Dynamics of a large system of coupled nonlinear oscillators
advertisement

Physica D 52 (1991) 293 331
North-Holland
Dynamics of a large system of coupled nonlinear oscillators
Paul C. M a t t h e w s ~l"~, R e n a t o E. Mirollo b and S t e v e n H. S t r o g a t z ~
'~Department of Mathematics, MIT, Cambridge, MA 02139, USA
hDepartment of Mathematics, Boston College, Chestnut Hill, MA 02167, USA
Received 8 September 1990
Revised manuscript received 10 February 1991
Accepted 10 February 1991
Communicated by A.T. Winfree
We consider the interaction of a large number of limit-cycle oscillators with linear, all-to-all coupling and a distribution
of natural frequencies. The system exhibits extremely rich dynamics as the coupling strength and the width of the frequency
distribution are varied. We find a variety of steady behaviors that can be described by a stationary distribution in phase
space: frequency locking, amplitude death, incoherence and partial locking. An unexpected result is that the system can also
exhibit unsteady behavior, in which the phase space distribution evolves periodically, quasiperiodically or even chaotically.
The simple form of the model allows us to derive several analytical results. The stability boundaries of amplitude death and
incoherence are found explicitly. Rigorous results on the existence and stability of frequency locking are also obtained.
1. Introduction
In recent years there have been great advances in our understanding of low-dimensional dynamical
systems [3, 14, 30]. An outstanding challenge for current and future research is the analysis of dynamical
systems with many degrees of freedom. Such systems are known to exhibit interesting cooperative
behavior and pattern formation, but unfortunately they are extremely difficult to analyze. One promising
approach is to consider the dynamics of coupled systems made of many simple subunits whose properties
we do understand. For example, this is the strategy behind recent studies of cellular automata [42, 45]
and coupled maps [8, 41].
In this paper we are concerned with a simple model of coupled nonlinear oscillators. Although
nonlinear oscillators are one of the oldest and best understood types of dynamical systems, surprisingly
little is known about their collectiL,e behavior. The issue is of more than just theoretical interest, for large
systems of nonlinear oscillators can be found in practically every branch of science, ranging from physics
[13, 15, 20, 34, 35, 41] to biology [7, 17, 25, 27, 33, 39, 40, 43, 44]. Our goal is to identify and understand
the new kinds of collective phenomena which can occur in populations of oscillators.
In the particular model we study here, the natural frequencies of the oscillators are assumed to be
randomly distributed across the population. This assumption is inspired by examples in biology, such as
populations of interacting heart ceils or fireflies, in which a distribution of natural frequencies is
inevitable [43, 44]. In spite of the frequency differences, populations of biological oscillators often
spontaneously synchronize to a common frequency [27]. Dramatic examples include the spontaneous
emergence of synchronous flashing in swarms of fireflies [7], crickets that chirp in unison [33, 40],
epileptic seizures [39] and menstrual synchrony among women [25].
iPresent address: D e p a r t m e n t of Applied Mathematics and Theoretical Physics, Silver St., Cambridge CB3 9EW, UK.
0167-2789/91/$03.50 © 1991 - E l s e v i e r Science Publishers B.V. (North-Holland)
294
P.C. Matthews et al. /Dynamics of coupled oscillators
One of the earliest models of collective synchronization was proposed by Winfree [43]. He rendered
the problem tractable by assuming that the oscillators were weakly c o u p l e d - h e r e "weakly" means
relative to the attractiveness of the limit cycles. Then the dominant effect of the coupling is to influence
the motion of each oscillator around its limit cycle, without affecting its amplitude. Thus in the limit of
weak coupling, only phase variations need be considered. The main result of Winfree's work was that
synchronization is a cooperative phenomenon: the oscillators spontaneously synchronized once the
coupling strength exceeded a certain threshold. Kuramoto [19, 20] reformulated this "phase model" and
gave a beautiful mathematical analysis of spontaneous synchronization in the limit of an infinite number
of oscillators. His techniques involved a novel dynamical extension of mean-field theory from statistical
physics.
In the phase model studied by Winfree and Kuramoto, three different types of collective behavior arc
observed: (1) I n c o h e r e n c e - all the oscillators run at their natural frequencies. This occurs if the coupling
is weak, relative to the spread of natural frequencies. (2) Locking - the phase difference between any two
oscillators is constant in time. This occurs if the coupling is very strong relative to the spread of natural
frequencies. (3) Partial l o c k i n g - s o m e of the oscillators are locked, while the others drift at different
frequencies. This state is intermediate between locking and incoherence. All of these types of behavior
are statistically steady in the sense that they can be characterized by a stationary distribution in phase
space.
In this paper we generalize the phase model by allowing the oscillators to undergo amplitude
variations. This turns out to open up a Pandora's box of collective phenomena. The main new finding is
that the system can exhibit unsteady behavior, in addition to the steady behaviors described above.
Fortunately the model is simple enough that we can derive several of the curves in parameter space that
separate steady from unsteady behavior.
The organization of this paper is as follows. The equations for the model are given in section 2. In
section 3 we describe the different types of collective behavior seen in our numerical simulations. Our
analytical results are presented in sections 4-7. In view of the length of the paper, a summary of results
is given in section 8. The reader may find it helpful to consult this summary while reading the body of the
paper. The remainder of section 8 compares our work to previous studies and indicates directions for
future research.
A brief report of some of our results has been given elsewhere [24].
2. The model
For the individual components of our model we use simple limit-cycle oscillators governed by the
equation
dzi
dt - ( 1 - l z J l
2+
iwj)Zj
(2.1)
where z i is the position of the jth oscillator in the complex plane. Each oscillator has a stable limit cycle
at Izj[= 1 on which it moves at its natural frequency %. Eq. (2.1) is simply the normal form for a
supercritical H o p f bifurcation [3, 14], neglecting the term corresponding to amplitude-dependent
frequency. Note that we have scaled zj and t so that the limit cycle is the unit circle and the growth rate
for the instability of the origin is 1.
P. C. Matthews et al. / Dynamics of coupled oscillators
295
We consider N oscillators of the form (2.1), with a linear, all-to-all coupling:
dzj _ (1 - I z j ] 2
K N
dt
+ io2j)zj + ~ ~ ( z i - z j ) ,
(2.2)
i=1
where K is the coupling strength. By defining the centroid of the oscillators,
1
2= ~
N
~ zj,
(2.3)
j=l
we can write the system (2.2) as
dzj _ (1 - I z j l 2 + io)~)zj + K ( - ~ - z ~ ) .
dt
(2.4)
Thus we can think of the coupling either as being between any two oscillators, or as being between each
oscillator and the centroid. This latter approach is similar to mean field theory in statistical physics.
The centroid is often referred to as the 'order parameter', because it provides a useful measure of the
degree of synchronization of the system. It is also a very useful macroscopic indicator of the system's
microscopic behavior. We can define the amplitude and phase of the order p a r a m e t e r by
_Y=Re i'b,
(2.5)
which enables (2.4) to be written in polar form
++: ( 1 - r / -
K)r+ +
cos(
Oj =o)j + ( KR/rj)sin( oS - Oj).
-
(2.6)
(2.7)
We are interested in the limit N --* oo. The frequencies wj are assumed to be randomly selected from a
frequency distribution g(w). Note that it can be assumed that the sample mean of o) is zero: if the mean
of o) is w, o) 4= 0, we can go into a rotating frame by defining z~. = z~ e i~t and then the equations for z}
are identical to (2.2) with zero mean frequency. We assume that g(o)) is symmetric and non-increasing
on [0, oo).
For any particular frequency distribution, the model has two parameters: the coupling strength K and
the width of the frequency distribution g(w). We will use the p a r a m e t e r a = 1 / w g ( 0 ) to measure the
width of g(w). Although this may seem an unnatural choice, it has two important advantages over other
measures of the width such as O)max or the standard deviation or. Firstly, many of the bifurcation
boundaries of the system (2.2) depend explicitly on the p a r a m e t e r g(0) (see sections 4-7). Thus with this
choice of p a r a m e t e r the behavior of the system as a function of K and a is similar for different g(w).
Secondly, the p a r a m e t e r A exists for all g(w). For some frequency distributions which we may wish to
consider, for example the Lorentzian distribution, O)max and ~r are not finite. Our aim in this p a p e r is to
determine the behavior of the system (2.2) for all values of K and A, using a combination of analytical
and numerical methods.
There is a simple limiting case of our model which is well understood [9-11, 18-22, 28, 36-38]. In the
limit of weak coupling and narrowly distributed frequencies, all the oscillators approach the unit circle
P.C. Matthews et al. /Dynamics of coupled oscillators"
296
Table 1
The four frequency distributions used in the numerical simulations.
Frequency
distribution
Formula for g(w)
Equation for w i, j
Uniform
l/'rrk
0
[(2j
Triangle
(rrA-)oJ[)/,rr2A 2
for Iw[< vA
[{2(j-I)/(N-I)
0
for ko[>lrA
[1- {2(N
for I~ol<~a/2
for Iw] > teA~2
Gaussian
( 1/vA
Lorentzian
A / w ( w 2 + k 2)
) e x p ( - o) 2/,-c:-12 )
N
= 1 .....
I)/(N-
N
l)]('rrk/2)
-l]'rrd
j)/(N-1)],'zA
{vvAerf t[(2j
N - 1)/(N+ 1)]
Atan[(vr/2)(2j
N
forj<(N+
1)/2
for j > ( N + 1)/2
I ) / ( N + l)]
and the system becomes the 'phase model' discussed in section 1. To see this explicitly, suppose the
width of the frequency distribution A is small. Then we introduce rescaled quantities K ' = K / A ,
co' = c o ~ A , t' = t A and take the limit A -+ 0, which yields the phase model equations
d0j
,
K' x
d t ' = coJ + N - ~ s i n ( 0 / - 0j).
(2.8)
i=1
Note that this model only has one parameter, K', since we have used k in the rescaling.
3. Numerical results
We begin by describing the results of a numerical study of our model. In the following sections we first
explain the numerical methods used, and then list the types of behavior observed, with appropriate
figures. Then we give diagrams indicating where in the K, d parameter space each type of behavior was
found.
The computations were carried out using a fourth-order R u n g e - K u t t a method with a timestep of 0.25.
Several of the results were checked with a timestep of 0.125. The number of oscillators used was 800. It
was found that no qualitative differences appeared when the number of oscillators was increased to 3200.
Four different frequency distributions were investigated. Each of these can be expressed in terms of
their characteristic width, a = 1/wg(0). Table 1 gives the formulae for g(co) and the values for coj for
each of the distributions.
Three different types of initial condition were used: (a) a random distribution in the square Ix] < 1,
[yl < 1; (b) all the oscillators at x = 1, y = 0; (c) a random distribution on the circle Izl 2 = 1 - K. In
almost all cases it was found that the long-term behavior of the system was not dependent on the initial
conditions; the few exceptions are discussed in section 3.10 below.
We now describe the main types of behavior exhibited by the system, in order of increasing complexity.
The first four categories of behavior (sections 3.1-3.4) all have the property that the system evolves to a
statistically steady state: the distribution of oscillators in the complex plane is constant in time. In
sections 3.5-3.9, we describe states in which the long-term behavior of the system is unsteady: the
distribution of oscillators does not approach a stationary state as t - ~ oo. In particular, the order
parameter (the centroid of the distribution) is strongly time-dependent.
P.C. Matthews et al. / Dynamics of coupled oscillators
297
3.1. Amplitude death
The origin zj = 0 Vj is a fixed point of (2.2) for all values of the coupling strength K and the spread of
natural frequencies /t. For fixed K > 1, and A sufficiently large, it is a stable fixed point. Then the
oscillators pull each other off their limit cycles and collapse into the origin as t ~ ~. Since the amplitude
of all the oscillators is then zero, this state is referred to as 'amplitude death'.
3.2. Frequency locking
As discussed in section 1, oscillating systems with different natural frequencies can often synchronize
to a common frequency, a state which we shall refer to as 'frequency locking'. In our numerical
simulations, locking only occurs at the mean frequency ~. For simplicity, we have chosen a rotating
frame in which this mean frequency is zero, so the state of frequency locking corresponds to a fixed point
of our system.
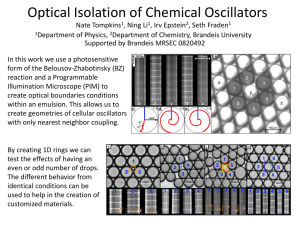
Fig. 1 shows an example of spontaneous synchronization starting from a random initial condition. The
order p a r a m e t e r for the system is initially close to the origin; from (2.4), this means that the system acts
as if it were uncoupled. Each oscillator therefore moves toward a circle of radius fi- - K ; this is shown at
time t = 2. The symmetry of the system breaks near t = 4. By t = 6 the system is strongly ordered, as
shown both by the distance of the centroid from the origin, and the clustering of oscillators. The locked
state is almost reached by t = 8 except for some slow adjustments of relative phases. Fig. 2 shows the
same phenomenon by plotting the evolution of R, the amplitude of the centroid.
Fig. 3 shows a typical locked state in the complex plane. The phase ~b of the order p a r a m e t e r is
arbitrary, because of the rotational symmetry of the governing equations; we have chosen 4~ = 0. The
oscillators form a stationary arc, in which the oscillators with the most extreme natural frequencies are at
the ends of the arc and closest to the origin. In the original frame with non-zero mean frequency, this
means that the oscillators with largest natural frequency have a phase lead, while those with the lowest
natural frequency have a phase lag, relative to the other oscillators. (This type of frequency locking with
a phase lag depending on the difference in natural frequency has been observed in experiments with
fireflies [7] and crickets [40].) Furthermore the oscillators with the most extreme frequencies have the
lowest amplitude. Fig. 4 shows the real part of the amplitude of three oscillators as a function of time in
this state, to illustrate this effect. We have chosen an arbitrary mean frequency for this figure, but the
phase difference between oscillators is independent of this choice.
3.3. Incoherence
For fixed A, and K sufficiently small, an 'incoherent' state is found, in which each oscillator moves at
its own natural frequency on the circle Iz] 2 = 1 - K. In this incoherent state, the order p a r a m e t e r of the
oscillators is at the origin. The oscillators act as if uncoupled as far as their frequency is concerned, but
the coupling reduces the amplitude of the individual limit cycles from 1 to ~ / 1 - K . Geometrically
speaking, the motion of the entire system is ergodic on an N-dimensional torus.
Strictly speaking, this state only exists in the limit N ~ ~. For finite N, the magnitude of the order
p a r a m e t e r R undergoes statistical fluctuations of order N ~/2, as shown in fig. 5. This means that it is
difficult to determine precisely the boundary of the region of incoherence; this point is discussed in more
detail in section 3.10 below.
298
P.C. Matthews et al. / Dynamics of coupled oscillators
t=0
t=2
1
I
05 - "*
0.5
***
*
* *
0
-0.5
-0.5
-1
-1
J
i*
i
-0.5
0
0.5
s
-1
-1
,
L
J
-0.5
0.5
t=4
t=6
1
1
°if-oIi
m ** %
0.5
o *
It
.#
?"
:..
* **
*
B* •
-0.5
-1
-0.5
-1
'
0
L
'
0.5
-o.5
-1
o
o15
X
t=10
t=8
1
1
S,
',a'
"~,%.
X
0.5
!
0.5
¢
0
-0.5
-1
-1
-0.5
i
i
i
-0.5
0
0.5
X
-1
-1
i
i
i
-0.5
0
0.5
X
Fig. 1. Spontaneous synchronization from a random initial condition ( K = 0.8, J = 0.4, g(~o)= uniform distribution). The state of
the system in the complex plane is shown at six times, at intervals of 2 time units. 40 of the 800 oscillators are shown. The centroid
is represented by a large asterisk.
P.C. Matthews et al. / Dynamics of coupled oscillators
299
(1.8
0.6
0.4
0.2
0.8
0
0.6
.......
-0.2
R
0.4
-0.4 t
0.2
0
0
f
I
I
I
20
40
60
80
-0.4
100
-0.2
0
0.2
time
0.4
0.6
0.8
1
.2
X
Fig. 2. Evolution of the order parameter amplitude R from a
random initial condition to the locked state ( K = 0.8, A = 0.38,
uniform distribution).
Fig. 3. A typical locked state ( K = 0 . 8 , A =0.4, uniform
distribution). 40 of the 800 oscillators are shown. The centroid
is represented by a large asterisk.
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-I
i
0
1
2
3
4
5
L
;
7
8
9
10
time
Fig. 4. The real part of the motion of three of the oscillators in fig. 3, with an arbitrary mean frequency added. The curve with the
largest amplitude (solid line) represents the oscillator with the mean frequency, and the dashed curves correspond to oscillators
whose natural frequencies lie, an equal distance to either side of the mean.
P.C. Matthews et al. /Dynamics qf coupled oscillators
300
0.8
0.6
R
0.4
0.2
0
,
0
I
,
20
i
,
40
i
,
60
i
Fig. 5. Evolution of the order parameter amplitude R from a
random initial condition to an incoherent state (K=0.8,
A = 0.76, uniform distribution).
,
80
100
time
10-5
10 6
10 -v
10 4
10-9
10 10
10 u
10-12
10 13
10 14 q
10 ~5
0
i
0.2
i
i
0.4 " 0.6
i
i
0.8
1
i
1.2
1.4
~
1.6
i
1.8
2
frequency
Fig. 6. Power spectrum of the time series of the real part of the order parameter for a typical incoherent state (K = 0.8, A = 0.8,
uniform distribution). Note that the power is shown on a logarithmic scale and has arbitrary units.
T h e i n c o h e r e n t state is c h a r a c t e r i z e d by a flat p o w e r s p e c t r u m : Fig. 6 shows the p o w e r s p e c t r u m of the
time series of the real part of the o r d e r p a r a m e t e r , for a typical i n c o h e r e n t state for the u n i f o r m
distribution. N o t i c e that the s p e c t r u m is flat over the r an g e of natural f r e q u e n c i e s of the oscillators and
then falls off sharply.
3.4. Partial locking
In the partially locked state, the oscillators split into two qualitatively different populations. T h e
oscillators with absolute f r e q u e n c y less than s o m e critical v al u e are locked and f o r m an arc in the
c o m p l e x p l an e similar to that of the locked state. Each oscillator with a natural f r e q u e n c y o u t si d e this
ran g e moves on an almost circular limit cycle at a f r e q u e n c y slightly lower than its natural frequency. T h e
o r d e r p a r a m e t e r is stationary and n o n - z e r o . Fig. 7 shows a partially locked state in the c o m p l e x planc.
F o r this state, the d i m e n s i o n of the a t t r a c t o r is roughly given by the n u m b e r of drifting oscillators.
P.C. Matthews et al. / Dynamics of coupled oscillators
301
0.8
0.6
+
0.4
%~
* **
0.2
•..***+*.,.%.
.g
*
0
-0.2
\
-0.4
/
••
-0.6
-0.8
-0.6
-0.4
-o2
0
012
i
i
04
o+
x
B
08
Fig. 7. A partially locked state showing the limit cycles of
four drifting oscillators and the fixed points of the locked
oscillators ( K - 0 . 8 , A - 0.42, Gaussian distribution). The
centroid is represented by a large asterisk.
3.5. Large-amplitude oscillations
In this and the following section, we discuss two types of collective behavior in which the N-dimensional dynamics collapse to motion along a stable one-dimensional limit cycle. Recall that (as always) we
are working in a frame rotating with the mean frequency of the microscopic oscillators; hence the
macroscopic oscillations discussed here correspond to modulated oscillations in the original frame.
In the first of these states, the centroid ~ = R e i+ undergoes large periodic oscillations along a line of
constant ~b in the complex plane. Without loss of generality, we set ~b = 0 when describing this state.
These oscillations may be symmetrical, as seen in fig. 8. Fig. 8a shows the real part of the order
p a r a m e t e r as a function of time. Fig. 8b shows a sequence of snapshots of the oscillators moving in the
complex plane, in the format of fig. 1. The centroid oscillates symmetrically along the real axis (fig. 8b).
When the centroid is at its maximum distance from the origin, the individual oscillators form a
configuration similar to that of the locked state. Each oscillator then moves by a circuitous path to the
diametrically opposite point in the complex plane.
Fig. 9 shows that large oscillations can also be asymmetrical. In this state, the centroid remains on one
side of the origin for most of the cycle (fig. 9b).
The frequency of these large-amplitude oscillations is typically somewhat lower than the width of the
frequency distribution. For the symmetrical oscillations shown in fig. 8, the frequency of the oscillation is
smaller than A by a factor of 3.
For the uniform distribution, large oscillations arise from a s a d d l e - n o d e bifurcation from the locked
state, which occurs for K < 1. This is evidenced in our numerical simulations by the characteristic scaling
[14] of the frequency close to the bifurcation: The frequency of the oscillation goes to zero as
(A - Ac) ~/2, where A c is the value of A at the s a d d l e - n o d e bifurcation.
3.6. Hopf oscillations about the locked state
Above the line K = 1, the locked solution loses stability via a H o p f bifurcation, leading to quasisinusoidal oscillations about the locked state. These oscillations have much smaller amplitude and
(a)
0.4
0.2
×
0
-0.2
-0.4
0
i
t
l
i
i
=
t
L
=
10
20
30
40
50
60
70
80
90
100
time
(b)
t=0
t=2
0.5
0
0.5
)
°
{
•
>',
-0.5
0
°
*
-0.5
i
0
t=4
t=6
0.5
0.5
°
*
0
•
i
°
, t %,
( " i'°
-0.5
-0.5
I
i
0
0
X
d
10
t=
t=8
0.5
0.5
),
•,
°:
* ,
,,,
t = 14
t=12
0.5
0.5
g.
.
,
0
**°
-0.5
:;:
-0.5
-0.5
>,
•
,j,*
i
t
•
0
*
*
°
-0.5
t
0
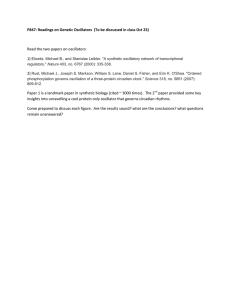
Fig. 8. Symmetrical large-amplitude oscillations (K = 1.0, A = 0.75, uniform distribution). (a) Time series of the real part X of the
order parameter. (b) The state of the system in the complex plane at eight times, at intervals of 2 time units. The entire sequence
shows half a cycle of the oscillation, after decay of transients. 40 of the 800 oscillators are shown. The centroid is represented by a
large asterisk.
0.8
(a)o. 6
0.4
x
0.2
0
-0.2
i
L
~
i
i
i
i
i
i
10
20
30
40
50
60
70
80
90
100
time
t=O
1
(b)
1
t=5
*******°
0.5
0.51
0
0
-0.5
-0.5
-1
-1
,.
**
°,
*
%°
o,"
=1
J
-1
t=10
0.5
*
0
1
. *
*
t = 15
0.5
0
I
%
0
...:::"
-0.5
-1
-1
q, ,~.
-0.5
-1
s
I
-1
0
x
t=20
1
t= 25
%
0.5
~.,
01
.~ ** ***
t
*
•
,~ ** ,
i
0
0.5 :"
0i
~0~5
-1
-1
%*
1
,
-0.5
*
*
,** "*
)
-1
0
1
0.5
t= 35
f
O:
*
*
~, ), ** • ,
-1
t = 30
1
1:'*
..
• °
-1-1
0
,:
*
-0.5
0.5
**********~
*
DO~5
°°'**,~° • °*
i
0
X
-1
0
X
Fig. 9. A s y m m e t r i c a l l a r g e - a m p l i t u d e oscillations ( K = 0.7, za = 0.42, u n i f o r m distribution). (a) T i m e series of the real part X of
the o r d e r p a r a m e t e r . (b) T h e state of the system in the c o m p l e x p l a n e at eight times, at intervals of 5 t i m e units. A l m o s t a whole
cycle of the oscillation is shown.
P. C Matthews el al. / Dynamics" of coupled oscillatorv
304
0.4 [
(b)
o
0.3 [
F
0.2 F
1.0
o.])
(a)
0.8
I
0.6
0.1
0.4
-(I.2
0.2
0.3
R
0.0
20
40
60
time
80
1O0
-0.4
-0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
(I.6
X
Fig. 10. Radial Hopf oscillations (K = 1.1, ,3 = 0.8, uniform distribution). (a) Evolution of the order pa ra me t e r amplitude R from
a random initial condition. (b) Trajectories of 10 of the 800 oscillators in the complex plane. Note that the centroid (large asterisk)
oscillates radially.
smoother waveform than the large-amplitude oscillations discussed above. They also differ from the
partially locked state in several ways: in H o p f oscillations, all of the oscillators move; all the oscillators
move at the same frequency; and the order p a r a m e t e r is not constant.
Over most of the region of p a r a m e t e r space where H o p f oscillations are found, the oscillations arc
such that the order p a r a m e t e r moves radially along the line of constant &. Fig. 10a shows the evolution
of the order p a r a m e t e r from a random initial condition. Fig. 10b shows the trajectories of some of the
oscillators and the order p a r a m e t e r after transients have decayed.
However, close to the point K = 1, A = 2 / 3 , H o p f oscillations are found in which the order parameter
moves transversely. Fig. 11 shows an example of this case.
3. 7. Chaos
For certain values of the parameters, the system behaves chaotically. Both the centroid (fig. 12) and
the individual oscillators move in an irregular manner in the complex plane. To show that this is indeed
chaos, we present three pieces of evidence:
(a) Exponential divergence of trajectories: To check the exponential divergence of nearby trajectories
associated with chaos we first allow the system to run for several hundred time units so that it is on its
attractor. We then introduce a small perturbation in the position of each of the oscillators and follow the
growth of this perturbation. Fig. 13 shows the characteristic exponential growth of the perturbation of
the centroid. The largest Lyapunov exponent is typically around 0.04. This was found to be independent
of the number of oscillators used in the simulation.
(b) Power spectrum: The power spectrum of the chaotic solution contains all frequencies and
decreases with frequency; this is a characteristic of chaotic motion [3, 30]. Fig. 14 shows the spectrum of
the real part of the order p a r a m e t e r for a typical chaotic state.
P.C. Matthews et al. / Dynamics of coupled oscillators
305
0.5
0.4
0.3
0.2
0.1
Ii
0
0.8
-0.1
0.6
R
-0.2
0.4
-0.3
0.2
-0.4
-0.5
-0.2
i
0
012
04
0.6
0
0.8
0
20
40
60
8()
100
time
X
Fig. 11. Transverse Hopf oscillations ( K = 1.0, A = 0.665,
uniform distribution). Trajectories of, 10 of the 800 oscillators
in the complex plane. In contrast to fig. 10, the centroid (large
asterisk) oscillates transversely.
Fig. 12. Evolution of the order parameter amplitude R from
a random initial condition to a chaotic state ( K = 0 . 8 ,
A = 0.64, uniform distribution).
103
100
10-3
t~
10 6
10-9
10-12
~ '
r
,
,
,
,
100
200
300
400
500
600
time
Fig. 13. Exponential divergence of trajectories for two slightly differential initial conditions. The separation measures the distance
between the respective centroids (K = 0.8, zl = 0.65, uniform distribution).
306
P.C. Matthews et ul. / Dynamites ~1'coupled oscillators
10 3
10 4
10 5
10 6
10 ~l
10 8
10 9
10 111
10 11
10 ~2
10 i:
i
~
i
k
i
J
i
i
I
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
frequency
Fig. 14. Power spectrum of the time series of the real part of the order parameter in the chaotic state (parameters as in fig. 13).
(c) R o u t e to chaos: T h e system exhibits both the classic p e r i o d - d o u b l i n g a n d q u a s i p e r i o d i c routes to
chaos [3, 30]. T h e s e a r e d e s c r i b e d in sections 3.8 and 3.9 below.
T h e b o u n d a r y b e t w e e n the chaotic and i n c o h e r e n t regions is r a t h e r difficult to d e t e r m i n e numerically,
p a r t i c u l a r l y w h e n the n u m b e r of oscillators is small, in which case the statistical N ~/2 m o t i o n a s s o c i a t e d
with i n c o h e r e n c e can be as large as the chaotic motion. W e can use the following tests to distinguish
chaos from i n c o h e r e n c e :
(i) T h e e x p o n e n t i a l d i v e r g e n c e is not o b s e r v e d in the i n c o h e r e n t state.
(ii) T h e s p e c t r a of the i n c o h e r e n t and chaotic states are quite different ( c o m p a r e figs. 6 a n d 14)
(iii) W h e n the n u m b e r of oscillators is i n c r e a s e d from 800 to 3200, the a m p l i t u d e of the m o t i o n of the
c e n t r o i d falls by a factor of two for the i n c o h e r e n t state but r e m a i n s c o n s t a n t for the c h a o t i c state.
O v e r most of the p a r a m e t e r r e g i m e for which the system b e h a v e s chaotically, both the a m p l i t u d e R
a n d the p h a s e & of the o r d e r p a r a m e t e r are chaotic. However, n e a r the onset of chaos, c h a o t i c states are
f o u n d in which ~ is constant.
3.8. Period-doubling route to chaos
F o r c e r t a i n values of the p a r a m e t e r s the F e i g e n b a u m [30] p e r i o d - d o u b l i n g r o u t e to chaos can be f o u n d
in the system. W e now d e s c r i b e in detail the r o u t e to chaos for the u n i f o r m d i s t r i b u t i o n for K = 1.05 as A
is i n c r e a s e d . F o r A = 0.87, the stable state is an a s y m m e t r i c l a r g e - a m p l i t u d e oscillation. This can bc
r e p r e s e n t e d as a p h a s e p l a n e d i a g r a m of d X / d t
against X, w h e r e X is the real p a r t of the o r d e r
p a r a m e t e r a n d we have set the c o n s t a n t a r b i t r a r y p h a s e & to z e r o (fig. 15a). As J is i n c r e a s e d , this limit
cycle u n d e r g o e s a p e r i o d d o u b l i n g s e q u e n c e : figs. 1 5 b - 1 5 d show the p e r i o d - 2 and p e r i o d - 4 solutions a n d
finally the chaotic a t t r a c t o r . T h e a t t r a c t o r a p p e a r s to be low-dimensional. M o r e o v e r , its d i m e n s i o n s e e m s
to be essentially i n d e p e n d e n t of the n u m b e r of oscillators used in the simulation.
A similar p e r i o d - d o u b l i n g s e q u e n c e was also f o u n d at K 0.5 as A is increased.
P.C. Matthews et al. /Dynamics of coupled oscillators
0.05
0.05
(a)
(b)
0.04
0.04
0.03
0.03
0.02
0.02
0.01
0.01
0
0
-0.01
-0.01
-0.02
-0.02
-0.03
-0.03
-0.04
-0.04
-0.05
-0.15
307
-0.1
-0.05
0
0.05
0.1
0.15
0.2
-0.05
-0.15
-(i.1
-0.'05
0
0.05
0~.I
0.'15
0.2
0o5
011
0.'15
02
X
0.05
0.05
(c)
(d)
0.O4
0.04
0.03
0.03
0.02
0.02
0.01
0.01
0
0
-0.01
-0.01
-0.O2
-0.02
-0.03
-0.03
-0.04
-0.04
-0.05
-0.15
J
-0.1
i
-0.'05
i
0
0.05
X
0.1
0.'15
0.2
-0.05
-O.l
i
-01
-005
i
0
X
Fig. 15. Period-doubling route to chaos ( K = 1.05, uniform distribution), indicated by phase plane diagrams of X against d X / d t ,
where X is the real part of the order parameter. (a) Stable limit cycle (A = 0.86); (b) p e r i o d 2 (A = 0.87); (c) p e r i o d 4 (A = 0.883);
(d) strange attractor ( a = 0.885).
3. 9. Quasiperiodic route to chaos
T h e route to chaos from the oscillatory solution was also studied in detail for K = 0.8. At A = 0.5181, a
H o p f bifurcation occurs from the oscillatory solution, leading to m o t i o n on a torus in phase space. Fig. 16
shows the s p e c t r u m of this type of solution, with a n e w frequency appearing in the s p e c t r u m at
A = 0.5182, shortly after the H o p f bifurcation has occurred. T h e n e w frequency in the spectrum d o e s not
308
P.C. Matthews et al. / Dynamics ql: coupled oscillators
10 3
100
10-3
10-6
] 0-9
10-12
10-15
l0
18
0
U
1
~
i
h
~
~
~
~
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
frequency
Fig. 16. Power spectrum of the real part of the order parameter shortly after the Hopf bifurcation to the quasiperiodic state
(K = 0.8, A = 0.52, uniform distribution). A second frequency appears in addition to the main frequency and its odd harmonics.
a p p e a r to be rationally related to the main frequency. A third frequency appears in the spectrum at
A = 0.5185, so that the motion is on a 3-torus in phase space. As ~1 is increased further, we do not
observe a fourth frequency before the system b e c o m e s chaotic. These results are consistent with the
R u e l l e - T a k e n s route to chaos [30], whereby a strange attractor is likely to a p p e a r when the system has
three frequencies.
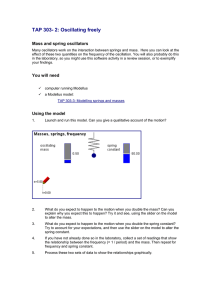
3.10. Phase diagram
We now present the phase diagram of the stable long-term behavior of the system as a function of the
coupling strength K and the frequency spread a for each of our four frequency distributions. We begin
with the results for the uniform distribution (fig. 17).
Fig. 17a shows a coarse view in which all the unsteady behaviors are g r o u p e d together. Stable locking
occurs when K is large c o m p a r e d with A, and incoherence occurs when A is large c o m p a r e d with K.
The system undergoes amplitude death when both K and A are large. T h e r e is a small cusp-shaped
region of partial locking between incoherence and locking, and the rest of the diagram corresponds to
unsteadiness.
Note that for small K and A the only behaviors observed are incoherence, partial locking and locking,
as found for the phase model [11, 20, 21]. T h e tangency between the locking and incoherence boundaries
is peculiar to the uniform distribution, as shown analytically in sections 6 and 7.7.
Fig. 17b shows the u p p e r part of the unsteady region in greater detail. For K < 1, the locked state
undergoes a s a d d l e - n o d e bifurcation to large-amplitude oscillations, while for K > 1 there is a H o p f
bifurcation to H o p f oscillations. The transition between oscillations and chaos can occur by either the
period-doubling or quasiperiodic route. In either case the transition region is thin and difficult to
determine precisely, so it is not shown in fig. 17b.
P.C. Matthews et al. / Dynamics of coupled oscillators
1.3
1.5
309
•
(b)
1.2
1.0
(a) L o c ~
eath__
1.1
K
K
0.5 / ~
Incoherence
Hopf
H, oscillations~
~
1.0
0.9
0.8
/ Partiallocking
0.00.0
0.5
i
1.0
A
1.5
0.70.4/
0.5
0.6
0.7
0.8
0.9
1.0
1.1
A
Fig. 17. Phase diagram for the uniform distribution. (a) Overview of five main regions. (b) Detail of upper part of the unsteady
region.
Two small regions of hysteresis were found, where two stable states co-exist. One hysteretic region is
along the incoherence boundary for 0.8 < K < 1, where both incoherence and chaos are stable. For
K = 0.8, the thickness of this region is about 0.02 in A. An even thinner hysteretic region is found along
the locking boundary near K = 0.5, where both frequency locking and large-amplitude oscillations are
locally stable.
Now we compare the phase diagrams for all four frequency distributions (table 1). Firstly, fig. 18a
shows the regions of stability of amplitude death and incoherence. All the boundaries can be obtained
analytically (see sections 5 and 6), and the analytical results were used to plot fig. 18a. The boundary
between amplitude death and incoherence is K = 1. The other boundary of amplitude death is a curve
which intersects the line K = 1 at zl = 1.
Remarkably, the boundary of the incoherent region is almost identical for all g(w). All the curves have
the same initial slope, and all pass through the point K = 1, A = 1. This is the main region for choosing
our p a r a m e t e r A = 1/nvg(0) as the measure of the width of the frequency distribution: with this choice,
the lines in fig. 18a are very similar even though the distributions g(w) are quite different.
We now discuss the remaining part of the phase diagram, beginning with the properties which are
common to all four frequency distributions. Frequency locking occurs over most of the region to the left
of amplitude death for K > 1. However, a small region of unsteady behavior protrudes for K just greater
than 1 and 2 / 3 < A < 1. As K is decreased through this unsteady region, the system exhibits H o p f
oscillations, symmetrical large-amplitude oscillations and chaos. Fig. 18b shows the position of the H o p f
bifurcation from frequency locking to H o p f oscillations for each of the four distributions. Note that these
curves all pass through the point K = 1, A = 1, as do the boundaries of amplitude death and incoherence
described above.
In contrast, the behavior of the system depends very much on the frequency distribution g(~o) for
K < 1 and to the left of the region of incoherence. For frequency distributions which cut off at some
finite frequency, such as the uniform and triangle distributions, frequency locking is observed for small
A. However for distributions with infinite 'tails', such as the Gaussian and Lorentzian distributions,
partial locking occurs i n s t e a d - t h e oscillators with the most extreme frequencies are unable to lock
stably. (This result can be shown a n a l y t i c a l l y - s e e section 7.2.)
310
P.C. Matthews et al. / Dynamics of coupled oscillators
1.4
(a)
1.2
1
0.8
/(
0.6
Incoherence
0.4
0.2
0
0
i
i
I
I
i
L
0.2
0.4
0.6
0.8
1
1.2
1.4
A
1.2
(b)
1.18
1.16
1.14
1.12
K
1.1
1.08
1.06
1.04
1.02
1
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.()5
1.1
A
Fig. 18. Comparison of stability boundaries for four different frequency distributions: Uniform ( - - ) , triangle ( . . - ), Gaussian
( - - ) and Lorentzian ( . . . . . ). (a) Boundaries of amplitude death and incoherence (obtained analytically). (b) Hopf bifurcation of
the locked state (obtained numerically).
P.C. Matthews et al. / Dynamics of coupled oscillators"
311
4. Boundedness
We now turn to a discussion of our analytical results. In this section we show that the system (2.2) is
b o u n d e d : each oscillator is inside the unit circle at large times.
Consider the equation for the radial motion of an individual oscillator:
t:j = (1 - r / ) r y + K [ R c o s ( d ) - O j ) - r j ] .
(4.1)
Let rmax = max(rj). T h e n rmax _> R, since
1 /v
1 N
R = N ~ r j e i°' < N ~ r j < r . . . .
j--1
(4.2)
j--1
so for the oscillator with r = rmax the coupling term in (4.1) is < 0. T h e n it is clear from (4.1) that
/:max -~< (1 -- rmax)Fmax.
2
H e n c e the function rma× is a decreasing function of time if rmax > 1. N o t e that this function is
continuous but is only piecewise smooth, since as the system evolves in time rm~x may be represented by
different oscillators.
Hence, for any E > 0, rma,, < 1 + • for t large enough. F u r t h e r m o r e , it is easy to show that the flow is
inward on the b o u n d a r y of the region rma× < 1, unless all the natural frequencies are equal. Thus all the
oscillators eventually lie strictly inside the unit circle, as claimed.
5. Amplitude death
The state zj = 0 Vj is clearly a fixed point of the system. The stability of this state of 'amplitude d e a t h '
has been analyzed by E r m e n t r o u t [12] and Mirollo and Strogatz [26]. A m p l i t u d e death is linearly stable
in the limit N - ~ ~ if
K> 1
and
f=
K- 1
g(w)do) < 1
_~ ( K _-1~-2--+ w2
g
(5.1)
i.e. when the coupling is strong and the spread of natural frequencies is large. These two conditions can
be obtained as a special case of our analysis of the stability of the locked state (see section 7.2), since
amplitude death is a trivial case of locking with all the oscillators at the origin. To obtain the intersection
point of these two lines, we use the result that
f
lim + _ ~ p 2 P+ o)2g((.O ) do) = "rrg(0),
p_,0
(5.2)
which is derived in the appendix. By taking the limit K ~ 1 + and using (5.2), we find that the two lines
which determine the stability of amplitude death m e e t at the point K = 1, ~rg(0) = 1. In other words the
corner of the region of amplitude death is at K = 1, A = 1, as indicated in fig. 18a.
6. Incoherence
For K < 1 and in the limit N - ~ ~, the system (2.2) has an incoherent solution given by R = 0,
rf = 1 - K for all j and 0 / = ~oj. In this state, each oscillator rotates at its natural frequency, as if
312
P.C. Matthews et al. /Dynamics of coupled oscillators
uncoupled from the others, and the oscillators are spaced uniformly around their common limit cycle.
We would like to analyze the stability of this situation, but the problem seems difficult because
incoherence is a moving solution - it is always easier to analyze the stability of a stationary state.
A new approach is required for this analysis. The incoherent state is best analyzed by introducing a
density p of oscillators in the complex plane. Actually, since the behavior of an oscillator depends on its
frequency, a different density function is needed for each frequency. With this formulation, incoherence
becomes a stationary state of the system, corresponding to a uniform density on the limit cycle for each
frequency. Now the stability analysis becomes tractable. The original ordinary differential equations
become a partial differential equation governing the evolution of the density. The approach is familiar
from fluid mechanics, where the motion of a large number of particles is replaced by a continuum model.
We do not rigorously justify this continuum limit, but it is plausible and gives results which agree well
with the numerical simulations.
This section presents two different derivations of the stability boundary of incoherence. The first uses a
linear stability analysis based on the density formulation above; the second locates the boundary by
finding where a branch of partially locked solutions bifurcates from the incoherent state.
6.1. Stability calculation
In order to analyze the stability of the incoherent state we introduce a density function p(r, 0, co, t), so
that the fraction of oscillators of frequency co between r and r + dr and between 0 and 0 + dO is
pr dO dr. The density p must obey the normalization condition
~ [ 2"rr
(6.1.1)
Jo pr dO dr = l.
This is a generalization of the method used by Strogatz and Mirollo [38] for analyzing the stability of
incoherence in the phase model (2.8).
The evolution equation for p is just the equation for conservation of oscillators:
~p
O~ + v ' ( p v )
= 0,
(6.1.2)
where v is the velocity of the oscillators given by v = (t:, rEJ). Substituting for v using (2.6) and (2.7) gives
OO
1 3 {p[r2(a2_r2)+KRrcos(O_cfl)]}+
05- + 7 5 7
7
{p[rw-KRsin(O-&)]}=O,
(6.1.3)
where a 2 = I - K. In the incoherent state, the oscillators are uniformly distributed on the circle r = a for
each w, so p = P0 = 6(r - a)/2"rrr and R = 0. The density P0 satisfies (6.1.3) because it is independent of
t and 0 and the generalized function p0(a 2 - r 2) is zero for all r.
We now consider a small perturbation to the incoherent state. Instead of considering the most general
perturbation we study a perturbation corresponding to the most unstable eigenmode, whose form is
suggested by our numerical experiments #1. In this mode, all the oscillators of frequency o) lie on a closed
loop r = a + Erl(O, w, t), which represents a slightly distorted and drifting version of the original limit
cycle. The angular distribution of oscillators around the loop is changed slightly from the uniform
#lA rigorous general calculation can be done using generalized functions, and leads to the same results.
P.C. Matthewset aL/ Dynamics of coupled oscillators
313
1/2rrr. Thus we can write the p e r t u r b e d density function as
p(r,O,~o,t)=~(r-a-erl(O,w,t))
~+ef~(O,w,t)
,
(6.1.4)
where e is a small parameter. T h e centroid is observed to move on a line of constant 05 so we can set
05 = 0. T h e perturbation of the centroid can be written R(t) = eRl(t).
T h e r e are two •(E) effects in (6.1.4), which can be considered separately for the purposes of linear
theory (since their c o m b i n e d contribution is G(e2)). Firstly, we consider the p e r t u r b e d trajectory of an
oscillator, r(O, oo, t ) = a + er~(O, w, t ). Differentiating this equation yields
Or1 "
arl
t: = E - ~ - 0 + E at
(6.1.5)
by the chain rule. Substituting for J; and 0 from (2.6) and (2.7) and linearizing the resulting equation, we
obtain
Or1
Or1
- 2 a 2 r j + K R 1 c o s 0 = o9--0-0- + 0--7-"
(6.1.6)
Seeking solutions in which R~ and r 1 are proportional to e A' we find that rl must obey
Or]
~o-~-0- + (A + 2 a Z ) r l = KR l cos 0.
(6.1.7)
T h e solution for r~ which is periodic in 0 is
r 1 = A cos 0 + B sin 0,
(6.1.8)
where A = KRI(A + 2a2)/[w 2 + (A + 2a2) 2] and B = KRloJ/[oJ 2 + (A + 2a2)2].
We now consider the other G(E) effect due to the small change in the angular distribution of
oscillators, by substituting p = #(r - a ) [ 1 / 2 - r r r + eft(O, t)] and considering the angular terms in (6.1.3).
T h e linearized form of (6.1.3) is then
Of 1
Ofl
a~ + w-b-0- - KR1 cos O/2rca 2 = 0.
(6.1.9)
Assuming solutions periodic in 0 and proportional to e At, we find
fl = C c o s 0 + D s i n 0,
(6.1.10)
where C = AKRJ2"rra2(w 2 + A2) and D = wKR1/2wa2(os 2 + A2).
W e can now apply the self-consistency equation, which is that R is the average of r cos 0:
o~
R= ~fo
o~ 2~r
fo r c o s O p r d O d r g ( ~ o ) d ~ o .
(6.1.11)
P.C. Matthews et al. / Dynamics of coupled oscillator,s
314
Substituting for p from (6.1.4), r I from (6.1.8) and f, from (6.1.10), we find that (6.1.11) yields either
R = 0 or R cancels out giving an equation for A:
2
~
A
~
~ A+2a2a2)2g(2
(6.1.12)
It can be shown by a simple extension of the p r o o f of t h e o r e m 2 in ref. [26] that any solutions A of
(6.1.12) must be real. This result uses our assumptions that g(w) is even and non-increasing on [0,~).
Thus instead of the bifurcation condition Re(A) = 0, we need only consider A = 0. A l t h o u g h one would
like to set A = 0 in (6.1.12), so that (6.1.12) gives K as a function of g(w) on the stability boundary, some
care must be exercised since the first integral in (6.1.12) is discontinuous at A = 0 (see appendix). Instead
we consider the limiting equations as A approaches zero from above and below. Using the notation of the
appendix, (6.1.12) can be written
2
=I(A) +I(A +2a2).
(6.1.13)
For K > 0, (6.1.13) has no solution as A --* 0 because I(A) --* - a v g ( 0 ) and I(A + 2a 2) < =g(0), so the
right-hand side of (6.1.13) is negative.
H e n c e the stability b o u n d a r y is given by taking A --* 0 + in (6.1.12) and using a 2 = 1 - K and (5.2),
which yields
2
~
2(1 - _ K )
~ = ~g(0) + f ~o~2+4i~_
)2g(,o) d,o.
(6.1.14)
Notice that in the limit K--* 1-, the incoherence b o u n d a r y is at w g ( 0 ) = 1 (using (5.2) again); hence
the incoherence b o u n d a r y joins the corner of the death region, K = 1, A = 1. In the limit K ~ 0, the
b o u n d a r y of the incoherent region is given by K = 2 / v g ( 0 ) , which agrees with the result obtained for the
phase model [19-21, 38].
6.2. Bifurcation to partial locking
T h e incoherence b o u n d a r y 6.1.14) can also be obtained by seeking a partially locked state which
branches off from the incoherent state. Just above the onset of partial locking, only a small fraction of
the oscillators are locked; as this fraction tends to zero, this state b e c o m e s equivalent to the incoherent
state. T h e key idea in the analysis is that a partially locked state corresponds to a stationary density for
each frequency w. Such stationarity is not surprising for the locked part of the population, since these
oscillators are simply fixed; the real point is that there are solutions in which the drifting oscillators can
also arrange themselves so as to maintain a stationary distribution. This yields a t r e m e n d o u s simplificat i o n - now R is time-independent, and so (2.6), (2.7) reduce to a o n e - p a r a m e t e r family of two-dimensional systems (parametrized by w.) These are easily analyzed by phase plane methods. T h e resulting
motions must be consistent with the stationarity and the value of R originally assumed.
A further simplification comes from the fact that we are only interested in the bifurcation from the
incoherent state, which has R = 0 and r = a for all w; hence it suffices to set R = ER., where R~ is time
independent, and r = a + G(e), and seek a self-consistent partially locked solution to first o r d e r in e.
P.C Matthews et al. / Dynamics of coupled oscillators
315
This m e t h o d was introduced by K u r a m o t o [19, 20] in the context of the phase model (2.8), and is here
extended to limit-cycle oscillators. A complication not present in K u r a m o t o ' s analysis is that now the
shape of the limit cycle, as well as the motion a r o u n d it, is slightly perturbed.
For a partially locked state, the centroid is stationary. Thus we may choose coordinates in which 4~ = 0
for all time. Then, from (2.7), the equation for the angular motion of an oscillator of frequency o~ is
= o) - ( K e R 1 / r ) sin 0 = ~o - ( K e R J a )
sin 0 + ~ ( e 2 ) .
This means that the oscillators with Iwl < w,. = K e R j / a
(6.2.1)
+ G(e 2) have a stable fixed point at
sin 0 = a o ) / K e R l + eY(e).
(6.2.2)
These locked oscillators make a contribution R~ock to the centroid, where
Rk, ck =
f
~o c
rcosOg(o))d~o.
(6.2.3)
We can evaluate this integral by changing variables from w to 0 using (6.2.2), which yields
R,ock = [ ~ / 2 cos20 g ( 0 ) K E R , dO + ~ ' ( e -2) = K e R , a v g ( O ) / 2 + ~ ( e 2 ) .
~ ~r/2
(6.2.4)
Now we consider the drifting oscillators with ]~o[> Wc. Recall that since the centroid is fixed, each
oscillator behaves as an i n d e p e n d e n t two-dimensional system; hence phase plane methods can be
applied. For the u n p e r t u r b e d system with e = 0, there is a stable limit cycle at r = a. O n e expects that
the p e r t u r b e d system will have a stable limit cycle within G(e) of this. Such a claim is easy to justify by
the P o i n c a r ~ - B e n d i x s o n theorem, as follows. A simple estimate shows that the vector field points inward
on the b o u n d a r y of a thin annulus about r = a, and there are no fixed points in the annulus, since t~ can
never be zero for the drifting oscillators.
For each w, this limit cycle can be written as r(O)= a + erj(O)+ c~(e2), where r~ is 2w-periodic. To
solve for r~(O), we substitute this expression into
i = r ( a 2 - r 2) + E K R I c o s 0 ,
(6.2.5)
which is obtained from (2.6), and then use (6.2.1), which yields the following equation at G(e):
dr I
1
- -~ ( KR, cos 0 - 2aZrl ).
(6.2.6)
The periodic solution of this is
rl(O ) =,4 cos 0 + B cos 0
(6.2.7)
where
A
2a2KRl
w 2 + 4a 4 ,
oKRI
B - w2
- -+ 4a 4 •
(6.2.8)
316
P.c. Matthews et al. /Dynarnics of coupled oscillators"
Having found the path of the limit cycle for each w, we now impose the stationarity condition, and
then calculate the contribution Rdrif t to the centroid. First we do a naive calculation which brings out the
main ideas, and then we indicate a m o r e refined calculation that ultimately gives the same result.
Naively, each oscillator moves in a nearly uniform way, with 0 ( t ) = cot + 0 0 + G ( • ) . H e n c e the
stationary density p is practically uniform along the cycle, i.e. p = 1/2-:: + ~f(•). Thus the contribution to
the centroid from the drifting oscillators of frequency to is
Rdrift(o) ) = f02'rrr(0) COS 0 p ( 0 ) d0
=
f,,2 " [ a
+e(AcosO+BsinO)]
1
c o s 0 ~ - vv- d 0 + c f ( • 2) = • A / 2 + # # ( • 2 ) ,
(6.2.9)
where A is given by (6.2.8). Now integrating the contributions from all the frequencies yields
~c
Rdrir t = f
cc
R d r m ( o ) ) g ( o ) ) do) =
_
KeR,a2f~ go)?( o +) ) 4ado)4 + #9'(•2) •
(6.2.10)
Note that we have introduced a n o t h e r G ( • 2) error here by integrating over all frequencies rather than
over frequencies with Iw[ > o)c = ~ ( e ) .
Finally we set R = R~ock + Rdrifl. Equating terms of G ( • ) gives the formula for the curve where the
partially locked state bifurcates from incoherence:
2
~
2(1 - K )
g ( o ) ) do),
(6.2.11)
which agrees with the stability b o u n d a r y (6.1.14).
The problem with the naive calculation of Rdrift(o)) is that the oscillators with loll near w c do not
actually move at constant speed, and so the corresponding density is not uniform. However, one can
show that these marginal oscillators make an (Y(e 2) contribution to Rdrif t in any case. O n e factor of •
appears because only a fraction of ~(E) of the population is marginal. A second factor of • arises
because these oscillators spend most of their time where their velocity is least, i.e. at points where
sin 0 = 1, and therefore cos 0 = 0. H e n c e their contribution to the integrand r cos 0 in (6.2.9) is also
small.
We make two c o m m e n t s regarding the relation of the above analysis to our numerical simulations:
Firstly, our numerical results did not always show the partially locked state branching off from the
incoherent state. For the uniform distribution, we find that the incoherent state bifurcates to a partially
locked state for small K but to a chaotic state for K close to 1. We conjecture that this is because for K
close to 1, the partially locked state bifurcates subcritically and is therefore unstable. The narrow region
of hysteresis found between the incoherent and chaotic states supports this hypothesis (section 3.10).
Secondly, note that the above calculation assumes that e / a is small. For K close to 1, a becomes small
so the perturbation • must be extremely small. In our numerical simulations, there are inherent
fluctuations in the incoherent state of order ~/(N i/2), so we can expect some disagreement between the
numerical and theoretical stability boundaries when N - 1 / 2 ~ a. H e n c e a very large n u m b e r of oscillators
must be used to determine the incoherence b o u n d a r y numerically when K is close to 1. For example,
when K = 0.8, we find a 5% discrepancy between theory and numerics when N = 800; this is reduced to
less than 1% when N = 12,800.
P.C. Matthews et al. / Dynamics of coupled oscillators
317
7. Frequency locking
In this section we seek fixed points of the governing equations (2.2). Recall that we have chosen a
frame rotating at the mean frequency. Fixed points in this rotating frame correspond to frequency
locking in the original frame, as discussed in section 3.2.
The analysis of the fixed points is surprisingly difficult. The problem is that fixed points are defined
implicitly through a cubic equation involving R, which must itself be determined by a self-consistency
condition. (The corresponding analysis [11] for the phase model (2.8) is easier because the fixed points
are given explicitly in terms of R.) For some p a r a m e t e r values, there are infinitely many locked solutions,
although only one of these is stable.
7.1. Equations for locked states
Since our system is rotationally symmetric and we are seeking a fixed point, we can set O = 0 in (2.5).
In the locked state, the position of each oscillator is determined by its frequency, so we can drop the
subscript j and regard z as a function of o9. Using the polar form of the equations, (2.6) and (2.7), locked
solutions must obey
KR sin
0 = ogr,
KR cos 0
(7.1.1)
=r(K-
1 +r2).
(7.1.2)
Our strategy for finding locked solutions is the familiar self-consistent method of mean-field theory. We
solve for the position (r, 0) of each oscillator, given K and o9 and regarding R as a fixed parameter.
These values of (r, 0) must be consistent with the assumed R in the sense that R = f ~ r cos 0 g(og)dog.
First, we find the equations for r and 0 in terms of R. Eliminating r from (7.1.1) and (7.1.2) gives an
equation for 0(o9, R):
(o9 cot 0 + 1 - K ) o 9 2
=K2R2sin20,
(7.1.3)
which can be written as a cubic equation for cot 0:
(o9 cot 0 + 1 - K ) ( 1
+ cot20)o9
2 =
(7.1.4)
K 2 R 2.
Alternatively, we can eliminate 0 and obtain a cubic equation for r2:
r2[(r2 + K - 1 ) 2 + o92] = K2R 2.
(7.1.5)
We shall use both (7.1.4) and (7.1.5) in our analysis of the locked state. (7.1.4) and (7.1.5) are essentially
the same cubic equation, since r 2 = o9 cot 0 + 1 -- K. This cubic may have one or three roots, depending
on K, o9 and R. Note that for K > 1, the cubic equation (7.1.5) has a unique solution. In general, the
condition for the cubic to have three roots is
4 2[ 2 +
1)212+ 27 4R4 + 4KER2 _ 1 [9 2 +
K-1) 2]
716)
318
P.C. Matthews et al. / Dynamics of coupled oscillators
T h e value of R is d e t e r m i n e d by the self-consistency condition, which in the limit N ~ ~ is
R= f
3C
rcosOg(o~)dw,
(7.1.7)
which can be written
1
K
_f= sinOcosOg(og)dw
~
(7.1.8)
~o
or in terms of r,
3C
KR2= f
r2(r2+K -1)g(w)d~o.
(7.1.9)
Before addressing the existence of locked solutions, we first derive the equations governing their stability.
7.2. Stability of locked solutions
Suppose that we have a locked state zl(o~). We can specify that the centroid ~, is real, in which case
(7.1.3) implies that 0 is an odd function of ~o. H e n c e R e ( z E) is an even function of ~o and Im(z~) is an
odd function of w, as in fig. 3.
Writing z = z I + eh and linearizing (2.4) leads to the following equation for the p e r t u r b a t i o n h:
Jz = (1 - K +
iw - 2 r 2 ) h -z(h* +I~,
(7.2.1)
where the asterisk denotes complex conjugation, r = [zll and h = f~h(w)g(oo)dw. Setting h = x + iy,
we find
¢o-Im(z()
l-K-2r2+Re(z()
xy)+K Y "
Seeking solutions proportional to e A', this can he written
where A(w) is the 2 × 2 matrix in (7.2.2). T h e r e are two cases to consider: AI - A ( ~ o ) may be singular for
some ~o, or invertible for all w.
Firstly, suppose IAI - A [ = 0 for some w. T h e n one solution to (7.2.3) is
(~)=(~),
with
(y)=(O)o
for all frequencies except +¢o._
(7.2.4)
Physically this corresponds to an e i g e n m o d e in which only the oscillators of frequency +~o move, while
the other oscillators and hence the centroid remain stationary. Mathematically, this corresponds to the
P.C. Matthews et al. / Dynamics of coupled oscillators
319
continuous spectrum for the linearized system (7.2.3). T h e eigenvalue A is then given by solving
IAI - A ( w ) I = 0, i.e.
( 1 - K - 2r 2 --/~)2 q- w2 _ r4 = 0
(7.2.5)
A = 1 -K-
(7.2.6)
or
2r 2 _+ !F-r4 - 0) 2 .
It is clear that locked solutions with K > 1 are stable to perturbations of this form: if r 4 < 0) 2 then
R e ( a ) < 0; while if r 4 > 0)2, Vr~r4 _ 0)2 < r 2 and so both roots are negative.
We can use the result (7.2.6) to show that a frequency distribution g(0)) with 'tails' (i.e. g(w) ~ 0 for
large w) cannot have a stable locked solution for K < 1. T o prove this we note from (7.1.5) that for large
0), r ~- K R / w << 1. Thus for large 0), a -~ 1 - K_+ iw, so the oscillators with large w are unstable to an
oscillatory growing m o d e with frequency o).
T h e second case to consider is ] a I - A ] =¢ 0 go). T h e n we can solve (7.2.3) to find x and y:
(7.2.7)
We now apply the consistency condition by averaging (7.2.7) over all the oscillators, which gives
=
(7.2.8)
T h e n for a nontrivial solution,
1-Kf_~(AI-A)-lg(w)dw
=0.
(7.2.9)
T h e solutions to (7.2.9) c o r r e s p o n d to the discrete s p e c t r u m for the system.
Now the off-diagonal e l e m e n t s of the matrix ( a l - A ) - l
only involve 0) and Ira(z2). Since these are
odd functions of 0) and g(w) is even, the 2 × 2 matrix in (7.2.9) is diagonal. This m e a n s that the
d e t e r m i n a n t in (7.2.9) vanishes when one of the diagonal elements vanishes, giving the following equation
for the growth rate A:
1
~
A+K-I+2r
z _ + R e ( z 2)
K - f - ~ ( A + K ~- 1 + 2 r 2 ) 2 + 0 ) 2 - r 4g(0))d0)"
(7.2.10)
T h e eigenvectors (~, y) are simply the vectors (1, 0) and (0, 1).
T h e negative sign in (7.2.10) c o r r e s p o n d s to perturbations with eigenvector (2, ~) = (1, 0). This m e a n s
that the o r d e r p a r a m e t e r moves radially. T h e positive sign corresponds to (0, 1), representing rotational
320
P.C. Matthews et al. /Dynamics ¢ff"coupled oscillators
1.5
1
t,
0.5
v
-0.5
-1
-1'~.9
I
i
i
i
i
:
£
i
i
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
Fig. 19. Spectrum of eigenvalues for the stability of the locked state ( K = 1.05, A = 1.125, 50 oscillators, uniform distribution).
motion. If we take the positive sign and set A = 0, one can show that (7.2.10) is satisfied identically; it
reduces to the self-consistency equation (7.1.7). Thus there is always one neutrally stable eigenvalue. This
is due to the rotational symmetry of the system.
Note that we can derive the equations (5.1) for the stability boundary of amplitude death as a special
case of (7.2.6) and (7.2.10), by setting A = 0, z E= 0 and r = 0.
The equations for the stability of the locked state are difficult to analyze. Indeed we do not even know
how many solutions there are to (7.2.10). However there is a straightforward numerical algorithm for
finding the spectrum for any locked state. We first solve the locking equations (7.1.3) and (7.1.8) to find
the locked state, and then compute the eigenvalues of the real 2 N × 2 N system corresponding to (7.2.1).
Fig. 19 shows the location of the eigenvalues in the complex plane for a system of N = 50 oscillators for
the uniform distribution. The parameters have been chosen so that the system is close to the intersection
of two stability boundaries. This is evidenced by the fact that t w o pairs of complex conjugate eigenvalues
lie close to the imaginary axis.
Most of the eigenvalues in fig. 19 lie on a curve shaped like a bell with a line through it. The curve
corresponds to the continuous spectrum (7.2.6). There is a close agreement between the position of the
eigenvalues and the continuous spectrum valid in the limit N ~ ~. For each of these eigenvalues, the
associated eigenvector is sharply peaked at a single frequency, i.e. all but one of its components is near
zero.
The remaining eigenvalues are isolated and correspond to the discrete spectrum given by solutions to
(7.2.10). One of the eigenvalues is zero, as expected from rotational symmetry. Of the two pairs of
eigenvalues close to the imaginary axis, the one with smaller imaginary part represents a radial Hopf
oscillation (fig. 10b), while the other represents a transverse Hopf oscillation (fig. 11). This is determined
by looking at the associated eigenvectors.
P.C. Matthewset al. / Dynamicsof couph'doscillators
321
7.3. Existence of locked solutions for K > 1
W e now show that for K > 1 there is a locked solution in the region of p a r a m e t e r space where
amplitude death is unstable. To show this we define a function
F(R)=f - ~ sinOc°SOg(oJ)d¢o
o)
1
- ~
(7.3.1)
so that F(R) = 0 for a locked solution, from (7.1.8). We prove the required result by showing that F(R)
is positive for R = 0 and negative for R = 1, and using the intermediate value theorem.
For R = 0, the unique solution to (7.1.4) is tan 0 = o ~ / ( K - 1). W e can write F(R) in terms of tan 0
since sin 0 cos 0 = tan 0 / ( 1 + tan20). H e n c e we can find F(0):
K-1
1
g ( o ) ) d~o - ~ .
(7.3.2)
So F ( 0 ) = 0 at the b o u n d a r y of stability of amplitude death, from (5.1). (This is to be expected since
amplitude death is a special case of frequency locking with R = 0.) In the region where amplitude death
is unstable, F(0) > 0.
For R = I , K s i n 0 = m r , so
F ( 1 ) = f ~ r cos
K Og(°°) d w -
= --Kf_Jrc°s
~1
(7.3.3)
0 - 1)g(~o)dw.
(7.3.4)
It can be seen from (7.1.5) that r < 1 when R = 1, so F(1) < 0.
Now F(R) is a continuous function because the integrand of (7.3.1) is a continuous function of both R
and ~o, since the cubic in (7.1.5) is m o n o t o n i c for K > 1. H e n c e there is a solution to F ( R ) = 0 since
F(R) is positive for small R and negative for R = 1.
7.4. Existence and uniqueness of locked solutions for K = 1
For K = 1, the a r g u m e n t of the previous section breaks down for small R, because the integral in
(7.3.2) is not well defined. Thus the evaluation of F(0) requires us to consider the case K = 1 separately.
Fortunately, there are some convenient simplifications which occur only for this special case. In
particular, we are able to eliminate o~ completely, and express F(R) solely in terms of a d u m m y variable
0 and an adjustable p a r a m e t e r R. This enables us to show that the locked solution is unique.
For K = 1, (7.1.3) b e c o m e s w 3 cot 0 = R 2 sin20, which has a unique solution for cot 0. In this case F(R)
can be simplified by changing the variable of integration to 0. This eliminates w, giving
F ( R ) = [ ~r/2 l + 2 c o s e 0
,,/2
3
(R2/3sinO)
g
cosl/3 0
d O - 1.
(7.4.1)
322
1~C. Matthews et al. / Dynamics of couph'd oscillators
0,9
U/~Kdecreasing
0,8
0.7
R
0.6
0.5
K=1.45
0.4
0.3
0.2
0.1
O0
0.2
0.4
0.6
0.8
l
1.2
A
Fig. 20. Order parameter amplitude R in the locked state as a function of A for several values of K for the uniform distribution.
Note that for K > 1. all curves intersect the horizontal axis to the right of A = 1. At K = 1 the intersection jumps to A = 2/3.
H e n c e F ( 0 ) = 2 - r r g ( 0 ) / 3 - 1. F o r R = 1, the a r g u m e n t of section 7.3 shows that F ( 1 ) < 0, so a locked
solution exists p r o v i d e d that 2 r r g ( 0 ) / 3 - 1 > 0, i.e. _4 < 2 / 3 . Also, since we assume g to be even and
n o n - i n c r e a s i n g for positive a r g u m e n t , F ( R ) is a d e c r e a s i n g function, so t h e r e is a unique solution to
F ( R ) = 0. H e n c e the locked solution is unique.
T h u s at K = 1 t h e r e is a d i s c o n t i n u i t y in the b o u n d a r y of the region w h e r e f r e q u e n c y locking exists: for
K = 1 the b o u n d a r y is at _4 = 2 / 3 but for K just g r e a t e r t h a n 1 the b o u n d a r y is at _4 = 1. This surprising
result was n o t e d for the L o r e n t z i a n d i s t r i b u t i o n by Shiino and F r a n k o w i c z [32]; we have shown it to be
t r u e for any g(w) that is even a n d n o n - i n c r e a s i n g on [0,~).
This d i s c o n t i n u i t y is i l l u s t r a t e d in fig. 20, which shows the results of a n u m e r i c a l solution of the
e q u a t i o n s for f r e q u e n c y locking for the u n i f o r m distribution. O b s e r v e that for K > 1 t h e r e is a single
l o c k e d solution a n d the o r d e r p a r a m e t e r R is a d e c r e a s i n g function of _4. F o r K < 1, t h e r e are two
l o c k e d solutions. In this case the solution with l a r g e r R is the stable one seen in our n u m e r i c a l
i n t e g r a t i o n of (2.2) d e s c r i b e d in section 3.2. T h e existence of two locked states is to be e x p e c t e d , since in
section 3.5 we f o u n d n u m e r i c a l e v i d e n c e that locking is lost at a s a d d l e - n o d e b i f u r c a t i o n for K < 1.
Z5. Locked solutions for K just greater than 1
T h e d i s c o n t i n u i t y in t h e locking b o u n d a r y n o t e d above raises the q u e s t i o n of the n a t u r e of the lockcd
solutions for K just g r e a t e r than 1 in the region 2 / 3 <_4 < 1. W e now c o n s i d e r the existence of locked
solutions for K = 1 + E, e > 0. T h e e q u a t i o n (7.1.3) which d e t e r m i n e s 0(~o) is
( w cot 0 - E)w 2 = R 2 sin20,
(7.5.1)
P. C. Matthews et al. / Dynamics of coupled oscillators
323
G u i d e d by the numerical solution of the locking equations, we seek a solution in which the scaling for R
is R ~ e 3/2. T h e n for to = O(1), cos 0 ~ e, so these oscillators can make only an ~ ( e ) contribution to the
consistency integral (7.1.8). Thus the consistency integral is d o m i n a t e d by the oscillators with small ]w]. If
we make the rescaling w = eW, R = e3/2Ro, then all the terms in (7.5.1) are of comparable size:
(Wcot 0-
1)W 2 = R ~ sin20
(7.5.2)
and to leading o r d e r in E the consistency integral (7.1.8) b e c o m e s
1
g(0) -
~
sin 0cos0
W
dW.
(7.5.3)
Making the change of variable to 0 as in section 7.4, this can be written
1
_
g(0)
f~/2
-
7/21
-
2 R 2sin40
W2 + 3R 2 sin20 dO.
(7.5.4)
Now we consider varying R 0 to try to satisfy this equation. T h e second term in the integrand is less than
zero but greater than - 2 s i n 2 0 / 3 , so the integral in (7.5.4) lies between 2"rr/3 and -rr. T h e r e f o r e a
solution for R 0 exists provided that 2 / 3 < ~1 < 1, as we would expect from our previous analysis.
Thus for 2 / 3 < A < 1 there is a locked solution with the assumed scaling. On the other hand, for
~1 < 2 / 3 , the locked solution has R = (~(1), as shown in fig. 20.
We can prove that the locked solutions with small R for 2 / 3 < A < 1 are unstable: since K is close to
1 and r 2 is small, the stability equation (7.2.10) reduces to
1 ~ f ~_ ~ A 2 +Ao j 2 g ( w ) d o .
(7.5.5)
F r o m property (v) of the appendix, this equation has a real positive solution if A < 1. Thus the locked
solutions for K = 1 + e, 2 / 3 < A < 1 are unstable.
7.6. Existence of multiple locked solutions for small K
W e now consider the existence of both stable and unstable locked solutions for small K. We claim that
in either case, locked solutions exist only if the width of g(oJ) is ~Y(K). This is clear if we rewrite the
self-consistency equation (7.1.8) as
t~
l=j_/
K
~-sin0c°s0g(w)d°.
This shows that ' m o s t ' of
•(K).
g(w)
(7.6.1)
must be in the range oJ ~ K. H e n c e our p a r a m e t e r A = 1 / ~ g ( 0 ) must be
W e now consider the existence of locked states for A ~ K << 1. It can be seen from (7.1.6) that in this
regime the cubic equation (7.1.4) has three roots if IoJ] < KR (fig. 21).
324
P.C. Matthews et al. / Dynamics o f coupled oscillators
r2( (r2+K- 1)2+~~
y~ ~ . . ~ _
I
_ K2R2
Fig. 21. The three roots of the cubic (7.1.5) for w ~ K << l.
Only the large-r root (solid circle) corresponds to stable
locking.
I
1-K
3
1-K
r2
From (7.1.5) and (7.1.4), the approximate solutions for r and 0 are
r~KR,
sin0~co,
cos0-~-I
(7.6.2)
or
r2 = l + K ( - 1
+ v/R 2 - w2/K2 ),
sinO=w/KR.
(7.6.3)
This second pair of solutions only exists for ~o < KR.
By substituting each of these three solutions into the eigenvalue equation (7.2.6), it can be shown that
only one of them is stable. The stable solution is the one with largest r, i.e. the solution given by (7.6.3)
with the positive square root. For a stable locked state, we must choose this large-r solution for each w,
and this forces Wm~,x< KR. T h e r e f o r e the stable locked solution is unique.
However, if we are c o n c e r n e d only with existence of locked states, we can choose any of the roots for
the cubic. We now show that there are infinitely m a n y (unstable) locked solutions provided that
1 >> K > 2A. We first fix a value for R, and consider the effect of varying the fraction of oscillators p for
which the small-r solution (7.6.2) is chosen. W e show that for any sufficiently small R, we can find p so
that (7.6.1) is satisfied, and therefore a locked solution with that R exists. T h e a r g u m e n t is again based
on the intermediate value theorem.
Note first that the small-r solution (7.6.2) makes a contribution of order K to the consistency integral
(7.6.1). T h e r e f o r e if we choose p = 1, the integral in (7.6.1) is G ( K ) .
W e now consider solutions of the form (7.6.3), which make an order 1 contribution to (7.6.1). The
integral in (7.6.1) is maximized by choosing p as small as possible; we choose the large-r solution (7.6.3)
for all oscillators with w < KR. This maximum value as p is varied at fixed R is
f =/2 K cos20 g ( KR sin 0) dO + • ( K ) .
(7.6.4)
v/2
Since we assume g to be non-increasing on [0, ~), (7.6.4) is a decreasing function of R, with a maximum
value of K~rg(O)/2 as R ~ 0.
Provided that this maximum is greater than 1, we know that we can satisfy the criterion (7.6.1) for the
existence of locked solutions, since we can continuously vary p.
P.c. Matthewset al. / Dynamics of coupled oscillators
325
Thus a locked solution exists if Krrg(O)/2 > 1, i.e. K > 2A. For fixed K with K > 2A, there is a range
of values for R, 0 < R < R .... for which locked solutions exist. Notice that the b o u n d a r y of the region of
existence of locked states is the same as the b o u n d a r y of the region in which incoherence is stable.
7. 7. Boundary between locked and partially locked solutions for small K
We now calculate an approximate formula for the b o u n d a r y between stable frequency locking and
partial locking, as a power series in K. Recall from section 7.2 that locking can only be stable for K < 1 if
the frequency distribution g(w) cuts off at some frequency 3' = max(w). T h e b o u n d a r y between stable
locking and partial locking occurs when the oscillators with the most extreme frequencies, o~ = _+3', are
about to b e c o m e unstable and drift away from the other locked oscillators. The onset of this type of
instability occurs when Re(A) = 0 in (7.2.6). In fact the condition we want is simply A = 0, since 3' is small
and r is close to 1 for small K; hence A cannot be pure imaginary. We therefore set A = 0 and w = 3' in
(7.2.6). By rewriting (7.2.6) in terms of 0, we can express the neutral stability of the oscillator of
frequency 3' as an equation relating 7, K and a, where ce is the value of 0 when w = 3'. This condition is
3'(2 + c o s 2 a ) + (1 - K )
sin2c~ = 0
(7.7.1)
which can be solved exactly for a, giving
ol = ~- + ~- s i n - l
-sin
V/T 2 + (l - K ) 2
.]//,)/2+ ( 1 - K )
(7.7.2)
2
"
T h e next step is to solve the locking equation (7.1.3) as a power series in K. As in previous sections, we
do this by writing ~o as a function of 0, as this will simplify the evaluation of the self-consistency integral.
T h e solution for w(O) is
w(O)=KRsinO[l+K(1-RcosO)/2+K2(1-RcosO)(3-5RcosO)/8]
+~(K4).
(7.7.3)
A n important special case is obtained by setting o~ = y in (7.7.3). This gives a relation between 3', K, R
and a:
3' = K R s i n a
[1 + K ( 1 - R c o s a ) / 2 + K 2 ( 1 - R c o s a ) ( 3 - 5 R c o s a ) / 8 ]
+~'~(K4).
(7.7.4)
Since a itself d e p e n d s on 3' and K t h r o u g h (7.7.2), we can regard (7.7.4) as giving us a relation between
R, 3' and K along the locking boundary.
Now we can find a second relation between R, 3' and K, from the self-consistency equation (7.1.8).
Eliminating R between this and the previous equation will yield the desired boundary. It is only at this
final stage that we n e e d to assume a particular form for g(w).
Imposing (7.1.8) and changing the variable of integration from co to 0 gives
1
sin 0 cos 0 do~
= _~
w(O)
dO g ( w ( O ) ) dO.
(7.7.5)
We now substitute w(O) and a into the integral, using (7.7.3) and (7.7.2), and then evaluate the integral
as a power series in K.
P.C. Matthews et al. /Dynamics of coupled oscillators
326
When this approach is carried out for the uniform distribution, we eventually obtain the locking
boundary for small K:
K
K2
[ 7
A=2+12-+[72
1-28 K~ + G ( K 4 ) "
(7.7.6)
Although derived for small K, the three-term Taylor series (7.7.6) gives the boundary of frequency
locking correct to 1% for any K up to 0.7, when compared with our numerical results. Note that the
locking boundary is tangent to the incoherence boundary at the origin, K = 2A, derived in section 6.1.
Thus the region of partial locking in fig. 17a has a cusp at the origin and is extremely narrow. However,
this result is peculiar to the uniform distribution. For the triangle distribution, the locking boundary is
6~
K+
+ ~'(K3).
(7.7.7)
This curve has a different slope at the origin than the incoherence boundary, and so there is a much
wider region where partial locking is found.
8. D i s c u s s i o n
We have studied the dynamics of a large system of coupled limit-cycle oscillators. An analytical attack
on the problem in the general case is simply too difficult for present day methods. Therefore we have
made a simplifying assumption: each oscillator is coupled equally to all the others. This assumption
corresponds to the mean-field approximation in statistical mechanics, which is always the first approximation to try when analyzing a new many-body system.
A second important assumption is that the natural frequencies of the oscillators are distributed across
the system. For the particular model studied here, the problem would be too simple if the oscillators
were identical- they would all eventually become perfectly synchronized. Some disorder must be added
to the system to make it interesting. Our approach is to use random but fixed natural frequencies. An
alternative is to add the analog of thermal disorder, i.e. a rapidly fluctuating noise term, to each of a
large number of identical oscillators [4-6, 31, 46].
8.1. S u m m a ~
The results of this paper are summarized in the phase diagrams (figs. 17 and 18). The collective
behavior of the system is shown as a function of the coupling strength and the width of the frequency
distribution. The simplest types of behavior are steady, in the sense that they correspond to a stationary
distribution of oscillators in the complex plane. Of course, amplitude death and frequency locking are
trivially s t e a d y - both correspond to fixed points of the governing equations (2.2). Incoherence and partial
locking are also statistically steady, even though individual oscillators continue to move.
An unexpected finding is that there are unsteady states. These unsteady states have no counterpart in
either statistical mechanics or in any previous research on large systems of oscillators with all-to-all coupling.
Our numerical simulations (section 3) show that the phase space distribution can vary periodically,
quasiperiodically, or chaotically. As a result, the order parameter (2.5) for the system also exhibits
P.C. Matthews et al. / Dynamics of coupled oscillators
327
persistent unsteady behavior. We are unaware of any previous example of a many-body system with an
unsteady order parameter.
In addition to these numerical results, several analytical results can also be obtained, thanks to the
simple form of the model. In section 4, we showed that all the oscillators eventually lie entirely inside
the unit circle. The result is unusual in that it holds for all values of the coupling strength K and the
frequency spread A. In particular, the result is valid whether the system is steady or unsteady. The
physical reason for the boundedness is clear: in the absence of coupling, each oscillator has a limit cycle
on the unit circle; the coupling only serves to pull the oscillators toward each other (or equivalently,
toward their centroid in the complex plane).
Other analytical results include formulas for the stability boundaries of amplitude death and incoherence. The death boundary (5.1) has been calculated in detail elsewhere [26] and is re-derived here
(sections 5 and 7.2) as a special case of the stability for locked states. The boundary of incoherence is
obtained by two different methods. A stability calculation in section 6.1 gives a formula (6.1.12) for the
growth rate A of the most unstable mode. By allowing A to approach zero from above, we derive the
incoherence boundary (6.1.14). In section 6.2, the incoherence boundary is derived by a variant of
Kuramoto's [20-22] self-consistency method: a partially locked solution is explicitly constructed in the
limit of small R, where R is the amplitude of the order parameter. As R tends to zero, this partially
locked solution joins the incoherent solution along the stability boundary.
The analysis of frequency locking is surprisingly tricky (section 7). One would expect that it should be
easy to analyze the frequency-locked states because they correspond to fixed points of (2.2). Thus we are
somewhat embarrassed to admit that we do not yet have a complete picture of locking. Eqs. (7.2.6) and
(7.2.9) govern the stability of locked states, but many questions about existence and uniqueness remain.
Our numerical results are summarized in fig. 20, which shows the dependence of R on K and zl. We
have a relatively good analytical understanding of this picture for K >_ 1. In section 7.3, we prove that
locked solutions exist for each K > 1 and A to the left of the death region. (Our proof confirms that
locked states exist even if the frequency distribution has infinite tails, as conjectured by Shiino and
Frankowicz [32].) Numerics suggest that the locked solution is unique for K and zl to the left of the
death region, but this is unproven. Numerics also suggest that the locked state is stable outside the
unsteady region of fig. 17a, and unstable otherwise, but this is unproven as well. For K = 1 we can prove
both existence and uniqueness of the locked state (section 7.4).
The situation is much more complicated for K < 1. The trouble is that the cubic equation (7.1.5)
determining the locked states can have multiple solutions. Numerics suggest that for K slightly less than
I, there are at least two locked solutions for A < 2/3. For some values of K and A, there must be an
infinite number of locked solutions, although all but one of these are unstable, as argued in section 7.6.
In spite of these complications, we can still find an analytical approximation to the stability boundary
of locking. Section 7.7 presents a perturbative calculation of the boundary in the small K limit. Thus
approximation agrees well with the numerical results even for moderate K.
8.2. Relation to preuious work
There has been a great deal of research [11, 19-22, 38] on the phase model (2.8), which can be
regarded as a limiting case of our model (2.2) for small K and A. In this limit, amplitude variations are
negligible, and the system always settles into frequency locking, partial locking or incoherence. Note that
these are the three regions belonging to the lower left corner of the phase diagram (fig. 17a), as expected
since this corner corresponds to the phase model limit.
328
P.c. Matthews et al. /Dynamics of coupled oscillators
When K is no longer assumed to be small, the oscillators can undergo large deviations from the
original limit cycle. In its most severe form, this can be manifested as amplitude death [2, 12, 26, 32, 47].
Our results show that a second important consequence of variable amplitude is the appearance of
unsteady behavior.
The limit-cycle model (2.2) has been studied by other authors [1, 12, 29, 32, 47]. Yamaguchi and
Shimizu [47] derived (2.2) from averaging theory applied to a system of weakly nonlinear van der Pol
oscillators. They actually considered a more general system in which noise terms were also included
along with distributed frequencies. They gave an approximate analysis based on the slaving principle of
Haken [16]. However, the analysis was argued to be valid only in the region K ~ A >> 1, in our notation.
In this regime all the oscillators stay close to the centroid at all times, and only amplitude death and
frequency locking are possible.
Our work is most closely related to that of Shiino and Frankowicz [32]. They analyzed (2.2) for the case
of a Lorentzian distribution of frequencies. They obtained the equations for the locked states (section
7.1), and used a self-consistency argument to find the death boundary for K >_ 1. They did not give
analytical results about the stability of death or locking, nor did they derive the boundaries of
incoherence or locking. On the basis of numerical studies, they reported a phase diagram with only four
regions, corresponding to locking, partial locking, amplitude death and incoherence. They did not
mention the unsteady behavior of the system.
Ermentrout [12] analyzed amplitude death in (2.2) and showed numerically that it occurs in several
other systems of oscillators. He briefly discussed the transition from death to locking for K > 1 in (2.2),
but did not analyze the dynamics for K < 1.
Satoh [29] presented numerical studies of a random net version of (2.2) for N = 23 x 23. Each
oscillator was connected to n others at random, where n << N. In contrast, our model (2.2) corresponds
to the fully connected case n = N - 1. Satoh assumed a uniform distribution of natural frequencies, and
obtained a phase diagram very similar to that reported here in fig. 17. For example, when n = 10 and
A = 2 / 7 , he found a sudden transition to locking at a coupling strength corresponding to K = 0.580; our
three-term power series (7.7.6) predicts the onset of locking at K = 0.573. Satoh's results show that the
assumption of all-to-all coupling is not strictly necessary for our results to hold. That is encouraging,
since a random connectivity is sometimes more physically realistic than all-to-all coupling.
Aronson et al. [2] gave a rigorous and detailed analysis of N = 2 coupled oscillators with more general
coupling than that considered here. They also investigated the consequences of 'shear', in which the
frequency w is allowed to depend on the amplitude r of the oscillator; such a shear term is generically
present in the normal form for a supercritical H o p f bifurcation [14]. They found counterparts to the
behavior seen here, including locking, amplitude death, phase drift (which is analogous to both
large-amplitude oscillations and incoherence in our system), and phase-trapping (analogous to our H o p f
oscillations). Their phase diagrams (figs. 4 and 15 in ref. [2]) exhibit some striking similarities to ours.
However there is no chaos with just two oscillators. Work in progress (Matthews, unpublished) shows
that chaos can occur for our system with N = 3 oscillators.
8.3. Directions f o r future research
There are many unanswered questions about the specific model (2.2). We have found numerically that
for K > 1, locking is lost by a H o p f bifurcation. This seems to be the case for every distribution g(w) that
we have studied; can one prove that such H o p f bifurcations always occur? As discussed above, another
P.C. Matthews et al. / Dynamics of coupled oscillators
329
set of questions concerns the existence and uniqueness of locked states. Finally, can one obtain any
rigorous results about the existence of periodic, quasiperiodic, or chaotic motions of the system?
A natural extension of the present work would be the study of limit-cycle oscillators with local
interactions. Nearest neighbor or other forms of local coupling would introduce spatial structure that is
absent in our model. Satoh [29] has studied a two-dimensional lattice of limit-cycle oscillators, and
short-range versions of the phase model have been investigated by several authors [9, 18, 28, 36, 37]. Will
the unsteady phenomena found here persist, or will such phenomena disappear because the system
breaks up into uncorrelated clumps? How does the behavior depend on the spatial dimension of the
underlying lattice? By analogy with critical phenomena in equilibrium statistical mechanics [23], is there a
lower critical dimension below which the system has no phase transition-like behavior? Is there an upper
critical dimension above which the behavior is similar to that seen in the mean-field theory presented
here? These questions mig.ht be approached by the renormalization group methods used for other
systems of coupled oscillators [5, 9, 13].
One should also consider models in which the individual oscillators have more complicated dynamics
than (2.1). For example, we have neglected the dependence of the frequency o~ on the amplitude r of the
oscillator. Aronson et al. [2] have shown that such 'shear' terms greatly complicate the dynamics in a
system of two coupled oscillators. It is an open question whether shear has similarly dramatic effects for
large N.
Finally, the problem studied here raises some fundamental issues about the statistical mechanics of
large dynamical systems [4, 10, 21]. Recall that for coupling K < l, the system undergoes a transition
from chaos to incoherence as the distribution of frequencies is made broader (fig. 17). What is the nature
of this transition? In the incoherent regime the system acts almost like an uncoupled set of N harmonic
oscillators. Because the frequencies are chosen at random, the corresponding motion in phase space is
expected to be ergodic on an N-dimensional torus. How can this intrinsically high-dimensional state be a
neighbor to the low-dimensional chaos seen in our simulations? Does the dimension of the chaos
gradually increase as the incoherence boundary is approached, or is there a sudden explosion to the
ergodic state? The system studied here may provide a simple model for exploring the relation between
chaos and ergodicity in statistical mechanics.
Acknowledgement
Research supported in part by National Science Foundation grants DMS-8906423 and DMS-8916267,
and by a Presidential Young Investigator Award to SHS.
Appendix
This appendix discusses the function
A
J_~a~+~o2g(~o)do),
F
I(a)
=
(A.1)
which arises in sections 5, 6.1 and 7.5. Here g(w) is a probability density which is even and non-increas-
P.C. Matthews et al. /Dynamics q[' coupled oscillators
330
I(X)
g(0)
Fig. 22. The function l(h) for the uniform distribution.
ing on [0,~). I(A) has the following properties for real A:
(i) I(A) is odd and strictly decreasing on [0, ~). The proof of this is given m the proof of theorem 2 of
ref. [26].
(ii) I ( A ) ~ A J as A - ~ .
(iii) I(A) is discontinuous at A = 0, and
lim I ( A ) = w g ( 0 ) .
(A.2)
A -*0 +
This result follows from the fact that the kernel function A / ( A 2 + 0) 2) integrates to w for A > 0 and yet
has a limit of 0 as A -~ 0 + at fixed to. Thus the kernel approaches v6(to) as A -~ 0 +, giving (A.2).
(iv) A sketch of I(A) is shown in fig. 22, for the uniform distribution.
(v) N o w we allow A to be complex. For c real, any solution to the equation I(A) = c must be real (see
the proof of theorem 2 of ref. [26]). Hence, using (i) and (iii), there are no solutions for A if Icl >_ v g ( 0 )
and a unique solution if ]cl < wg(0).
References
[1] Y. Aizawa, Synergetic approach to the phenomena of mode-locking in nonlinear systems, Progr. Theor. Phys. 56 (19761
703-716.
[2] D.G. Aronson, G.B. Ermentrout and N. Kopell, Amplitude response of coupled oscillators, Physica D 41 (1990) 403-449.
[3] P. Berg6, Y. Pomeau and C. Vidal, Order Within Chaos: Towards a Deterministic Approach to Turbulence (Wiley, New York,
1984).
[4] L.L. Bonilla, Stable nonequilibrium probability density and phase transitions for mean-field models in the thermodynamic
limit, J. Star. Phys. 46 (1987) 659-678.
[5] L.L. Bonilla, Nonequilibrium statistical mechanics model showing self-sustained oscillations, Phys. Rev. Lett. 60 (1988)
1398-1401.
[6] L.L. Bonilla, J.M. Casado, and M. Morillo, Self-synchronization of populations of nonlinear oscillators in the thermodynamic
limit, J. Star. Phys. 48 (1987) 571 591.
[7] J. Buck and E. Buck, Synchronous fireflies, Sci. Am. 234 (19761 74-85.
[8] J.P. Crutchfield and K. Kaneko, in Directions in Chaos, ed. Hao Bai-Lin (World Scientific, Singapore, 1987).
[9] H. Daido, Lower critical dimension for populations of oscillators with randomly distributed frequencies: A renormalizationgroup analysis, Phys. Rev. Lett. 61 (1988) 231-234.
[10] H. Daido, Intrinsic fluctuations and a phase transition in a class of large populations of interacting oscillators, J. Stat. Phys. 60
(1990) 753-8(/0.
P.C. Matthews et al. / Dynamics of coupled oscillators
331
[11] G.B. Ermentrout, Synchronization in a pool of mutually coupled oscillators with random frequencies, J. Math. Biol. 22 (1985)
1-9.
[12] G.B. Ermentrout, Oscillator death in populations of 'all-to-all' coupled nonlinear oscillators, Physica D 41 (1990) 219 231.
[13] D.S. Fisher, Sliding charge-density waves as a dynamic critical phenomenon, Phys. Rev. B 31 (1985) 1396-1427.
[14] J. Guckenheimer and P. Holmes, Applied Mathematical Sciences, Vol. 42. Nonlinear Oscillations, Dynamical Systems, and
Bifurcations of Vector Fields (Springer, Berlin, 1983).
[15] P. Hadley, M.R. Beasley and K. Wiesenfeld, Phase-locking of Josephson-junction series arrays, Phys. Rev. B 38 (1988)
8712-8719.
[16] H. Haken, Synergetics (Springer, Berlin, 1978).
[17] N. Kopell, Toward a theory of modelling central pattern generators, in: Neural Control of Rhythmic Movement in
Vertebrates, eds. A.H. Cohen, S. Rossignol and S. Grillner (Wiley, New York, 1988).
[18] J.M. Kowalski, A. Ansari, P.S. Prueitt, R.L. Dawes and G. Gross, On synchronization and phase locking in strongly coupled
systems of planar rotators, Complex Systems 2 (1988)441-462.
[19] Y. Kuramoto, Self-entrainment of a population of coupled nonlinear oscillators, in: Lecture Notes in Physics, Vol. 39.
International Symposium on Mathematical Problems in Theoretical Physics, ed. H. Araki (Springer, New York, 1975) pp.
420-422.
[20] Y. Kuramoto, Chemical Oscillations, Waves, and Turbulence (Springer, Berlin, 1984).
[21] Y. Kuramoto and I. Nishikawa, Statistical macrodynamics of large dynamical systems. Case of a plane transition in oscillator
communities, J. Stat. Phys. 49 (1987) 569-605.
[22] Y. Kuramoto and I. Nishikawa, Onset of collective rhythms in large populations of coupled oscillators, in: Cooperative
Dynamics in Complex Physical Systems, ed. H. Takayama (Springer, Berlin, 1989).
[23] S.K. Ma, Modern Theory of Critical Phenomena (Benjamin, New York, 1976).
[24] P.C. Matthews and S.H. Strogatz, Phase diagram for the collective behavior of limit-cycle oscillators, Phys. Rev. Lett. 65 (1990)
1701-1704.
[25] M.K. McClintock, Menstrual synchrony and suppression, Nature 229 (1971) 244-245.
[26] R.E. Mirollo and S.H. Strogatz, Amplitude death in an array of limit-cycle oscillators, J. Stat. Phys. 60 (1990) 245-262.
[27] R.F. Mirollo and S.H. Strogatz, Synchronization of pulse-coupled biological oscillators, SIAM J. Appl. Math. 5(1 (1990)
1645-1662.
[28] H. Sakaguchi, S. Shinomoto and Y. Kuramoto, Local and global self-entrainments in oscillator lattices, Progr. Theor. Phys. 77
(1987) 1005-1010.
[29] K. Satoh, Computer experiment on the cooperative behavior of a network of interacting nonlinear oscillators. J. Phys. Soc.
Japan 58 (1989) 2010-2021.
[30] H.G. Schuster, Deterministic Chaos: An Introduction, 2nd Ed. (VCH Publishers, Weinheim, 1989).
[3 I] M. Shiino, Nonequilibrium phase transition in systems of stochastically perturbed oscillators, Phys. Lett. A 111 (1985) 396-398.
[32] M. Shiino and M. Frankowicz, Synchronization of infinitely many coupled limit-cycle type oscillators. Phys. Lett. A 136 (1989)
103-108.
[33] E. Sismondo, Synchronous, alternating, and phase-locked stridulation by a tropical katydid, Science 249 (1990) 55-58.
[34] S.H. Strogatz, C.M. Marcus, R.E. Mirollo and R.M. Westervelt, Simple model of collective transport with phase slippage,
Phys. Rev. Lett. 61 (1988)2380-2383.
[35] S.H. Strogatz, C.M. Marcus, R.E. Mirollo and R.M. Westervelt, Collective dynamics of coupled oscillators with random
pinning, Physica D 36 (1989) 23-50.
[36] S.H. Strogatz and R.E. Mirollo, Phase-locking and critical phenomena in lattices of coupled nonlinear oscillators with random
intrinsic frequencies, Physica D 31 (1988) 143-168.
[37] S.H. Strogatz and R.E. Mirollo, Collective synchronisation in lattices of nonlinear oscillators with randomness, J. Phys. A 21
(1988) L699-L705.
[38] S.H. Strogatz and R.E. Mirollo, Stability of incoherence in a population of coupled oscillators, J. Stat. Phys. 63 (1991), to
appear.
[39] C.P. Taylor, How do seizures begin? Clues from hippocampal slices, Trends Neurosci. 11 (1988) 375-378.
[40] T.J. Walker, Acoustic synchrony: two mechanisms in the snowy tree cricket, Science 166 (1969) 891-894.
[41] K. Wiesenfeld and P. Hadley, Attractor crowding in oscillator arrays, Phys. Rev. Lett. 62 (1989) 1335-1338.
[42] K. Wiesenfeld, C. Tang and P. Bak, A physicist's sandbox, J. Stat. Phys. 54 (1989) 1441-1458.
[43] A.T. Winfree, Biological rhythms and the behavior of populations of coupled oscillators, J. Theor. Biol. 16 (1967) 15-42.
[44] A.T. Winfree, The Geometry of Biological Time (Springer, New York, 1980).
[45] S. Wolfram, Universality and complexity in cellular automata, Physica D 10 (1984) 1-35.
[46] Y. Yamaguchi, K. Kometani and H. Shimizu, Self-synchronization of nonlinear oscillations in the presence of fluctuations,
J. Star. Phys. 26 (1981) 719-743.
[47] Y. Yamaguchi and H. Shimizu, Theory of self-synchronization in the presence of native frequency distribution and external
noises, Physica D 11 (1984)212-226.