A finite element model of electric machine with flux switching
advertisement

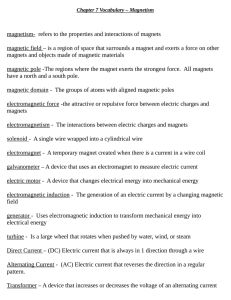
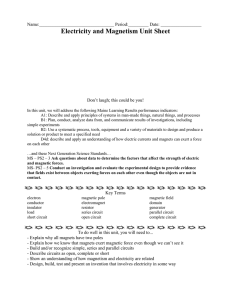
ISSN 10683712, Russian Electrical Engineering, 2012, Vol. 83, No. 3, pp. 126–131. © Allerton Press, Inc., 2012. Original Russian Text © V.A. Dmitrievskii, V.A. Prakht, F.N. Sarapulov, V.A. Klimarev, 2012, published in Elektrotekhnika, 2012, No. 3, pp. 7–13. A Finite Element Model of Electric Machine with Flux SwitchingOver for Studying the Dynamic Operation Modes V. A. Dmitrievskii, V. A. Prakht, F. N. Sarapulov, and V. A. Klimarev Received February 23, 2012 Abstract—The article is devoted to modeling the dynamic modes of a flux switching machine using the finite element method. The proposed model allows one to study highly dynamic transient processes in an electric machine under arbitrary control algorithms and take into account the geometric features of the machine in detail, the saturation, and the energy dissipation in magnets and steel. Keywords: electric machine, flux switchingover, permanent magnet, mathematical modeling. DOI: 10.3103/S1068371212030042 Electric machines with permanent magnets on a stator (EMs with PMs on a stator) have attracted con siderable interest in recent years. In the Englishlan guage literature [1], such machines are called stator interior permanent magnet machines, or stator–PM machines. The main advantage of stator–PM EMs is the absence of permanent magnets on the rotating stator. The magnets do not need to be glued to the rotor or fixed in a special way. The simpler the rotor fabrica tion, the cheaper the EM. The advantage of stator–PM EMs over rotor–PM EMs is the absence of a centrifugal force acting to magnets. Paper [2] considers nontrivial methods of magnet fastening on an EM rotor with high rates of motion. Simplifying the manufacturing technology of a rotor of an EM with a PM on the stator leads to decreasing the EM net cost. Paper [1] gives a review of existing structures of an EM with a PM on the stator. One structure is a machine with flux switching (a fluxswitching machine (FSM)). Figure 1 shows a schematic sketch of the structure of such machine [1, 3]. Methods for designing FSMs of the required scale with specified initial values of power, the speed on the shaft, and optimal characteristics of EM are still absent. The development of such techniques is impossible with out complex theoretical analysis of such EMs. The present paper describes the dynamic mathe matical model with using the finiteelement method. Although the model requires great numerical resources, it allows one to model highly dynamic tran sient processes in EMs with arbitrary control algo rithms and currents (voltages) on the EM and take into account the geometrical features of the machine in detail, the saturation, and the energy dissipation in magnets and steel. Moreover, software based on the FEMs visualizes the structure and simplifies develop ment of the assembly documentation for the EM design. ASSUMPTIONS FORMING THE BASIS FOR THE MATHEMATICAL MODEL The given model is based on traditional assump tions, including quasistationarity of the electromag netic field, homogeneity of the media of EMs along the z axis (the rotation axis of the rotor shaft), orienta tion of the currents along the z axis, plane parallelism of the magnet field, and uniform distribution of slot ting currents over the conducting parts of slots. Let us consider two variants of the model. In the first, the magnets are electrically insulated from mag 126 +C +A Permanent magnets –A –B –C +B –B +C +B x y –C Rotor +A –A –A +A +B –C –B +C z +B –C +C –B –A Fig. 1. +A Stator A FINITE ELEMENT MODEL OF ELECTRIC MACHINE netic circuits. In the second, there is an electrical con tact between magnetic circuits and magnets, which leads the magnets to the closed electric circuit in the form of a squirrelcage of the induction motor. Note that the electric field in the case of insulation of mag nets from the magnetic circuits has a component of electric field that is heterogeneous along the z axis in the transverse plane. CONSTITUTIVE EQUATION FOR DIFFERENT MEDIA OF A MOTOR The constitutive equations in the form of depen dences of the magnetic field strength on the magnetic induction H(B) and the z component of the current density on the z component of the electric field strength Jz(Ez) for each subdomain have special fea tures. However, these relationships can be unified to describe the partial differential equation uniformly for all subdomains within the calculation domain. In the reference system related to the medium, the unified relationship Jz(Ez) showing the absence of the current in the laminated magnetic circuit and the air, the uniform current distribution over the conducting parts of the stator slots, and the linear Ohm’s law for the vortex current magnets is e J z = σE z + J z , 127 sion approximating the relationship between μ and B for numerical calculations. The expression from [5] μ(0) μ = 1 + , 2 n 1 + a ( 0.1 + B ) where μ0, a, and n are selected to minimize the differ ence between the values of μ–1 according to the mag netization curves for the given electric steel, is applied upon program implementation of the described model. In the magnetic circuits, Br is the vector describing the steel losses. Assume that the magnet losses in steel are prescribed by the expression B⎞ , P st = α ⎛ ∂ ⎝ ∂t ⎠ 2 B. B = – αμμ 0 ∂ ∂t r e Jz where is the density of the uniformly distributed slot current, which is uniquely specified by the phase currents; σ is the electrical conduction. n ⎛ f⎞ ⎝ 50⎠ α = ρP , 2 ( 2πf ) (6) is used in the present paper. This provides coincidence between the fundamental harmonic of (4) and the given expression for calculating the steel losses [4]: n 2 P st = ρP ⎛ f⎞ B , ⎝ 50⎠ r B–B H = , μμ 0 (2) where μ is the magnetic permeability; Br is the vector taking the nonzero value in the domains of magnets and magnetic circuits. In this case, the physical mean ing of the vector Br is different in these domains. For all nonmagnetic media (air and the conducting domains of the slot), we assume that μ = 1 and Br = 0. For magnets NdFeB, μ = 1, while Br is the vector of residual induction. For the magnetic circuits, the magnetic permeabil ity is stated by the main curve magnetization curve μ = B/(μ0H) [4] and depends on the magnetic induction module. There is a need to have an analytical expres RUSSIAN ELECTRICAL ENGINEERING (5) The expression e The relationship H(B) can be written in the form (4) where α is the proportionality coefficient defined based on empirical formulas. As is known, the volume density of the work per unit time over the change in the magnetic induction is r ∂B B ∂B B ∂B H , or, taking (2) into account, – . μμ 0 ∂t ∂t μμ 0 ∂t r The summand containing B needs to coincide with (4). Then, (1) It is taken that Jz = 0 or σ = 0, J z = 0, for the air and magnetic circuits. To take the losses due to vortex current in magnets into account, σ is given according e to the reference data, J z = 0. For the conducting parts of the slot, σ = 0. (3) Vol. 83 (7) where ρ is the steel density; P are the losses per 1 kg of steel at the frequency 50 Hz and actual value of induc tion 1 T; f is the frequency; and n is the parameter, which is n = 1, 3 for the majority of dynamo steels. GAGE SELECTION It is known that the plane parallel magnetic field can be described by a vector potential having only one zindependent component Az, No. 3 ∂A z B x = ; ∂y 2012 ∂A z B y = – . ∂x (8) 128 DMITRIEVSKII et al. Since the conduction of the magnets is described by the σ coefficient, the electric field strength for them ∂A is E = – – ∇ϕ, where ϕ is the scalar potential. ∂t The requirement to the parallelism of currents of ∂ϕ ∂ϕ the z axis is met if = = 0 within the media with ∂x ∂y the electric conduction described by σ. This means that the z component of the potential electric field E 0 = –∂ϕ/∂z within the magnet does not depend on x and y and ∂A 0 E z = – z + E . ∂t (10) If the magnets are electrically insulated from the stator and have a dielectric coating, E0 is different for each magnet. Thus, the electromagnetic field in the chosen gage is specified by the field variable Az and 0 The coordinate system related to domain II is not inertial. However, the Maxwell equations in quasista tionary approximation are invariant with respect to the transition into the rotating coordinate system. EQUATIONS FOR THE VARIABLES SPECIFYING THE ELECTRIC FIELD Equations (1) and (2) are matched by the equation for the field variable Az: ∂A e 0 ∂ ⎛ 1 ∂A z⎞ σ ⎛ – z + E ⎞ + J z = – ⎝ ∂t ⎠ ∂x ⎝ μμ 0 ∂x ⎠ r r B By ∂ 1 ∂A ∂ – ⎛ z⎞ – + ∂ x. ∂y ⎝ μμ 0 ∂y ⎠ ∂x μμ 0 ∂y μμ 0 (12) 0 additional ordinary variables E 1 , …, E Nm as values for each magnet (Nm is the number of magnets). If the magnets are not insulated, E 0 is the same for all magnets, E 0 = 0, and the electromagnetic field is thus specified by only the field variable Az. MODELING THE ROTATION OF THE ROTOR ABOUT THE STATOR When the solids move relative to each other, the calculation domain can be divided into subdomains where the timedependent joint condition is specified at the common boundary. This technique for modeling forward motion in a linear induction motor is consid ered in [6]. For modeling of the rotation, the calculation domain is divided into two domains by circle passing through the center of the nonmagnetic gap: domain I includes the area of the stator and half of the air gap; domain II includes the area of rotor and the other half of the air gap. Each domain is considered in the asso ciated reference system. Joining of the component of vector of magnetic potential Az was fulfilled at the common boundary of domains I and II. The independent degrees of freedom at the boundary of domains are the values of Az in domain I. These values in the point (x, y) prescribe the value of Az in the point on the boundary of domain II with coordinates x' = x cos θ + y sin θ ; mal derivatives of Az is automatically performed by finite element method. y' = – x sin θ + y cos θ, (11) where θ is the rotation angle of the rotor about the sta tor. The points (x', y') at the boundary of domain II are not necessarily the discretization points. The value of Az in the discretization points of domain II is stated by means of polynomial interpolation. Joining of the nor If magnets are insulated from the magnetic circuit, this partial differential equation should be added by Nm algebraic equations due to the presence of the 0 0 additional variables E 1 , …, E Nm . These equations express the equality of current flowing through the magnet cross section to zero: ∫∫J = 0, z (13) Ω iM where ΩiM are the domains corresponding to magnets. CALCULATION OF THE THRUST MOMENT The voltage integration is a method for calculating the torque. To increase the accuracy of finite element methods, the surface gap instead of curvilinear inte gral over the line is calculated throughout the whole domain [7]: 2 M = L ∫∫ Ω air 2 2 2 xy ( B y – B x ) + ( x – y )B x B y dS, 2 2 δ air μ 0 x + y (14) where Ωair is the domain of the air gap, which is limited by circles of the rotor and stator surfaces; δair is the thickness of the air gap; and L is the length of the machine. THE EQUILIBRIUM EQUATION OF THE ELECTRIC CIRCUIT The equilibrium equation of the electric circuit at a series connection of coils in the phase has the form U i + EMF i = rI i , RUSSIAN ELECTRICAL ENGINEERING Vol. 83 (15) No. 3 2012 A FINITE ELEMENT MODEL OF ELECTRIC MACHINE where Ui is the voltage (lateral emf) of the ith phase; EMFi is the electromotive force; r is the phase resis tance; − EMF i = NL + S k(i) ∂A dS, ∑ ∫ ∫ ∂t (16) The initial state of the magnet field is described by the equation obtained from (11) by substituting E0 = 0 ∂A and z = 0: ∂t e ∂ 1 ∂A ∂ 1 ∂A J z = – ⎛ z⎞ – ⎛ z⎞ ∂x ⎝ μμ 0 ∂x ⎠ ∂y ⎝ μμ 0 ∂y ⎠ Ωk where L is the length of the stator pack (z coordinate); and N is the number of vortices in the slot side of coil. Summing in expression (16) is carried out over the domains corresponding to the conducting parts of the slot Ωk relative to the phase i and the negative and pos itive signs are selected for arbitrarily positive and neg ative domains. Upon dynamic modeling of the FSM as a part of electrical drive, the equations of the FSM model are complemented by the motion equation of the mobile part, which determines the rotation angle θ and the · angular velocity Ω = θ and the control system equa tions that define the controls Ui or Ii. FORMULATION AND SOLUTION OF THE CAUCHY PROBLEM To find the unique solution, the model equation needs to be supplemented by initial and boundary conditions. The absence of the field at the boundary of the cal culation domain Az = 0 is conveniently considered as the boundary condition. The calculation domain nec essarily contains the air adjacent to motor, in which some of the magnet fluxes are closed. The initial conditions are the value of field Az and the additional degrees of freedom V1, …, V Nm in the initial time, when the magnets are insulated from the magnetic circuit. For correct formulation of the Cauchy problem, the state in which the degrees of freedom do not depend on the history of system and can be directly calculated on the basis of solving the stationary problem should be taken as the initial time. During the rotor rotation, dissipative processes in steel and magnets containing derivatives with respect to time occur even under open winding. These pro cesses exist when there is alternating current flowing through the stator winding as well. Therefore, the state with a stationary rotor and steady currents in windings can only be selected for the initial time. Due to the stationary of state of the initial time, emf is absent in magnets, wherein current does not flow, and, then, the potential component of the elec tric field 0 Ei = 0 (17) does not exist. RUSSIAN ELECTRICAL ENGINEERING Vol. 83 129 r (18) r Bx ∂ B ∂ – y + . ∂x μμ 0 ∂y μμ 0 e Here, J z is specified according to (15), and Ui = rIi due to the absence of emf. Based on the described mathematical model, the program complex for modeling the transient processes in the stator–PM EM using the finite element method is developed. AN EXAMPLE OF CALCULATION RESULTS. THE LOADING OPERATION In order to demonstrate the possibilities of the model, the test calculation of the generator mode of FSM in which the power supply terminals were con nected with resistors by the circuit “star coupler with common wire” was carried out. The motion of the rotor was taken to be uniformly accelerated with the angular acceleration ε = 377 rad/s2 corresponding to 60 rpm. Then, U i = – r load I i ; ω = εt; 2 . θ = εt 2 (19) The first relationship allows one to exclude Ui from (15), while the field of the component of vector poten tial Az and phase currents turned out to be independent 0 0 variables under insulation of magnets E 1 , …, E Nm . Geometry of FSM The external radius of stator is 0.13 m The coefficient of filling the slot kz by winding is 0.45 The load resistance rload is 4.23 Ω The residual magnetic induction Br is 1.33 T The air gap is 0.75 mm The specific resistance of the magnets is 1.4 × 106 Ω m The length of the stator pack (z coordinate) is 0.2 m The steel grade is ST 2013 The load resistance is ten times higher than the winding resistance. Consequently, the useful power is only 91% of the power of the electric circuit of machine, while the loss in winding is 9%. Figure 2 shows the resultant relationships between the time and instantaneous mechanical power (a), torque (b), losses in magnets and magnet circuits No. 3 2012 130 DMITRIEVSKII et al. Power, W 14000 Torque, N m (a) (b) 250 12000 200 10000 150 8000 6000 100 4000 50 2000 0 0.04 0.08 Power, W 1400 0.12 0.16 0 Time, s 0.04 0.08 Power, W 0.10 (c) 0.12 0.16 Time, s (d) 0.09 1200 0.08 1000 0.07 800 0.06 2 2 0.05 600 0.04 0.03 400 0.02 1 200 0 3 3 0.04 0.08 0.01 0.12 0.16 Time, s Current, A 80 60 1 0 0.04 0.08 0.12 0.16 Time, s 0.12 0.16 Time, s (e) Phase C 40 Phase B Phase A 20 0 –20 –40 –60 –80 0 0.04 0.08 Fig. 2. RUSSIAN ELECTRICAL ENGINEERING Vol. 83 No. 3 2012 A FINITE ELEMENT MODEL OF ELECTRIC MACHINE (c, curve 1), the portions of these losses of the instan taneous power (d, curve 1), and the phase currents (e). Curves 1 in Figs. 2a–2d are given for the case of insu lated magnets. Curves 2 in Figs. 2c and 2d characterize losses in magnets in the presence of an electric con tact, while curves 3 in Figs. 2c and 2d define the losses in magnetic circuits. The proposed model allows one to calculate the pulsation character of power, torque, and other values. The power oscillations are evident in Figs. 2a and 2b. From Figs. 2c and 2d, it follows that the losses in steel exceed the losses in magnets at a low rotation fre quency and vice versa at a high one. In the final period (at rotation frequency 12 rps and current frequency 264 Hz), the steel losses under magnet insulation are 14% of mechanical power and the magnet losses are 1.7%. With the presence of a contact between the mag nets and magnetic circuit, the losses in magnets are 9% of the mechanical power, i.e., they increase by five times. Therefore, magnet insulation at high rotation frequencies results in a considerable increase in losses. However, since there is a squared relationship between the losses in magnets and the frequency of the low speed EM, the losses in magnets turn out to be insig nificant even under the presence of a contact with the magnetic circuit. RUSSIAN ELECTRICAL ENGINEERING Vol. 83 131 The mathematical model presented and the devel oped program complex for calculating the EM’s char acteristics can be applied to the EM design. REFERENCES 1. Ming Cheng, Wei Hua, Xiaoyong Zhu, et al., Stator– Permanent Magnet Brushless Machines: Concepts, Developments and Applications, Proc. 11th Int. Conf. on Electrical Machines and Systems, ICEMS 2008, Wuhan, 2008, pp. 2802–2807. 2. Sitin, D.A., Magnetic Systems for Synchronous Elec tric Machines with Rare–Earth Permanent Magnets and Increased Rotation Speed, Cand. Sci. (Eng.) Dis sertation, Moscow, 2009. 3. European Patent EP 2 169 804 A2. 4. Kopylov, I.P., Proektirovanie elektricheskikh mashin (Electric Machines Design), Moscow: Energiya, 1980. 5. Prakht, V.A., Sarapulov, F.N., and Dmitrievskii, V.A., Computer Simulation of AC Converter–Fed Induction Motor with Permanent Magnets, Distantsionnoe Vir tual’noe Obuchenie, 2010, no. 10, pp. 38–46. 6. Dmitrievskii, V.A., Research of the Induction Machines with Open Magnetic Circuit on the Base of Field and Circuit Theories, Cand. Sci. (Eng.) Disserta tion, Yekaterinburg, 2007. 7. Rymsha, V.V., Radimov, I.N., and Poraiko, A.S., Elek tromashinostroen. Elektrooborudovanie, 2003, issue 60, pp. 35–38. No. 3 2012