Exploring Synchronization in Complex Oscillator Networks
advertisement

TUTORIAL SESSION:
Synchronization in Coupled Oscillators:
Theory and Applications
Exploring Synchronization in
Complex Oscillator Networks
Florian Dörfler and Francesco Bullo
Florian Dörfler & Francesco Bullo
Center for Control,
Dynamical Systems, & Computation
Alexandre Mauroy, Pierre Sacré, & Rodolphe J. Sepulchre
University of California at Santa Barbara
Murat Arcak
http://motion.me.ucsb.edu
51st IEEE Conference on Decision and Control, Maui, HI
51st IEEE Conference on Decision and Control, Maui, HI
A Brief History of Sync
A Brief History of Sync
how it all began
the odd kind of sympathy is still fascinating
Christiaan Huygens (1629 – 1695)
physicist & mathematician
engineer & horologist
observed “an odd kind of sympathy ”
between coupled & heterogeneous clocks
watch movie online here:
http://www.youtube.com/watch?v=JWToUATLGzs&
list=UUJIyXclKY8FQQwaKBaawl A&index=3
[Letter to Royal Society of London, 1665]
Sync of 32 metronomes at Ikeguchi Laboratory, Saitama University, 2012
Recent reviews, experiments, & analysis
[M. Bennet et al. ’02, M. Kapitaniak et al. ’12]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
2 / 38
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
3 / 38
A Brief History of Sync
Coupled Phase Oscillators
a field was born
Sync in mathematical biology [A. Winfree ’80, S.H. Strogatz ’03, . . . ]
∃ various models of oscillators & interactions
Sync in physics and chemistry [Y. Kuramoto ’83, M. Mézard et al. ’87. . . ]
Today: canonical coupled oscillator model
[A. Winfree ’67, Y. Kuramoto ’75]
Sync in neural networks [F.C. Hoppensteadt and E.M. Izhikevich ’00, . . . ]
Coupled oscillator model:
Xn
θ̇i = ωi −
aij sin(θi − θj )
Sync in complex networks [C.W. Wu ’07, S. Bocaletti ’08, . . . ]
j=1
. . . and countless technological applications (reviewed later)
!2
n oscillators with phase θi ∈ S1
!3
a23
a12
non-identical natural frequencies ωi ∈ R1
a13
elastic coupling with strength aij = aji
undirected & connected graph G = (V, E, A)
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
4 / 38
Phenomenology and Challenges in Synchronization
Synchronization is a trade-off:
coupling vs. heterogeneity
θ̇i = ωi −
Xn
j=1
F. Dörfler and F. Bullo (UCSB)
!1
Sync in Complex Oscillator Networks
CDC 2012
5 / 38
CDC 2012
7 / 38
Applications of the Coupled Oscillator Model
aij sin(θi − θj )
Coupled oscillator model:
Xn
θ̇i = ωi −
aij sin(θi − θj )
j=1
coupling small & |ωi − ωj | large
⇒ incoherence & no sync
X
Some related applications:
centroid
✓i (t)
Sync in a population of fireflies
density
[G.B. Ermentrout ’90, Y. Zhou et al. ’06, . . . ]
coupling large & |ωi − ωj | small
⇒ coherence & frequency sync
Deep-brain stimulation and neuroscience
X
centroid
[N. Kopell et al. ’88, P.A. Tass ’03, . . . ]
✓i (t)
density
Sync in coupled Josephson junctions
[S. Watanabe et. al ’97, K. Wiesenfeld et al. ’98, . . . ]
Some central questions:
(still after 45 years of work)
F. Dörfler and F. Bullo (UCSB)
proper notion of sync & phase transition
quantify “coupling” vs. “heterogeneity”
interplay of network & dynamics
Sync in Complex Oscillator Networks
CDC 2012
6 / 38
Countless other sync phenomena in physics,
biology, chemistry, mechanics, social nets etc.
[A. Winfree ’67, S.H. Strogatz ’00, J. Acebrón ’01, . . . ]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
Example 1: AC Power Transmission Network
29
1
22
4
17
8
21
5
24
7
12
14
15
23
36
6
16
2
13
7
Di
32
3
θ1 + θ2 +
19
20
33
34
Yij
4
|Vi ||Vj ||Yij |
| {z }
j:
· sin θi − θj
aij =max power transfer
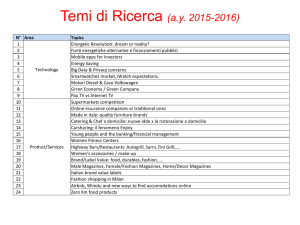
power balance at node i:
Pi
|{z}
X
=
power injection
j
inverter in microgrid
= controllable AC source
2
5
power transfer on line i
physics: Pi
3
`
•◦ :
Pl,i < 0 and Di ≥ 0
F. Dörfler and F. Bullo (UCSB)
−
aij sin(θi − θj )
Droop-control [M.C. Chandorkar et. al., ’93]:
X
Mi θ̈i + Di θ̇i = Pm,i −
aij sin(θi − θj )
j
X
aij sin(θi − θj )
Di θ̇i = Pl,i −
Closed-loop for inverters & load `:
[J.W. Simpson-Porco et. al., ’12]
CDC 2012
−
n
2
Di θ̇i = Pi∗ − Pi
`
Di θ̇i = Pi∗ − ai` sin(θi − θ` )
X
0 = P` −
a`j sin(θ` − θi )
j
j
Sync in Complex Oscillator Networks
θn +
−
1
= ai` sin(θi − θ` )
Structure-Preserving Model [A. Bergen & D. Hill ’81]:
: swing eq with Pm,i > 0
θ�
11
10
|Vi | ei✓i
35
28
18
31
Pl,i
|Vi | ei✓i
27
3
6
Yij
9
Pm,i
1
26
2
Yik
(islanded) microgrid =
autonomously managed
low-voltage network
9
38
25
Pn��
30
P2��
37
10
P1��
8
|Vj | ei✓j
1
Yij
39
|Vi | ei✓i
Example 2: DC/AC Inverters in Microgrids
8 / 38
F. Dörfler and F. Bullo (UCSB)
Example 3: Flocking, Schooling, & Vehicle Coordination
Sync in Complex Oscillator Networks
CDC 2012
9 / 38
Example 4: Canonical Coupled Oscillator Model
DCRN Chapter 3: Robotic network models and complexity notions
Network of Dubins’ vehicles
r=
ṙi = v e iθi
sensing/comm. graph G = (V, E, A) for
coordination of autonomous vehicles
relative sensing control ui = fi (θi − θj )
for neighbors {i, j} ∈ E yields closed-loop
X
θ̇i = ω0 (t) − K ·
aij sin(θi − θj )
j
φ
x
y
(x, y)
θ
ve
#
ẋ = f (x) + · δ(t)
(b)
K = +1
local phase dynamics near γ
with phase response curve Q(ϕ)
x1
Figure 3.1 A two-wheeled vehicle (a) and four-wheeled vehicle (b). In each case, the
orientation of the vehicle is indicated by the small triangle.
The unicycle. The controls v and ω take value in [−1, 1] and [−1, 1], respectively.
”phase
ϕ̇ =
Setsync”
v = (ωright + ωleft )/2 and ω = (ωright −
The differential drive robot.
ωleft )/2 and assume that both ωright and ωleft take value in [−1, 1].
✏ · Q(') (t)
'
⌦
Ω + · Q(ϕ)δ(t) + O(2 )
⇒ same phase reduction applied to interacting oscillators
TheKDubins
= 1 vehicle. The control v is set equal to 1 and the control ω
takes value in [−1, 1].
⇒ coord. & time transf. + averaging ⇒ θ̇i =
Finally, the four-wheeled planar vehicle, composed of a front and a rear axle
separated by a distance ", is described by the same dynamical system (3.1.2)
with the following distinctions: (x, y) ∈ R2 is the position of the midpoint
of the rear axle, θ ∈ S1 is the orientation of the rear axle, the control v is
the forward linear velocity of the rear axle, and the angular velocity satisfies
v
ω = tan φ, where the control φ is the steering angle of the vehicle.
•
"
”phase
balance”
⇒ 0th and 1st (odd) Fourier mode:
θ̇i = ωi +
Next, we generalize the notion of synchronous network introduced in Definition 1.38 and introduce a corresponding notion of robotic network.
Sync in Complex Oscillator Networks
)
The Reeds–Shepp car. The control v takes values in {−1, 0, 1} and the
control ω takes values in [−1, 1].
[R. Sepulchre et al. ’07, D. Klein et al. ’09, L Consolini et al ’10]
F. Dörfler and F. Bullo (UCSB)
✏ · (t)
θ
✓
(a)
x2
dynamical system with stable
limit cycle γ and weak perturb.
i✓i
(x, y)
θ̇i = ui (r , θ)
with speed v and steering control ui (r , θ)
P
P
j
hij (θi − θj )
j
aij sin(θi − θj )
[F.C. Hoppensteadt & E.M. Izhikevich ’00, Y. Kuramoto ’83, E. Brown et al. ’04, . . . ]
Definition 3.2 (Robotic network). The physical components of a robotic
F. Dörfler and F. Bullo (UCSB)
2012
10),/where
38
network S consist ofCDC
a tuple
(I, R, Ecmm
(i) I = {1, . . . , n}, I is called the set of unique identifiers (UIDs);
Sync in Complex Oscillator Networks
CDC 2012
11 / 38
gait cycle, a ‘configuration’ of the limbs is defined by the
joint angles at the hip, knee and ankle joints. As a person
walks, the gait cycle is repeated, and the configurations of
the limbs are revisited in a nearly periodic fashion.
the eigenstructure
of the(see
Laplacian
matrix
As elaborated
by linear
dynamic systems
(11) and
(17) for
a preview)in the time (full duplex, see Remark 2).!
NThe basic mechanism of con2π
and random [34] topologies. We will provide some comments
# i (t+
)isis
#
following
(and with
some details
GraphquantiTheory and tinuously
wherecoupled
whose
system matrix
is linearly
relatedinto“Algebraic
a key algebraic
clocks
locking
(seej (t
Figure
Each to
#̇ji(t ) −
=
εphase
α ij ·difference
f(#
) −with
#6).
)),
(10)
0 the phase
i (trespect
on these important cases in the following, and we point to refTi
j=1, phase
j!= iits phase
j, and
α ijthrough
Distributed
of particular
relevance
is the null node,node
and
are
detector-specific
G, namely
ith, f(·)
ty that
describes Synchronization”),
the connectivity graph
the Laplacian
say the
measures
detector (PD)features,
the
erences for further details.
space
of matrix
that isas
sometimes
referred
asthe
theadjasynchro- convex
namely
a nonlinear
function
and convex combination weights
L [32].
L = I − A,
A is
matrix
This isL,defined
where to
combination
of phase
differences
"N
subspace.
Specifically,
multiplicity
of the
(i.e., j=1 α ij = 1 and α ij ≥ 0),respectively (recall the discus0). It
i != j and [A]
cencynization
matrix of
the graph
([A] ij = αthe
ij for
ii =zero-eigenREMARK 3
N
!
λ(L)
= the
0 determines
value
whether
a synchronized
state is
sion in the previous
section). Notice that the choice of a convex
is then
clear
that
performance
of mutual
synchronization
$# i (t ) =
α ij · f(# j (t ) − # i (t )),
(9)
The (average) accuracy of different
eventually
achieved
or not,
while the
left
combination in (9)
ensures that the output of the phase detector
G) eigenvector
depends
on the network
topology
(connectivity
graph
through
j=1, j!= i
∆Φ2(t)
clocks is sometimes
measured in parts- T
T
PD the
v = [v1 · · · vN ]of corresponding
$# i (t ) takes values in the range between
minimum
and the
to λ(L)L.=As0elaborated
(v L = 0)inyields
the eigenstructure
the Laplacian matrix
the the
ε (s)
per-million (PPM) by calculating the
f (# j (t ) −with
# i (trespect
)). Finally,
steady-state
frequency
and phases
of the Graph
clocksTheory
(see (12),
maximum
# iphase
(t ) is differences
# j (t ) − of
following
(and with
some details
in “Algebraic
and (14),where
the phase difference
to the
average (absolute value of) the clock
) ij(9)are
and (19)Synchronization”),
for a preview).
is phase
fed to adetector-specific
loop filter ε(s), features,
whose output
j, and f(·)$#
Distributed
of particular relevance is the null
nodedifference
and
i (t α
∆Φ3(t)
error after one second. There exists a
s2(t) whichweights
a final
in the discussion
we synchrohave limited
drives
the voltage
controlled
(VCO),
updates the
L, remark,
space ofAs
matrix
that is sometimes
referred above,
to as the
namely
a nonlinear
function
andoscillator
convex combination
PD
VCO
ε
(s)
"N
clear trade-off between accuracy and
the subspace.
scope to time-invarying
deterministic
topologies, but (i.e., local
phase
as1 and α ij ≥ 0),respectively (recall the discusα ij =
nization
Specifically, the and
multiplicity
of the zero-eigenj=1
power consumption. For instance, accuanalysis
can be extended
to both
time-varying
[31],
λ(L)
= 0 determines
valuethe
whether
a synchronized
state
is [33] sion in the previous section). Notice that the choice of aT1convex
2
racies of typical clocks range between
N
!
2π
s
(t)
and random
[34]
topologies.
We
will
provide
some
comments
eventually
achieved
or
not,
while
the
left
eigenvector
combination
in
(9)
ensures that
the output of the phase detector
3
VCO
#̇ i (t ) =
+ ε0
α ij · f(# j (t ) − # i (t )),
(10)
aroundT 10−4 and 10−11 PPM with coron1 ·these
cases in
pointthe
to ref- $# i (t ) takes values
v = [v
· · vN ]important
= 0)weyields
λ(L)following,
= 0 (v T Land
range
between the minimum and the
corresponding
to the
Ti in the j=1,
j!= i
1
responding power consumptions on the
erences frequency
for furtherand
details.
f
(#
(t
)
−
#
(t
)).
steady-state
phases of the clocks (see (12), (14),
maximum
of
phase
differences
Finally,
the
j
i
T3
order of 1µW and hundreds of
and (19) for a preview).
difference $# i (t ) (9) is fed to a loop filter ε(s), whose output
megawatts, respectively [12].
3
AsREMARK
a final remark,
in the discussion above, we have limited
drives the voltage controlled oscillator∆Φ
(VCO),
which updates the
1(t)
PD
ε (s)
The (average)
accuracy
different topologies, but
the scope
to time-invarying
andofdeterministic
local phase as
CONTINUOUSLY
∆Φ2(t)
clocks iscan
sometimes
measured
in partsthe analysis
be extended
to both
time-varying [31], [33]
PD
COUPLED ANALOG CLOCKS
ε (s)
N
!
2π
per-million
by calculating
the some comments
and random
[34] (PPM)
topologies.
We will provide
#̇ i (t ) =
+ ε0
α ij · f(#
(t ) − # i (t )),
(10)
In this section, we study the problem of
s1j(t)
average
(absolute
the clock
on these
important
casesvalue
in theof)
following,
and we point to refTi
VCO
j=1, j!= i
distributed synchronization of coupled
∆Φ3(t)
error
onedetails.
second. There exists a
erences
forafter
further
s2(t)
1
PD
analog clocks. The interest of such probVCO
ε (s)
clear trade-off between accuracy and
T1
lem for wireless communications is relatpower3consumption. For instance, accuREMARK
1
ed to applications such as, e.g.,
T2
of typical
clocks
between
The racies
(average)
accuracy
of range
different
s
(t)
cooperative
beamforming
or frequency [FIG6]
3 Block
VCO
diagram of N = 3 continuously coupled oscillators
∆Φ2(t) (PD: phase detector; VCO:
10−4 andmeasured
10−11 PPM
around
with corclocks
is sometimes
in partsPD
division multiple access in ad hoc net- voltage controlled oscillator).
ε (s)
1
responding
power
on the
per-million
(PPM)
by consumptions
calculating the
T3
order
of 1µW
and
average
(absolute
value
of) hundreds
the clock of
∆Φ3(t)MAGAZINE [87] SEPTEMBER 2008
[12].exists a
errormegawatts,
after one respectively
second. There
IEEE SIGNAL PROCESSING
s (t)
PD
VCO
ε (s)
∆Φ12(t)
clear trade-off between accuracy and
PD
ε (s)
t
CONTINUOUSLY
power
consumption. For instance, accu1
T2
COUPLED
CLOCKS
racies
of typicalANALOG
clocks range
between
s3(t)
−11study
VCO
In this
10−4section,
around
and 10we
PPM the
withproblem
cor- of
s1(t)
VCO
distributed
synchronization
of coupled
1
responding
power
consumptions on
the
T3
1
analog
of suchofprob1µW The
order
of clocks.
and interest
hundreds
T1
lem for respectively
wireless communications
is relatmegawatts,
[12].
t
b t PD ∆Φ1(t) ε (s)
ed to applications such as, e.g.,
cooperative beamforming or frequency [FIG6] Block diagram of N = 3 continuously coupled oscillators (PD: phase detector; VCO:
CONTINUOUSLY
division
multipleCLOCKS
access in ad hoc net- voltage controlled oscillator).
COUPLED
ANALOG
t
B
In this section, we study the problem of
s1(t)
VCO
distributed synchronization of coupled
IEEE SIGNAL PROCESSING MAGAZINE [87] SEPTEMBER 2008
1
analog clocks. The interest of such probT1
lem for wireless communications is related to applications such as, e.g.,
cooperative beamforming or frequency [FIG6] Block diagram of N = 3 continuously coupled oscillators (PD: phase detector; VCO:
division multiple access in ad hoc net- voltage controlled oscillator).
Example 5: Other technological applications
Particle filtering to estimate limit
cycles [A. Tilton & P. Mehta et al. ’12]
Fig. 1: Single gait cycle.
Clock synchronization over networks
[Y. Hong & A. Scaglione ’05, O. Simeone Mathematically, an idealized gait cycle is represented as
a limit cycle (periodic orbit) in the phase space comprising
et al. ’08, Y. Wang & F. Doyle et al. ’12]
of joint angles and their velocities. An idealized gait cycle
may be obtained by numerically solving the Euler-Lagrange
Central pattern generators and equations of motion; cf., [3].
robotic locomotion [J. Nakanishi et al. In this paper, we take a phenomenological approach: We
use q to denote the state of the gait cycle at time t. The state
’04, S. Aoi et al. ’05, L. Righetti et al. ’06]
evolves on the circle [0, 2p], modeled here as a stochastic
differential equation (sde):
Decentralized maximum likelihood
q̇ = w + s Ḃ , mod 2p,
estimation [S. Barbarossa et al. ’07] where {Ḃ } is a white noise process, and w, s
(1)
are parameters that represent natural frequency of the gait cycle and
standard deviation of the process noise, respectively.
Carrier sync without phase-locked theThe
phenomenological model (1) is useful because we
loops [M. Rahman et al. ’11]
are interested, after all, only in estimating the state qt of
the gait cycle. The model can be rigorously justified by
employing a normal form reduction starting from the limit
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
12 / 38
cycle in the phase space; cf., [1]. For an idealized gait cycle,
the normal form reduction procedure establishes one-one
correspondence between the values of the phase angle qt
and the configuration of the joint angles, and their velocities
(for homogenous coupling aij = K /n)
in the phase space.
A small process noise is included in the phenomenological
P the small
model (1) iψ
Define the order parameter (centroid) by re to account
= n1 fornj=1
e iθi cycle-to-cycle
, then variability.
B. Observation Model
IEEE SIGNAL PROCESSING MAGAZINE [87] SEPTEMBER 2008
Order Parameter
θ̇i = ωi −
K Xn
sin(θi −θj )
j=1
n
Intuition: synchronization =
K small &
|ωi − ωj | large
Figure 2 depicts the Ankle Foot Orthosis (AFO) device
a pneumatic
θ̇i = ωi −The
Krdevice
sin(θincludes
⇔used in the experiments.
i − ψ)
power source, a rotary actuator at the ankle, and is equipped
with three sensors. The two force sensors on the bottom of
the foot are referred to as the iψ
heel sensor and the toe sensor.
entrainmentUnder
by normal
meanwalking
field conditions,
re
the toe and heel sensors
are approximately binary valued. For example, the heel
X
X
re
K large &
|ωi − ωj | small
i
r ei
density
density
⇒ analysis based on concepts from statistical mechanics & cont. limit:
[Y. Kuramoto ’75, G.B. Ermentrout ’85, J.D. Crawford ’94, S.H. Strogatz ’00,
J.A. Acebrón et al. ’05, E.A. Martens et al. ’09, H. Yin et al. ’12, . . . ]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
13 / 38
up to 12Nm at 120psi; D) Sensors: two force sensors under the heel
and toe, and potentiometer at the ankle joint [8].
Outline
sensor outputs one value when the foot is in contact with
the ground, and another value when it is not. In this paper,
we model the sensor response of each of the sensors with an
indicator
function:
1
⇢ +
hm
q 2 (fm1 , fm2 )
hm (q ) =
hm
otherwise,
2
where f 1 , f 2 , h+ , and h for m = 1, 2 are determined from
Introduction and motivation
Synchronization
notions, metrics, & basic insights
m m
m
m
the experimental data (see Sec. III).
Using the corresponding sensor’s response function
hm3(qt ), the observation model for each sensor is,
Phase synchronization and more basic insights
Ytm = hm (qt ) + smẆtm ,
Synchronization in complete networks
4 {Ẇ m } is an independent white noise processes, and
where
t
sm is the standard deviation for m = 1, 2. The noise term has
been included to account for the presence of sensor noise.
5
C. Filtering Problem
Synchronization in sparse networks
The objective of the filtering problem is to estimate the
posterior
distribution of qt given the history of observations
6
Yt := s (Ys1 ,Ys2 : s t). We denote the posterior distribution
by p⇤ (q ,t), so that for any measurable set A ⇢ [0, 2p],
Open problems and research directions
Z
A
p⇤ (q ,t) dq = P[qt 2 A|Yt ].
The
posterior
p⇤ (q ,t) represents
the ‘belief
F.
Dörfler
and F. distribution
Bullo (UCSB)
Sync in Complex
Oscillator Networks
state’ of the process qt given the history of observations.
Using the posterior, the estimate (conditional mean) is obtained as,
SynchronizationZ 2pNotions & Metrics
q̂t := E[qt |Yt ] =
0
q p⇤ (q ,t) dq .
In the
remainder ofsync:
this paper,
we describe
a coupled
1)
frequency
θ̇i (t)
= θ̇j (t)
∀ i, j
oscillator particle filter to approximate the filtering task.
⇔recall
θ̇i (t)
ωsyncfilter
∀ icomprises
∈ {1, .of. .N,stochastic
n}
Here, we
that=
a particle
processes {qti : 1 i N}, where the value qti 2 [0, 2p] is
the state for the ith particle at time t. For any measurable set
2) phase sync: θi (t) = formed
θj (t) by∀ the
i, jparticle
A ⇢ [0, 2p], the empirical distribution
population
defined
⇔ ris =
1 by,
CDC 2012
2)
X
✓i = \ei
3)
X
1 N
 1{qti 2 A}.
N
i=1 r = 0
balancing:
r ei = 0
p(N) (A,t) :=
3) phase
(e.g., splay state = uniform spacing on S1 )
12 / 38
4)
4) arc invariance: all angles in Arcn (γ)
(closed arc of length γ) for γ ∈ [0, 2π]
5) phase cohesiveness: all angles in
¯ G (γ) = θ ∈ Tn : max{i,j}∈E |θi − θj | ≤ γ
∆
for some γ ∈ [0, π/2[
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
5)
CDC 2012
14 / 38
Geometric & Algebraic Insights I
Geometric & Algebraic Insights II
symmetries
Jacobian is Laplacian
Coupled oscillator model:
Xn
θ̇i = f (θ) = ωi −
aij sin(θi −θj )
✓1 = ✓2
Coupled oscillator model:
Xn
θ̇i = f (θ) = ωi −
aij sin(θi −θj )
12
✓⇤
j=1
|✓1
θ̇i (t) =
i=1
n
P
!
ωi =
i=1
n
P
✓2 | ⇡/2
i=1
ωsync ⇒ sync frequ. ωsync = ωavg =
n
P
1
n
k=2
L(θ∗ ) =
ωi
i=1
wlog: assume ωavg = 0 ⇒ frequency sync = equilibrium manifold
[θ∗ ] = θ ∈ Tn : θ∗ + ϕ1n , f (θ∗ ) = 0 , ϕ ∈ [0, 2π]
Sync in Complex Oscillator Networks
✓⇤
CDC 2012
15 / 38
Geometric & Algebraic Insights II
|✓1
✓2 | ⇡/2
negative Jacobian −∂f /∂θ evaluated at θ∗ ∈ Tn is given by
Pn
∗
∗
∗
∗
⇒ transf. to rot. frame with freq. ωavg ⇔ ωsync = 0 ⇔ ωi 7→ ωi − ωavg
F. Dörfler and F. Bullo (UCSB)
12
j=1
vector field f (θ) possesses rotational symmetry: f (θ∗ ) = f (θ∗ + ϕ1n )
n
P
✓1 = ✓2
a1k cos(θ1 − θk )
.
.
.
−an1 cos(θn∗ − θ1∗ )
−a12 cos(θ1 − θ2 )
.
.
...
.
.
.
.
∗
−an,n−1 cos(θn∗ − θn−1
)
...
−a1n cos(θ1∗ − θn∗ )
n−1
P
k=1
.
.
.
ain cos(θn∗ − θk∗ )
= Laplacian matrix of graph (V, E, Ã) with weights ãij = aij cos(θi∗ −θj∗ )
⇒ all weights ãij > 0 for {i, j} ∈ E
⇔
max{i,j}∈E |θi∗ − θj∗ | < π/2
⇒ algebraic graph theory: L(θ∗ ) is p.s.d. and ker(L(θ∗ )) = span(1n )
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
16 / 38
Outline
Jacobian is Laplacian
Coupled oscillator model:
Xn
θ̇i = f (θ) = ωi −
aij sin(θi −θj )
✓1 = ✓2
12
✓⇤
j=1
|✓1
✓2 | ⇡/2
Lemma [C. Tavora and O.J.M. Smith ’72]
If there exists an equilibrium manifold [θ∗ ] in
∆G (π/2) = θ ∈ Tn : max{i,j}∈E |θi − θj | < π/2 ,
then [θ∗ ] is
1
locally exponentially stable (modulo symmetry), and
2
¯ G (π/2) (modulo symmetry).
unique in ∆
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
17 / 38
1
Introduction and motivation
2
Synchronization notions, metrics, & basic insights
3
Phase synchronization and more basic insights
4
Synchronization in complete networks
5
Synchronization in sparse networks
6
Open problems and research directions
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
17 / 38
Phase Synchronization
Phase Synchronization
a forced gradient system
main result
θ̇i = ωi −
Xn
j=1
aij sin(θi − θj )
{phase sync} = {θ ∈
Tn :
θi = θj ∀ i, j}
θ̇i = ωi −
Xn
j=1
aij sin(θi − θj )
{phase sync} = {θ ∈ Tn : θi = θj ∀ i, j}
Theorem: [P. Monzon et al. ’06, Sepulchre et al. ’07]
Classic intuition [P. Monzon et al. ’06, Sepulchre et al. ’07]:
Coupled oscillator model is forced gradient flow θ̇i = ωi − ∇i U(θ) ,
P
where U(θ) = {i,j}∈E aij 1 − cos(θi − θj ) (spring potential)
assume that ωi = 0 ∀ i ∈ {1, . . . , n} ⇒ gradient flow θ̇ = −∇U(θ)
The following statements are equivalent:
1
For all {i, j} ∈ {1, . . . , n}, we have that ωi = ωj ; and
2
There exists a locally exp. stable phase synchronization manifold.
Proof of “⇒”: wlog in rot. frame: ωi = ωj = 0 ⇒ follow previous args
⇒ global convergence to critical points {∇U(θ) = 0} ⊇ {phase sync}
Proof of “⇐”: phase sync’d solutions satisfy θi = θj & θ̇i = θ̇j ⇒ ωi = ωj
⇒ previous Jacobian arguments: {phase sync} is local minimum & stable
Remark: “almost global phase sync” for certain topologies
(trees, cmplt., short cycles) [P. Monzon, E.A. Canale et al. ’06-’10, A. Sarlette ’09]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
18 / 38
Phase Synchronization
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
19 / 38
Outline
further insights when all ωi = 0
θ̇i = ωi −
Xn
j=1
aij sin(θi − θj )
{phase sync} = {θ ∈ Tn : θi = θj ∀ i, j}
Convexity simplifies life:
1
Introduction and motivation
2
Synchronization notions, metrics, & basic insights
3
Phase synchronization and more basic insights
4
Synchronization in complete networks
5
Synchronization in sparse networks
6
Open problems and research directions
if all oscillators in open semicircle Arcn (π)
⇒ convex hull maxi,j∈{1,...,n} |θi (t) − θj (t)|
is contracting
max |✓i (t)
i,j
✓j (t)|
[L. Moreau ’04, Z. Lin et al. ’08]
Phase balancing:
inverse gradient flow (ascent) θ̇ = +∇U(θ)
⇒ phase balancing for circulant graphs
[L. Scardovi et al. ’07, Sepulchre et al. ’07]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
X
r ei = 0
CDC 2012
20 / 38
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
20 / 38
in aof
Complete
– Synchronization
Kron reduction
graphs& Homogeneous Graph
brief review
3
7
2
1
3
9
3
4
5
1
4
1
0
2
0
3
3
3
1
5
2
3
1
6
1
3
1
1
2
1
9
3
3
4
8
2
9
3
4
1
7
2
1
2
4
1
2
6
1
4
1
5
1
0
2
3
3
4
Necessary conditions: θ̇i = θ̇j
!sync
3
2
0
3
4
∀i, j ⇒
5
2
3
1
6
1
3
1
1
1
9
3
2
2
5
7
5
2
8
3
6
1
3
9
4
9
2
3
1
6
3
6
1
3
9
2
3
2
0
8
2
6
2
7
3
1
8
2
2
1
0
3
2
5
0
2
3
1
3
1
1
1
3
2
1
1
5
0
1
7
1
4
1
3
1
2
6
9
2
4
[D. AeyelsY
etreduced
al. ’04, R.E.=
Mirollo et al. ’05, M. Verwoerd et al. ’08]
Ynetwork
/Y interior
Some properties of theY
Kron
reduction
process:
network
5
2
2
2
4
1
2
6
4
3
7
2
1
7
1
7
5
7
1
3
2
2
1
7
3
5
8
4
5
7
3
2
9
2
8
1
8
8
8
2
6
2
7
3
6
4
9
3
4
9
2
5
2
8
3
3
5
One appropriate sync notion:
3
3
2
9
2
8
2
3
1
6
1
9
6
1
8
8
2
6
2
7
3
1
5
reduced =
Ynetwork
Ynetwork /Y interior
Implicit equations for existence of sync’d fixed points
1
9
θ ∈ Arcn (γ)
0
3
5
2
5
0
2
0
3
7
0
3
2
2
3
3
θ̇i = ωavg ∀ i
8
1
3
1
3
1
0
1
4
1
3
1
1
2
9
2
1
2
4
1
0
3
7
2
2
1
7
1
2
6
8
3
5
4
2
8
5
7
2
1
9
3
3
4
K>
ωmax −ωmin
2
·
n
Well-posedness: Symmetric & irreducible (loopy) Laplaciann−1
matrices
[N.
Chopra
et
al.
’09,
A.
Jadbabaie
et
al.
’04,
J.L.
van
Hemmen
et
al.
’93]
Some properties of
the
Kron
reduction
process:
can be reduced and are closed under Kron reduction
1
frequency sync: θ̇i = ωavg
Pn
with ωavg = n1
i=1 ωi
2
1
8
8
1
arc invariance: θ ∈ Arcn (γ)
for small γ ∈ [0, π/2[
3
9
1
2
7
3
2
9
6
1
8
2
6
6
K Xn
sin(θi − θj )
θ̇i = ωi −
j=1
n
9
2
5
0
3
6
3
3
6
8
0
frequency sync:
arc invariance:
7
Detour – Kron reduction of graphs
1
1
K Xn
θ̇i = ωi −
sin(θi − θj )
j=1
n
Y
7
Classic Kuramoto model of coupled oscillators:
1
recall definitions
3
9
Synchronization in a Complete & Homogeneous Graph
Detour
Numerous results on sync conditions & bifurcations
1
2 Topological
Well-posedness:
Symmetric
& irreducible (loopy) Laplacian matrices
properties:
Sufficient conditions, e.g., K > k(. . . , ωi −ωj , . . . )k2 , ∞ ·f (n, γ)
can be reduced and
are closed
Kron reduction
interior
networkunder
connected
reduced network complete
2
at leastChopra
one node
in interior network features a self-loop
Topological properties:
et al. ’09, G. Schmidt et al. ’09, F. Dörfler and F. Bullo ’09, S.J. Chung
[J.L. van Hemmen et al. ’93, A. Jadbabaie et al. ’04, F. de Smet et al. ’07, N.
all nodes
reduced
feature
and J.J.in
Slotine
’10, A.network
Franci
et al.
’10, S.Y.self-loops
Ha et al. ’10, . . . ]
interior network connected
reduced
network
complete
CDC 2012 3 21 / 38
and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
Algebraic
properties:
self-loops
in
interior network . . .
at least one
node F.inDörfler
interior
network
features
a self-loop
all nodes indecrease
reduced mutual
networkcoupling
feature in
self-loops
reduced network
[A. Jadbabaie et al. ’04, P. Monzon et al. ’06, Sepulchre et al. ’07, F. de Smet et al. ’07, N. Chopra et al. ’09, A. Franci et al.
’10, S.Y. Ha et al. ’10, D. Aeyels et al. ’04, , J.L. van Hemmen et al. ’93, R.E. Mirollo et al. ’05, M. Verwoerd et al. ’08, . . . ]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
Synchronization in a Complete & Homogeneous Graph
main result
3
K Xn
θ̇i = ωi −
sin(θi − θj )
j=1
n
Theorem [F. Dörfler & F. Bullo ’11]
frequency sync:
arc invariance:
2
3
Synchronization in a Complete & Homogeneous Graph
θ̇i =decrease
ωavg ∀ Florian
i mutual
in reduced
network
1 Arc invariance:
Dörflercoupling
(UCSB)
Power
Networks
Synchronization
Candidacy
31 / 3
θ(t)
in γ arc
⇔ arc-length Advancement
V (θ(t)) is tonon-increasing
θ ∈increase
Arcn (γ) self-loops in reduced network
Power Networks Synchronization ⇔
Florian Dörfler (UCSB)
V (✓(t))
Coupling dominates heterogeneity, i.e., K > Kcritical , ωmax − ωmin ;
∃ γmax ∈ ]π/2, π] s.t. all Kuramoto models with ωi ∈ [ωmin , ωmax ]
and θ(0) ∈ Arcn (γmax ) achieve exponential frequency sync; and
2
K
n
Moreover, we have Kcritical /K = sin(γmin ) = sin(γmax )
Sync in Complex Oscillator Networks
CDC 2012
23 / 38
Advancement to Candidacy
!
D + V (θ(t)) ≤
0
31 / 36
Frequency synchronization ⇔ consensus protocol in Rn
where aij (t) =
and practical phase synchronization: from γmax arc → γmin arc
V (θ(t)) = maxi,j∈{1,...,n} |θi (t) − θj (t)|
true if K sin(γ) ≥ Kcritical
∃ γmin ∈ [0, π/2[ s.t. all Kuramoto models with ωi ∈ [ωmin , ωmax ]
feature a locally exp. stable equilibrium manifold in Arcn (γmin ).
F. Dörfler and F. Bullo (UCSB)
22 / 38
mainself-loops
proof
ideas inininterior
increase
self-loops
reducednetwork
network . . .
Algebraic properties:
The following statements are equivalent:
1
CDC 2012
3
Xn
d
θ̇i = −
aij (t)(θ̇i − θ̇j ) ,
j=1
dt
cos(θi (t) − θj (t)) > 0 for all t ≥ T
Necessity: all results exact for bipolar distribution ωi ∈ {ωmin , ωmax }
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
24 / 38
Synchronization in a Complete & Homogeneous Graph
Synchronization in a Complete & Homogeneous Graph
robustness and extensions
scaling & statistical analysis
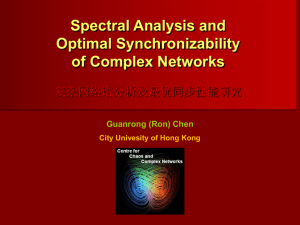
Switching natural frequencies: dwell-time assumption
10
3
2
1
0
0
5
10
5
0
−5
−10
0
5
10
γmax
2.5
1.5
γmin
1
0.5
0
5
10
t t[s]
6
4
θ̇(t)θ̇(t)
[rad/s]
θ(t)θ(t)
[rad]
Slowly time-varying: kω̈(t) − ω̈avg (t)k∞ sufficiently small
3
2
1.5
1
0.5
0
0
5
10
0
−2
−4
0
F. Dörfler and F. Bullo (UCSB)
X
3
2
t t[s]
5
K Xn
sin(θi − θj )
j=1
n
Cont. limit predicts largest Kcritical = 2 for bipolar distribution & smallest
Kcritical = 4/π for uniform distribution [Y. Kuramoto ’75, G.B. Ermentrout ’85]
2
t t[s]
2.5
θ̇i = ωi −
Kuramoto model with ωi ∈ [−1, 1]:
3
t
t [s]
2
X
Kcritical
θ̇(t) θ̇(t)
[rad/s]
θ(t)θ(t)
[rad]
4
(θ (t) [rad]
[rad]
VV(θ(t))
5
(θ (t) [rad]
[rad]
VV(θ(t))
1
10
γmax
2.5
4/π
2
1.5
γmin
1
0.5
t t[s]
Sync in Complex Oscillator Networks
0
5
n
10
t t[s]
CDC 2012
25 / 38
Outline
necessary bound (◦), sufficient & tight bound (), & exact & implicit bound (♦)
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
26 / 38
Primer on Algebraic Graph Theory
Undirected graph G = (V, E, A) with weight aij > 0 on edge {i, j}
1
Introduction and motivation
2
Synchronization notions, metrics, & basic insights
3
Phase synchronization and more basic insights
4
Synchronization in complete networks
adjacency matrix A = [aij ] ∈ Rn×n (induces the graph)
P
degree matrix D ∈ Rn×n is diagonal with dii = nj=1 aij
Laplacian matrix L = D − A ∈ Rn×n , L = LT ≥ 0
Notions of connectivity
topological: connectivity, path lengths, degree, etc.
5
Synchronization in sparse networks
6
Open problems and research directions
spectral: 2nd smallest eigenvalue of L is “algebraic connectivity” λ2 (L)
Notions of heterogeneity
kωkE,∞ = max{i,j}∈E |ωi − ωj |,
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
26 / 38
F. Dörfler and F. Bullo (UCSB)
kωkE,2 =
Sync in Complex Oscillator Networks
P
{i,j}∈E
|ωi − ωj |2
CDC 2012
1/2
27 / 38
Synchronization in Sparse Networks
Synchronization in Sparse Networks
a brief review I
a brief review II
θ̇i = ωi −
1
Xn
j=1
Assume connectivity &
P
ωavg = n1 ni=1 ωi = 0
aij sin(θi − θj )
necessary condition:
Pn
j=1 aij
≥ |ωi |
⇐
θ̇i = ωi −
sync
3
Assume connectivity &
P
ωavg = n1 ni=1 ωi = 0
aij sin(θi − θj )
sufficient condition II:
λ2 (L) > λcritical , kωkE,2
⇒
sync
Proof idea inspired by [A. Jadbabaie et al. ’04]: fixed point theorem with
Proof idea: θ̇i = 0 has no solution if condition is not true
sufficient condition I:
j=1
[F. Dörfler and F. Bullo ’11]
[C. Tavora and O.J.M. Smith ’72]
2
Xn
λ2 (L) > λcritical , kωkEcmplt ,2
incremental 2-norms; condition implies kθ∗ kE,2 ≤ λcritical /λ2 (L)
⇒
sync
⇒ ∃ similar conditions with diff. metrics on coupling & heterogeneity
[F. Dörfler and F. Bullo ’09]
Proof idea: analogous Lyapunov proof with V (θ) =
P
i<j
|θi − θj |2 ;
condition also implies θ∗ ∈ Arcn (λcritical /λ2 (L)) ⇒ evtl. too strong!
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
28 / 38
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
Synchronization in Sparse Networks
A Nearly Exact Synchronization Condition
problems . . .
a “back of the envelope calculation”
Problems: the sharpest general nec. & suff. conditions known to date
Pn
j=1 aij
< |ωi |
,
λ2 (L) > kωkEcmplt ,2
, and
λ2 (L) > kωkE,2
have a large gap and are conservative !
2
3
j=1
(??)
j=1
Unique solution (modulo symmetry) of (??) is δ ∗ = L† ω
conservative bounding of trigs & network interactions
conditions θ∗ ∈ Arcn λλcritical
or kθ∗ kE,2 ≤ λλcritical
are too strong
(L)
2
2 (L)
⇒ Solution ansatz for (?):
analysis with 2-norm is conservative
ωi =
Open problem: quantify “coupling/connectivity” vs. “heterogeneity”
[S. Strogatz ’00 & ’01, J. Acebrón et al. ’00, A. Arenas et al. ’08, S. Boccaletti et al. ’06]
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
29 / 38
¯ G (γ), then it is unique and stable
Recall: if ∃ equilibrium [θ∗ ] ∈ ∆
Xn
ωi =
aij sin(θi − θj )
(?)
Consider linear “small-angle” approximation of (?) :
Xn
ωi =
aij (δi − δj )
⇔
ω = Lδ
Why?
1
CDC 2012
30 / 38
Xn
j=1
θi∗ − θj∗ = arcsin(δi∗ − δj∗ )
aij sin(θi − θj ) =
⇒ Theorem: (for a tree)
F. Dörfler and F. Bullo (UCSB)
Xn
j=1
(for a tree)
aij sin arcsin(δi∗ − δj∗ ) = ωi
X
¯ G (γ) ⇔ L† ω ∃ [θ∗ ] ∈ ∆
≤ sin(γ)
E,∞
Sync in Complex Oscillator Networks
CDC 2012
31 / 38
A Nearly Exact Synchronization Condition
A Nearly Exact Synchronization Condition
comments
Theorem [F. Dörfler, M. Chertkov, and F. Bullo ’12]
Statistical correctness through Monte Carlo simulations: construct
nominal randomized graph topologies, weights, & natural frequencies
Under one of following assumptions:
1) graph is either tree, homogeneous, or short cycle (n ∈ {3, 4})
2) natural frequencies: L† ω is bipolar, small, or symmetric (for cycles)
Intuition: the condition
† L ω ≤ sin(γ)
E,∞
where γ < π/2
0
0
eigenvectors of L ..
.
0
⇒ ∃ a unique & locally exponentially stable equilibrium manifold in
¯ G (γ) = θ ∈ Tn | max{i,j}∈E |θi − θj | ≤ γ .
∆
F. Dörfler and F. Bullo (UCSB)
with high accuracy
Possibly thin sets of degenerate counter-examples for large cycles
3) arbitrary one-connected combinations of 1) and 2)
If
⇒ sync “for almost all graphs G (V, E, A) & ω ”
Sync in Complex Oscillator Networks
...
0
..
.
...
0
1
λ2 (L)
..
.
...
† L ω ≤ sin(γ)
E,∞
...
...
..
.
0
is equivalent to
0
0
T
eigenvectors of L ω
0
1
λn (L)
E,∞
⇒ includes previous conditions on λ2 (L) and degree (≈ λn (L))
CDC 2012
32 / 38
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
A Nearly Exact Synchronization Condition
A Nearly Exact Synchronization Condition
statistical analysis for power networks
statistical analysis for complex networks
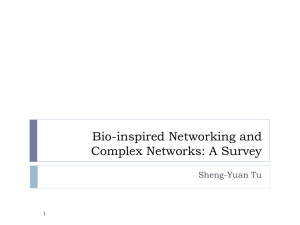
Randomized power network test cases
θ̇i = ωi − K ·
Comparison with exact Kcritical for
with 50 % randomized loads and 33 % randomized generation
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
E,1
0.9
0.9
K/ L† !
K
K
n = 10
n = 20
0.25
0.5
pp
0.75
0.75
0.25
1
0.5
pp
0.75
1
(d)
Student Version of MATLAB
Student Version of MATLAB
0.9
K/ L† !
K
K
0.5
pp
p
0.7
1
(e)
0.9
0.25
0.4
1
n = 40
1
0.75
1
0.75
0.25
0.5
pp
0.75
1
(f )
Student Version of MATLAB
F. Dörfler and F. Bullo (UCSB)
n = 80
0.9
n = 160
0.75
0.1
0.4
p
0.7
1
⇒ condition L† ω E,∞ ≤ sin(γ) is extremely accurate for γ = π/2
Student Version of MATLAB
34 / 38
0.75
0.1
1
E,1
0.75
0.75
⇒ condition L† ω E,∞ ≤ sin(γ) is extremely accurate for γ ≤ 25◦
(c)
E,1
0.9
K/ L† !
0.12889 rad
0.16622 rad
0.22309 rad
0.1643 rad
0.16821 rad
0.20295 rad
0.24593 rad
0.23524 rad
0.43204 rad
0.25144 rad
E,1
rad
rad
rad
rad
rad
rad
rad
rad
rad
rad
−
1
K/ L† !
4.1218 · 10−5
2.7995 · 10−4
1.7089 · 10−3
2.6140 · 10−4
6.6355 · 10−5
2.0630 · 10−2
2.6076 · 10−3
5.9959 · 10−4
5.2618 · 10−4
4.2183 · 10−3
max
{i,j}∈E
sin(θi − θj )
j=1 aij
(b)
(a)
θj∗ |
E,1
− arcsin(kL ωkE,∞ )
|θi∗
K/ L† !
true
true
true
true
true
true
true
true
true
true
≤γ
†
E,1
always
always
always
always
always
always
always
always
always
always
−
{i,j}∈E
Pn
33 / 38
Small World Network
1
1
K/ L !
9 bus system
IEEE 14 bus system
IEEE RTS 24
IEEE 30 bus system
New England 39
IEEE 57 bus system
IEEE RTS 96
IEEE 118 bus system
IEEE 300 bus system
Polish 2383 bus system
(winter peak 1999/2000)
max
{i,j}∈E
θj∗ |
Random Geometric Graph
Erdös-Rényi Graph
Phase
cohesiveness:
! bipolar
⇒
|θi∗
Accuracy of condition:
max |θi∗ − θj∗ |
†
Correctness of condition:
kL† ωkE,∞ ≤ sin(γ)
! uniform
Randomized test case
(1000 instances)
≤ sin(γ)
Student Version of MATLAB
Sync in Complex Oscillator Networks
Student Version of MATLAB
CDC 2012
35 / 38
Outline
Exciting Open Problems and Research Directions
1
Introduction and motivation
1
Q: What about networks of second-order oscillators ?
Xn
Mi θ̈i + Di θ̇i = ωi −
aij sin(θi − θj )
j=1
2
Synchronization notions, metrics, & basic insights
3
Phase synchronization and more basic insights
4
Synchronization in complete networks
Apps: mechanics, synchronous generators, Josephson junctions, . . .
Problems: kinetic energy is a mixed blessing for transient dynamics
2
e.g., directed graphs: aij 6= aji or phase shifts: aij sin(θi − θj − ϕij )
Synchronization in sparse networks
5
Apps: sync protocols, lossy circuits, phase/time-delays, flocking, . . .
Problems: algebraic & geometric symmetries are broken
Open problems and research directions
6
3
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
35 / 38
Exciting Open Problems and Research Directions
4
Q: What about asymmetric interactions ?
Q: How to derive sharper results for heterogeneous networks ?
F. Dörfler and F. Bullo (UCSB)
CDC 2012
36 / 38
Conclusions
Q: What about the transient dynamics beyond Arcn (π), general
equilibria beyond ∆G (π/2), or the basin of attraction ?
Coupled oscillator model:
Apps: phase balancing, volatile power networks, flocking, . . .
5
Sync in Complex Oscillator Networks
Xn
Problems: lack of analysis tools (only for simple cases), chaos, . . .
θ̇i = ωi −
Q: Beyond continuous, sinusoidal, and diffusive coupling ?
X
θ̇i ∈ ωi −
fij (θi , θj ) , θ ∈ C ⊂ Tn
{i,j}∈E
X
θi+ ∈ θi +
gij (θi , θj ) , θ ∈ D ⊂ Tn
history: from Huygens’ clocks to power grids
j=1
aij sin(θi − θj )
applications in sciences, biology, & technology
!2
synchronization phenomenology
{i,j}∈E
!3
a23
a12
Apps: impulsive coupling, relaxation oscillators, neuroscience, . . .
a13
network aspects & heterogeneity
Problems: lack of analysis tools, coping with heterogeneity, . . .
available analysis tools & results
6
!1
Q: Does anything extend from phase to state space oscillators ?
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
37 / 38
F. Dörfler and F. Bullo (UCSB)
Sync in Complex Oscillator Networks
CDC 2012
38 / 38