A Microscopic Simulator for Freeway Traffic | SpringerLink
advertisement

Networks and Spatial Economics, 2: (2002) 371–386
C 2002 Kluwer Academic Publishers, Manufactured in the Netherlands.
A Microscopic Simulator for Freeway Traffic
JOACHIM WAHLE, ROLAND CHROBOK, ANDREAS POTTMEIER AND MICHAEL SCHRECKENBERG
Physics of Transport and Traffic, Gerhard-Mercator-Universität Duisburg, Germany
email: wahle@traffgo.com
email: chrobok@traffic.uni-duisburg.de
email: pottmeier@traffic.uni-duisburg.de
email: schreckenberg@traffic.uni-duisburg.de
Abstract
In this contribution a micro-simulator for freeway traffic which is coupled to a stream of on-line data stemming
from inductive loops is presented. In order to provide network-wide information about the current traffic state a
cellular automaton traffic flow model is combined with the measured data. The framework is applied to the freeway
network of North Rhine-Westphalia (NRW), where data from about 3,500 inductive loops are provided on-line
minute by minute. Special attention is paid to the technical aspects of the simulation like the network structure.
Results are presented and discussed.
Keywords: cellular automata, on-line simulation, traffic
1.
Introduction
Due to the increasing computational power, in recent years a lot of microscopic traffic
simulators have been developed ( Helbing et al., 2000; Schreckenberg and Wolf, 1998; Brilon
et al., 1999; Ceder, 1999; Schnieder and Becker, 2000). They offer a powerful tool for system
analysis and design, e.g., optimization of traffic light management (e.g., HUTSIM (Kosonen,
1996)), verification of advanced traffic management systems (e.g., MITSIM (Yang and
Koutsopoulos, 1996), AIMSUN2 (Barceló et al., 1999)), validation of the effectiveness of
vehicle systems, like automatic cruise control (e.g., PELOPS (Wallentowitz et al., 1999)),
or as a part of a transportation planning tools (e.g., TRANSIMS (Nagel et al., 2000)).1
The main advantage of a microscopic simulation is that the infrastructure is incorporated
directly and the motorist is described on an individual level. On the one hand this is closer
to reality than macro- or mesoscopic approaches. On the other hand the input data needs
to be also on the micro level. However, there is a broad agreement that micro-simulators
provide very convincing results.
In this paper, we focus on a simulator for freeway traffic which is coupled on-line to
a stream of data stemming from inductive loops. The idea is to use the measured data as
input for traffic flow simulations to provide the current traffic state of a large network. Thus,
performance is a basic requirement for the simulator.
The remainder of the paper is organised as follows: In the next section the principle of
on-line simulations will be described. It is based on the combination of a traffic flow model,
discussed in Section 3, with a digital network and traffic data (Section 4). In Section 5
372
WAHLE ET AL.
simulation techniques are discussed in detail. In the following section, we present first
results of the simulation and discuss the question of validating these. We close with a
summary.
2.
Concept of on-line simulations
One major goal of intelligent transportation systems (ITS) is to provide information to the
road user in order to help him to navigate through the network easier (Adler and Blue, 1998;
ITS International, 1999). Additionally, the objective is to distribute the vehicles over the
network more efficiently. The starting point for such systems should be information about
the current traffic state in the whole network.
Unfortunately, in most freeway networks data are only available from special points,
for instance at Variable Message Signs (VMS), ramps or ramp-meters. Here, the detection
devices are installed to gather data in order to optimize the local facilities. Of course such
sources are distributed inhomogeneously and they do not cover the whole network (see
figure 8).
Our approach to provide network-wide information is to use the local data as input to
a micro-simulator. The local traffic counts are combined with the network structure, e.g.,
type of roads, priority regulations at the nodes or on- and off-ramps, under consideration
of realistic traffic flow dynamics. This is the basic idea of on-line simulations: Local traffic
counts serve as input for traffic flow simulations to provide network-wide information. Thus,
information can be derived for those regions which are not covered by measurements.
In figure 1 the concept of the on-line simulation is sketched. The on-line data are the
input to the controller, which performs simulations on a digitised road network. The basis
of this road network is a Geographical Information System (GIS). The model used allows
high-speed micro-simulations and it is even possible to perform a short-term traffic forecast
(Chrobok et al., 2000). The output of the simulation is dynamic data like link travel times,
which serve as input for intelligent systems, e.g., Dynamic Route Guidance Systems (ITS
International, 1999; Wahle et al., 2001).
On−line Data
Network
Traffic
lights
Visualisation
Controller
Forecast
Simulator
Figure 1. Concept of the on-line simulation. On-line data serve as input to the controller, which handles the static
information about the topology. These data are given to the simulator which provides network-wide dynamic data.
The results are processed to visualize the current traffic state or to make traffic forecast.
373
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
3.
Cellular automaton model
Since the simulator is based on on-line data the model employed should be effective. Due to
their design cellular automaton models are very efficient in large-scale network simulations
(Nagel et al., 2000; Esser and Schreckenberg, 1997; Kaumann et al., 2000; Nagel, 1996;
Rickert and Wagner, 1996; Schreckenberg et al., 2001). Nevertheless, it should be pointed
out that the dynamics of urban and freeway traffic set different requirements for a model.
Urban traffic is mainly governed by the dynamics of the traffic lights, whereas in freeway
traffic the dynamics is based on the interaction between the vehicles. As recent investigations
show, dynamic phases emerge in freeway traffic, e.g., synchronised traffic flow or stop and
go traffic (Kerner, 1999, 2000; Neubert et al., 1999). Therefore, models which are used for
the simulation of freeway traffic should reproduce these dynamics since this is crucial for
reliable results (Knospe et al., 2000).
Since the models which reproduce the dynamic phases are still under debate the original
cellular automaton by Nagel and Schreckenberg (1992) is used in a first version of this
simulator. However, this model represents a minimal model in the sense that it is capable to
reproduce basic features of real traffic, like spontaneous jam formation, i.e., phantom jams,
but further simplification leads to the loss of this property. So far it has been studied in great
detail (for an overview see Chowdhury et al. (2000) and references therein).
3.1.
Single-lane traffic
For completeness, the definition of the model is briefly reviewed. The road is subdivided in
cells with a length of x = 7.5 m/veh (figure 2). Each cell is either empty or occupied by
only one vehicle with an integer speed vi ∈ {0, . . . , vmax }, with vmax denoting the maximum
speed. The motion of the vehicles is described by the following rules which are applied
simultaneously to each vehicle ( parallel dynamics):
R1
R2
R3
R4
Acceleration: vi ← min(vi + 1, vmax ),
Deceleration to avoid accidents: vi ← min(vi , gap),
Randomization: with a certain probability p do vi ← max(vi − 1, 0),
Movement: xi ← xi + vi .
The variable gap denotes the number of empty cells in front of the vehicle at cell i. A
time-step corresponds to t ≈ 1 sec, the typical time a driver needs to react.
gaps=1
cell length 7.5m
2
velocity
2
gap=2
Figure 2.
Part of a road in a cellular automaton model.
gapp=3
2
2
3
1
374
WAHLE ET AL.
The first two rules (R1, R2) describe a somehow optimal driving strategy, the driver
accelerates if the vehicle has not reached the maximum speed vmax and brakes to avoid
accidents, which are explicitly excluded. This can be summed up as follows: drive as fast
as you can and stop if you have to! However, drivers do not always react in this optimal
way: they overreact while decelerating or accelerate slower then they are able to. This and
the fluctuations of the velocity of vehicles in the free flow is reflected by the braking noise
p (R3). It is also responsible for spontaneous formation of jams, so-called phantom jams.
To take into account the differences between cars and trucks we introduce vehicles with
varying vmax , i.e., we assign lower maximum velocities to trucks than to cars.
3.2.
Lane change
Beside the interactions between cars on the same lane, it is important to describe more
complex situations, e.g., multi-lane traffic, merging regions, or even roadworks, i.e., the
blockage of a lane. Therefore, the set of fundamental rules has to be expanded.
3.2.1. Free lane change. In order to reproduce a realistic lane change safety aspects and
legal constrains which vary between different countries have to be taken into account as
well as the incentive of the driver (Nagel et al., 1998). A schematic lane change is shown
in figure 2. First, a vehicle checks if it is hindered by the predecessor on its own lane. This
is fulfilled if gap < v. Then it has to pay regard to the security criterium, i.e., the gap to
the successor gaps and to the predecessor gap p on the destination lane must allow a safe
change. Then the vehicle moves to the other lane. A systematic approach for two-lane rules
can be found in Nagel et al. (1998).
3.2.2. On- and off-ramps. On freeways the vehicles have to leave or enter the main-road
at off- respectively on-ramps. Thus, merging areas are used in this simulation to transfer
the cars between the different links.
In order to leave the freeway the driver has to prepare to change to the right lane—
on German freeways—before he can leave the freeway. Therefore, a preperation area is
declared upstream of the off-ramp. This area is followed by a absorption zone in which the
vehicles change to a transfer link respecting the security criterion. At the end of a transfer
link an insertion area is defined. The vehicles drive on, up to this area and change under
the condition that there is sufficient distance to the successor on the destination lane. If
hindered while changing they drive on to the end of the road and if necessary they wait.
3.2.3. Roadworks. Roadworks are realised by a blockage of one or more lanes of a multilane road. Upstream of the hindrance a preperation area is introduced in which the vehicles
can leave the blocked lane. Similar to on-ramps the vehicles have to wait at the obstacle if
the security criterium can not be fullfilled before reaching the blockage.
4.
Network structure
A crucial point in the design of every simulator is the representation of the road network. In this section the design of the network is described. Like in other simulators the
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
375
network consists of a few basic elements (e.g., Yang and Koutsopoulos, 1996; Esser and
Schreckenberg, 1997). In the following, these basic elements are introduced. The data used
for the network stems from the NW-SIB, a GIS system provided by the state of North
Rhine-Westphalia.
4.1.
Basic elements
In principle, the whole network consists of two basic elements: links and nodes.
4.1.1. Nodes. A node is either a connection between two links or a sink/source at the
boundary or an off/on-ramp. At the sources vehicles are added with regard to input data.
Note that vehicles are always added with maximum speed vmax . Sources are areas of a length
of vmax cells. On the sinks the cars are simply removed every time step.
4.1.2. Links. Links are directional elements that connect nodes. In other microscopic
simulators the basic objects are lanes and a link comprises one or more lanes (Yang and
Koutsopoulos, 1996). In this work, links are the basic entities. Their internal parameters are
number of lanes and maximum speed on the link. There are two kinds of links:
4.1.2.1. Multi-lane links. These links are the main parts of the network (figure 3). If they
do not lead to a boundary node they are connected with another multi-lane link. The length
of these links is often several kilometers. This is due to the way the network was constructed
since at every on- and off-ramp and every intersection a node was set. Opposite to urban
traffic, on freeways vehicles enter and leave the main roads using merging regions. Therefore, every multi-lane link has emission and absorption regions which are connected to the
transfer links. These regions can be found at the beginning and the end of the multi-lane links.
4.1.2.2. Transfer links. Compared to the multi-lane the transfer links are typically only
a few hundred meters long and mostly single lane (figure 4). They never lead directly to
another edge. In fact, they have to be endowed with an acceleration region at the beginning
and an emission region at the end, or a braking region at the beginning and an absorption
region at the end. Besides, further emission- or absorption regions can be placed on it.
Figure 3. A multi-lane link. Using an absorption or emission area, vehicles leave or enter a link. At the end of
the link vehicles move on to the next with respect to their velocity.
376
WAHLE ET AL.
Figure 4. Transfer link. At the beginning there is a region for braking or a source. At the end an area for
accelerating or a sink can be found. In between there are several areas for absorption or emission.
4.2.
Combined elements
With the elements above one is able to build all freeway networks. Now, we will explain
three combined elements:
• junctions,
• intersections, and
• triangular intersections.
Other geometries can rarely be found in reality. However, they can be constructed easily
with the elements used here.
4.2.1. Junctions. Junctions generally consist of two on- and two off-ramps. Vehicles enter
or leave the highway there. The off-ramps are transfer links which are connected with the
absorbing region of a multi-lane link. The transfer link has a braking region at the beginning
and a sink at the end. In a similar way on-ramps are built. They are transfer links with a
source at the beginning connected to an emission region on a multi-lane link.
4.2.2. Intersection. An intersection is a node in the network where two freeways meet.
Since they are very complex they comprise many transfer links. A special transfer link
employed is the so-called parallel-lane which is parallel to one freeway. It receives vehicles
going in both directions on the other freeway and distributes them among the transfer
links according to their directions. Furthermore, the parallel-lane receives vehicles of the
other freeway which have already made a turn. Thus, the processes on a parallel-lane are
very complex and each consists of one acceleration and one braking region as well as two
emission and two absorbing regions. In order to leave a freeway and turn left or right to the
other a vehicle has to use four different transfer links.
4.2.3. Triangular intersection. A triangular intersection is a node where two freeways
meet, but one of them ends or begins, respectively.
5.
Simulation technique
Up to now the basic concepts, i.e., the model and the network structure have been introduced. In the following, the guidance of the vehicles in the network, the algorithms used
to incorporate the measured data into the simulation and the data connection are described.
Finally, the overall procedure of the simulation is presented.
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
5.1.
377
Guidance of vehicles
In Section 3 the agent model of a motorist is introduced. The architecture of the model is
a two-layer structure and it is pointed out that the route choice information is processed in
the strategic layer. In principle, there are two different strategies to solve the route choice
problem. One can assign an origin and a destination to the road user and they are guided
through the network according to this route (Nagel et al., 2000; Rickert and Wagner, 1996).
For our network no origin-destination with a sufficient temporal and spatial resolution is
available. Therefore, the vehicles are guided in the network randomly, according to the daily
trend of the turn off percentages calculated on the basis of aggragated historical data. This
is a very simple implementation of the strategic layer, but it is sufficient.
5.2.
Tuning strategies
As already mentioned, the simulation is supplemented by on-line data. Therefore, algorithms
have to be found to incorporate the real world measurements into the simulation. This is
done at the so-called checkpoints, which are located at those places in the network where a
complete cross-section is available, i.e., all lanes are covered by an inductive loop (figure 5).
Here it is convenient to perform adjustments. In principle, the simulation results of the last
minute have to be compared with the measured data and adjustments have to be made.
First methods for this procedure were given in Esser and Schreckenberg (1997). However,
these suffer from a major drawback since they destroy the dynamic phases of the traffic
flow. Therefore, they are only sufficient for urban traffic, where the dynamics are governed
by intersections, mainly traffic lights, whereas on freeways dynamic phases can be found
(for an overview see Kerner (2000)).
Therefore, it is inevitable to incorporate the data into the simulation without perturbing
the dynamics present in the network. Therefore, we propose the Tuning of the mean gap. It
Figure 5. Checkpoint in the simulation: (a) situation before the tuning; (b) application of the mean gap strategy.
The mean gap g = 4 cells. Thus, two vehicles with the speed vin = 3 cells/time step are added.
378
WAHLE ET AL.
follows the idea to add vehicles “adiabatically”, i.e., without disturbing the system (Froese,
1998; Kaumann, 2000; Kaumann et al., 2000).
The driving force of the tuning strategy is the difference between simulated and real world
data. In general there are two possible situations: If there are too many vehicles, some are
removed. If the simulated number of vehicles simulated is lower than the measured number,
vehicles are added in an area up- and down-stream the check-point. In this area, the mean
gap g of the vehicles is calculated. From the real world data a speed vin in cells/time step
is determined. Now, the cars are added to the system with regard to the mean gap g and
their speed vin (figure 5).
Thus, the cars which are already on the track are not disturbed; in other words no car
has to brake due to the added ones. If it is not possible to add the required number some
vehicles are left out. Although this is not correct, it is more important to keep the dynamics
of the system. It turns out that this strategy reproduces the traffic state with a high accurracy
(Kaumann et al., 2000).
5.3.
Data connection
In North Rhine-Westphalia two traffic control centers exists: one in Recklinghausen and
in Leverkusen (figure 6). From these points data from about 3,500 inductive loops is sent
minute by minute to the controller of the simulation, which is connected to ftp-servers in
the control centers via permanent lines. To establish the connection the TCP/IP-Protocol
Firewall
TCC−LEV
FTP−Server
192.168.x.x
192.168.x.x
Traffic Control Center (TCC)
Leverkusen
Router
192.168.x.x
19,2 K
permanent−line
Modem
University of Duisburg
Traffic Simulator
Linux
Modem
Router
Computer
134.91.x.x
192.168.x.x
Modem
19,2 K
Modem
permanent−line
Router
192.168.x.x
Firewall
TCC−REC
192.168.x.x
FTP−Server
192.168.x.x
Traffic Control Center (TCC)
Recklinghausen
Figure 6. Sketch of the data connection. The local network of the simulator is connected via a router and two
permanent lines to the traffic control centers in Leverkusen and Recklinghausen.
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
379
in combination with three routers is used. For security firewalls are installed. The sub-net
used for transmission consists out of IP-Addresses of the non-official pool of IP-Addresses,
i.e., these are not routeable in the Internet. On both ftp-servers a file with aggregated data
like number of cars and trucks as well as their velocities is put every minute. These are
transferred to the controller. Besides information about the traffic volume, the status of the
variable messages signs and ramp-metering system is provided.
5.4.
Simulation run
A flowchart of the procedure of the simulation is depicted in figure 7. At the start of every
simulation the information of the road network is read from a database. This database
comprises the necessary information for the entire network, like name of the link, number
of lanes, length of the link, maximum speed on the link, static turning information (if no
dynamic data is available), connected links, and position of absorption and emission regions
as well as the position of the braking and accelerating area.
Thereafter, the on-line connection is established and data is read. These are used to
calculate dynamic turning probabilities. Then, the simulation runs for 60 update steps, i.e.,
60 seconds. One update step consists of the update of sinks and sources, the exchange of
cars between the links, the lane change and the update of the speed and position according
to the cellular automaton model. Afterward, the system waits for new on-line information
from the inductive loops.
6.
Results
The main goal of the freeway simulator is to interpolate the traffic state between check
points and to extrapolate it into areas which are hardly or not equipped with detection units.
It provides many results which can be analysed and processed in different applications. The
following data are available for all links:
• travel time,
• traffic density,
• the average velocities for different classes of vehicles.
6.1.
Application to North Rhine-Westphalia
The framework described above is applied to the freeway network of North RhineWestphalia, an area of about 34,000 km2 (see figure 8). The roads of the network have
a length of 6,000 km. There are 67 freeway intersections and 830 on- and off-ramps. The
digital version of the network consists of 3,560 edges and 1.4 million sites.
In order to provide precise travel times the length of every piece of topology, especially
transfer tracks, is determined using a Geo-Information System (GIS).2 Currently, data from
about 3,500 inductive loops are accessible. Their location is depicted in figure 8. Every
minute the aggregated amount of cars and trucks as well as their velocities are sent via
permanent lines from the control centers to the simulation.
380
WAHLE ET AL.
start of simulation
reading
topology
reading
traffic data
calculating
dynamic
routing information
counter:=0
updating sources
updating sinks
assigning dynamic
routing information
on/off ramps
lane changing
cellular automaton
update
yes
counter<60
no
calculating
simulation results
Figure 7.
Flowchart of the simulation.
update−step
updating checkpoints
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
381
Figure 8. Schematic sketch of the freeway network of North Rhine-Westphalia. The locations of the inductive
loops are marked with an open rectangle. Obviously, the density of the detection devices is in-homogeneous, e.g.,
if a VMS is installed there is very dense detection network.
6.2.
Simulation speed
Due to its design, i.e., the discrete algorithm, the cellular automaton approach has proved
to be efficient in many applications (Nagel et al., 2000; Esser and Schreckenberg, 1997;
Kaumann et al., 2000; Nagel, 1996; Rickert and Wagner, 1996; Schreckenberg et al., 2001).
Especially, it has been shown that the whole freeway network of Germany can be simulated
in multiple real-time (Rickert and Wagner, 1996). The simulator presented here, runs on a
common personal computer 500 MHz in multiple real-time.
6.3.
Extrapolation in areas of low detection density
The on-line simulation enables one to interpolate the traffic state between check points and
to extrapolate into areas which are hardly or not equipped with detection units. Nevertheless,
the empirical and simulation results allow for a more detailed examination of the network
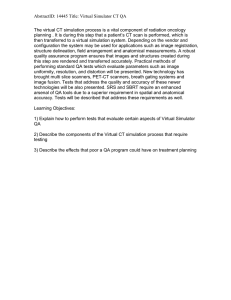
traffic. In figure 9 the number of vehicles and their mean speed during a day is depicted for
a Thursday and a Sunday.
On a typical weekday (figure 9(a) and (c)) a sharp morning peak and a higher peak in the
afternoon can be found. These reflect the daily life: in the morning, people go to work at
about 8 o’clock. Since most of the people begin to work roughly at the same time this peak is
much sharper than that in the afternoon. Albeit, the afternoon peak is higher since in addition
there is shopping traffic. On a Sunday (figure 9(b) and (d)) no clear structure is present.
Note that the number of vehicles for the empirical data is the aggregated value of all
vehicles measured at the checkpoints during the last minute. Whereas the simulation
382
WAHLE ET AL.
Thursday, Empirical Data
Sunday, Emprical data
8000
100
50
0:00
6:00
12:00
18:00
6000
100
4000
50
2000
0
0:00
24:00
Mean Velocity [km/h]
5000
Number of Cars
Number of Cars
150
Mean Velocity [km/h]
150
10000
6:00
12:00
Time
Time
(a)
(b)
Thursday, Simulation
18:00
24:00
Sunday, Simulation
15000
150
100
5000
50
0:00
6:00
12:00
18:00
24:00
150
6000
100
4000
Mean Velocity
10000
Number of Cars
Mean Velocity [km/h]
Number of Cars
8000
50
2000
0:00
6:00
12:00
Time
Time
(c)
(d)
18:00
24:00
Figure 9. No. of vehicles and mean velocity vs. time. Comparison between empirical data (a, b) and simulated
data (c, d) on a Thursday (a, c) and a Sunday (b, d). The simulated data reproduces the specific traffic patterns
found in the empirical data.
results are given in vehicles per minute in the whole network. Therefore, it is clear that
the number of cars in the simulation is higher as a result of the extrapolation by the
simulation.
The dynamic data like link travel times, densities or velocities, are visualized using
a program written in Java (figure 10).3 Additionally, it can serve as input to intelligent
systems (Adler and Blue, 1998; ITS International, 1999; Wahle et al., 2001).
6.4.
Validation of the results
Obviously, it is necessary to validate the results of the simulator. There are two ways: either
the simulation is tested by its ability to reproduce given reference states generated by an
independent simulation run. Or the simulations are compared with data for another source,
e.g., floating car data (FCD). However, network-wide information from another source can
hardly be obtained.
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
Figure 10.
383
Screen shot of the visualization of the current traffic state of the area around Cologne.
Therefore, the first method is used. The results of the simulations are compared with
artificial states (reference states) generated by an independent simulation run. In other
words, two simulation runs with two independent sets of random numbers are performed.
For the simulations themselves the same set of parameters are used, e.g., source rates.
Results of the validation process for this simulator are presented in Kaumann (2000) and
Kaumann et al. (2000).
6.5.
Dynamic route guidance systems
The simulation provides current link travel times. Obviously, these data can be processed by
route guidance systems which allow the road users to organise their trips with regard to individual preferences. However, from a mathematical point of view the problem of determining
an optimal route in a traffic network can be described as a multiple criteria optimization
problem on a graph with time dependent arc costs (for details see Wahle et al. (2001)).
7.
Conclusion
In this paper a framework for performing on-line simulations of freeway traffic has been
presented. The heart of the simulator is a microscopic traffic flow model which allows for
384
WAHLE ET AL.
high-speed simulations. This model is supplemented by the network structure and realworld traffic data stemming from about 3,500 loop detectors of the freeway network of
North Rhine-Westphalia.
Besides the model, the network structure has been discussed in detail. It consists of
basic elements, multi-lane and transfer links. These are used to construct more complex
topologies like freeway intersections. The simulation framework is applied to the freeway
network of North Rhine-Westphalia, a network of about 2,500 km.
Special attention is paid to the simulation techniques, like the vehicle guidance and the
tuning strategies, which are used to incorporate real-world data into the simulation. The
strategy which provides the best results is the ‘tuning of the mean gap’. Additionally, a
sketch of the network for the on-line connection to the traffic control centers in Leverkusen
and Recklinghausen is presented. All these processes are necessary for running the on-line
simulation.
First results of the simulation show that the typical travel patterns in the freeway network
are reproduced by the simulation. Additionally, the simulation can be performed in multiple
real-time—a basic requirement for a traffic forecast. For the future, it is planned to couple
the current data provided by the on-line simulation to historical data collected in a database
to provide a traffic forecast (Chrobok et al., 2000).
Nevertheless, every traffic forecast suffers from a fundamental problem: the messages are
based on predictions which themselves are affected by drivers’ reactions to the messages they
receive. Therefore, an anticipatory traffic forecast is necessary, which takes into consideration the reactions and decision-making of drivers (Ben-Akiva et al., 1991; Wahle et al., 2000).
Additionally, more sophisticated models seem to be necessary for a realistic description of
freeway traffic (Knospe et al., 2000). Therefore, we will study the influence of the model in
such a huge network in the future. Also the influence of ramp-metering in parts of the network
will be studied. The framework can also be used as a powerful tool for traffic flow control.
Acknowledgment
The authors would like to thank K. Froese, O. Kaumann and L. Neubert for discussion
and sharing insights. The authors are also grateful to the “Landesbetrieb NRW” for data
support and to the Ministry of Economic Affairs, Technology, and Transport of North
Rhine-Westphalia for financial support.
Notes
1. See: http://www.its.leeds.ac.uk/smartest for a comprehensive overview of different simulators.
2. The basis of the GIS is the NW-SIB provided by the state of North Rhine-Westphalia.
3. See: http://www.traffic.uni-duisburg.de for results of the on-line simulation of Duisburg.
References
Adler, J.L. and V.J. Blue. (1998). “Toward the Design of Intelligent Traveler Information Systems.” Transp. Res.
C 6, 157–172.
A MICROSCOPIC SIMULATOR FOR FREEWAY TRAFFIC
385
Barceló, J., J. Casas, J.L. Ferrer, and D. Garcías. (1999). “Modelling Advanced Transport Telematic Applications
with Microscopic Simulators: The Case of AIMSUN2.” In Traffic and Mobility: Simulation—Economics—
Environment. Heidelberg: Springer, pp. 205–221.
Ben-Akiva, M., A. de Palma, and I. Kaysi. (1991). “Dynamic Network Models and Driver Information Systems.”
Transp. Res. A 25, 251–266.
Brilon, W., F. Huber, M. Schreckenberg, and H. Wallentowitz (eds.). (1999). Traffic and Mobility: Simulation—
Economics—Environment. Heidelberg: Springer.
Ceder, A. (ed.). (1999). Proceedings of the 14th International Symposium on Transportation and Traffic Theory.
Amsterdam: Pergamon.
Chowdhury, D., L. Santen, and A. Schadschneider. (2000). “Statistical Physics of Vehicular Traffic and Some
Related Systems.” Physics Reports 329, 199–329.
Chrobok, R., O. Kaumann, J. Wahle, and M. Schreckenberg. (2000). “Three Categories of Traffic Data: Historical,
Current, and Predictive.” In Proc of the 9th IFAC Symposium Control in Transportation Systems. Braunschweig:
IFAC, pp. 250–255.
Esser, J. and M. Schreckenberg. (1997). “Microscopic Simulation of Urban Traffic Based on Cellular Automata.”
Int. J. of Mod. Phys. C 8.
Froese, K. (1998). “Simulation von Autobahnverkehr auf der Basis aktueller Zähldaten.” Master’s thesis, Universität Duisburg.
Helbing, D., H.J. Herrmann, M. Schreckenberg, and D.E. Wolf (eds.). (2000). Traffic and Granular Flow ’99.
Heidelberg: Springer.
ITS International (ed.). (1999). 6th World Congress on Intelligent Transport Systems. CD-ROM, Toronto: ITS
World Congress.
Kaumann, O. (2000). “Online-Simulation von Autobahnverkehr: Kopplung von Verkehrsdaten und Simulation.”
Master’s thesis, Universität Duisburg, Germany.
Kaumann, O., K. Froese, R. Chrobok, J. Wahle, L. Neubert, and M. Schreckenberg. (2000). “On-Line Simulation
of the Freeway Network of North Rhine-Westphalia.” In Traffic and Granular Flow ’99. Heidelberg: Springer,
pp. 351–356.
Kerner, B.S. (1999). “The Physics of Traffic.” Physics World 8/99, 25–30.
Kerner, B.S. (2000). “Phase Transitions in Traffic Flow.” In Traffic and Granular Flow ’99. Heidelberg: Springer,
pp. 253–282.
Knospe, W., L. Santen, A. Schadschneider, and M. Schreckenberg. (2000). “Towards a Realistic Microscopic
Description of Highway Traffic.” J. Phys. A 33, L477–L485.
Kosonen, I. (1996). HUTSIM—Simulation tool for traffic signal control planning. HUT Transportation Engineering Publication, 89.
Nagel, K. (1996). “Individual Adaptation in a Path-Based Simulation of the Freeway Traffic of NorthrhineWestfalia.” Int. J. of Mod. Phys. C 7, 883–892.
Nagel, K., J. Esser, and M. Rickert. (2000). “Large-Scale Traffic Simulations for Transport Planning.” In D. Stauffer
(ed.), Ann. Rev. of Comp. Phys. VII, Singapore: World Scientific, pp. 151–202.
Nagel, K. and M. Schreckenberg. (1992). “A Cellular Automaton Model for Freeway Traffic.” J. Physique I 2,
2221–2229.
Nagel, K., D.E. Wolf, P. Wagner, and P. Simon. (1998). “Two-Lane Traffic Rules for Cellular Automata: A
Systematic Approach.” Phys. Rev. E 58, 1425–1437.
Neubert, L., L. Santen, A. Schadschneider, and M. Schreckenberg. (1999). “Single-Vehicle Data of Highway
Traffic: A Statistical Analysis.” Phys. Rev. E 60, 6480–6490.
Rickert, M. and P. Wagner. (1996). “Parallel Real-Time Implementation of Large-Scale, Route-Plan-Driven Traffic
Simulation.” Int. J. of Mod. Phys. C 7, 133–153.
Schnieder, E. and U. Becker (eds.). (2000). Proc. of the 9th IFAC Symposium Control in Transportation Systems,
Braunschweig, IFAC.
Schreckenberg, M., L. Neubert, and J. Wahle. (2001). “Simulation of Traffic in Large Road Networks.” Future
Generation Computer Systems 17, 649–657.
Schreckenberg, M. and D.E. Wolf (eds.). (1998). Traffic and Granular Flow ’97. Singapore: Springer.
Wahle, J., A.L. Bazzan, F. Klügl, and M. Schreckenberg. (2000). “Decision Dynamics in a Traffic Scenario.”
Physica A 287, 669–681.
386
WAHLE ET AL.
Wahle, J., O. Annen, C. Schuster, L. Neubert, and M. Schreckenberg. (2001). “A Dynamic Route Guidance System
Based on Real Traffic Data.” Euro. J. Op. Res. 131, 302–308.
Wallentowitz, H., D. Neunzig, and J. Ludmann. (1999). “Effects of New Vehicle and Traffic Technologies—
Analysis of Traffic Flow, Fuel Consumption and Emissions with PELOPS. In Traffic and Mobility: Simulation—
Economics—Environment. Heidelberg: Springer, pp. 181–192.
Yang, Q. and H.N. Koutsopoulos. (1996). “A Microscopic Traffic Simulator for Evaluation of Dynamic Traffic
Management Systems.” Transp. Res. C 4, 133–129.