L - Calclab
advertisement

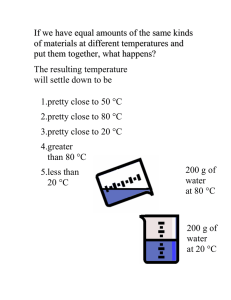
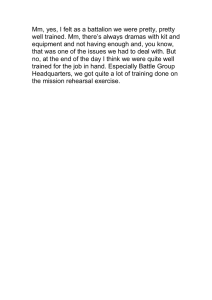
Spring 2004 Math 253/501–503 12 Multivariable Differential Calculus 12.3 Partial Derivatives c Tue, 03/Feb 2004, Art Belmonte NOTE Computer algebra systems have superb capabilities when it comes to partial derivatives. This includes the Symbolic Math Toolbox in MATLAB as well as the TI-89. The drudgery involved in computing derivatives by hand is avoided. Hand Examples Summary 746/2 With x = [x 1 , . . . , x n ], let u = f (x) be a real-valued function of n variables defined on a subset D of Rn . Let ek be the standard unit basis vector along the k th coordinate axis (as described in the §11.2 lecture). The partial derivative of u with respect to (w.r.t.) x k is f (x + hek ) − f (x) ∂u , = lim ∂ xk h h→0 provided this limit exists. Here we are holding all variables except x k constant and only allowing x k to vary. Hence we have a one variable limit of a real difference quotient, just like in Calc 1, only embedded in n-dimensional space. Let f (x, y) = p 1/2 4 − x 2 − 4y 2 = 4 − x 2 − 4y 2 . • Find the partial derivatives f x (1, 0) and f y (1, 0). • Interpret these numbers as slopes. • Illustrate with sketches. Solution • First compute the derivatives in general. −1/2 x f x = 12 4 − x 2 − 4y 2 (−2x) = − p 4 − x 2 − 4y 2 4y −1/2 f y = 12 4 − x 2 − 4y 2 (−8y) = − p 4 − x 2 − 4y 2 • practical partial differentiation: Differentiate w.r.t. the variable in question, treating all other variables as constants. • partial derivative notations: ∂u ∂f = u xk = Dk (u) = = f x k = Dk ( f ) ∂ xk ∂ xk 1 • Thus f x (1, 0) = − √ and f y (1, 0) = 0. The cross-sectional 3 planes y = 0 and x = 1 intersect the surface z = f (x, y) in curves. The slopes of the tangent lines of these curves at the specified point are the respective partial derivatives of f . • geometrical meaning of a partial derivative: Let’s illustrate with a function of two variables, z = f (x, y). The graph of f is a surface in x yz-space, a point on which is (a, b, f (a, b)). The vertical plane y = b intersects the surface in a space curve r(t) = [t, b, f (t, b)]. The partial derivative f x (a, b) is just the slope of this curve at x = a. See the revisitation of 746/2 in the MATLAB examples below where this is shown quite nicely via Cooper’s xslice and yslice commands. • See the corresponding MATLAB example for pictures illustrating these concepts. • higher order partial derivatives (HOPD): Provided that the relevant limits exist, higher order partial derivatives may be computed using the aforementioned practical partial differentiation method. 746/12 Let x y 2 z 3 + x 3 y 2 z = x + y + z. Compute • HOPD subscript notation: The order of differentiation corresponds to reading the subscripts left-to-right, as we read English. For example, to compute f xy , first differentiate f w.r.t. x, then differentiate the result w.r.t. y. ∂z ∂z and . ∂x ∂y Solution Implicitly differentiate like you did in Calc 1. (We’ll learn an easier hand technique for implicit differentiation in Section 12.4. Also see the corresponding MATLAB example that uses the fully automatic idiff command I wrote.) • HOPD squiggly-d notation: The order of differentiation corresponds to reading the subscripts right-to-left, as we read ∂2 f , the same Hebrew or Arabic. For example, to compute ∂y∂ x derivative as f xy , first differentiate f w.r.t. x, then differentiate the result w.r.t. y. • The equation implicitly defines z as a function of x and y. Partially implicitly differentiate said equation w.r.t. x. ∂z ∂z + z3 y2 + x 3 y2 + z 3x 2 y 2 xy 2 3z 2 ∂x ∂x ∂z 3xy 2 z 2 + x 3 y 2 − 1 ∂x ∂z ∂x • Clairaut’s Theorem: If f (x, y) is defined on a circular disk D containing (a, b) such that f xy and f yx are continuous on D, then f xy (a, b) = f yx (a, b). [In other words, the mixed partials are equal.] 1 ∂z ∂x = 1+ = 1 − y 2 z 3 − 3x 2 y 2 z = 1 − y 2 z 3 − 3x 2 y 2 z 3xy 2 z 2 + x 3 y 2 − 1 • Similarly, 1 − 2x yz 3 − 2x 3 yz ∂z = . ∂y 3x y 2 z 2 + x 3 y 2 − 1 746/43 Let u = 746/16 n X !1/2 x k2 . Compute first partial derivatives. k=1 Let u = x 2 y 3 t 4 . Compute u x , u y , and u t . Solution ∂u = We have ∂x j Solution We have u x = 2x y 3 t 4 , u y = 3x 2 y 2 t 4 , and u t = 4x 2 y 3 t 3 . 1 2 n X !−1/2 x k2 k=1 xj 2x j = v . uX u n 2 t x k k=1 746/20 746/44 Let f (x, y) = ln x 2 + y 2 . Compute first partial derivatives. Let u = sin ! kx k . Compute first partial derivatives. k=1 Solution We have n X 1 2y 2x ∂f ∂f = 2 = 2 (2x) = 2 and . 2 2 ∂x ∂y x +y x +y x + y2 Solution ! n X ∂u = j cos kx k . We have ∂x j 746/27 k=1 Let g(x, y) = y tan x 2 y 3 . Compute first partial derivatives. MATLAB Examples Solution s746x02 [746/2 revisited] We have g x = y sec2 x 2 y 3 · 2x y 3 = 2x y 4 sec2 x 2 y 3 and Let f (x, y) = gy y sec2 x 2 y 3 · 3x 2 y 2 + tan x 2 y 3 3x 2 y 3 sec2 x 2 y 3 + tan x 2 y 3 . = = p 1/2 4 − x 2 − 4y 2 = 4 − x 2 − 4y 2 . • Find the partial derivatives f x (1, 0) and f y (1, 0) • Interpret these numbers as slopes. • Illustrate with sketches. 746/32 Z x Let f (x, y) = y Solution et dt. Compute first partial derivatives. t 1 • We have f x (1, 0) = − √ and f y (1, 0) = 0. 3 Solution % % Stewart 746/2 % syms x y f = sqrt(4 - xˆ2 -4*yˆ2); pretty(f) • Treating y as a constant, apply the Fundamental Theorem of ex Calculus to obtain f x = . x Z y t e d y. • Treating x as a constant, first write f (x, y) = − x t Now apply the Fundamental Theorem of Calculus to obtain ey fy = − . y 2 (4 - x 2 1/2 - 4 y ) f x = diff(f,x); f y = diff(f,y); % fx10 = subs(f x, [x y], sym([1 0])); pretty(fx10) 1/2 - 1/3 3 2 s746x12 [746/12 revisited] fy10 = subs(f y, [x y], sym([1 0])) fy10 = Let x y 2 z 3 + x 3 y 2 z = x + y + z. Compute 0 ∂z ∂z and . ∂x ∂y % echo off; diary off Solution • The cross-sectional planes y = 0 and x = 1 intersect the surface z = f (x, y) in curves. The slopes of the tangent lines Here z is an implicit function of x and y. Rewrite the equation as of these curves at the specified point are the respective partial x y 2 z 3 + x 3 y 2 z − (x + y + z) = 0; i.e., a left-hand side which we derivatives of f . understand to be set to zero. Now use the idiff command I wrote. • The pictures tell the story. (The lengthy code to produce these graphics is omitted.) % % % Stewart 746/12 % % syms x y z eq0 = x*yˆ2*zˆ3 - xˆ3*yˆ2*z - (x+y+z); pretty(eq0) Stewart 746/2: fy(1,0) = 0 Stewart 746/2: fx(1,0) = − 1 / 31/2 1.8 1.8 1.6 2 3 3 2 x y z - x y z - x - y - z z x = idiff(eq0, z, x); pretty(z x) 1.4 z z 1.6 1.4 1.2 1.2 1 0.5 2 3 2 2 -y z + 3 x y z + 1 ---------------------2 2 3 2 3 x y z - x y - 1 z y = idiff(eq0, z, y); pretty(z y) 1 1.5 0 y 1 −0.5 0.5 0.5 1 x −0.5 1.5 y 0 0.5 3 3 -2 x y z + 2 x y z + 1 -----------------------2 2 3 2 3 x y z - x y - 1 s746x08 Let z = x √ ∂z ∂z y and . y − √ . Compute ∂x ∂y x % echo off; diary off Solution s746x22 MATLAB’s diff command renders the needful. Let f (x, y) = x y . Compute first partial derivatives. % % Stewart 746/8 % syms x y z = x*sqrt(y) - y/sqrt(x); pretty(z) Solution 1/2 x y % % Stewart 746/22 % syms x y f = xˆy; pretty(f) y - ---1/2 x z x = diff(z,x); pretty(z x) y x y + 1/2 ---3/2 x f x = diff(f,x); pretty(f x) x 1 1/2 ---- - ---1/2 1/2 y x f y = diff(f,y); pretty(f y) 1/2 y y x y ---x z y = diff(z,y); pretty(z y) y x % % echo off; diary off echo off; diary off 3 log(x) s746x27 [746/27 revisited] s747x76 Let g(x, y) = y tan x 2 y 3 . Compute first partial derivatives. Determine whether each of the following functions is a solution of Laplace’s equation u x x + u yy = 0. Solution (a) u = x 2 + y 2 The results returned by MATLAB are trigonometrically equivalent to those obtained by hand. (b) u = x 2 − y 2 (c) u = x 3 + 3x y 2 p (d) u = ln x 2 + y 2 % % Stewart 746/27 % syms x y g = y * tan(xˆ2 * yˆ3); pretty(g) (e) u = sin x cosh y + cos x sinh y 2 y tan(x (f) u = e−x cos y − e−y cos x 3 y ) g x = diff(g,x); pretty(g x) 4 2 y g y = diff(g,y); pretty(g y) 2 tan(x 2 (1 + tan(x 3 2 y ) ) x Solution We see that (b), (d), (e), (f) are solutions; (a) and (c) are not. 3 3 2 3 2 2 y ) + 3 y (1 + tan(x y ) ) x % % % Stewart 747/76 % syms x y a = xˆ2 +yˆ2; b = xˆ2 - yˆ2; c = xˆ3 + 3*x*yˆ2; d = log(sqrt(xˆ2 + yˆ2)); e = sin(x)*cosh(y) + cos(x)*sinh(y); f = exp(-x)*cos(y) - exp(-y)*cos(x); % G = [a b c d e f]; L = sym(zeros(1,6)); for k = 1:6 u = G(k); L(k) = simple(diff(u,x,2) + diff(u,y,2)); echo off end; echo on L echo off; diary off s747x60 Let z = cos2 (5x + 2y). Find all second partial derivatives. Solution Just use diff repeatedly. Notice that the mixed partials z xy and z yx are equal, a corroboration of Clairaut’s Theorem. % % Stewart 747/60 % syms x y z = cos(5*x + 2*y)ˆ2; pretty(z) L = [ 4, 0, 12*x, 0, 0, 0] % 2 echo off; diary off cos(5 x + 2 y) z x = diff(z,x); pretty(z x) -10 cos(5 x + 2 y) sin(5 x + 2 y) z y = diff(z,y); pretty(z y) s747x78 -4 cos(5 x + 2 y) sin(5 x + 2 y) % z xx = diff(z x, x); pretty(z xx) Determine whether each of the following functions is a solution of the wave equation u tt = a 2 u x x . 2 2 - 50 cos(5 x + 2 y) 2 2 - 20 cos(5 x + 2 y) 50 sin(5 x + 2 y) z xy = diff(z x, y); pretty(z xy) 20 sin(5 x + 2 y) z yx = diff(z y, x); pretty(z yx) 2 20 sin(5 x + 2 y) z yy = diff(z y, y); pretty(z yy) (c) u = (x − at)6 + (x − at)6 (d) u = sin(x − at) + ln(x + at) 2 - 20 cos(5 x + 2 y) 2 8 sin(5 x + 2 y) (a) u = sin(kx) sin(akt) (b) u = t/ a 2 t 2 − x 2 2 Solution - 8 cos(5 x + 2 y) % We see that all four functions are solutions. echo off; diary off 4 Solution Stewart 12.3 / Example A 1 −1 −1.6 .8 −1.4 −1.2 −1 −0.8 0 − .6 .4 0 − −0.2 .6 −0 .4 −0 0.8 0 .2 −0 y 0.6 0.4 0 L = 0.4 0.2 0.2 0 .8 0 0.6 % % Stewart 747/78 % syms a k t x A = sin(k*x) * sin(a*k*t); B = t / (aˆ2*tˆ2 - xˆ2); C = (x - a*t)ˆ6 + (x + a*t)ˆ6; D = sin(x - a*t) + log(x + a*t); % G = [A B C D]; L = sym(zeros(1,4)); for k = 1:4 u = G(k); L(k) = simple(diff(u,t,2) - aˆ2*diff(u,x,2)); echo off end; echo on L 0 0 0.2 0.4 0.6 0.8 1 x [ 0, 0, 0, 0] % Solution echo off; diary off Use difference quotients to numerically estimate derivatives. s748x85 • We have 0.6 − 0.4 0.2 f (0.9, 0.2) − f (0.8, 0.2) ≈ = = 2. f x (0.8, 0.2) ≈ 0.9 − 0.8 0.1 0.1 The total resistance R produced by three conductors with resistances R1 , R2 , and R3 connected in a parallel electrical 1 1 1 1 ∂R circuit is given by the formula = + + . Find . R R1 R2 R3 ∂ R1 • Similarly, f y (0.8, 0.2) ≈ = −1.5. Solution Using idiff, we see that ∂ R/∂ R1 = R 2 /R12 . % % Stewart 748/85 % syms R R1 R2 R3 eq0 = 1/R - (1/R1 + 1/R2 + 1/R3); pretty(eq0) 1 1 1 1/R - ---- - ---- - ---R1 R2 R3 R R1 = idiff(eq0, R, R1); pretty(R R1) 2 R --2 R1 % echo off; diary off Example A A contour map is given for a function f . Use it to estimate the partial derivatives f x (0.8, 0.2) and f y (0.8, 0.2). 5 0.1 − 0.4 −0.3 f (0.8, 0.4) − f (0.8, 0.2) ≈ = 0.4 − 0.2 0.2 0.2