SPEED SENSORLESS PMSM MOTOR DRIVE SYSTEM BASED ON
advertisement

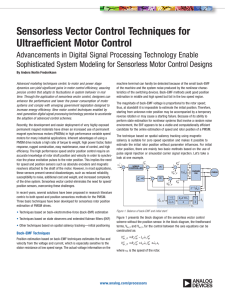
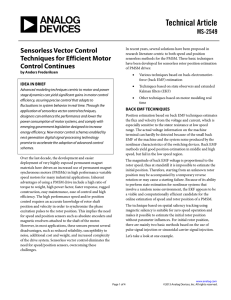
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 SPEED SENSORLESS PMSM MOTOR DRIVE SYSTEM BASED ON FOUR-SWITCH INVERTER Eisenhawer de M. Fernandes∗, Euzeli C. dos Santos Jr.†, Welflen R. N. Santos‡ ∗ Department of Mechanical Engineering Federal University of Campina Grande (UFCG) Aprı́gio Veloso Ave., 882, ZIP 58429-970 Campina Grande-PB, Brazil † Department of Electrical and Computer Engineering Indiana University - Purdue University Indianapolis (IUPUI) Indianapolis-IN, U.S.A. ‡ Department of Electrical Engineering Federal University of Piauı́ (UFPI) Petronio Portela Ave., ZIP 58109-970 Teresina-PI, Brazil Emails: eisenhawer@ee.ufcg.edu.br, eudossantos@iupui.edu, welflen@dee.ufpi.edu.br Abstract— This paper proposes a speed sensorless control for PMSM motor drive system. The sensorless strategy is based on back-emf estimation of the motor, suited for applications at high speed. The drive system uses a four-switches three-phase inverter. This topology is attractive specially in fault conditions in one leg of the conventional three-phase converter. The speed sensorless vector control based on the proposed converter provides a motor drive system with reduction of cost and volume. Relevant characteristics of the converter is presented, such as: voltage capability, capacitor currents, PWM modulation. Details of the vector control implemented is addressed. Simulation results are shown and validates the proposed system. The proposed method has been implemented in an industrial converter and preliminary experimental results are presented. Keywords— Sensorless control, vector control, permanent-magnet synchronous motor (PMSM), four-switch three-phase inverter. Resumo— Este artigo apresenta um método de controle sensorless de velocidade para motor sı́ncrono a ı́mã permanente (PMSM). A estratégia de controle sensorless implementada está baseada na estimação da fcem do motor, destinada a aplicações em alta velocidade. O acionamento do motor utiliza um conversor a quatro chaves. Esta topologia é interessante para condições de falha em um dos braços do conversor trifásico convencional. A estratégia de controle vetorial implementada sem sensor mecânico de posição utilizando o conversor a quatro chaves proporciona um sistema de acionamento com redução de custo e volume. São apresentadas as principais caracterı́sticas do conversor, tais como: tensão máxima do barramento CC, correntes dos capacitores e modulação PWM. Resultados de simulação são apresentados para validação da proposta. O sistema sensorless proposto foi implementado em laboratorio em um conversor industrial e resultados experimentais preliminares da proposta são apresentados. Keywords— Controle sensorless, controle vetorial, motor sı́ncrono a ı́mã permanente (PMSM), inversor trifásico com quatro chaves. 1 Introduction 2001),(Jang et al., 2003),(Andreescu et al., 2008). In this manner, scientific investigation has aimed at eliminating the position sensor and estimate rotor position from electrical quantities of the motor, using the motor itself as position sensor. These solutions are known in literature as sensorless or self-sensing control. Sensorless control methods can be classified in two categories: signal injection methods (Corley and Lorenz, 1998),(Jang et al., 2003),(Caruana et al., 2006),(Holtz, 2008),(Fernandes et al., 2013), and back-emf estimation methods. Signal injection methods are based on tracking of rotor magnetic saliency or anisotropy of the motor in the low speed region, exploiting the high-frequency model of the motor when an extra signal is applied. Second category estimates rotor position from the back-emf estimation based on the fundamental model of the motor. The performance of the es- Permanent-Magnet Synchronous Motors (PMSM) are widely used in industrial applications such as servo positioning systems, robots and printing machines and transportation such as electrical vehicles and hybrid vehicles. This type of machine provides a unique set of advantages and opportunities compared to induction machines. These advantages are compactness, higher efficiency, robustness, reliability (Pillay and Krishnan, 1991), (Consoli et al., 2001), (Bolognani et al., 2000a). PMSM motor drives require rotor position information which is provided by a rotor position sensor mounted in motor shaft (encoders or resolvers). The use of rotor position sensors represent drawbacks such as increasing cost, volume, necessity of mechanical adaptation and reduction of feasibility of drive system (Consoli et al., 1342 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 timators is dependent on the back-emf amplitude (Jang et al., 2003),(Ribeiro et al., 2006) therefore they are suited for applications at medium and high speed range. On the other hand, in most of applications, the PMSM motor is conventionally driven by the three-phase voltage source inverter. In literature, motor control research focused on cost-effective design has presented the four-switch inverter to drive AC motors (Jacobina et al., 2005),(Lin et al., 2008). In (Lin et al., 2008), it has been proposed the use of the four-switch three-phase inverter to drive BLDC motor with trapezoidal back-emf. Besides, this configuration has been adopted in fault-tolerant solutions when in openswitch fault occurs in the inverter (Bolognani et al., 2000b),(Wallmark et al., 2007). The objective of this paper is to propose the use a four-switch three-phase inverter in a speed sensorless system for PMSM motors. The configuration have been designed for applications where it is necessary to control two motors independently by using a standard three-leg inverter. Besides, it is possible to implement a sensorless strategy to drive the PMSM in order to increase the mechanical robustness of the overall system (Corley and Lorenz, 1998). In this work, it was applied a sensorless strategy based on the fundamental component voltage model of the machine (Chen et al., 2000),(Kim et al., 2002). The paper presents relevant characteristics of the converter, such as i) voltage capability, sharedleg and capacitor currents, ii) pulse-width modulation techniques based on scalar approaches; iii) control strategies for providing current control; and iv) simulation and experimental results. 2.1 Permanent-Magnet Synchronous Motor PMSM A three-phase permanent-magnet motor is composed by three windings in the stator and by a rotor where the magnet is placed. The model written in terms of dq variables in synchronous rotor reference frame describes the dynamic behavior of the machine given by (Pillay and Krishnan, 1991), (Corley and Lorenz, 1998): d r φ − ω r φrsq dt sd d rs irsq + φrsq + ω r φrsd dt lsd irsd + φpm lsq irsq P (irsq φpm + (lsd − lsq )irsd irsq ) r vsd = rs irsd + (1) r vsq = (2) φrsd φrsq = = = Te (3) (4) (5) r r where vsd and vsq are d,q-axis stator voltages, irsd r and isq , are the d, q-axis stator currents, φsd and φsq are the stator flux linkages. rs is the phase resistance, lsd and lsq are d, q-axis inductances. Te is the electromagnetic torque; ω r is the angular frequency of the rotor; φpm is the flux linkage due to the rotor magnets; and P is the number of pair of poles. 2.2 Four-switch three-phase inverter The configuration comprises four switches, a dcbus constituted by a capacitor bank with midpoint connection. The converter is composed by switches q1 , q 1 , q2 , q 2 . The switch-pairs q1 − q 1 , q2 − q 2 and q3 − q 3 are commanded complementary. 2.3 PWM Control The configuration proposed in this work is shown in Fig 1. In this topology both machines are connected to the dc-bus mid-point. The PMSM machine voltages (vs1 , vs2 , vs3 ) are given by: vs1 = Figura 1: Four-switch three-phase inverter supplying a PMSM motor. 2 1 2 v10 − v20 3 3 (6) 2 1 vs2 = − v10 + v20 3 3 (7) 1 vs3 = − (v10 + v20 ) 3 (8) Besides, the PWM relations obtained are given by: Proposed Configuration The proposed configuration is illustrated in Fig.1. This section addresses the model of the PMSM motor and the characteristics of the converter. 1343 ∗ ∗ ∗ v10 = vs1 − vs2 (9) ∗ ∗ ∗ v20 = vs2 − vs3 (10) Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 ∗ ∗ and v20 have been Once the pole voltage v10 determined (9)-(10), the pulse-widths τ 1 to τ 3 are calculated by using: Ts ∗ Ts + vj0 for j = 1 to 2. τj = 2 E can be written in manner that can be obtained the extended back-emf (Eex ): (11) s vsq These pulse-widths values are used to generate the gating signals for the switches by a programmable registers by comparing the modulation ∗ ∗ reference signal v10 and v20 with a high-frequency triangular carrier signal. 3 Where: Eex = ω r [(lsd − lsq )issd + φpm ] − (lsd − lsq ) The voltage limit can be determined by considering that all voltages are purely sinusoidal. In (12), it is written have the limit conditions associated with the proposed configuration. In (12), Vs is the voltage amplitude of the three-phase machine and E is the DC-link voltage, respectively. √ 3Vs (12) This topic will be better addressed in the final version of the paper. 4 Capacitor Currents The capacitors average currents ic1 and ic2 , over the sampling time Ts for the proposed configuration are given by: ic1 is3 = 2 ic2 = − is3 2 d s i (17) dt sq From (17) it can be seen that it includes the effects caused by rotor saliency (lsd − lsq ) and the contribution of flux linkage of the rotor’s magnets (ω r φpm ). The extended back-emf presents the rotor position information, thus, the rotor position can be estimated from the estimation of the back-emf. The back-emf can be estimated from the currents and voltages terminals measurements according to different methods in literature such as flux observers (Corley and Lorenz, 1998), state filters (Kim et al., 2002) and Kalman filters (Bolognani et al., 1999). In this work, it has been applied the structure presented in combined with a extended Luenberger observer (Corley and Lorenz, 1998),(Kim et al., 2002), illustrated in Fig.2. The transfer function obtained for estimated extended backemf and the extended back-emf from model (1)(5): Voltage Analysis E= d s )i − ω r (lsd − lsq )issq − Eex sin θr (15) dt sd d = (rs + )issq + ω r (lsd − lsq )issd + Eex cos θr (16) dt s vsd = (rs + b ex = E (13) Ro s + Rio Eex lsd s2 + (rs + Ro )s + Rio (18) (14) The capacitor average currents (13), (14) indicate the discharging of capacitor bank, i.e., the level of DC-bus voltage ripple. 5 Back-emf tracking method For PMSM sensorless operation at medium and high speeds it is required the use of estimation methods based on back-emf tracking. The information of the rotor position is extracted from back-emf estimation, thus, it is not necessary the application of extra signal. In this work, it has been implemented the method proposed by (Kim et al., 2002). The method employs two cascaded estimators, one for back-emf estimation and other for rotor position estimation. The back-emf estimator is a current statefilter implemented in the stationary reference frame (Fig. 2). The structure is based on the extended back-emf model proposed by (Chen et al., 2000). From the machine model (1)-(5), it Figura 2: State-filter for stationary current and back-emf estimation. The estimated back-emf presents the position information (θr ), the estimation error is applied to the input of the rotor position observer. The rotor position observer is composed by a heterodyning process, a controller(kio , kpo , kdo ) and the physical model of the motor. The rotor position observer is a Luenberger observer providing the estimated mechanical rotor speed (b ω rm ) and rotor position b (θrm ). The observer is illustrated in Fig. 3. 1344 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Figura 3: Rotor position observer based on backemf tracking. Figura 4: Control block diagram of the proposed drive system. The transfer function of the rotor position estimation can be written as: J b θr (s) = θr (s) ³b lsd −b lsq lsd −lsq ´ s3 + kdo s2 + kpo s + kio b 3 + kdo s2 + kpo s + kio Js 7 (19) The speed sensorless control system has been simulated in Matlab. The system has been evaluated for in sensorless manner using the four-switch three-phase inverter. The speed controller bandwidth has been set to 10 Hz. The current controller’s bandwidths has been set to 250 Hz. The switching frequency is 10 kHz. The sampling time of the variables is 100µs. The reference speed is set to 900rpm (60Hz).The DC-link voltage is 300V. The PMSM motor has the following rated parameters: rs = 0.67Ω,lsd = 22mH,lsq = 33mH,J = 0.084.10−3 kg.m2 ,Iphase = 2.0A,Vphase−phase = 200V,P = 400W, N = 3.000 rpm. The back-emf estimator gains (Rio ,Ro ) were determined from the characteristic polynomial of the back-emf estimator transfer function, in this case a 2nd order polynomial. Thus, the estimator gains has been chosen according the bandwidth necessary to estimate the back-emf. On the other hand, it has been adopted a 3rd order characteristic polynomial to the rotor position observer transfer function to define the observer gains (ki ,kp ,kd ). The speed reference is 900 rpm (60Hz). In Fig. 5 is shown the results for sensorless operation using rotor position observer based on backemf tracking. In Fig. 5 is shown rotor speed (ω r ), measured position (θr ), estimated position (b θr ) and phase currents. In Fig. 6 is shown rotor speed (ω r ), measured position (θr ), dq-axis stator currents (irsd , irsq ). During this test is applied a load torque equal to 30% of the rated torque. Based on the results, one can observe a small estimation error demonstrating a satisfactory performance of the rotor position estimator. The rotor position estimator has the property of zero lag estimation due to the reference torque feedforward input (Te∗ ). 6 Simulation results Sensorless control system The control block diagram of the proposed system is shown in Fig. 4. The control strategy of the system is composed by the speed control in cascade with torque and current control loops. The speed controller is a PI regulator type. The ’vector control’ block defines the reference currents of dqaxis. The reference current (irsq ) is obtained from the reference torque (Te∗ ) of the speed controller output. The d-axis reference current (irsd ) is set to be zero, thus, irsq defines the required torque. The stator currents are controlled by two PIcontrollers in the synchronous reference frame. r∗ r∗ The reference voltages vsd , vsq are transformed to ∗ ∗ ∗ . Based the reference phase voltages, vs1 , vs2 , vs3 on the phase reference voltages, the reference pole voltages are calculated according to (9)-(??). The phase currents are measured and transformed back to the synchronous reference frame. The current controller gains has been designed according the pole placement criteria. The controller gains cancels the machine poles. As a result, the controller gains are determined from the desired bandwidth of the closed-loop transfer function. The same procedure is applied to define the gains of the speed controller. The measured currents and the reference voltages are used as input of the back-emf estimator. The rotor position observer provides the rotor position used in the transformations between reference frames. Besides, the estimated rotor speed is used in the speed control loop replacing the mechanical transducer. 7.1 Experimental results In order to verify the performance of the proposed system, it was mounted a test setup in laboratory (Fig. 7). The experimental setup is composed by a microcomputer equipped by a DSP program- 1345 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 5 0 0.36 380 0.365 0.37 0.375 0.38 0.385 0.39 0.365 0.37 0.375 0.38 0.385 0.39 370 360 0.36 1 0 −1 0.3 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 0.39 Figura 5: Simulation results for sensorless control using four-switch three-phase inverter(top to bottom): measured position (θr ) and estimated position (b θr ), measured speed (ω r ) and estimated speed (b ω r ), phase currents is1 , is2 , is3 . Figura 7: Experimental setup: two three-phase servodrives, two three-phase PMSM motors and a SPIM machine. 380 375 370 365 360 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 1 0.5 0 0.3 Figura 8: Experimental results for sensorless control using standard three-phase inverter(top to bottom): measured position (θr ) and estimated position (b θr ), estimation error (θr − b θr ), is1 . Figura 6: Simulation results for sensorless control using four-switch three-phase inverter:(top to bottom): measured speed (ω r ) and estimated speed (b ω r ), dq-axis currents irsd , irsq . results will be addressed in the final version of the paper. ming board and two commercial PMSM servodrives. The servodrives consist of PWM VSI with 8kHz switching frequency and power modules with a dead-time of 1µs. The three-phase PMSM motor is driven by Converter 1 which is programmed with the desired control algorithm. On the other hand, Converter 2 and PMSM2 are used to emulate different load conditions to PMSM1. The control algorithm is programmed to the internal DSP of Converter 1 (Renesas SH7047). It performs closed loop speed and current control and generates the PWM relations (9)-(10). Bandwidths of the speed controller and current controllers are set to be 15 Hz and 120 Hz, respectively. The command signals are generated with a sampling time of 140µs. In Figs. 8-9 presents the experimental results for the speed control system based on sensorless control using conventional three-phase inverter. In Fig. 8 is shown the measured rotor position (θr ) and estimated rotor position (b θr ) and phase current (is1 ). In Fig. 9 is shown the measured and estimated speed for the same condition. The experimental results for the sensorless strategy based on the four-switch three-phase inverter are still ongoing. A complete set of experimental 8 Conclusions The paper presents a speed sensorless control system based on four-switch three-phase inverter. This topology is interesting specially in fault conditions in one-leg of the conventional three-phase converter. The speed sensorless vector control based on the proposed converter provides a motor drive system with reduction of cost, volume and increase the reliability of the overall drive system. The speed sensorless control is based on the back-emf tracking of the PMSM motor. The backemf is estimated from a current state-filter and applied to a Luenberger-style rotor position observer. The estimated rotor position and speed are used replacing the information provided by motion transducers. Then, the rotor position is extracted by using the motor itself. Details of structure and characteristics have been shown. The performance of sensorless control has been validated by simulations. Preliminary results of the control system in a test setup are shown. Experimental results for the proposed system are 1346 Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014 Corley, M. J. and Lorenz, R. (1998). Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds, IEEE Trans. on Industry Applications 34: 784–789. Fernandes, E. M., Oliveira, A. C., Lima, A. M. N., Jacobina, C. B. and Santos, W. R. N. (2013). A comparative evaluation of signal injection methods for pmsm self-sensing control, Proc. of COBEP 2013 pp. 821–827. Holtz, J. (2008). Acquisition of position error and magnet polarity for sensorless control of pm synchronous motors, IEEE Trans. on Industry Applications 44(4): 1172–1180. Figura 9: Experimental results for sensorless control using standard three-phase inverter(top to bottom): measured speed (ω r ) and estimated speed (b ω r ), is1 . Jacobina, C. B., dos Santos Jr., E. C., Correa, M. B. R. and da Silva, E. R. C. (2005). Ac motor drives with a standard number of switches and boost inductors, Proc. of IEEE Applied Power Electronics, APEC 2005 pp. 733–739. still ongoing. Referências Jang, J.-H., Ha, J.-I., Ohto, M., Ide, K. and Sul, S.-K. (2003). Analysis of permanent-magnet machine for sensorless control based on highfrequency signal injection, IEEE Trans. Industry Applications 39: 1595–2004. Andreescu, G., Pitic, C. I., Blaabjerg, F. and Boldea, I. (2008). Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of ipmsm drives, IEEE Transactions on Energy Conversion 23: 393–401. Kim, H., Harke, M. C. and Lorenz, R. D. (2002). Sensorless control of interior permanent magnet machine drives with zero-phase lag estimation, IEEE IAS Annual Meeting 2: 86–91. Bolognani, S., Oboe, R. and Zigliotto, M. (1999). Sensorless full-digital pmsm drive with ekf estimation of speed and rotor position, IEEE Trans. on Industrial Electronics . Lin, C.-T., Hung, C.-W. and Liu, C.-W. (2008). Position sensorless control for four-switch three-phase brushless dc motor drives, IEEE Trans. on Power Electronics 23. Bolognani, S., Zordan, M. and Zigliotto, M. (2000a). Experimental faul-tolerant control of pmsm drive, IEEE Trans. Ind. Electron. 47(5): 1134–1141. Pillay, P. and Krishnan, R. (1991). Application characteristics of permanent magnet synchronous and brushless dc motors for servo drives, IEEE Trans. on Industry Applications 27(5): 984–996. Bolognani, S., Zordan, M. and Zigliotto, M. (2000b). Experimental fault-tolerant control of a pmsm drive, IEEE Trans. on Industrial Electronics 47. Ribeiro, L. A., Harke, M. C. and Lorenz, R. D. (2006). Dynamic properties of back-emf based sensorless drives, Conf. Rec. IAS Annual Meeting, 2006 4: 2026–2033. Caruana, C., Asher, G. M. and Summer, M. (2006). Performance of hf signal injection techniques for zero-low-frequency vector control of induction machines under sensorless conditions, IEEE Trans. on Industrial Electronics 53(1): 225–238. Wallmark, O., Harnefors, L. and Carlson, O. (2007). Control algorithms for a faulttolerant pmsm drive, IEEE Trans. on Industrial Electronics 54. Chen, Z., Tomita, M., Ichikawa, S., Doki, S. and Okuma, S. (2000). Sensorless control of interior permanent magnet synchronous motor by estimation of an extended electromotive force, Proc. IEEE IAS Annual Meeting . Consoli, A., Scarcella, G. and Testa, A. (2001). Industry application of zero-speed sensorless control techniques for pm synchronous motors, IEEE Transactions on Industry Applications 37: 513–521. 1347