Process Control

Electronics - Physics 2011/12
Introduction to
Process Control
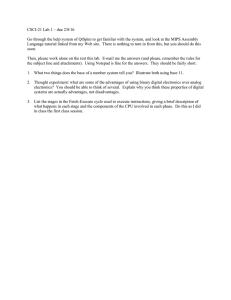
Typical Measurement System
Noise and Interference
Process
or
Test
Sensor or
Transducer
Amp
Signal
Conditioner
ADC
Converter
Process
OUR TOPIC IS HERE
… AND HERE
Controller
… and control over the process or experiment
Electronics - Physics 2011/12
PC comp and data storage
Process Control
Controlling a series of events to transform something (i.e. a physical property or a material) into a desired result (e.g. an electric signal or a product) is called process control .
The technological aspect of a scientific experiment (much the same as an industrial process) belongs to this category.
Scientific experiments were originally performed manually by operators. Their sensors were their senses of sight, feel, and sound, making the process totally operator dependent.
Think about Newton’s or Galilei’s experiments (actually Galilei used a simple device: a two lenses telescope).
Instrumentation and control slowly evolved over the years, as industry and experimental sciences found a need for better, more accurate, and more consistent measurements for tighter process control.
Process control can take two forms:
• sequential control , which is an event-based process in which one event follows another until a process sequence is complete
• continuous control , which requires continuous monitoring and
Sequential Process
Sequential control is an event-based process, in which the completion of one event follows the completion of another, until a process is complete, as recognized by the sensing devices.
1. Open valve A to fill tank A.
2. When tank A is full, a feedback signal from the level sensor tells the sequencer to turn valve A Off.
3. Open valve B to fill tank B.
4. When tank B is full, a feedback signal from the level sensor tells the sequencer to turn valve B Off.
5. When valves A and B are closed, valves C and D are opened to let measured quantities of liquids A and B into mixing tank C.
6. When tanks A and B are empty, valves C and D are turned Off.
7. After C and D are closed, start mixing motor, run for set period.
8. Turn Off mixing motor.
9. Open valve F to use mixture.
10.The sequence can then be repeated after tank C is empty and Valve F is turned Off.
Electronics - Physics 2011/12
Continuous Process Control
Continuous process control falls into two categories: (1) elementary On/Off action , and (2) continuous control action .
On/Off action is used in applications where the system has high inertia, which prevents the system from rapid cycling. This type of control only has only two states, On and Off; hence, its name.
HVAC (heating, ventilation, and air conditioning) is an example of this type of application. Such applications do not require accurate instrumentation.
Continuous process action is used to continuously control a physical output parameter of a material. The parameter is measured with the instrumentation or sensor, and compared to a set value. Any deviation between the two causes an error signal to be generated, which is used to adjust an input parameter to allow the process to correct for the output change. very simple one a much sophisticated one
Automated control system
Electronics - Physics 2011/12
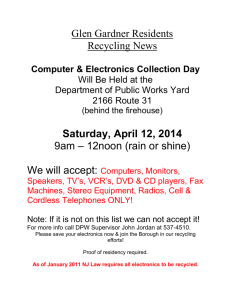
Continuous control for liquid mixing
PID controls
In continuous control (modulating control) action, the feedback controller determines the error between a set point and a measured variable .
The error signal is then used to produce an actuator control signal , which is used to control a process input variable e p
. The change in input variable will reduce the change in the measured output variable, reducing the error signal.
This type of control continuously monitors the measured variable, and has three modes of operation: proportional , integral , and derivative .
Electronics - Physics 2011/12
PID controls
The acronym PID stands for the three principal modes of the controller, each of which bears a mathematical relationship between the controlled variable e p
and the manipulated variable p driven by the controller output.
• Proportional mode relates changes in p to changes in e p
through a proportional gain.
• Integral mode moves the output at a rate related to the deviation of e p from its desired value, known as the set point of change of e p
.
p
I
(0) .
• Derivative mode moves the output in response to the time derivative or rate
Electronics - Physics 2011/12
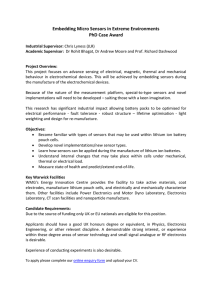
PID controls
Block schematic of a
PID electronic controller
Circuit of a PID action electronic controller using operational amplifiers
To give an approximate indication of the use of PID controllers for different types of loops, the following are general rules:
• Pressure control requires P and I, but D is not normally required.
• Level control uses P and sometimes I, but D is not normally required.
• Flow control requires P and I, but D is not normally required.
• Temperature control uses P, I, and D, usually with I set for a long time period.
Electronics - Physics 2011/12
Electronics - Physics 2011/12
Transducers
Transducers
Sensors
• Performance
• Type: Temperature, Light, Force, Motion,
Displacement, Sound
• Interfacing
Actuators
• Type: Heat, Light, Force, Displacement,
Motion, Sound
• Interfacing
Electronics - Physics 2011/12
Introduction
• To implement the scientific method it is necessary to carry out measurements
• To carry out measurements, systems must interact with their environment
• To do this they use sensors and actuators
• Sensors and actuators are examples of transducers
• A transducer is a device that converts one physical quantity into another
– examples include:
a mercury-in-glass thermometer (converts temperature into displacement of a column of mercury)
a microphone (converts sound into an electrical signal)
a speaker (converts an electrical signal into sound).
• We will first look at sensors and then at actuators
Electronics - Physics 2011/12
Sensors
• Almost any physical property of a material that changes in response to some excitation can be used to produce a sensor
– widely used sensors include those that are:
• resistive
• inductive
• capacitive
• piezoelectric
• photoresistive
• elastic
• thermal
Electronics - Physics 2011/12
Sensor Performance (1)
• Range
– maximum and minimum values that can be measured
• Resolution or discrimination
– smallest discernible change in the measured value
• Error
– difference between the measured and actual values
• random errors
• systematic errors
• Accuracy, inaccuracy, uncertainty
– accuracy is a measure of the maximum expected error
Electronics - Physics 2011/12
Sensor Performance (2)
• Precision
– a measure of the lack of random errors (scatter)
Electronics - Physics 2011/12
Sensor Performance (3)
• Linearity
– maximum deviation from a ‘straight-line’ response
– normally expressed as a percentage of the fullscale value
• Sensitivity
– a measure of the change produced at the output for a given change in the quantity being measured
Electronics - Physics 2011/12
Temperature sensors
The methods of measuring temperature can be categorized as follows:
– Expansion of materials;
– Electrical resistance change;
– Thermistors;
– Thermocouples;
– Pyrometers;
– Semiconductors.
Thermometer is often used as a general term for devices for measuring temperature.
Electronics - Physics 2011/12
Temperature sensors (1)
Liquid in glass thermometers using mercury were, by far, the most common direct visual reading thermometer (if not the only one).
– Mercury also has the advantage of not wetting the glass; that is, the mercury cleanly traverses the glass tube without breaking into globules or coating the tube.
– The operating range of the mercury thermometer is from (−35° to +450°C).
The freezing point of mercury is −38°C).
Linear thermal expansion
L fin
= L in
[1 + a (T fin
− T in
)]
Electronics - Physics 2011/12
Temperature sensors (2)
A bimetallic strip is relatively inaccurate, rugged, slow response and has hysteresis.
– The device is low cost, used extensively in On/Off applications.
– These devices operate on the principle that metals are pliable, and different metals have different coefficients of expansion: if two strips of dissimilar metals are joined together along their length, then they will flex to form an arc as the temperature changes.
L
Linear thermal expansion fin
= L in
[1 + a (T fin
− T in
)]
(a) Effect of temperature change on a bimetallic strip
(b) Bimetallic thermometer using a helical bimetallic coil.
Electronics - Physics 2011/12
Temperature sensors (3)
• Resistive thermometers
– typical devices use platinum wire (such a device is called a platinum resistance thermometers or PRT)
– linear but has poor sensitivity typical PRT element sheathed PRT
R fin
= R in
[1 + Coeff. (T fin
− T in
)]
Electronics - Physics 2011/12
Temperature sensors (4)
• Thermistors
– use materials with a high thermal coefficient of resistance
– sensitive but highly non-linear typical disc thermistor threaded thermistor
Thermistors are a class of metal oxide
(semiconductor material) that typically has a high negative temperature coefficient of resistance.
Thermistor materials have a temperature coefficient of resistance given by:
Electronics - Physics 2011/12
Temperature sensors (5)
• pn junctions
– a semiconductor device with the properties of a diode (we will consider semiconductors and diodes later)
– inexpensive, linear and easy to use
– limited temperature range (perhaps
-50 C to 150 C) due to nature of semiconductor material pn -junction sensor
Electronics - Physics 2011/12
Temperature sensors (6)
Thermocouples (T/C) are formed when two dissimilar metals are joined together to form a junction.
As a result of the difference in electromotive force developed at the two junctions due to their temperature difference, a current flows and a voltage difference between the two junctions is measured.
The Seebeck effect states that the voltage produced in a thermocouple is proportional to the temperature between the two junctions.
Electronics - Physics 2011/12
Light Sensors (1)
Photovoltaic
– light falling on a pn-junction can be used to generate electricity from light energy (as in a solar cell)
– small devices used as sensors are called photodiodes
– fast acting, but the voltage produced is not linearly related to light intensity
The negative sign of I op
(photocurrent) is opposite to the positive forward diode current
A typical photodiode
Electronics - Physics 2011/12
Light Sensors (2)
Photoconductive
• such devices do not produce electricity, but simply change their resistance
• photodiode can be used in this way to produce a linear device
• phototransistors act like photodiodes but with greater sensitivity
• light-dependent resistors (LDRs) are slow, but respond like the human eye
A practical light meter requires a means of sensing the photocurrent, without perturbing it.
In a current-voltage converter
(op-amp) the output voltage is proportional to the photocurrent and hence to the illumination
Electronics - Physics 2011/12
Guarantees diode reverse polarization
A light-dependent resistor (LDR)
Force Sensors
• Strain gauge
– stretching in one direction increases the resistance of the device, while stretching in the other direction has little effect
– can be bonded to a surface to measure strain
– used within load cells and pressure sensors
Direction of sensitivity
Electronics - Physics 2011/12
A strain gauge
Strain gauges
Strain gauges are resistive sensors, which can be deposited resistors or piezo-electric resistors.
The resistive conducting path in the deposited gauge is copper or nickel particles deposited onto a flexible substrate in a serpentine form.
Bending the substrate results in compressive (or tensile) stress forcing the particles together (or apart) and the resistance decreases (or increases).
Electrical resistance is related to the applied force (piezoresistive effect) through the gauge factor S e dR/R = S
of the conductor: e e R=R
0
(1+x) with x= S e e
Alternative use of a strain gauge for measuring the force applied to a cantilever beam.
Electronics - Physics 2011/12
Strain gauge: (a) as a serpentine structure, and (b) as a load sensor.
Tactile Sensors
A simple tactile sensor producing an “on–off” output can be formed with two leaves of foil and a spacer (membrane switch).
An active ultrasonic coupling touch sensor with the piezoelectric films
When compressing force F is applied to the upper film, mechanical coupling between the three-layer assembly changes.
This affects the amplitude and the phase of the received signal.
These changes are recognized by the demodulator and appear at its output as a variable voltage.
Electronics - Physics 2011/12
Displacement Sensors (1)
• Potentiometers
– resistive potentiometers are one of the most widely used forms of position sensor
– can be angular or linear
– consists of a length of resistive material with a sliding contact onto the resistive track
– when used as a position transducer a potential is placed across the two end terminals, the voltage on the sliding contact is then proportional to its position
– an inexpensive and easy to use sensor
Electronics - Physics 2011/12
Displacement Sensors (2)
• Inductive proximity sensors
– coil inductance is greatly affected by the presence of ferromagnetic materials
– here the proximity of a ferromagnetic plate is determined by measuring the inductance of a coil
Inductive proximity sensors
Electronics - Physics 2011/12
Displacement Sensors (3)
• Switches
– simplest form of digital displacement sensor
• many forms: lever or push-rod operated microswitches; float switches; pressure switches; etc.
A limit switch
Electronics - Physics 2011/12
A float switch
Displacement Sensors
• Opto-switches
– consist of a light source and a light sensor within a single unit
• 2 common forms are the reflective and slotted types
A reflective opto-switch A slotted opto-switch
Electronics - Physics 2011/12
Encoders (1)
• Absolute position encoders
– a pattern of light and dark strips is printed on to a strip and is detected by a sensor that moves along it
• the pattern takes the form of a series of lines as shown below
• it is arranged so that the combination is unique at each point
• sensor is an array of photodiodes
Electronics - Physics 2011/12
Encoders (2)
• Incremental position encoder
– uses a single line that alternates black/white
• two slightly offset sensors produce outputs as shown below
• detects motion in either direction, pulses are counted to determine absolute position (which must be initially reset)
Electronics - Physics 2011/12
Counting devices
• Other counting techniques
– several methods use counting to determine position
• two examples are given below
Electronics - Physics 2011/12
Inductive sensor Opto-switch sensor
Motion Sensors
• Motion sensors measure quantities such as velocity and acceleration
– can be obtained by differentiating displacement
– differentiation tends to amplify high-frequency noise
• Alternatively can be measured directly
– some sensors give velocity directly
• e.g. measuring frequency of pulses in the counting techniques described earlier gives speed rather than position
– some sensors give acceleration directly
• e.g. accelerometers usually measure the force on a mass
Electronics - Physics 2011/12
Sound Sensors
• Microphones
– a number of forms are available
• e.g. carbon (resistive), capacitive, piezoelectric and moving-coil microphones
• moving-coil devices use a magnet and a coil attached to a diaphragm – we will discuss electromagnetism later
Electronics - Physics 2011/12
Sensor Interfacing
• Resistive devices : can be very simple
e.g. in a potentiometer, with a fixed voltage across the outer terminals, the voltage on the third is directly related to position;
where the resistance of the device changes with the quantity being measured, this change can be converted into a voltage signal using a potential divider – as shown;
the output of this arrangement is not linearly related to the change in resistance.
Electronics - Physics 2011/12
Switches
• Switches
– switch interfacing is also simple
• can use a single resistor as below to produce a voltage output
• all mechanical switches suffer from switch bounce
Electronics - Physics 2011/12
Other sensors
• Capacitive and inductive sensors
– sensors that change their capacitance or inductance in response to external influences normally require the use of alternating current
(AC) circuitry
– such circuits need not be complicated
– we will consider AC circuits in later lectures
Electronics - Physics 2011/12
Key Points
• A wide range of sensors is available
• Some sensors produce an output voltage related to the measured quantity and therefore supply power
• Other devices simply change their physical properties
• Some sensors produce an output that is linearly related to the quantity being measured, others do not
• Interfacing may be required to produce signals in the correct form
Electronics - Physics 2011/12
Actuators
• Introduction
• Heat Actuators
• Light Actuators
• Force, Displacement and Motion Actuators
• Sound Actuators
• Actuator Interfacing
Electronics - Physics 2011/12
Introduction
• In order to be useful an electrical or electronic system must be able to affect its external environment. This is done through the use of one of more actuators
• As with sensors, actuators are a form of transducer which convert one physical quantity into another
• Here we are interested in actuators that take electrical signals from our system and from them vary some external physical quantity
Electronics - Physics 2011/12
Heat Actuators
• Most heat actuators are simple resistive heaters
• For applications requiring a few watts ordinary resistors of an appropriate power rating can be used
• For higher power applications there are a range of heating cables and heating elements available
Electronics - Physics 2011/12
Light Actuators
• For general illumination it is normal to use conventional incandescent light bulbs or fluorescent lamps
– power ratings range from a fraction of a watt to perhaps hundreds of watts
– easy to use but relatively slow in operation
– unsuitable for signalling and communication applications
Electronics - Physics 2011/12
LEDs
• Light-emitting diodes (LEDs)
– produce light when electricity is passed though them
– a range of semiconductor materials can be used to produce light of different colours
– can be used individually or in multiple-segment devices such as the seven-segment display shown here
LED seven-segment displays
Electronics - Physics 2011/12
LCDs
• Liquid crystal displays
– consist of 2 sheets of polarised glass with a thin layer of oily liquid sandwiched between them
– an electric field rotates the polarization of the liquid making it opaque
– can be formed into multi- element displays (such as 7-segment displays)
– can also be formed into a matrix display to display any character or image
A custom LCD display
Electronics - Physics 2011/12
Optical fibers
• Fibre-optic communication
– used for long-distance communication
– removes the effects of ambient light
– fibre-optic cables can be made of:
• optical polymer
– inexpensive and robust
– high attenuation, therefore short range (up to about 20 metres)
• glass
– much lower attenuation allowing use up to hundreds of kilometres
– more expensive than polymer fibres
– light source would often be a laser diode
Electronics - Physics 2011/12
Force, Displacement & Motion
Actuators
• Solenoids
– basically a coil and a ferromagnetic ‘slug’
– when energised the slug is attracted into the coil
– force is proportional to current
– can produce a force, a displacement or motion
– can be linear or angular
– often used in an
ON/OFF mode
Small linear solenoids
Electronics - Physics 2011/12
Analog displays
• Meters
– moving-iron
• effectively a rotary solenoid + spring
• can measure DC or AC
– moving-coil
• most common form
• deflection proportional to average value of current
• f.s.d. typically 50 A – 1 mA
• use in voltmeters and ammeters is discussed later
Moving-coil meters
Electronics - Physics 2011/12
Movement actuators
• Motors
– three broad classes
• AC motors
– primarily used in high-power applications
• DC motors
– used in precision position-control applications
• Stepper motors
– a digital actuator used in position control applications
Electronics - Physics 2011/12
Stepper motors
• Stepper motors
– a central rotor surrounded by a number of coils (or windings)
– opposite pairs of coils are energised in turn
– this ‘drags’ the rotor round one ‘step’ at a time
– speed proportional to frequency
– typical motor might require
48-200 steps per revolution
Electronics - Physics 2011/12
Stepper motor
Stepper-motor current waveforms
Electronics - Physics 2011/12
A typical stepper-motor
Sound Actuators
• Speakers
– usually use a permanent magnet and a movable coil connected to a diaphragm
– input signals produce current in the coil causing it to move with respect to the magnet
• Ultrasonic transducers
– at high frequencies speakers are often replaced by piezoelectric actuators
– operate over a narrow frequency range
Electronics - Physics 2011/12
Actuator Interfacing
• Resistive devices
– interfacing involves controlling the power in the device
– in a resistive actuator, power is related to the voltage
– for high-power devices the problem is in delivering sufficient power to drive the actuator
– high-power electronic circuits will be considered later
– high-power actuators are often controlled in an
ON/OFF manner
– these techniques use electrically operated switches
Electronics - Physics 2011/12
Other actuators
• Capacitive and inductive devices
– many actuators are capacitive or inductive (such as motors and solenoids)
– these create particular problems – particularly when using switching techniques
Electronics - Physics 2011/12
Key Points
• Systems affect their environment using actuators
• Most actuators take power from their inputs in order to deliver power at their outputs
• Some devices consume only a fraction of a watt while others consume hundreds or perhaps thousands of watts
• In most cases the efficiency of the energy conversion is less than 100%, in many cases it is much less
• Some circuits resemble resistive loads while others have considerable capacitance or inductance.
• The ease or difficulty of driving actuators varies with their characteristics.
Electronics - Physics 2011/12