol., 4 (1), 99-106, 2013
Table 5. Transient response parameters for Step response of the speed controllers
Operation points Method OS (%) T s
(sec) J
Current
SNR 0.006 0.016 0.012
J=100% & Kt=50%
PSO 0.007 0.018 0.23
SNR 0 0.08 0.056
J=100% & Kt=200%
PSO 0 0.095 0.085
J=500% & Kt=50%
SNR
PSO
SNR
J=500% & Kt=200%
0.0045
0.005
0.005
0.036
0.038
0.025
6.98
7.22
4.66
PSO 0.0065 0.022 5.88
CONCLUSION
This paper addresses a novel and effective optimization algorithm to inner and outer control loop design of
BLDC motor derive system using the SNR technique. The main feature of SNR is that it doesn’t require a wide solution space and the large number of searching and iterations were susceptible to related control parameters.
The proposed method combines the SNR algorithm with the new time-domain performance criterion for finding optimized parameters of PI gains for both current and speed control loop, independently. The optimization problem is carried out for a wide range of uncertain plant parameter changes. The results showed that the proposed approach is efficient to tune PI controllers for BLDC motor drive system. The effectiveness of the proposed speed and current controllers has been tested in comparison with PSO methods through the simulation studies and some performance indices. Results analysis shows that the proposed method can perform an efficacy search for the optimal tuning PID controller. Also, it led to an improvement of the system characteristic such as overshoot, settling time than the PSO method one.
REFERENCES
Awadallah MA, Bayoumi HE, Soliman HM. 2009. “Adaptive deadbeat controllers DC drives using PSO and ANFIS techniques” Journal of
Electrical Engineering, 60 (1): 3-11.
Bayoumi EH, Soliman HM. 2007. “PID/PI tuning for minimal overshoot of permanent-magnet brushless DC motor drive using particle swarm optimization,” Electromotion, 14(4): 198-208.
Cerruto E, Consoli A, Raciti A, Testa A. 1995. “A robust adaptive controller for PM motor drives in robotic applications,” IEEE Transactions on
Power Electronics, 10: 62-71.
Chau KT, Chan CC, Liu C. 2008. “Overview of permanent-magnet brushless drives for electric and hybrid electric vehicles,” IEEE Transactions on Power Systems, 55(6):2246-2257.
Chiasson J. 1998. “A new approach to dynamic feedback linearization control of an induction motor,” IEEE Transactions on Automatic Control,
43(3): 391-397.
Chiasson J. 2005. “Modeling and high-performance control of electric machines”, IEEE Press Series on Power Engineering, John Wiley.
Krishnan R. 2000, “Permanent magnet synchronous and brushless DC motor Drives: Theory, Operation, Performance, Modeling, Simulation,
Analysis, and Design Part 3, Virginia Technology, Blacksburg.
Lin CL, Jan HY, Shieh NC. 2003. “GA-based multiobjective PID control for a linear brushless DC motor,” IEEE/ASME Transactions on
Mechatronics, 8: 56-65.
Lin FJ, Shyu KK, Lin YS. 1999. “Variable structure adaptive control for PM synchronous servo motor drive,” IEE Proc. Elect. Power Applicat,
146:173-185.
Lin WM, Gow HJ, Tsai MT. 2011. “Combining of direct search and signal-to-noise ratio for economic dispatch optimization,” Energy Conversion and Management, 52: 487-493.
Nasri M, Nezamabadi-pour H, Maghfoori M. 2007. “A PSO-based optimum design of PID controller for a linear brushless DC motor,” Proc. of
World Academy of Science, Engineering and Technology, 20: 1307-6884.
Navidi N, Bavafa M, Hesami S. 2009. “A new approach for designing of PID controller for a linear brushless DC motor with using ant colony search algorithm”, Proc. of the IEEE conference.
Sathyan A, Lee YJ, Emadi A. 2009. “An FPGA-based novel digital PWM control scheme for BLDC motor drives,” IEEE Transactions on Power
Systems, 56(8): 3040-3049.
Shayeghi H, Dadashpour J. 2012. Anarchic society optimization based PID control of an automatic voltage regulator (AVR) system, Electrical and Electronic Engineering, 2: 199-207.
Shayeghi H, Shayanfar HA, Jalilzadeh S, Safari A. 2009. “A PSO based unified power flow controller for damping of power system oscillations”,
Energy Conversion and Management, 50: 2583-2592.
Tsay SC, Fong I, Kuo TSK. 1991. “Robust Linear Quadratic Optimal Control for Systems with Linear Uncertainties,” International Journal of
Control, 53 (1): 81-96.
Yong L, Zhub Z, Howe DQ. 2005. “Direct torque control of brushless DC drives with reduced torque ripple,” IEEE Transactions on Industry
Applications, 41 (2): 599-608.
106