Comparison of monopile, tripod, suction bucket and gravity
advertisement

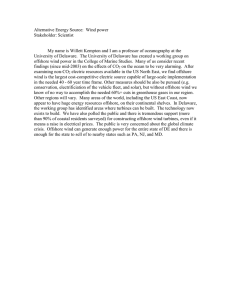
Comparison of monopile, tripod, suction bucket and gravity base design for a 6 MW turbine Michiel B. Zaaijer Delft University of Technology, Section Wind Energy Stevinweg 1, 2628 CN Delft, The Netherlands Tel. +31 15 27 86426, Fax +31 15 27 85347, M.B.Zaaijer@citg.tudelft.nl Abstract In the medium term, offshore wind turbines will increase to around 6 MW rated power. This paper analyses support structures for these turbines in medium water depths (around 20 m). After a discussion of the design drivers for several concepts, typical dimensions are obtained, as well as sensitivities of dynamic behaviour. 1 Introduction Particularly for the offshore market, wind turbines continue to be proposed and built to ever-greater sizes, with 3 MW to 5 MW set as the next target. Furthermore, after an increase of demonstration wind farms in sheltered waters, exploitation of exposed sites in deeper water has set off with the wind farms at Blyth (UK), Horns Rev (DK) and Samsø (DK). This tendency toward larger sized turbines and hostile locations will continue, as large-scale implementation of offshore wind energy proceeds. The availability of benign locations and public acceptance of wind turbines at visible near shore sites with larger numbers of migrating birds is waning. Since many of the expensive offshore activities for installation and maintenance are more or less proportional to the number of turbines, increase of turbine scale will continue to provide economic benefits for some time to come. The subject of this paper is the comparison of support structure concepts for these very large turbines. The investigation is carried out in the framework of DOWEC (Dutch Offshore Wind Energy Converter), in which a 6 MW turbine is designed for offshore conditions [1]. Numerous recent and older studies have investigated support structures for offshore wind turbines. The current study continues these investigations in the context of medium term developments for offshore wind energy. Monopiles and gravity base structures are used in current offshore wind farms, but monopiles tend to become extremely wide as turbines grow and gravity base structures are known to experience very significant heave forces at exposed sites with intermediate water depths. To overcome scaling problems of monopiles, several planned wind farms have already proposed to use tripod structures. Due to its expected installation benefits, a full scale prototype suction bucket foundation has recently been tried in Frederikshavn. Although not directly copied, the considered concepts have a fair base in the offshore industry, thus building on existing experience and minimising technical and operational risks. The current study enables a direct comparison of the properties of these concepts for the same conditions, unlike many other studies that focus on a single concept. Furthermore, the fundamental principles of the concepts and the design drivers are brought together and compared. The physical models that are used in this study are deliberately simple, but still capture the main features required to obtain proper insight in the designs. 2 Definitions and scope of work Support structure, tower and foundation Throughout this paper ‘support structure’ is used to indicate the entire structure below the yaw system, including possible sub-seabed constructions. The support structure consists of a tower and a foundation. The most arguable definition is the boundary between these two and this has lead to miscommunication on various occasions. Contactors prefer to divide the two at a structural boundary, such as the flange at the access platform several meters above sea level, calling the entire sub sea structure the foundation. In the more abstract context of a concept study this division is impracticable, as concepts for the submerged structure and the structure in or on the seabed can often be selected separately. For example, a tripod can be combined with both piles and suction buckets. Therefore, ‘foundation’ will be reserved to indicate that part of the structure that is in direct contact with the seabed and for which geotechnical considerations are the design driver. For piles the foundation ends at the seabed, whereas gravity bases may include a (ballasted) slab just above the seabed. Lumping of mass and stiffness properties at this boundary is shown in [2] to lead to acceptable predictions of dynamic behaviour, whereas lumping to effective values at the flange above sea level is expected to lead to large errors at higher frequencies. To acknowledge the differences between the design drivers of the upper and lower parts of the tower, a distinction is made into a ‘marine segment’ and a ‘top segment’, as illustrated in Figure 1. Note that not all support structure concepts are conveniently covered by these definitions. For instance, the early gravity bases in shallow waters extend above sea level and miss the marine segment of the tower. Tower - top segment Transfer of loads from nacelle to marine segment Blade tip clearance from tower and water Monopile Gravity base Tripod Tower - marine segment Transfer of loads through the marine environment Provide facilities for boat access Foundation Transfer of loads to the seabed Geotechnical design Suction buckets (‘Nicknames’) Figure 1 - Definitions of the support structures Analysed concepts This paper treats two concepts for the marine segment of the tower and three foundation concepts. The combinations of these concepts that are explored are shown in Table 1 and were also illustrated in Figure 1. All concepts are combined with the same conical top segment that starts at 9 meters above MSL. Table 1 - Support structure concepts that are analysed in this study (driven) Pile Suction bucket Gravity base X X Single column X X Tripod As mentioned in the introduction, these concepts have a fair base in the offshore industry. Some other concepts, such as guyed support structures and lattice towers, have reached an advanced status on the drawing board and a prototype of a suction bucket has already been built (see for instance [3]). However, after a preliminary qualitative and intuitive assessment, these concepts were currently left out of consideration due to time restrictions. Floating concepts are out of the scope of this study, as their known economic disadvantage will hamper implementation in medium deep waters in the medium term [4]. Complexity of the models and used tools Many disciplines are involved in the design of support structures for offshore wind turbines: mechanics, dynamics, aerodynamics, electro mechanics, hydrodynamics, geo-mechanics, material science, production and installation technology and design methodology. Each of these disciplines has developed sophisticated models, either for (offshore) wind turbines or for other applications. Some of these models are implemented in simulation tools for offshore wind turbines, but these are particularly directed at monopile and conical tower support structures. Furthermore, simulation tools are rigorous, time-consuming and require detailed user input, which doesn’t match the exploratory nature of this investigation. Therefore, new tools are developed that try to capture the essence of the sophisticated models, but at the same time are easily implemented and provide insight in the issues from a designer’s perspective [5]. Comprehension of important design drivers and feasibility of concepts are considered more important than obtaining fully optimised and approved solutions. The reader must keep this in mind when the actual design results are presented. The effect of interaction between the support structure and the turbine on dynamics and fatigue loading is ignored. For a final design this would necessitate undesirable conservatism in the safety factors and would consequently be unacceptable from an economic point of view. Even for this exploratory study it is arguable that this approach may fail to reveal important differences between different concepts, as fatigue due to combined wind and wave loading is known to be an important aspect. However, incorporation of a proper model for dynamic, combined (lifetime) loading increases complexity of the design tools with an order of magnitude. The dynamic response is implemented with a simple gust response factor of 1.5 for aerodynamic loading and no dynamic amplification is applied to hydrodynamic loading. The loading conditions during the lifetime of an offshore wind turbine are diverse and depend on the instantaneous conditions of wind, wave and operational status and on dynamic response. Literature describes a large variety of possible and realistic extreme conditions, from which the following three load cases were selected from [6]: • • • E.2.1: Stand-by condition in a 50-year extreme gust and reduced wave E.2.2: Stand-by condition in a 50-year extreme wave and reduced gust S.1.3: Production with failed pitch control in extreme gust at rated wind speed This selection of load cases covers extreme wind conditions at stand still and during operation and extreme wave conditions. Therefore, it is expected that the order of magnitude of the various types of loading is correctly represented by the load cases. 3 Description of the design conditions Turbine This study focuses on support structures for multi-Megawatt wind turbines in medium deep waters. To obtain typical dimensions and to establish typical numerical values for design drivers, a design case is specified. The design case is formulated in the framework of the DOWEC project and comprises a 6 MW turbine. The concept of the wind turbine is similar to the popular concept for onshore turbines of the MW+ class. The rotor consists of three blades that are equipped with pitch regulation. Variable speed operation is obtained with a doubly fed generator with a 30% power inverter. Using a gearbox with a ratio of approximately 90, rotor speed varies between 7.5 and 14 rpm, with a nominal value of 11.8 rpm at 110% of synchronous generator speed. The mass of nacelle and rotor equals 272·103 kg. The aerodynamic design of the blade is based on 5 DU-airfoils up to 42.5 m rotor span and one NACA-airfoil for the tip section. With a rotor diameter of 129 m, nominal power is achieved at a rated wind speed of 12 m/s at the hub height of 91.4 m above Means Sea Level (MSL). Tower, top segment The top segment of the tower, extending from 9 m above MSL to the yaw system, is a tapered cylindrical tower, similar to its land-based counterparts. Although above sea level, hydrodynamic loading may also cause stresses in this part of the tower, due to dynamic response of the structure. For soft structures fatigue damage of the top segment due to hydrodynamic loading may even be in the same order of magnitude as below sea level [7]. However, since the quasi-static hydrodynamic loading considered in this study doesn’t affect the structure above sea level, the design of the top segment is the same for all support structures. Note that in a more detailed design study the top segment might vary between the concepts due to consideration of dynamic response, dimensions of the connection between top segment and marine segment, etcetera. Assuming a diameter to wall thickness ratio of 200, the dimensions of the top segment are found as given in Table 2. These dimensions provide sufficient strength and safety margin for the three considered load cases. The diameter and wall thickness vary with steps at small height intervals, which evidently reflects that manufacturing constraints are not yet considered. The dimensions near the top reduce more than realistic, because moments on the yaw system are not modelled. Table 2 - Dimensions of the top segment of the tower for all concepts Height above seabed Diameter (m) Wall thickness (m) 30 (flange 9 m above MSL) 6.1 0.031 40 5.9 0.029 50 5.6 0.028 60 5.2 0.026 70 4.9 0.024 80 4.5 0.022 90 3.9 0.020 100 3.3 0.017 110 (tower top) 2.1 0.010 Tower mass above flange (kg) 226·103 Site conditions The reference location is in the North Sea, 50 kilometres off the South coast of The Netherlands. Within the area selected for the wind farm the surface elevation of the seabed varies due to sand waves. The minimum water depth in the area of 21 m (MSL) is selected for the design case. Soil conditions are based on geological maps and borehole descriptions of TNO-NITG. The sand waves overlay 5 m firm clay, which starts at 36 m below MSL. The next 35 m consist of fine to medium dense sand, followed by clay with sand intercalations. Wind and wave conditions are established from the NESS/NEXT database, which contains hindcast data for over thirty winter seasons and nine summer seasons. The hourly mean wind speed and extreme significant wave height are translated to extreme and reduced gusts and wave heights, respectively, using the guidelines in [6] and assuming a power law atmospheric boundary layer profile with exponent 0.082. The relevant parameters that were determined are given in Table 3. Table 3 - Wind and wave parameters for the design case Parameter Value (wind speeds at 10 m above MSL) Extremes with 1 year return period: Extreme hourly mean wind speed (m/s) 18.8 Extreme/reduced gust (m/s) 24.8 / 22.6 Extreme significant wave height (m) 4.30 Extreme/reduced wave height (m) 8.0 / 5.7 Extremes with 50 year return period: Extreme hourly mean wind speed (m/s) 27.3 Extreme/reduced gust (m/s) 36.0 / 32.8 Extreme significant wave height (m) 6.35 Extreme/reduced wave height (m) 11.8 / 8.4 Operating conditions: Wave height at rated wind speed of 12 m/s at hub height (m) 2.1 4 Design principles and design drivers Hydrodynamic loading The calculation of hydrodynamic loading is usually performed in two stages: first, the water particle kinematics is determined and second the pressure and drag forces are calculated. A general indication of the applicability of models for water particle kinematics and load calculations for wind turbines is provided by [8]. Small waves can usually be treated with linear wave theory, whereas the higher waves in the relatively shallow waters where wind turbines will be installed need to be treated with non-linear theories, such as Stokes’ model or Dean’s stream function. Particularly at spits and sand banks, a popular place for wind turbines, breaking waves with very non-linear kinematics can occur. However, most common extreme stresses due to wave loading of wind turbine towers will occur with highly non-linear, but nonbreaking waves [9]. In the current study linear wave theory is used nevertheless, as this is much easier to implement. In general, this will lead to an underestimation of the extreme forces for the given wave height. For slender structures, such as monopiles and members of the tripod, the presence of the structure can be ignored when calculating water particle kinematics. The most commonly applied model to calculate the loads, Morison’s equation, compensates for the influence of the structure through its inertia coefficient. More compact structures, such as gravity bases, influence the movement of the water more significantly, which would require diffraction theory and integration of the local surface forces. According to [8], an adaptation of the inertia coefficient in Morison’s equation gives acceptable results without diffraction theory. In this study Morison’s equation is used for lateral loading of all submerged structural elements, with a size-dependent inertia coefficient for gravity base structures. For gravity base structures heave force on the horizontal surface is very significant. In this study heave force is calculated with Bernoulli’s equation for the undisturbed water kinematics, rather than with more accurate diffraction models. Hydrodynamic loading complicates the design of a gravity base severely, as it requires a simultaneous hydrodynamic and geotechnical analysis. The design of a foundation pile (below the mudline) is much easier separated from the hydrodynamic analysis of the marine segment of the tower. Heave force on the (smaller) topside of suction buckets is ignored all together in this investigation, as this short term loading is expected to be absorbed by the dynamic suction effect that is discussed later. Soil mechanics The dominating geotechnical principles are very different for the four foundation concepts: the laterally loaded monopile, the axially loaded piles of the tripod, the sealed suction bucket and the gravity base foundation under combined loading. The lateral loads on the monopile are counteracted by a pressure difference between both sites of the pile that is initiated by a displacement of the pile. For small displacements the pressure increases linearly, but at larger displacements plastic deformations cause the pressure to level off. The design of the laterally loaded pile is based on Blum’s assumption, which considers a pile in perfectly plastic material with an effective clamping depth. When a linearly increasing effective vertical soil pressure is assumed the clamping depth can be expressed analytically in soil and pile parameters [10]. The plastic behaviour of the soil gives a good engineering representation of the limit state. The model corresponds reasonably well to finite element analysis of pile deflections for actual pile penetrations exceeding the clamping depth by 30% [11]. Thus, a pile design length of 1.3 times Blum’s clamping depth is assumed to give negligible toe-kick. The bearing capacity of an axially loaded pile comprises shaft friction and pile point resistance. In case of hollow piles the soil inside the pile contributes to the bearing capacity by friction with the inner wall, or by point resistance of the soil plug at the pile tip, whichever is less. When a linearly increasing effective soil pressure is assumed the shaft friction according to Coulomb’s relation for frictional material, the pile point resistance following the theory of Prandtl, Terzaghi and Brinch Hansen and the required bearing capacity give a quadratic expression for the pile length. The type of suction bucket considered here is a cylinder with a cap that is sealed after installation. Since no active suction is applied after installation of the bucket, the geotechnical principles of axially loaded piles also apply here: skin friction and point resistance. The point resistance of the pile tip is typically negligible, but the cap of the bucket causes very significant bearing capacity by pressing on the soil plug inside the bucket. Under tensile loads, the vertical displacement of the cap will result in a pressure reduction below the cap. During longer tensile loading the suction area below the cap will be drained and only skin friction will remain. Typical time-scales for this process differ very much for different bucket dimensions and different soil types [12]. In this study it has been assumed that the time scales for waves and wind gusts are smaller than the drainage times. Furthermore, it has been assumed that the suction force is always sufficient to withstand these dynamic loads and that the relatively large static wind loading on the rotor and tower dominate the geotechnical design. As a consequence, only a static resistance model is implemented. The skin friction and end resistance are integrated numerically. The gravity base must provide sufficient resistance against sliding and sufficient vertical bearing capacity. The required sliding resistance determines the minimum weight of the system, based on Coulomb’s relation for frictional material. Vertical bearing capacity is calculated according to the theory developed by Prandtl, Terzaghi and Brinch Hansen. Only the contribution of the soil weight is taken into account, because this is commonly the largest contribution to bearing capacity for an offshore GBS. Correction coefficients for inclined loading and overturning moment are included, since these affect the design to a large extend. The bearing capacity of the gravity base is checked for many phases of the incoming wave, due to its sensitivity to the ratio between vertical and horizontal loading [13]. Installation Tripod piles are of similar type and size of conventional offshore structures and the installation of these is currently routine. Monopiles for 6 MW wind turbines have much larger diameters than current piles, which may cause practical problems, such as the lack of sufficiently heavy hammers. However, no physical restrictions are expected for 5-6 m piles. The ratio of diameter to wall thickness of the tripod piles and monopile are fixed at 60 and 100, respectively, as a preliminary criterion to avoid buckling during pile driving. This is slightly more optimistic than the guidelines in [14] but follows the same general increasing trend with increasing pile diameter. For suction buckets the installation process is a significant factor for the structural design. The driving force during installation of the suction bucket is the hydrostatic pressure difference over the cap and the deadweight of suction bucket, ballast and preassembled parts of the tower. It has been assumed that the pressure inside the suction bucket can be reduced to zero, although in reality this may cause liquefaction of the soil at the point of critical suction [15]. The assessment of installation is based on the procedure outlined for skirted foundations in [16]. A “highest expected” skin friction and end resistance are used to determine the resistance during installation, while “most probable” values are used in the calculation of bearing capacity. Effects of pore pressures on skin friction and tip resistance are not considered, although an indication of this simplification is given in Chapter 5. For gravity bases the installation process may result in requirements for the structural design for practical reasons, such as the capacity of the installation vessel or the size of the workspace. As these are not specified, no requirements are used in this study. Dynamics The dynamic behaviour of the support structure is an important design driver for offshore wind turbines [17]. The foremost criterion is avoidance of resonance at wave excitation frequencies, the rotor frequency and blade passing frequencies. In this study the natural frequency of some design results are determined with Rayleigh’s method or a finite element model, to get insight in its value and variability. As turbines get higher, the natural frequency of monopiles comes down into the highenergy part of the wave spectrum. It is expected that the stiffer tripod suffers less from wave-resonance and provides more opportunities to tune the natural frequency. Only the stiffness of pile foundations is modelled, using springs that represent forcedisplacement relations at regular intervals along the pile. Scour Due to changed currents around the structures, erosion of the seabed will occur. Due to the scour hole that originates from this process the soil supporting the foundation starts at a lower level and the overburden pressure on deeper layers reduces. As a consequence, bearing capacity and resistance of the foundation reduces and the natural frequency drops. Initially, protection of the seabed against scour is assumed, for instance by rock dumping. For the monopile and piled tripod the effect of omission of scour protection is looked at. For the gravity base and suction buckets scour is expected to be unacceptable, due to their high reliance on near-surface soil. On larger scale natural sediment displacements may result in rise or drop of the entire seabed around the structure. The magnitude is independent of size of the construction and can be several meters at some North Sea sites. These sites are particularly unsuitable for gravity bases, suction buckets and to some extent piled tripods. 5 Design space and typical results Monopile The design freedom of the monopile is very limited. The main parameter that can be influenced is the ratio between diameter and wall thickness. In this study a fixed ratio of 200 is taken at all heights above the seabed and a fixed ratio of 100 for the foundation pile. Increase of this ratio results in a lighter construction, but buckling risk imposes a limit. Land-based towers for wind turbines are built with a ratio up to 300, but local impacts of waves, ships and flotsam and jetsam increase buckling risks. Table 4 gives the dimensions of the monopile for these more or less optimum ratios. Table 4 Dimensions of the monopile Mass (kg) 158·103 Marine segment Height above seabed Diameter (m) Wall thickness (m) 30 (= 9 m above MSL) 6.1 0.030 20 6.3 0.032 10 6.6 0.033 0 6.9 0.035 Mass (kg) 199·103 Foundation pile Penetration depth (m) Diameter (m) Wall thickness (m) 26 5.6 0.056 Mass (tonnes) 500 0.40 Foundation+marine segment 400 Natural frequency 300 Marine segment Foundation 200 100 100 120 0.35 140 160 60 180 80 Natural frequency (Hz) Variation of the ratio between diameter and wall thickness is also a means to adapt the natural frequency of the monopile support structure. The effectiveness of this means is shown in Figure 2, together with the effect on structural mass. In Figure 2 the ratio between diameter and wall thickness of foundation and marine segment are coupled. 200 Tower - marine segment 0.30 100 Foundation pile Ratio diameter/wall thickness (-) Figure 2 - Variation of monopile mass and natural frequency with diameter to wall thickness ratio (natural frequency determined with Rayleigh’s method) When no scour protection is applied, a scour hole of approximately 1.5 times the pile diameter is expected. The foundation pile has to be adapted to this hole by increasing diameter and wall thickness with 7% each and increasing pile penetration with 4.8 m, resulting in an increase of mass by approximately 35%. Additionally, a means to cross the scour hole with the electricity cable has to be provided. The marine segment can remain more or less the same, lest manufacture and installation allows. The effect of scour on the natural frequency is shown in Figure 6 below. Gravity base structure The marine segment of this concept is nearly equivalent to that of the monopile, being cut-off at the GBS top surface. Considerations of manufacturing, installation and dynamic behaviour may result in differences, but the basic design principles are the same. Therefore, this section focuses on the foundation of this concept. The weight of a gravity base has to be sufficient to avoid uplift, tilting and sliding, while at the same time avoiding failure of the subsoil. The main parameters to achieve this balance are the diameter and height of the gravity base. Figure 3 shows which gravity bases provide a stable foundation and where boundaries of failure mechanisms occur. The correction factors on bearing capacity reduce to zero at severely inclined loads or tilting, making the boundary for bearing an envelop for all failure mechanisms. GBS height (m) 10 Stability boundaries Instable Bearing Stable Sliding 5 Tilting Bearing (no corrections) 0 0 10 20 30 40 50 Lifting GBS diameter (m) Figure 3 - Stability boundaries for gravity base structure Overturning moment 1E+8 Horizontal 0E+0 Vertical -1E+8 0.0 0.5 1 3E+8 Capacity 0E+0 0.0 1.0 0 0.5 -Vertical load 1.0 Wave phase (-) Correction and utilisation (-) Effective area correction Inclination correction 6E+8 Utilisation 2E+8 Force and capacity (N) External forces (N), (Nm) The minimum (dry) mass of a stable gravity base of 4100·103 kg is obtained for a GBS with 22 m diameter and 2.7 m height. Curious enough, this is nearly the same mass of a gravity base for a 3 MW turbine, studied in [13] in a slightly more benign environment. Apparently, heave force on the gravity base itself is more dominant than the large overturning moment due to aerodynamic loads. The forces on this gravity base, including wind and wave loading on turbine and tower, are shown in Figure 4, along with its utilisation of the vertical bearing capacity. The correction factors for inclination and effective area indicate the effect of inclined and off-centre loading, respectively. The bearing capacity for a purely vertically loaded situation is multiplied with these correction factors to obtain the displayed capacity. The narrow peak of the utilisation demonstrates that bearing capacity needs to be checked at small intervals. Wave phase (-) Figure 4 - Forces and utilisations of gravity base (ø = 22 m, height = 2.7 m) Tripod The main design parameters for the tripod are the height of the joint and the base radius. Only main member-forces are determined, using a statically determinate beam model. The resulting mass for the marine segment and piles are shown in Figure 5. 3 Piles 10 15 20 25 30 35 45 40 40 40 35 35 35 30 30 30 25 25 25 20 20 20 15 15 15 10 5 40 10 15 60-100 100-140 20 25 30 35 10 5 40 10 15 140-180 200-250 250-300 300-350 20 25 30 35 10 40 Base radius Base radius Base radius 20-60 Piles + marine segment 45 Node height 5 Marine segment 45 350-400 250-300 300-350 350-400 400-450 Figure 5 - Variation of tripod mass with joint height and base radius (in 103 kg) Variation of the ratio between diameter and wall thickness (equal to 100 for the braces and 50 for the central column in Figure 5) did not have a significant effect. At the reference site the splash zone is estimated to be between 14 and 29 m above the mudline. Considering corrosion, maintenance and wave impacts, the splash zone is an unfavourable location for the tripod joint. Therefore, a joint height of 30 m above mudline is selected, giving a minimum mass of tripod and piles at a 20 m base radius. The corresponding dimensions are given in Table 5. Table 5 - Tripod dimensions Node height, above seabed (m) Base radius, from tower to pile (m) Outer diameter (m) Braces Wall thickness (m) Outer diameter (m) Base Wall thickness (m) Central column Top diameter (m) Top wall thickness (m) Base diameter (m) Base wall thickness (m) Outer diameter (m) Piles Wall thickness (m) Length below mudline (m) Tripod mass (marine segment) (kg) Mass Pile mass, total of 3 piles (kg) 30 20 Overall 1.52 0.015 0.77 0.015 3.90 0.078 2.00 0.040 1.05 0.017 32.4 216·103 43·103 Figure 6 shows the first and second natural frequency of several design solutions of Figure 5. These natural frequencies are obtained from FEM analysis and cannot be compared directly with the monopile results of Figure 2, which were obtained with Rayleigh’s method. Apparently, the influence of the main design parameters on the first natural frequency is marginal, but some variation in the second natural frequency can be achieved. A similar conclusion was found for variation of the tripod topology. Local scour 45 2.89 0.81 40 35 0.249 1.32 25 0.254 1.39 15 30 20 5 10 15 20 25 30 35 10 40 Base radius 250-300 300-350 350-400 Node height . 0.269 1.05 2.67 0.90 Relative natural frequency (-) Design variation 0.287 0.92 1.0 Monopile 0.9 Tripod 0.8 1st Mode 0.7 2nd Mode 0.6 0 0.5 0.0 0.4 0 2 2 4 6 *Diameter Tripod (-) 0.5 1.0 1.5 *Diameter Baseline (-) 4 6 Scour depth (m) 8 400-450 Figure 6 - 1st and 2nd natural frequency variation (in Hz) When no scour protection is applied, the scour hole will be smaller than that of the monopile, but current around the marine structure is also expected to contribute to seabed erosion. Assuming a scour hole of 7 m, the pile diameter has to increase with approximately 35% and its mass is increased with nearly a factor 2. The effect of scour on the natural frequency of tripod and monopile is also shown in Figure 6. Suction buckets The tower of this support structure concept is nearly equivalent to that of the piled tripod, although the connection of the larger suction buckets may require some adaptation of the tripod base. In this study the previously discussed tripod is used and this section focuses on the suction bucket foundation. There are two basic requirements for the suction buckets: installation has to be possible with the achievable hydrostatic force and resistance to operational loads has to be sufficient. The main dimensions that can be varied are the bucket diameter and penetration depth. Figure 7 shows which buckets can be installed at the reference site and which buckets provide sufficient resistance to the loads, resulting in feasible buckets for this design case. In this study the tripod is connected to the three suction buckets during installation, providing some additional deadweight. Compression 3 5 7 9 Diam eter 11 13 Installation All 1 1 1 1 6 6 6 6 11 11 11 11 16 16 16 16 21 15 1 3 5 7 9 Diam eter 11 13 21 15 1 3 5 7 9 Diam eter 11 13 21 15 Penetration depth 1 Tension 21 1 3 5 7 9 11 13 15 Diam eter Figure 7 - Feasibility of suction buckets (dark area meets criterion) The lightest bucket in Figure 7 has a diameter of 8 m and a height of 8 m. With average wall thicknesses of 20 mm and 40 mm for rim and cap, respectively, this results in a mass of nearly 50·103 kg per bucket. (These wall thicknesses are not thoroughly engineered). Note that critical suction is not analysed, resulting in a possibly larger required diameter after more detailed study of the installation. The results of some alternative studies are presented in Figure 8. Drainage currents are known to reduce the resistance during installation. This was initially ignored, but Figure A shows the results of a very optimistic assumption of reduced resistance. Even though the resistance is reduced by nearly 50%, the effect on the lightest feasible suction buckets on the left-hand side is very small, due to the dominance of the operational requirements. Previous studies indicated that suction buckets are more economic in clays than in sandy soils [18]. In clays the margin between “most probable” and “highest expected” resistance is smaller, resulting in a smaller margin between the expected undesired installation resistance and desired operational resistance. Furthermore, the skin friction in clay is already fully available at small penetration depths, whereas skin friction in sand builds up with penetration. Figure B shows the feasibility in case the 5 m thick clay layer is shifted upward to the mudline. Figure C shows the effect of reduction of the vertical (non-gravity) loads by 50%, due to an increase in tripod base radius. The lightest suction bucket at ø 6 m and 7 m height is 30% lighter than the initial design. Thus, the optimum tripod base radius for a suction bucket foundation will be larger than for driven piles. The extra deadweight of a preassembled turbine and top segment of the tower can facilitate the installation of the suction buckets. The effect, as shown in Figure D, is marginal, as the structural weights are marginal compared with the hydrostatic forces. Installation benefit 3 5 7 9 Diam eter 11 13 Wider tripod Extra deadweight 1 1 1 6 6 6 6 11 11 11 11 16 16 16 16 21 15 1 3 5 7 9 11 13 21 15 1 3 Diam eter 5 7 9 Diam eter 11 13 21 15 1 3 5 7 9 11 13 Penetration depth 1 Clay toplayer 1 21 15 Diam eter Figure 8 - Feasibility of suction buckets for alternative situations 6 Conclusions and recommendations As a result of the different models for the design of each of the support structures, the uncertainties partly correspond and are partly independent. The last type of uncertainty evidently hinders a comparison of the concepts. A thorough analysis of the uncertainty would require more detailed design of each structure, with more precise models, but that is outside the scope of this study. Therefore, the conclusions drawn from the presented results must be put into perspective of the applied simple models. Likewise, it is emphasised that the conclusions are based on a particular design case and are not necessarily valid for all conditions. Table 6 summarises the structural masses found in this design study. The piled tripod is the lightest structure, due to the light foundation piles. This conclusion still holds when no scour protection is applied. However, fabrication of the tripod is likely to be more costly than the monopile and requires more space. Optimisation of the manufacturing process is therefore a beneficial and essential task for tripods. The costs and duration of the installation, as well as the availability of equipment will play an important role in the selection between monopiles and piled tripods. Table 6 - Structural masses for foundation and marine segment (in 103 kg) (Top segment 226) (Mono) (Tripod) Suction Gravity pile piles (3) buckets (3) base 199 43 150 4100 158 357 4258 Single column 216 259 366 Tripod As known and shown, the installation requirements of the suction bucket tend to result in wide, shallow foundations. Because the pile-soil friction for cohensionless soils increases with penetration depth, suction buckets require a larger surface than driven piles. This is only partly compensated by the smaller wall thicknesses that are required for the benign installation procedures of suction buckets. Therefore, the tripod with suction buckets is the heaviest all-steel construction. Although slightly different conditions may render this structure lighter than the monopile, fabrication will be even more costly and spacious than that of the piled tripod. The largest benefit of this concept is expected from its suitability to install the support structure with a preassembled turbine. The gravity base structure is more difficult to compare with the other structures, due to the very different type of material and manufacturing process. Considering that manufacturing costs per kg of steel structures and reinforced concrete structures differ in the order of 30, the gravity base may be competing with the other structures. This reversal of the trend to steel structures seen in current practice would be caused by the smaller increase of gravity bases with turbine scale. However, it must be noted that gravity base designs are very case and site specific and this conclusion is not generic. Furthermore, installation, seabed preparation, scour-protection and non-technical issues also differ significantly from those of the steel structures. Adaptation of the first natural frequency in the design phase has a smaller impact on structural weight for the tripod than for the monopile, but the range of variation is smaller than expected. The second natural frequency of the tripod can be more easily adapted. The counter effect is a larger sensitivity of the tripod’s second natural frequency to scour. A more detailed analysis of natural frequencies that is not presented in this paper showed that the first natural frequency of the tripod was only 10% higher than that of the monopile, while the second natural frequency was 10% lower. Therefore, the extra stiffness of the tripod has a relatively small effect on resonance frequencies. However, it may contribute to a smaller crosstalk of hydrodynamic (fatigue) loading to the top segment (see [19]). Acknowledgement The work presented in this paper is partly performed within the DOWEC project, which is subsidised by the Dutch Ministry of Economic Affairs through the EET programme. The contributions of the partners in the DOWEC project are gratefully acknowledged. References [1] Hendriks, H.B., e.a., Variations on a 500 MW offshore wind farm design, In: Proceedings of OWEMES 2003, ENEA, Italy, April 2003. [2] Zaaijer, M.B., Foundation models for the dynamic response of offshore wind turbines, In: Proceedings of MAREC 2002, UK, September 2002. [3] Carey, J., Guyed support structures for offshore wind turbines, In: Proceedings of Gigawind symposium, Germany, September 2002. [4] Henderson, A.R., Vugts, J., Prospects for floating offshore wind energy, In: Proceedings of EWEC 2001, Denmark, July 2001. [5] Zaaijer, M.B., Broek, W. van den, Bussel, G.J.W. van, Toward Selection of Concepts for Offshore Support Structures for Large Scale Wind Turbines, In: Proceedings of MAREC 2001, UK, March 2001. [6] Germanischer Lloyd, Rules for Regulations IV – Non-Marine Technology, Part 2 – Offshore Wind Energy, Hamburg, 1995. [7] Ferguson, M.C. (editor); Kühn, M.; Bussel, G.J.W. van; Bierbooms, W.A.A.M.; Cockerill, T.T.; Göransson, B.; Harland, L.A.; Vugts, J.H.; Hes, R., Opti-OWECS Final Report Vol. 4: A Typical Design Solution for an Offshore Wind Energy Conversion System, Delft, 1998. [8] Henderson, A.R., Zaaijer, M.B., Camp, T.R., Hydrodynamic loading on offshore wind turbines, In: Proceedings of OWEMES 2003, ENEA, Italy, April 2003. [9] Okan, B., Personal communication relating to the article: Okan, B., Downie, M.J., Incecik, A., Investigation of wave loads on wind turbine structures in shallow waters, In: Proceedings of MAREC 2002, UK, September 2002. [10] Verruijt, A., Laterally Loaded Pile, In: Milieu-Effect Rapport Locatiekeuze Demonstratieproject Near Shore Windpark (in Dutch), Den Haag, 1999. [11] Aupers, H.A., The Effect of Variable Soil Conditions and Water Depth on OWEC Foundations, Student Thesis Report, Delft 2000. [12] Rasmussen, J. Lorin, Feld, T., Sørensen, P. Hald, Bucket Foundation for Offshore Wind Farms - Comparison of Simplified Model and FE-Calculations, In: Proceedings of OWEMES 2000, ENEA, Italy, April 2000. [13] Henderson, A.R., Zaaijer, M.B., Hydrodynamic loading of compact structures and the effect on foundation design, In: Proceedings of MAREC 2002, UK, September 2002. [14] API, RP 2A-LRFD: API Recommended Practices for Planning, Designing and Constructing Fixed Offshore Platforms – Load and Resistance Factor Design, First Edition, July 1, 1993. [15] Feld, T., Design Procedures for Bucket Foundations - a New Innovative Foundation Concept Applied to Offshore Wind Turbines, In: Proceedings of Offshore Wind Energy Conference (CD-rom), Belgium, December 2001. [16] DNV, Foundations - Classification Notes, No. 30.4, Norway, Februari 1992. [17] Tempel, J. van der, Molenaar, D.P., Wind Turbine Structural Dynamics - a Review of the Principles for Modern Power Generation, Onshore and Offshore, Wind Engineering, Vol. 26, No.4, 2002. [18] Birck, C.; Gormsen, C., Recent Developments in Offshore Foundation Design, In: Proceedings of the European Wind Energy Conference, France, March 1999. [19] Kühn, M., Dynamics and Design Optimisation of Offshore Wind Wind Energy Conversion Systems, PhD thesis, Delft University of Technology, Delft, 2001.