Proceedings of the 16th ASIA PACIFIC VIBRATION CONFERENCE
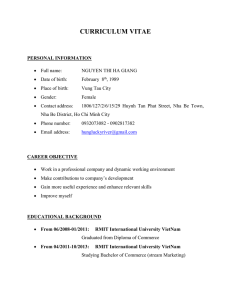
advertisement

Proceedings of the 16th ASIA PACIFIC VIBRATION CONFERENCE Edited by: Yoshihiro Narita, Nguyen Van Khang, and Nguyen Quang Hoang Organized by: Vietnam Association of Mechanics (VAM) Hanoi University of Science and Technology (HUST) Bachkhoa Publishing House, Hanoi 2015 Proceedings of the 16th ASIA PACIFIC VIBRATION CONFERENCE 24-26 November, 2015 Hanoi, Vietnam Edited by: Prof. Yoshihiro Narita (Hokkaido University, Japan) Prof. Nguyen Van Khang (Hanoi University of Science and Technology, Vietnam) Dr. Nguyen Quang Hoang (Hanoi University of Science and Technology, Vietnam) Organized by: Vietnam Association of Mechanics (VAM) Hanoi University of Science and Technology (HUST) Bachkhoa Publishing House, Hanoi 2015 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 International Organizing Committee Chairman Yoshihiro Narita (Hokkaido University, Japan) Members Shigehiko Kaneko (University of Tokyo, Japan) Andy C.C. Tan (Queensland University of Technology, Australia) Nong Zhang (University of Technology, Sydney, Australia) Athol J. Carr (University of Canterbury, New Zealand) Hong Hee Yoo (Hanyang University, Korea) Youngjin Park (KAIST, Korea) M. Salman Leong (University of Technology, Malaysia) R. Abdul Rahman (University of Technology, Malaysia) Li Cheng (Hong Kong Polytechnic University, Hong Kong) Takuya Yoshimura (Tokyo Metropolitan University, Japan) Yi Min Zhang (Northeastern University, China) Zhi Chao Hou (Tsinghua University, China) Nguyen Van Khang (Hanoi University of Science and Technology, Vietnam) Honorable Advisory Board Dr. Nguyen Quan (Minister, Ministry of Science and Technology) Prof. Duong Ngoc Hai (Vice-President, Vietnam Academy of Science and Technology) Dr. Tran Viet Hung (Vice-President, Vietnam Union of Science and Technology Association) Prof. Nguyen Hoa Thinh (President, Vietnam Association of Mechanics) Local Programming Committee Chairman Nguyen Van Khang (HUST, Hanoi) Members Nguyen Dong Anh (IMECH, Hanoi), Dao Huy Bich (VNU, Hanoi) Nguyen Phong Dien (HUST, Hanoi) Nguyen Dinh Duc (VNU, Hanoi) Nguyen Dung (IAMI, Hochiminh City) Hoang Ha (Ministry of Transport, Hanoi) Pham Duy Hoa (University of Civil Engineering, Hanoi) Nguyen Tien Khiem (IMECH, Hanoi) Vu Van Khiem (MOST, Hochiminh City) Ngo Kieu Nhi (HCMUT, Hochiminh City) iii 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Dinh Van Phong (HUST, Hanoi) Do Kien Quoc (HCMUT, Hochiminh City) Nguyen Chi Sang (NARIME, Hanoi) Do Sanh (HUST, Hanoi) Le Luong Tai (Thai Nguyen University, Thainguyen) Tran Ich Thinh (HUST, Hanoi) Local Organizing Committee Co-Chairs Nguyen Phong Dien, Dinh Van Phong (HUST) Members Pham Thanh Chung (HUST, Hanoi) Hoang Manh Cuong (Maritime University, Haiphong) Nguyen Van Du (Thai Nguyen University, Thainguyen) Le Thai Hoa (VNU, Hanoi) Trieu Quoc Loc (National Ins. Labour Protection, Hanoi) Phan Dang Phong (NARIME, Hanoi) Nguyen Trong Phuoc (HCMUT, Hochiminh City) Nguyen Minh Phuong (HUST, Hanoi) Nguyen Van Quyen (HUST, Hanoi) Tran Dinh Son (University Mining and Geology, Hanoi) Nguyen Xuan Thanh (University of Civil Engineering, Hanoi) Nguyen Xuan Toan (DUT, Danang) La Duc Viet (IMECH, Hanoi) Conference location Hanoi University of Science and Technology 1 Dai Co Viet Road, Hanoi, Vietnam iv 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 CONTENTS Section A. Vibration of Continuous Systems and Structural Dynamics Sound Projection and Capture Semyung Wang, Kihyun Kim and Homin Ryu 1 Study on power generation with in-flow fluidelastic instability Tomomichi Nakamura, Takuya Sumitani and Joji Yamada 6 Overall Stiffness Identification of Short – Span Bridges Based on Change in Representative Power Spectral Density Kieu Nhi – NGO, QuangThanh – NGUYEN, BaoToan – PHAM, Da Thao – NGUYEN Proposing a New Feature of Short – Span Bridges under Real Traffic for Damage Dectection KieuNhi-Ngo, BaoToan-Pham, QuangThanh-Nguyen Study the effects of applied tension and position of “cap magnets” on self-oscillating frequency of a taut membrane under aerodynamic load VU Dinh Quy 13 21 28 Dynamic Behavior of Cantilever Beam with Slightly Gapped Support under Random Excitation Shozo Kawamura, Kyosuke Imamura, Masami Matsubara 32 Linear density identification of beams with free-free boundary condition Masami Matsubara, Akihiro Aono, Shozo Kawamura 37 A Wavelet-decomposed Semi-analytical Model for Flexural Vibration of a Beam with Acoustic Black Hole Effect Liling TANG, Su ZHANG, Hongli JI, Jinhao QIU and Li CHENG 42 Vibration analysis of a rotating blade composed of functionally graded materials Yutaek Oh, Hong Hee Yoo 50 Evaluation of damping properties of damping beam with natural rubber/cellulose composites Masami Matsubara, Shozo Kawamura, Asahiro Nagatani, Nobutaka Tsujiuchi, Akihito Ito 54 Finite element analysis of APR1400 nuclear reactor Jong-beom Park, No-Cheol Park, Sang Jeong Lee, Woo-Jin Roh 59 Vibration and stability analysis of functionally graded carbon nanotube-reinforced composite beams immersed in axial pulsating fluid Hossein Hemmati, Hassan Nahvi 63 Benchmark Test Function for Assessing the Lay-up Optimization Methods in Plate Vibration Toshiya Hayashi, Shinya Honda, Yoshihiro Narita 69 Free Vibration Analysis of Cantilevered Symmetrically laminated Plates with Attached Mass Kenji Hosokawa, Tatsuro Ohashi 77 An experimental study on anechoic vibrations of a beam with wedge-shape and damping treatment Soon-woo Seo, Kwang-joon Kim 81 v 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Vibration optimization of composite sandwich plate with soft core by using refined zigzag theory Shinya Honda, Takahito Kumagai, Yoshihiro Narita Smoothed particle hydrodynamics simulation of aquatic propulsion mechanism by using vibrating elastic plate Masashi Sasuga, Hirosuke Horii, Nobuyuki Furuya, Yuichi Matsumura, Kohei Furuya Vibration Analysis of a Floating Platform for an Offshore Wind Turbine Joong Hyeok Lee, Jin Ho Ahn, Jun Ho Byun, Byeonghee Kim, and Seockhyun Kim 87 93 99 Study on Seismic Evaluation System of Elevator Rope Yuta Shimura,Satoshi Fujita, Keisuke Minagawa 103 Development of Escalator Vibration Analytical Model during Earthquake Koji NARIYA, Yudai TANAKA, Satoshi FUJITA, and Osamu TAKAHASHI 108 Dynamic Analysis for Vertical Movement of Elevator Governor Tension Sheave Kotaro Fukui, Seiji Watanabe, Masaki Kato, Takeshi Niikawa 113 Estimation of main cable tension of the suspension bridge Nguyen Huu Hung 119 Transfer-matrix-based approach for an eigenvalue problem of a drum-like rectangular cavity Hiroyuki Iwamoto, Nobuo Tanaka 126 Transverse Motion of the Plate Spring that Automatically Follows the Excitation Frequency Takuya Kishida, Kazumasa Ohama, Takumi Inoue, Ren Kadowaki, Kazuhisa Ohmura 131 FEM Analysis Considering Air Viscosity in Narrow Rectangular-Closs Section Pathway Manabu Sasajima, Takao Yamaguchi, Mitsuharu Watanabe, Yoshio Koike 137 Sloshing Phenomenon Analysis by Using Concentrated Mass Model Tatsuhiro Yoshitake, Satoshi Ishikawa, Takahiro Kondou, Kenichiro Matsuzaki 142 Study on Reliability Enhancement of Seismic Risk Assessment of NPP as Risk Management Fundamentals (Evaluation of Seismic Response for Quantifying Epistemic Uncertainty on Fragility Assessment of Equipment and Piping) Osamu FURUYA, Sho ASAOKA, Ken MURAMATSU, Shigeru FUJIMOTO, Hitoshi MUTA 149 A Novel Analytical Method to Assess Transient Coupled Vibration of a Tall Building Against Downburst Windstorms Thai-Hoa Le, Luca Caracoglia 154 Exploring the Simulation of the Stochastic Response of a Tall Building in a Tornado-like Wind Thai-Hoa Le, Luca Caracoglia 162 Application of Wavelet Transform to Damage Detection in Plates using Response-only Measurements Muyideen Abdulkareem, Norhisham Bakhary, Mohammadreza Vafaei 170 Study on Seismic Enhancement Method of Hanging Type Mechanical Structure in Industrial Facilities Osamu FURUYA, Kazuhiro YOSHIDA, Keiji OGATA and Nobuhiro NIIYAMA 177 Study, design and fabrication of “micro-electrical-generator” based on the principle of flutter phenomenon NGUYEN Van Sy, VU Dinh Quy, DINH Tan Hung 183 vi 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Finite element vibration analysis of viscoelastic composite structures Zhicheng Huang, Zhaoye Qin and Fulei Chu Determination of Dynamic Impact Factor for Continuous bridge and Cable-stayed bridge due to vehicle braking force with experimental investigation Toan Xuan NGUYEN, Duc Van TRAN 191 196 Response Analysis of Multiple Supported Elastic-Plastic Piping Systems for Estimating Its Maximum Response 204 Tomoyuki Matsuda, Nanako Miura, Akira Sone, Thuan Nguyen Xuan Buckling Analysis of Laminated Shallow Shells under General Form Pressure and Boundary Condition Tatsuya Tampo, Shinya Honda, Yoshihiro Narita 212 Study of Rolled Multi-Layer Cylindrical Shell in Frequency Domain Can Nerse, Semyung Wang 218 Reduction of wave propagation from a curved beam to straight beams Yuichi MATSUMURA, Kohei FURUYA, Tuyen NGUYEN BA, Hirotaka SHIOZAKI 222 Broadband Piezoelectric Energy Harvester Using a Mass Attached Near the Fixed-end Sin Woo JEONG, Hong Hee YOO 228 Application of gas-spring damper to furniture fixture devices, a suggestion to prevent human damages in huge earthquakes Yukiko ISHIHARA, Satoshi FUJITA, Keisuke MINAGAWA Structural Optimization of SEA Subsystems using Finite Element Model Katsuhiko KURODA 232 237 Dynamic response of beam on a new foundation model subjected to a moving oscillator by finite element method PHAM Dinh Trung, HOANG Phuong Hoa and NGUYEN Trong Phuoc 244 Nonlinear dynamic analysis of imperfect eccentrically stiffened S-FGM thick circular cylindrical shells on elastic foundations and subjected to mechanical loads Nguyen Dinh Duc, Tran Quoc Quan 251 Vehicle-Cable stayed bridge Dynamic Interaction considering the vehicle braking effects using the Finite Element Method Toan Xuan Nguyen, Duc Van Tran 260 Nonlinear Vibration of eccentrically Stiffened Functionally Graded Toroidal Shell Segments Surrounded by an Elastic Medium Dao Huy Bich, Dinh Gia Ninh, Bui Huy Kien 268 Application the frequency response function to evaluate the tuned liquid damper system at the tower of Baichay cable stayed Bridge in Viet Nam Nguyen Duc Thi Thu Dinh, Nguyen Viet Trung and Nguyen Huu Hung 278 Axisymmetric Free vibration of Layered Conical Shells using Chebyshev Polynomial with Collocation Method K.K.Viswanathan, Z.A. Aziz, J.H. Lee, M.D. Nurul Izyan 286 vii 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Section B. Vibration of Discrete Systems and Machine Dynamics Development and Investigation of an Energy-Regenerative MR Damper Satoru Akao, Tomoki Sakurai, Shin Morishita Analytical Research on Dynamic Characteristics of Rolling Agricultural Tire (Investigation of Lug Excitation Force Characteristics) Katsuhide Fujita, Takashi Saito, Mitsugu Kaneko 295 300 Evaluation of dynamic characteristics of the rubber element with and without constraint Shozo Kawamura, Ryosuke Isoda, Masami Matsubara 307 Proposition of a judgment method of proper paths in the transfer path analysis Shozo Kawamura, Kota Itadani, Masami Matsubara 312 Hunting Behavior of the High Speed Railway Vehicle on a Curved Track Yuto Yoshida, Yuki Kunimatsu, Shoichiro Takehara, Yoshiaki Terumichi 318 Vibration suppression of the large eccentric rotor by using externally pressurized gas journal bearings with asymmetrically arranged gas supply holes Tomohiko Ise, Takaaki Itoga, Kazuya Imanishi, Toshihiko Asami 324 Development of an Assistance System for a Two Wheeled Vehicle Using a Vibrator Thai Quoc PHAM, Chihiro NAKAGAWA, Atsuhiko SHINTANI, and Tomohiro ITO 329 On the computation of the vibration of foil-air bearing – rotor systems Minh-Hai PHAM, Xuan-Ha NGUYEN and Bao-Lam DANG 336 Rocking Vibration of Rigid Block under Simulated Seismic Wave ManYong Jeong, Keita Aoshima 342 Influence on Rocking Vibration Characteristics by Minute Change of System Parameters ManYong JEONG, Yuto Suzuki 352 Visualization of Strain Distribution in Gear Teeth under Operation by Photo-Elasticity Technique Daisuke Yamazaki,Yusuke Hasebe,Toshihiko Shiraishi,Shin Morishita 361 Dynamics and Control of Clutchless AMTs Paul D WALKER, Yuhong Fang, Holger Roser, Nong Zhang 368 On an approximate technique for Fokker-Planck-Kolmogorov equation in the theory of random vibration D.N. Hao, N.D. Anh, N.C. Thang 374 Effect of radial contact area of brake pad on in-plane squeal of automotive disk brake Yutaka Nakano, Hiroki Takahara, Noriyuki Shirasuna 380 Pedestal design for resonance separation Hyeon-Tak Yu, Jong-Myeong Lee, Gyu-Jin Park , Hack-Eun Kim and Byeong-Keun Choi 386 Research on natural vibration characteristics for change of a sliding part in a reciprocating compressor Yoshifumi MORI, Takenori NAKAMURA, Katsuhide FUJITA and Takashi SAITO 391 Analysis of coupling vibration between tire flexible ring and rigid wheel model Masami MATSUBARA, Makoto HORIUCHI, Shozo KAWAMURA, Fumihiko KOSAKA 395 viii 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Small and simple isolation table using coil springs Taichi Matsuoka, Tomonori Niwa, Tenma Takayanagi, Kenichiro Ohmata 400 Study on wear behavior analysis of tire using the distributed lumped mass-spring model Yu Koketsu, Shoichiro Takehara, Yoshiaki Terumichi, Zenichiro Shida, Toshiyuki Ikeda 406 Geometric illustration of several stochastic equivalent linearization criteria Anh NGUYEN DONG, Linh NGUYEN NGOC 413 Basic Research on a Novel Zero-Emission Public Transportation System (Investigation of Consumption Energy using a Simple Electric Bus Simulator for an Electric Bus System with Rapid Charging at Every Bus Stop using Renewable Energy) Takeshi Kawashima 419 Dynamic model of rocking vibration for free standing spent fuel rack Akihiro TAKAI and Shigehiko KANEKO 427 An analytic study on the Structural Safety of Two-spindle System Min Jae Shin, Dong Il Kim, Jae Deok Hwang, Chae Sil Kim, and Hun Oh Choi 435 Inverse Sub-structuring Theory for Coupled Mechanical System with Incomplete Measured Data based on the Dummy Masses Qi-li Wang, Jun Wang, Li-xin Lu, An-jun Chen, Huan-xin Jiang 440 Dynamic modeling and investigation on the electromagnetic vibration of an eccentric rotor with bearing forces Xueping Xu, Qinkai Han, and Fulei Chu 448 Rub-impact Analysis of a Disk-drum Rotor System Lumiao Chen, Zhaoye Qin, and Fulei Chu 456 Simulation and Analyses of Dynamic Gust Responses of a Flexible Aircraft Wing under Continuous Random Atmospheric Turbulence Anh Tuan Nguyen, Jae-Hung Han 461 Analytical model building and vibration reduction of drum-type washing machines at high rotational speeds Nobutaka TSUJIUCHI, Akihito ITO, Mami YOSHIDOMI, Hiroki SATO 468 Fundamental study of subharmonic vibration in automatic transmission Akihiro NANBA, Takashi NAKAE, Takahiro RYU, Kenichiro MATSUZAKI, Sofian ROSBI, Yoshihiro TAKIKAWA, Yoichi OOI, Atsuo SUEOKA 475 A fractal friction contact model and its application in forced response analysis of a shrouded blade Hengbin Qiu, Zili Xu, Chunmei Zhang 483 A Study for LNG Pump Shaft Balancing by the Rig Yong Ho Jang, Hyo Jung Kim, Jong Myeong Lee, Sun Hwi Park, Hack Eun Kim, and Byeong Keun Choi 491 Research and Development of Laminated Bearing for Base-Isolation System using Urethane Elastomer Kenta Ishihana, Osamu Furuya, Kengo Goda, Shohei Omata 494 Effects of the Non-linear Restoring Force Characteristics of the Rubber Bearings on Seismic Isolated Building Yuki HASE, Satoshi FUJITA, Keisuke MINAGAWA 500 Analysis of Pulse Wave in Blood Vessel by Concentrated Mass Model Satoshi Ishikawa, Takahiro Kondou, Kenichiro Matsuzaki 506 ix 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Dynamic Stability Derivative Measurement of the MAV Model Using Magnetic Suspension Balance System Chang-Beom Kwon, Dong-Kyu Lee, Jae-San Yoon and Jae-Hung Han Multi-physical analysis of an eddy current damper (ECD) for a reaction force compensation (RFC) mechanism of a linear motor motion stage Kang Jo Hwang, Canh Nguyen, Jae Seong Jeong, Hyeong Joon Ahn Detection of blade rub in rotor system W. K. Ngui, M. Salman Leong, M. H. Lim, and K. H. Hui A Hybrid Method of Support Vector Machine and Dempster-Shafer Theory for Automated Bearing Fault Diagnosis K.H.HUI, L.M.HEE, M. Salman LEONG, M.K. ZAKARIA, and W.K. NGUI 512 516 521 525 A Method for Solving the Motion Equations of Constrained Systems Sanh Do, Phong Dinh Van, Khoa Do Dang, Tran Duc 532 Reliability Analysis of Motorized Spindle based on ANSYS and BP Neural Networks Zhou Yang, Panxue Liu, Hao Wang, Yimin Zhang and Xianzhen Huang 538 Torsional rigidity analysis of cycloid reducers considering tolerances TheLinh TRAN, AnhDuc PHAM, ChungIl CHO and HyeongJoon AHN 546 A study on applying a Dynamic model to determine the Body roll center of Heavy Trucks Khanh Duong Ngoc, Huong Vo Van and Hung Ta Tuan 552 Structural and Vibration Analysis Considering the Flow Velocity of the Heat Exchanger Yong-Seok Kim, Byung-hyun Ahn, Jung-Min Ha, Seok-Man Son and Byeong-Keun Choi 555 The Forced Response of a Time-Delayed Nonlinear System under Two Families of Additive Resonances J.C. Ji, Terry Brown 560 Experimental Investigation of a Roll-plane Hydraulically Interconnected Suspension and Anti-roll Bars in Warp Mode Nong ZHANG, Sangzhi ZHU and Jack Liang 566 Dynamic Theory and Experiments of a New Near-Resonant Vibrating Screen with Inertial Exciter Wen Bangchun, Liu Shuying, Wang Zongyan, Zhang Xueliang 571 The Receptance Incremental Harmonic Balance Method for Analyzing Rubbing Rotor System YAO Hongliang, LIU Ziliang and WEN Bangchun 576 The Method of High Order Fatigue Test of Thin Plate Composite Structure with Hard Coating Hui Li, He Li, Zhaohui Ren, Bangchun Wen 582 Dynamic Analysis of the Feed Drive System for a Lathe ZHAO Chunyu, CHEN Ye, FAN Chao and WEN Bangchun 588 Analysis on the Material Movement of Solid Wastes Processing Screen Jing JIANG, Yan WU, Shuying LIU and Bangchun WEN 593 x 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Section C. Control and Optimization of Dynamic Systems Design of resonance frequency of smart Helmholtz resonator using neural network Wakae Kozukue, Hideyuki Miyaji 601 Efficiency Examination of Automatic Digging for Excavators on Several Conditions Tatsuya Yoshida, Nobutaka Tsujiuchi, Akihito Ito, Fumiyasu Kuratani, Hiroaki Andou 606 Optimal Design of Dynamic Absorber for Subharmonic Nonlinear Vibration in Automatic Transmission Powertrain Takashi Nakae, Takahiro Ryu, Kenichiro Matsuzaki, Sofian Rosbi, Atsuo Sueoka, Yoshihiro Takikawa, Yoichi Ooi 614 An improved pendulum dynamic vibration absorber with radial vibration mode excited by centrifugal force La Duc Viet, Nguyen Ba Nghi 623 Admittance Control System without Force Sensor for Master-slave Rehabilitation Masashi Yamashita 628 Advanced sliding mode control of floating container cranes Pham Van Trieu, Hoang Manh Cuong, Le Anh Tuan 633 Parameter Optimization of Tuned Mass Damper Systems to Human Body Vibration Control for Standing and Sitting Postures Nguyen Anh Tuan, Nguyen Van Khang and Trieu Quoc Loc 643 Increase of critical flutter wind speed of long-span bridges using passive separate control wings Nguyen Van Khang, Tran Ngoc An 649 Robust design of a composite antenna structure by using multi-objective Taguchi method Soichiro Tanaka, Shinya Honda, Yoshihiro Narita 655 Operating mechanism and optimization of dynamic absorber for a negative damping system Tomoyuki TANIGUCHI and Takahiro KONDOU 662 Trajectory Planning Method for Anti-Sway Control of a Rotary Crane Akira Abe, Keisuke Okabe 668 Vibration Control of Overhead Traveling Crane by Elimination Method of Natural Frequency Components (Complete Prevention of Residual Vibration of Cargo) Toru MIZOTA, Takahiro KONDOU, Kenichiro MATSUZAKI, Nobuyuki SOWA, Hiroki MORI 673 Vibration Mitigation of Thermal Power Plants due to Earthquake by Installing Viscous-Friction Hybrid Dampers Ryo Kato, Satoshi Fujita, Keisuke Minagawa, Go Tanaka 679 Fundamental Study on Health Monitoring System for Pipe using Acceleration of its Surface Kimihiko Inami, Satoshi Fujita, Keisuke Minagawa,Mutsuhito Sudo 686 Suppression of Low Frequency Vibration of a Vibroimpact System by a Dynamic Absorber Hiroki Mori, Takuo Nagamine, Takanori Kobayashi, Yuichi Sato 690 Active wave control of a coupled rectangular cavity Motoya Watanabe, Hiroyuki Iwamoto, Nobuo Tanaka 694 xi 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Semi-active control of RFC (reaction force compensation) mechanism for a linear motor motion stage Duc-Canh NGUYEN, Kang-Jo HWANG, Hyeong-Joon AHN Design method of PID controllers for active mass damper systems incorporating neural oscillators Junichi HONGU, Daisuke IBA, Takayuki SASAKI, Morimasa NAKAMURA, and Ichiro MORIWAKI 702 708 Evaluation of the current Health Monitoring Systems for Cable-stayed Bridge in Vietnam DAO Duy Lam, NGUYEN Viet Trung 714 Adaptive Vibration Control Based on Pole Tuning of Model-based Controller Keiichiro FURUYA, Shinichi ISHIZUKA, Itsuro KAJIWARA 718 Development of Wire Driven Active Vibration Suppression for Gantry Crane with Mechanical Control Yasuo AOKI, Takashi AOKI, and Yasutaka TAGAWA 725 Bilateral Tele-robot of Multiple Cooperative Robots control based on PD method and virtual damping with time delay Thuan Nguyen, Tomoyuki MATSUDA, Hung Chi Nguyen, Nam Duc Do, Akira SONE, Nanako MIURA 730 A Fuzzy Logic System Built based on Fuzzy Data Clustering and Differential Evolution for Fault Diagnosis Sy Dzung Nguyen, Quang Thinh Tran, Kieu Nhi Ngo, Tae Il Seo 738 An Adaptive Dynamic Inversion Controller for Active Railway Suspension Systems Sy Dzung Nguyen, Kieu Nhi Ngo, Nang Toan Truong, Vien Quoc Nguyen, Tae Il Seo 746 Acceleration control of an electric skateboard considering postural sway Motomichi Sonobe, Hirotaka Yamaguchi, and Junichi Hino 754 Vibration analysis and stacking sequence optimization of laminated rectangular plate with blended layers Fumiya NISHIOKA , Shinya HONDA , Yoshihiro NARITA 760 Control of cable vibration using friction damper with consideration of bending stiffness Duy-Thao NGUYEN, Xuan-Toan NGUYEN 767 Controller Design Strategy to Improve Broad Band Tracking Performance for Shaking Tables Mineki Okamoto, Yasutaka Tagawa 774 Control Simulation of an Electrically-Controlled Variable Valve Timing (ECVVT) System with Cycloid Reducer ChungIl Cho, JaeSeong Jeong and HyeongJoon Ahn 780 Motion Investigation of Planar Manipulators with a Flexible Arm Sanh Do, Phong Phan Dang, Khoa Do Dang, Binh Vu Duc 784 Influence of models on computed torque of delta spatial parallel robot Nguyen Quang Hoang, Nguyen Van Khang, Nguyen Dinh Dung 791 Input Shaping and PD Controller for Double-Pendulum Overhead Cranes Nguyen Quang Hoang, Nguyen Van Quyen and Dinh Van Phong 799 Semi-active Suspension Control of a Semi-trailer Truck using Magnetorheological Fluid Damper Sardar Muhammad IMRAN and Zhichao HOU 806 xii 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Section D. Vibration and Noise Global active noise control using a parametric beam focusing source Nobuo Tanaka and Motoki Tanaka 817 Sensing of Nanotoxic Material using Resonance Frequency Kuehwan Jang, Junseok You, Chanho Park, Jinsung Park, Sungsoo Na 823 Standardization of scaled HRIRs based on multiway array analysis Daehyuk Son, Youngjin Park 826 Experimental Study on Vibration and Noise of Wet Friction Clutches Junya Kamei, Toshihiko Shiraishi 831 Prediction of dynamic behavior of workpieces in ultrasonic plastic welding Takao Hirai, Fumiyasu Kuratani, Tatsuya Yoshida, Saiji Washio 837 Broadband Energy Focalization Using a Tailored Power-law-profiled Indentation with Lens-like Function Wei Huang, Hongli Ji, Li Cheng, Jinhao Qiu 844 Experimental study on vibration and noise phenomenon generated from small fan motors Koki Shiohata, Masaki Ogushi 850 Study on Noise Reduction Method of Acoustic Emission Signal for Rotorcraft Gearboxes Condition Monitoring and Diagnosis ByungHyun Ahn, HyoJung Kim, Sun Hwi Park, YongSeok Kim, OeCheul John Kim and Byeong Keun Choi 855 Development of Simulator of Allophone of Motors for Automobiles-Extended Transfer Function Synthesis Method for Analysis Object Including Enclosed Acoustic Field and Motor 860 Koji Kobayashi, Seiji Nishida, Yoshifumi Morita, Makoto Iwasaki, Ryo Kano, Yasuhiko Mukai, Hideki Kabune, Norihisa Ito Active control of sound transmission through a panel with feedforward and feedback control Akira SANADA, Nobuo TANAKA 866 New Evaluation Technique of Seal Strength of Heat Sealing with Ultrasonic Pulse Ren Kadowaki, Takumi Inoue, Tatsuya Oda, Takahiro Nakano 871 Model-based active noise control by a concentrated mass model Shotaro Hisano, Satoshi Ishikawa, Shinya Kijimoto, Yosuke Koba 878 Vibration of glass panel fixed by adhesive tape of mobile phone Yoshihiko KAITO, Shinya HONDA, and Yoshihiro NARITA 886 xiii 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Preface The Asian Pacific Vibration Conference (APVC) is an international conference held once every two years with the intention of encouraging scientific and technical cooperation among Asia Pacific countries. The conference aims to bring researchers, engineers and students from but not limited to areas around the Asia Pacific countries in a collegial and stimulating environment to present the most recent developments and new information on any aspect of mechanical vibration and sound. The 16th APVC (APVC 2015) was held in November 24-26, 2015 at Hanoi University of Science and Technology, Vietnam. The previous fifteen series conferences were held in Japan (1985), Korea (1987), China (1989), Australia (1991), Japan (1993), Malaysia (1995), Korea (1997), Singapore (1999), China (2001), Australia (2013), Malaysia (2005), Japan (2007), New Zealand (2009), Hong Kong (2011), Korea (2013). The program of APVC 2015 covered a broad spectrum of theoretical, computational, and experimental topics in vibration, control, and sound. The invitation to this meeting resulted in a participation by about 200 scientists from 11 different countries. During the conference about 150 lectures are presented. Some of the research areas were Vibration of continuous systems and structure dynamics Vibration of discrete systems and machine dynamics Control and Optimization of dynamic systems Vibration and Noise The organization of this conference would not be possible without the support and contributions from many individuals and organizations. We sincerely appreciate the support from Hanoi University of Science and Technology (HUST) and Vietnamese Association of Mechanics (VAM). We would like to thank the support of Department of Applied Mechanics of HUST and the members of the Local Organizing Committee for their generous assistance during the meeting and the preparation of this proceedings. November 2015 Yoshihiro Narita, Hokkaido, Japan Nguyen Van Khang, Hanoi, Viet Nam xv 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Advanced sliding mode control of floating container cranes Pham Van Trieu*, Hoang Manh Cuong*, and Le Anh Tuan*,# * Institute of Research and Development, Vietnam Maritime University, Hai Phong, Viet Nam # Corresponding Author / E-mail: tuanla.ck@vimaru.edu.vn wave-induced motions of a ship by controlling the boom-luff angle. Rahman et al. [7] reduced payload pendulations due to near-resonance excitations using the reeling and unreeling of handling cable. Masoud et al. [8] suppressed payload vibrations by controlling both slew and luff angles of the boom. Chin et al. [9&10] provided a model of boom crane as an elastic spherical pendulum. A nonlinear model was solved by the method of multiple scales to find the approximated solutions. Wen et al. [11] constructed a dynamic model of a boom crane on a ship with Maryland Rigging, investigated the controllability and observability of linearized model, and designed an optimal controller based on linear quadratic regulator to reduce the payload pendulation. Ellermann et al. [12&13] studied nonlinear dynamics of boom crane vessels. Maczynski and Wojciech [18] proposed an auxiliary mechanical system to stabilize the position of load in ship-mounted boom cranes. Kimiaghalam et al. [19] constructed a feed-forward controller for a shipboard boom crane using gain-scheduling technique. Fang and Wang [20] proposed a nonlinear controller for ship-based boom crane using Lyapunov technique. Spathopoulos et al. [21] designed an active control system for reducing payload pendulation of an offshore crane based on linear quadratic Gaussian and generalized predictive control. Schaub [22] discussed two active ship motion compensation strategies to reduce cargo swing for offshore boom crane. Newly, Cha et al. [23] analyzed the dynamic behavior of a floating heavy crane in which the mathematical model was described by 12 nonlinear equations of motion. Several recent articles have focused on control of container crane mounted on rigid foundation [24-27]. With a simplified model of container crane, a delayed feedback law was investigated in paper [24]. Masoud et al. [25] developed a new model for container crane in which container was considered a rigid body handled on four rigid cables. Then, the time-delay controller was designed for a simplified version of this model to reduce container sway and track the trolley. Linearizing the model of article [25], Nayfeh et al. [26] created a time-delay feedback controller, determined the normal form of the Hopf bifurcation using technique of multi-scales, and investigated the robustness of proposed controller. Abstract This article constructs two robust controllers using sliding mode control (SMC) techniques. The ship-crane system is operated in the complicated condition in which the disturbances due to viscoelasticity of seawater and the flexibility of handling cable are fully taken into account. With two actuators composed of trolley-moving force and container-hoisting torque, the controllers concurrently stabilize six states consisting of trolley displacement, container lifting motion, container swing, axial container oscillation, ship roll and heave. The quality of control algorithms is investigated thru simulation. The results show that the responses of crane are asymptotically stabilized and ship vibrations are significantly reduced. Keywords: cranes; sliding mode control; under-actuated system; system modeling; 1. Introduction Container cranes play an important role in cargo transportation. Recently, the rapid development of world logistics and transportation industry trends to construct a lot of large container ships. Many large harbors in the world are the river-ports with narrow and shallow channels. The big container ships cannot reach into such the harbors. In this case, the cargo transferring process must be done in the area of sea buoy outside the domestic port. A container crane mounted on a ship (as seen in Fig. 1) is applied to lift and transfer containers from the large ship to small ships. Subsequently, small ships will carry containers to the terminal. To increase the productivity, modern container cranes are required in speedy operation. Without good control strategies, the fast crane motion usually leads to the large cargo swings and non-precise movements. Then, crane and ship can be destabilized. Until now, numerous theoretical researches as well as application papers studying on dynamics and control of cranes have been published [1-27]. However, the number of papers concerning on ship-mounted cranes is quite small, compared with that of onshore crane studies. Concentrating on boom crane mounted on vessel, a lot of articles have been reported. Using delay position feedback method, Henry et al. [6] reduced the cargo pendulations caused by 633 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Study on dynamics and control of container crane attached on ship has not attracted numerous researchers. Based on a simplified linear model of offshore crane, Messineo et al. [27] presented an adaptive controller to reduce the hydrodynamic slamming load and track the payload according to a given velocity. Encouraged by recent works [25&26] of Nayfeh’s group, we focus on dynamics and robust controls of ship-mounted container crane which has the improving points as follows: (i) Dissimilar to the articles [25&26] where container crane is mounted on rigid foundation, we claim that the container crane-ship system is suspended on damper-spring foundation characterized for viscoelasticity of seawater. Therefore, the proposed controllers will be designed for the case that disturbance due to elastic-damping property of ocean water is fully included. Furthermore, we consider a ship as a rigid body described by mass and moment of inertia. Therefore, impact of ship motions on container crane is clearly the dynamic excitations. (ii) While preceding articles [1-27] assumed that cable was a hard (inelastic) string, this study considers container-handling cable as the elastic damping rope that is close to realistic crane system in practice. Therefore, the action of disturbance due to elasticity of handling cable is included in robust controllers design, as we will see later. Normally, the cargo transferring process of container crane consists of three separated phases: lifting the payload, moving the trolley, and lowering the payload. To increase the efficiency, these phases can simultaneously be combined. The mathematical model and robust controllers are constructed in the complicated operating case in which hoisting the container and pulling the trolley are simultaneously started. The system behavior is described by six fully nonlinear equations of motion. Correspondingly, six outputs composed of trolley movement, rotation of hoist, container’s oscillation along the cable, container swing, roll and heave motions of ship are considered. The effects of ship roll and heave, the viscous-elasticity of ocean water, the elasticity of hoisting rope are fully taken into account in modeling the ship crane-system and designing the controllers. Since only two inputs composed of trolley pulling force and torque of hoist are used to drive six outputs, the mathematical model is separated into actuated dynamics and un-actuated dynamics. Two robust nonlinear controllers are designed using conventional and back-stepping SMC approaches. The simulation is carried out to investigate the controller quantity. The effects of disturbances due to viscoelasticity of seawater and flexibility of wire rope are fully considered in two simulation cases. Fig. 1. A container crane mounted on a ship Fig. 2: Physical modeling of a floating container crane 2. System dynamics A container crane attached on a ship (Fig. 1) is modeled as a multi-body system shown in Fig. 2. Ship is considered as a rigid body having its center mass mb and its moment of inertia Jb. Ship is suspended on stiffness and damping components k1, k2, b1, b2 characterized for elasticity and viscous damping of seawater. Container handled on flexible cable is viewed as a point mass mc. The flexibility of cable is characterized by spring k3 and damper b3. Trolley is pushed by force ut to move along the primary beam of crane. Hoisting mechanism is fixed on trolley base and the container is lifted or lowered by rotating a drum having radius rm and moment of inertia Jm. The dynamical behavior of system is analyzed in the complicated operating case in which hoisting the container and moving the trolley are simultaneously implemented. The dynamic system set in reference Cartesian frame Oxy composes of 634 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 two rigid bodies, namely ship’s body (mb, Jb) and hoisting drum Jm, and two particles, namely trolley mass mt and container mass mc. The mechanical system has six degrees of freedom associated with six generalized coordinates: trolley motion along the primary beam of crane m35 mc (l0 s q4 rm q3 rm q2 )sin q3 , m36 mc a2 (l0 s q4 rmq3 rm q2 )cos(q6 q3 ) mc (l0 s q4 rm q3 rm q2 )(q1 a1 )sin(q6 q3 ) q1 xt , rotation of hoisting drum q2 m , container swing m41 mc sin(q6 q3 ) , m42 mc rm , m44 mc , q3 , m45 mc cos q3 , m51 (mc mt )sin q6 , container oscillation along the cable q4 s, vertical oscillation of ship q5 y, and ship swing m46 mc (q1 a1 ) cos(q6 q3 ) mc a2 sin(q6 q3 ) q6 b . Two actuators compose of trolley pulling force m52 mc rm cos q3 equations, we constituted the fully nonlinear equation of motion in paper [28] as follows where, M q mij C q, q cij G q g j U u1 ut T is m53 mc (l0 s q4 rm q2 rm q3 ) sin q3 , m56 (mt mc )a1 (mt mc )q1 cos q6 (1) symmetric mass matrix, damping matrix, (mt mc )a2 sin q6 , m61 (mc mt )a2 , denotes centrifugal m62 J m mc rm (q1 a1 ) cos(q6 q3 ) ( i, j 1 6 ) indicates a gravitational vector, u2 M m , m54 mc cos q3 , m55 mt mb mc , ut and torque M m of lifting drum. Based on Lagrange’s C q, q q G q U M q q , mc a2 rm sin(q6 q3 ) m63 mc a2 (l0 s q4 rm q2 rm q3 ) cos(q6 q3 ) 0 0 0 0 is a vector of inputs, T l0 s q4 mc (q1 a1 ) sin(q6 q3 ) rm q3 rm q2 and q xt m s y b q1 q2 q3 q4 q5 q6 is T T a vector of generalized coordinates. m65 (mt mc )(a1 q1 ) cos q6 (mt mC )a2 sin q6 , m11 mc mt , m12 mc rm sin(q6 q3 ) , m66 J b J m (mt mc )(q12 a12 a2 2 2a1q1 ) , m13 mc (l0 s q4 rm q2 rm q3 ) cos(q6 q3 ) , m23 m32 m34 m43 0. m14 mc sin(q6 q3 ) , m15 (mt mc )sin q6 , The elements of damping matrix is of the form m16 (mt mc )a2 , m21 mc rm sin(q6 q3 ) , c11 bt , c12 2mc rm q3 cos(q6 q3 ) , m22 J m mc rm2 , m24 mc rm , m25 mc rm cos q3 , c13 mc (rm q3 2q4 ) cos(q6 q3 ) mc rm (q1 a1 ) cos(q6 q3 ) , m64 mc (q1 a1 ) cos(q6 q3 ) mc a2 sin(q6 q3 ) , The components of mass matrix has the following form m26 J m mc rm a2 sin(q6 q3 ) , mc (l0 s q4 rm q3 rm q2 )q3 sin(q6 q3 ) , , c16 (mt mc )(a1 q1 )q6 , c21 2mc rq6 cos(q6 q3 ) , m31 mc (l0 s q4 rm q3 rm q2 ) cos(q6 q3 ) , c22 bm , c23 mc rm (l0 s rm q4 rm q2 )q3 , m33 mc (l0 s ) 2 mc q4 2 mc rm2 (q3 q2 ) 2 c26 mc rm (q1 a1 )q6 sin(q6 q3 ) mc rm a2 q6 cos(q6 q3 ) 2mc (l0 s )q4 2mc rm (q2 q3 )(l0 s ) , 2mc rm q2 q4 q3 q4 , 635 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 3. Controllers design c31 2mc (l0 s q4 rm q3 rm q2 )q6 sin(q6 q3 ) , In this section, two robust controllers are constructed using conventional and advanced sliding mode techniques. The controllers are applied for stabilizing offshore container crane in its complicated operation in which lifting the container and moving the trolley are simultaneously combined. More precisely, the controllers simultaneously conduct seven duties: tracking the trolley to destination, hoisting the container to desired cable length, suppressing the axial oscillation of container caused by cable elasticity, maintaining the container swing small during transient-state and completely eliminating this swing at steady-state, reducing the heave and roll motions of ship as small as possible. 3.1 Decoupling A container crane mounted on a ship has six degrees of freedom associated with six output components, c32 2m c rm (l0 s q4 rm q3 rm q2 )q3 , c33 mc (l0 s q4 rm q2 rm q3 )(2q4 rq3 ) , l0 s q4 c36 mc (q1 a1 ) cos(q6 q3 )q6 , rm q3 rm q2 mc a2 (l0 s q4 rm q2 rm q3 ) sin(q6 q3 )q6 c41 2mc q6 cos(q6 q3 ) , c44 b3 , c43 mc (l0 s q4 rm q2 rm q3 )q3 , c46 mc (q1 +a1 ) sin(q6 q3 )q6 mc a2 cos(q6 q3 )q6 , c51 2(mt mc ) cos q6 q6 , c55 b1 b2 , q q1 c53 mc (l0 s q4 rm q2 rm q3 ) cos q3 q3 , mc (rm q3 2rq2 2q4 ) sin q3 U u1 u2 q a q1 c61 2(mt mc )(q1 a1 )q6 , q6 . As an under-actuated T q5 0 0 0 0 in which only actuated states T q2 T are directly tracked by control forces T qu q3 q4 q5 The q6 T un-actuated states are not connected directly to actuators. Corresponding to actuated and un-actuated states, the mathematical model (1) can be decomposed into two sub-systems as c65 b2 a4 b1a3 , c66 b2 a4 2 b1a3 2 , c14 c15 c24 c25 c34 c35 c42 c45 c52 c54 c62 c64 0. and the coefficients of gravity vector is determined by a M12 (q )q u C11 (q, q )q a M11 (q )q C12 (q, q )q u G1 (q) U1 (q, q ) (2) a M 22 (q)q u C21 (q, q )q a M 21 (q)q C22 (q, q )q u G 2 (q) 041 (3) where, g1 (mt mc ) g sin q6 , g 2 mc grm cos q3 , m m12 m13 m14 m15 m16 M11 q 11 , M12 q 0 m m m m m 21 22 24 25 26 g3 mc g (l0 s q4 rm q2 rm q3 )sin q3 , m31 0 m33 0 m m 0 m 42 44 , M22 q M21 q 41 m51 m52 m53 m54 m61 m62 m63 m64 g 4 k3 (q4 s ) mc g cos q3 , , c C11 q, q 11 c21 g 6 (k1a3 k2 a4 )(q5 y ) (k1a32 k 2 a4 2 )q6 (mt mc ) g (a1 q1 ) cos q6 q4 U1 u1 u2 . (q1 a1 )(2q4 2rm q2 rm q3 ) c63 mc sin(q6 q3 ) a ( l s q r q r q ) q 4 m 3 m 2 3 2 0 , a2 (2q4 2rm q2 rm q3 ) mc (q1 a1 )(l0 s q4 cos(q6 q3 ) r q r q )q m 3 m 2 3 (k1 k2 )(q5 y ) q3 system, six output variables are driven by two input signals, c56 b2 a4 b1a3 (mt mc )a2 cos q6 q6 , (mt mc )(a1 q1 ) sin q6 q6 g5 (mb mt mc ) g (k1a3 k2 a4 )q6 q2 . (mC mt ) ga2 sin q6 636 c12 c , C12 q, q 13 c22 c23 m35 m36 m45 m46 m55 m56 m65 m66 0 0 c16 0 0 c26 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 c31 c32 c33 0 0 c c 0 c 0 , C22 q, q 43 44 C21 q, q 41 c51 0 c53 0 c55 c61 0 c63 0 c65 G1 q g1 g 2 , G 2 q g3 T g4 c36 c46 c56 c66 s e a e a eu 1 0 The matrices and vectors of equation (13) is now reduced as reference positions q ad q1d states qu q3 q4 qud q3d 0 q4 q5 q5 where, q6 reaching to desired values Since (9) (10) K is a diagonal positive gain matrix, control input (10) makes the system trajectories remain on the surface (7). 3.3. Stability analysis of sliding surface Let us investigate the stability of sliding regime by considering a positive definite function 1 V sT s (11) 2 The derivative of V with respect to time is defined as M 22 (q ) is positive definite for every q R , un-actuated dynamics (3) can be rewritten as (4) Substituting equation (4) into equation (2), one obtains the reduced form of system dynamics V sT s a C1 (q, q )q a C2 (q, q )q u G(q) U1 (q, q ) (5) M(q)q (12) Substituting (8) into (4) yields where, 2 q a q u T q a q ad a q q u K sgn s 1 22 M (q ) M11 (q) M12 (q)M (q )M 21 (q) C1 (q, q ) C11 (q, q ) M12 (q)M 221 (q )C21 (q, q ) (13) Inserting (13) into (8) and (10) into (12), one obtains the negative semi-definite function C2 (q, q ) C12 (q, q ) M12 (q)M 221 (q)C22 (q, q ) G (q) G1 (q) M12 (q)M 221 (q)G 2 (q) V sT s sT K sgn s Considering q a as system outputs, actuated dynamics a M 1 (q) U1 (q, q ) C1 (q, q )q a C2 (q, q )q u G (q ) q (14) 1 s12 2 s22 K1 s1 K 2 s2 0 (5) is modified as (8) function of the sliding surface. The component sgn s of 6 a C21 (q, q )q a M (q )q u M 221 (q ) 21 q C22 (q, q )q u G 2 (q) are 0 K diag K1 , K 2 , K1 , K 2 0 , sgn s denotes the sign T asymptotically. 2 C1 q, q q a C2 q, q q u G q approaching to T q6 d 0 3 4 2 q a q u T q a q ad U1 q, q M q q u K sgn s q2 d , and un-actuated T 0 leads to the conventional SMC law 3.2 Conventional sliding mode control Mathematically, the control schemes are designed to q2 0 0 s s K sgn s 0 T drive the actuated states q a q1 1 Inserting (6) into (7) and (8) into the exponential approaching dynamics G 2 q , U(q, q ) U1 (q, q ) 041 T and a q a q u s q M q M12 q C11 q, q C12 q, q M q 11 , C q, q M21 q M22 q C21 q,q C22 q, q G q G1 q 2 matrices of positive parameters. Derivative of s with respect to time is determined by T T 0 where, s R 2 , g6 . g5 (7) which implies that V t V 0 for every (6) and with M (q) being a positive definite matrix. K1 , K 2 0, 0 . 1 , 2 0, 0 This means that s is limited in a boundary. Barbalat’s lemma indicates that lim V 0 leads t Defining the switching manifold as linear combination of tracking errors e a q a q ad and eu q u q ud , we to lim s 0 . Hence, the sliding surface is asymptotically have stabilized. 3.4 Back-stepping sliding mode control t 637 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 prove that s 0 as t . Referring from sliding surface defined by (7), the asymptotical stability of sliding Let us design a controller based on the combination of back-stepping and SMC approaches. Consider a Lyapunov lower-bounded function 1 V1 eTa e a (15) 2 whose derivative with respect to time is described by V1 e Ta ea surface s and that of actuated tracking error e a lead to zero-convergence of un-actuated tracking error eu. 4. Numerical simulation and results (16) The system behavior is investigated thru simulation. The mathematical model (2)&(3) is numerically analyzed based on MATLAB environment for three following cases: (i) Uncontrolled case. The crane lifts the container, and at the same time, moves the trolley to desired position. The inputs composed of trolley driving force and torque of hoist are determined in terms of motor performance curves. For example, the inputs of three-phase induction AC motors can be analytically represented as Referring to fictitious input e a from sliding surface equation (7), or letting fictitious input e a s e a eu to asymptotically stabilize actuated tracking error e a , then inserting it into (15), one derives V1 sT e a eTa e a eTa eu (17) t U s U max U s 1 ut (t ) t ts 0 If s 0 then V1 0 or V1 t V1 0 for every positive definite matrix and positive control gains . t M s M max M s 1 M m t t ts M s Therefore, e a is bounded. Applying Barbalat’s lemma, we ea 0 can conclude that as t . Next step, considering 1 V2 V1 sT s 2 as a composite Lyapunov candidate, we obtain V2 V1 sT s = sT e a eTa ea eTa eu sT s (23) if t tts if t tts (24) if t tts where, U s k f mc mt g and M s mc rm g are static (18) force and torque at steady-state, U max , M max are maximum starting force and torque at transient-state (19) determined from motor’s catalogs, tts is time duration of Inserting (6) into (8) and (10) into (19) yields V2 = sT e a eTa e a eTa eu U1 q, q C1 q, q q a M 1 q s C2 q, q q u G q q a q u if t tts transient-state, k f is coefficient of kinetic friction. as back-stepping SMC input, we obtain the derivative of (ii) Conventional SMC and back-stepping SMC. The dynamics (2)&(3) of crane-ship system is respectively driven by conventional SMC input (10) and back-stepping SMC input (21). The system parameters and gains of controllers used for simulation are depicted in Table 1. Controller parameters are chosen based on trial and error method. The controllers (10) and (21) will move the trolley suspending container to 3 m – desired position, concurrently lift the container from initial cable length l0 = V2 which is described by 15 m to ld l0 rm md s 12 m – desired cable length in T (20) Choosing U1 q, q C1 q, q M q q a C2 q, q M q q u (21) M q q a q ad G q M q sgn s V2 V1 sT s = V1 sT sgn s = V s s 0 1 1 1 2 terms of the number of desired revolution of hoisting drum (22) being md 2 Clearly, V2 0 for every positive definite matrix, diag 1 , 2 . Applying Barbalat’s lemma, we easily 638 l0 ld 180 rm 528.880 1.469 revolutions. 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 back-stepping SMC based responses is faster and smoother than that of conventional SMC base responses. Although controllers (26) and (37) can not completely stabilize the ship responses, they partly reduce heave and roll motions of ship as shown in Figs 8b&9b. We can see obviously in Figs 8b&9b that back-stepping SMC based ship responses are better than conventional SMC based ship responses. Notably, the main duty of proposed controllers is to stabilize responses of the container crane. The solution for ship stabilization is not included in proposed controllers (26)&(37). Normally, stabilizing the ship rely on naval architectural engineering which has not been mentioned here. Table 1. System parameters and gains of controllers Conventional Back-stepping System parameters SMC SMC 1 0.2, 1 0.2, 2 0.4, 2 0.3, 1 13, 1 13, 2 1, 2 0.1, 3 4, 3 3, 4 0.1, 4 0.1, K1 K 2 2, 1 2 5, 40 30 Displacement (m) a2 = 32 m, a3 = 12.5 m, a4 = 12.5 m, rm = 0.325 m, l0 =15 m, mb = 4500000 kg, mt =5900 kg, mc = 650 kg, Jb = 571875000 kgm2, Jm = 41700 kgm2, k1 = 1250000 N/m, k2 = 1250000 N/m, k3 = 12000 N/m, b1 = 200 Ns/m, b2=200 Ns/m, b3 = 220 Ns/m, bt = 50 Ns/m, g = 9.81m/s2, bm = 70 Ns/m. 20 10 0 The duties of controllers (10) and (21) are strictly complicated since only two control inputs are applied to drive six system outputs. The initial conditions correspond to static balance of crane-ship system given by (25) q1 0 q2 0 q3 0 q 4 0 q5 0 q6 0 0 (26) ( max 46 , smax 3.8 cm ) 1.5 2 2.5 Time (s) 3 3.5 4 Conventional SMC Backstepping SMC 3 2 1 0 0 10 20 30 40 50 Time (s) Fig. 3b. Trolley motion (xt): Conventional and back-stepping controls 0.2 The number of revolutions amplitudes 1 4 (iii) Simulation results and analysis. The simulation results are described in Figs. 3-9. Without control, trolley motion is destabilized (Fig. 3a). Conversely, the proposed controllers precisely track the trolley moving to 3m-desired position (Fig. 3b). In the case that control strategy is not equipped, the axial oscillation of container (Fig. 7a) and container swing (Fig. 6a) trend to divergence with the large 0 0.5 Fig. 3a. Trolley motion (xt): Uncontrolled case Displacement (m) q1 0 q2 0 q3 0 q4 0 q5 0 q6 0 0 0 Furthermore, container cannot be lifted to reference (Figs. 4a&5a). The instability of container crane partly leads the ship to instable motions (Figs. 8a&9a). The conventional SMC and back-stepping SMC make the responses of container crane asymptotically approach to references: container is lifted to 12 m – desired cable length (Fig. 5b) within 18 sec, 0.15 0.1 0.05 0 -0.05 0 10 20 30 40 50 Time (s) container swing is kept small ( max 1.40 ) during the Fig. 4a. Rotation of hoisting drum (m): Uncontrolled case transportation period and absolutely suppressed at its destination (Fig. 6b). The axial container oscillation due to elasticity of cable (Fig. 7a) is completely eliminated by proposed controllers within 9 sec as seen in Fig 7b. It can be seen in Figs. 4a&5a that the convergence of 639 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 1.5 Conventional SMC Backstepping SMC 1.5 1 0.5 0 Conventional SMC Backstepping SMC 1 Angle (degree) The number of revolutions 2 0.5 0 -0.5 0 10 20 30 40 -1 50 0 10 20 Time (s) 30 40 50 Time (s) Fig. 4b. Rotation of hoisting drum (m): Conventional and back-stepping controls Fig. 6b. Container swing (): Conventional and back-stepping controls 0.06 15.2 15 14.8 14.6 14.4 0.04 Displacement (m) Cable length (m) 15.4 0.02 0 -0.02 0 10 20 30 40 50 -0.04 Time (s) 0 10 20 Fig. 5a. Container-lifting motion: Uncontrolled case 50 Conventional SMC Backstepping SMC 14 0.03 13 Displacement (m) Cable length (m) 40 Fig. 7a. Axial container oscillation (s): Uncontrolled case 15 12 11 30 Time (s) 0 10 20 30 40 50 Conventional SMC Backstepping SMC 0.02 0.01 0 -0.01 Time (s) Fig. 5b. Container-lifting motion: Conventional and back-stepping controls -0.02 0 5 10 Time (s) 15 20 Fig. 7b. Axial container oscillation (s): Conventional and back-stepping controls 60 5 20 4 0 Displacement (m) Angle (degree) 40 -20 -40 -60 0 10 20 30 40 50 3 2 1 0 Time (s) Fig. 6a. Container swing (): Uncontrolled case -1 0 10 20 30 40 Time (s) 50 60 Fig. 8a. Ship heave (y): Uncontrolled case 640 70 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 6. References 0.08 Conventional SMC Backstepping SMC Displacement (m) 0.06 (1) 0.04 0.02 (2) 0 -0.02 -0.04 0 10 20 30 40 Time (s) 50 60 70 Fig. 8b. Ship heave (y): Conventional and back-stepping controls (3) 5 Angle (degree) 0 (4) -5 -10 -15 -20 -25 (5) 0 10 20 30 40 Time (s) 50 60 70 Fig. 9a. Ship roll (b): Uncontrolled case Angle (degree) 0.02 Conventional SMC Backstepping SMC 0 (6) -0.02 (7) -0.04 -0.06 0 10 20 30 40 (8) 50 Time (s) Fig. 9b. Ship roll (b): Conventional and back-stepping controls (9) 5. Conclusion (10) Based on conventional SMC and back-stepping integrated SMC techniques, two robust nonlinear controllers was proposed to control the outputs: tracking the trolley to desired position, hoisting the payload to reference cable length, suppressing the container swing, eliminating the axial oscillation of container along the cable, and reducing the vertical oscillation and the roll angle of ship. The controllers were designed for the complicated operation of container crane-ship system in which the effects of viscoelasticity of seawater and elasticity of hoisting cable was fully considered. The simulation results show that the container crane’s responses are asymptotically stabilized and ship’s vibrations were considerably reduced. (11) (12) (13) (18) 641 Fang Y, Ma B, Wang P and Zhang X. A Motion Planning-Based Adaptive Control Method for an Underactuated Crane System. IEEE Transactions on Control System Technology 2012; 20: 241-248. Sun N and Fang Y. New Energy Analytical Results for the Regulation of Underactuated Overhead Cranes: An End-Effector Motion Based Approach. IEEE Transactions on Industrial Electronics 2012; 59: 4723-4734. Sun N, Fang Y, Zhang X and Yuan Y. Transportation Task-Oriented Trajectory Planning for Underactuated Overhead Cranes Using Geometric Analysis. IET Control Theory & Applications 2012; 6: 1410-1423. Sun N and Fang Y. An efficient online trajectory generating method for underactuated crane systems. International Journal of Robust and Nonlinear Control. Article first published online: 17 January 2013. DOI: 10.1002/rnc.2953. Le Anh Tuan, Soon-Geul Lee, Deok Hyeon Ko, and Luong Cong Nho, "Combined Control with Sliding Mode and Partial Feedback Linearization for 3D Overhead Cranes," International Journal of Robust and Nonlinear Control, vol. 24, no. 18, pp. 3372-3386, December 2014. Henry RJ, Masoud ZN, Nayfeh AH and Mook DT. Cargo pendulation reduction on ship-mounted cranes via boom-luff angle actuation. Journal of Vibration and Control 2001; 7: 1253-1264. Rahman EMA and Nayfeh AH. Pendulation reduction in boom cranes using cable length manipulation. Nonlinear Dynamics 2002; 27: 255-269. Masoud ZN, Nayfeh AH and Mook DT. Cargo pendulation reduction of ship-mounted cranes. Nonlinear Dynamics 2004; 35: 299-311. Chin CM, Nayfeh AH and Mook DT. Dynamics and control of ship-mounted cranes. Journal of Vibration and Control 2001; 7: 891-904. Chin CM, Nayfeh AH and Rahman EA. Nonlinear dynamics of a boom crane. Journal of Vibration and Control 2001; 7: 199-220. Wen B, Homaifar A, Bikdash M and Kimiaghalam B. Modeling and optimal control design of shipboard crane. In: American Control Conference, San Diego, California, June, 1999. Ellermann K and Kreuzer E. Nonlinear dynamics in the motion of floating cranes. Multibody System Dynamics 2003; 9: 377-387. Ellermann K, Kreuzer E and Markiewicz M. Nonlinear dynamics of floating cranes. Nonlinear Dynamics 2002; 27: 107-183. Maczynski A and Wojciech S. Stabilization of load’s position in offshore cranes. Journal of Offshore 16th Asia Pacific Vibration Conference 24-26 November, 2015 HUST, Hanoi, Vietnam APVC2015 Mechanics and Arctic Engineering 2012; 134: 1-9. (19) Kimiaghalam B, Homaifar A, Bikdash M and Hunt BR. Feedforward control law for a shipboard crane with Maryland rigging system. Journal of Vibration and Control 2002; 8: 159-188. (20) Fang Y and Wang P. Advanced nonlinear control of an offshore boom crane. In: American Control Conference, Fairmont Queen Elizabeth, Montreal, Canada, June, 2012. (21) Spathopoulos MP and Fragopoulos D. Pendulation control of an offshore crane. International Journal of Control 2004; 77: 654-670. (22) Schaub H. Rate-based ship-mounted crane payload pendulation control system. Control Engineering Practice 2007; 16: 132-145. (23) Cha JH, Roh MI and Lee KY. Dynamic response simulation of a heavy cargo suspended by a floating crane based on multibody system dynamics. Ocean Engineering 2010; 37: 1273-1291. (24) Erneux T and Nagy TK. Nonlinear stability of a delayed feedback controlled container crane. Journal of Vibration and Control 2007; 13: 603-616. (25) Masoud ZN and Nayfeh AH. Sway reduction on container cranes using delayed feedback controller. Nonlinear Dynamics 2003; 34: 347-358. (26) Nayfeh NA and Baumann WT, Nonlinear analysis of time-delay position feedback control of container cranes, Nonlinear Dynamics, Volume 53 (1), 2008, pp. 75-88 (27) Messineo S and Serrani A, Offshore crane control based on adaptive external models, Automatica, Volume 45(11), 2009, pp. 2546-2556. (28) Le Anh Tuan, Hoang Manh Cuong, Soon-Geul Lee, Luong Cong Nho, and Kee Moon, “Nonlinear feedback control of container crane mounted on elastic foundation with flexibility of suspended cable,” Journal of Vibration and Control. Published online before print on November 24, 2014, DOI: 10.1177/1077546314558499. Acknowledgements This research is funded by Vietnam National Foundation for Science and Technology Development (NAFOSTED) under grant number 107.01-2013.04. 642 AUTHOR INDEX Last, Firstname Page A Abdulkareem, Muyideen 170 Abe, Akira 668 Ahn, Byung-Hyun 555, 855 Ahn, Hyeong-Joon 516, 546, 702, 780 Dinh, Gia Ninh 268 Dinh, Tan Hung 183 Hongu, Junichi 708 Dinh, Van Phong 532, 799 Horii, Hirosuke 93 Do, Dang Khoa 532, 784 Horiuchi, Makoto 395 730 Hosokawa, Kenji 77 Do, Nam Duc Do, Sanh 532, 784 844 Duong, Ngoc Khanh 552 Huang, Xianzhen 538 Huang, Zhicheng 191 Andou, Hiroaki 606 F Aoki, Takashi 725 Fan, Chao 588 Aoki, Yasuo 725 Fang, Yuhong 368 149 Aono, Akihiro 37 Fujimoto, Shigeru Aoshima, Keita 342 Fujita, Katsuhide Asami, Toshihiko 324 Fujita, Satoshi 103, 108, 232, 500, Asaoka, Sho 149 679, 686 Aziz, Z.A. 286 571 Brown, Terry 560 Bui, Huy Kien 268 Byon, Jun Ho 99 Caracoglia, Luca 300, 391 154, 162 Ikeda, Toshiyuki 406 Inami, Kimihiko 686 Furuya, Nobuyuki Furuya, Osamu 93 149, 177, 494 G Goda, Kengo 494 Ha, Jung-Min 555 588 Hase, Yuki 500 Cheng, Li 42, 844 Hasebe, Yusuke 361 Cho, Chung Il 546, 780 Hayashi, Toshiya 69 Choi, Byeong-Keun 386, 491, Hee, L. M. 555, 855 Hemmati, Hossein 714 708 806 93, 222 Chen, Ye Dao, Duy Lam Iba, Daisuke Imran, Sardar Muhammad Furuya, Kohei 448 336 I 324 Han, Qinkai Dang, Bao Lam 516, 702 Imanishi, Kazuya 456 D Hwang, Kang-Jo 718 Chen, Lumiao 191, 448, 456 435 Furuya, Keiichiro Han, Jae-Hung Chu, Fulei Hwang, Jae Deok Imamura, Kyosuke 440 435 521, 525 113 Chen, An-jun Choi, Hun Oh Hui, K. H. Fukui, Kotaro H C 806 Huang, Wei 295 Bangchun, Wen Hou, Zhichao 374 Akao, Satoru 170 760, 886 Duong, Ngoc Hao 99 Bakhary, Norhisham 69, 87, 212, 655, 268 Ahn, Jin Ho B Honda, Shinya Dao, Huy Bich 461, 512 525 63 Hino, Junichi 754 Hirai, Takao 837 Hisano, Shotaro 878 Hoang, Manh Cuong 633 Hoang, Phuong Hoa 244 32 Inoue, Takumi 131, 871 Ise, Tomohiko 324 Ishihana, Kenta 494 Ishihara, Yukiko 232 Ishikawa, Satoshi 142, 506, 878 Ishizuka, Shinichi 718 Isoda, Ryosuke 307 Itadani, Kota 312 Ito, Akihito 54, 468, 606 Ito, Norihisa 860 Ito, Tomohiro 329 Itoga, Takaaki 324 Iwamoto, Hiroyuki 126, 694 Iwasaki, Makoto 860 Izyan, M.D. Nurul 286 J Jang, Kuehwan 823 Jang, Yong-Ho 491 Jeong, Jae Seong 516, 780 Kosaka, Fumihiko 395 Mori, Yoshifumi Jeong, ManYong 342, 352 Kozukue, Wakae 601 Morishita, Shin Jeong, Sin Woo Ji, Hongli 228 42, 844 Kumagai, Takahito Kunimatsu, Yuki 391 295, 361 Morita, Yoshifumi 860 318 Moriwaki, Ichiro 708 606, 837 Mukai, Yasuhiko 860 87 Ji, J.C. 560 Kuratani, Fumiyasu Jiang, Huan-xin 440 Kuroda, Katsuhiko 237 Muramatsu, Ken 149 Jiang, Jing 593 Kwon, Chang-Beom 512 Muta, Hitoshi 149 N L K La, Duc Viet 623 Na, Sungsoo 823 131, 871 Le, Anh Tuan 633 Nagamine, Takuo 690 Kaito, Yoshihiko 886 Le, Thai-Hoa 154, 162 Nagatani, Asahiro 54 Kajiwara, Itsuro 718 Lee, Dong-Kyu 512 Nahvi, Hassan 63 Kamei, Junya 831 Lee, J.H. 286 Nakae, Takashi Kaneko, Mitsugu 300 Lee, Jong Myeong 491 Nakagawa, Chihiro 329 Kaneko, Shigehiko 427 Lee, Jong-Myeong 386 Nakamura, Morimasa 708 Kano, Ryo 860 Lee, Joong Hyeok 99 Nakamura, Takenori 391 Kato, Masaki 113 Lee, Sang Jeong 59 Nakamura, Tomomichi Kato, Ryo 679 Leong, M. Salman Kabune, Hideki 860 Kadowaki, Ren Kawamura, Shozo 32, 37, 54, 307, 312, 395 521, 525 475, 614 6 Nakano, Takahiro 871 Li, He 582 Nakano, Yutaka 380 Li, Hui 582 Nanba, Akihiro 475 Kawashima, Takeshi 419 Liang, Jack 566 Narita, Yoshihiro 69, 87, 212, 655, Kijimoto, Shinya 878 Lim, M. H. 521 760, 886 Kim, Byeonghee 99 Liu, Panxue 538 Nariya, Koji 108 Kim, Chae Sil 435 Liu, Shuying 593 Nerse, Can 218 Kim, Dong Il 435 Liu, Ziliang 576 Ngo, Kieu Nhi Lu, Li-xin 440 Ngui, W. K. 521, 525 Nguyen, Anh Tuan 461, 643 Kim, Hack-Eun 386, 491 Kim, Hyo Jung 491, 855 Kim, Kihyun 1 Kim, Kwang-Joon 81 Kim, OeCheul John 855 Kim, Seockhyun 99 Kim, Yong-Seok 555, 855 Kishida, Takuya 131 Koba, Yosuke 878 Kobayashi, Koji 860 Kobayashi, Takanori 690 Koike, Yoshio 136 Koketsu, Yu 406 Kondou, Takahiro 142, 506, 662, 673 M Matsubara, Masami 32, 37, 54, 307, 312, 395 Matsuda, Tomoyuki 204, 730 Matsumura, Yuichi 93, 222 Matsuoka, Taichi Matsuzaki, Kenichiro 400 142, 475, 506, 614, 673 Minagawa, Keisuke 103, 232, 500, 679, 686 Miura, Nanako 204, 730 Miyaji, Hideyuki 601 Mizota, Toru 673 Mori, Hiroki 673, 690 13, 21, 738, 746 Nguyen, Ba Nghi 623 Nguyen, Ba Tuyen 222 Nguyen, Canh 516 Nguyen, Cao Thang 374 Nguyen, Da Thao 13 Nguyen, Dinh Duc 251 Nguyen, Dinh Dung 791 Nguyen, Dong Anh 374, 413 Nguyen, Duc Thi Thu Dinh 278 Nguyen, Duc-Canh 702 Nguyen, Duy-Thao 767 Nguyen, Hung Chi 730 Nguyen, Huu Hung 119, 278 Nguyen, Ngoc Linh 413 Park, Youngjin 826 Son, Seok-Man Sone, Akira Nguyen, Quang Hoang 791, 799 Pham, Anh Duc 546 Nguyen, Quang Thanh 13, 21 Pham, Bao Toan 13, 21 555 204, 730 Sonobe, Motomichi 754 Nguyen, Sy Dzung 738, 746 Pham, Dinh Trung 244 Sowa, Nobuyuki 673 Nguyen, Toan Xuan 196, 260 Pham, Minh Hai 336 Sudo, Mutsuhito 686 244 Pham, Thai Quoc 329 Sueoka, Atsuo Nguyen, Van Khang 643, 649, 791 Pham, Van Trieu 633 Sumitani, Takuya Nguyen, Van Quyen 799 Phan, Dang Phong 784 Suzuki, Yuto Nguyen, Van Sy 183 Nguyen, Vien Quoc 746 Nguyen, Viet Trung 278, 714 Nguyen, Trong Phuoc Nguyen, Xuan Ha Nguyen, Xuan Thuan 336 Qiu, Hengbin Qiu, Jinhao 191, 456 483 42, 844 204, 730 Nguyen, Xuan-Toan 767 Niikawa, Takeshi 113 Niiyama, Nobuhiro 177 Nishida, Seiji 860 Nishioka, Fumiya 760 Niwa, Tomonori 400 R Ren, Zhaohui 582 Roh, Woo-Jin 59 Rosbi, Sofian 475, 614 Roser, Holger 368 Ryu, Homin Ryu, Takahiro 1 475, 614 O Oda, Tatsuya Ogata, Keiji Ogushi, Masaki Oh, Yutaek Ohama, Kazumasa Ohashi, Tatsuro Ohmata, Kenichiro Ohmura, Kazuhisa Okabe, Keisuke Okamoto, Mineki Omata, Shohei Ooi, Yoichi 871 177 850 50 131 77 400 131 668 774 494 475, 614 P Park, Chanho 823 Park, Gyu-Jin 386 Park, Jinsung 823 Park, Jong-beom 59 Park, No-Cheol 59 Park, Sun Hwi 491 Park, SunHwi 855 S Saito, Takashi 295 Sanada, Akira 866 Sasajima, Manabu 136 Sasaki, Takayuki 708 Sasuga, Masashi 93 Sato, Hiroki 468 Sato, Yuichi 690 Seo, Tae Il 352 Ta, Tuan Hung 552 Tagawa, Yasutaka 725, 774 Takahara, Hiroki 380 Takahashi, Osamu 108 Takai, Akihiro 427 Takayanagi, Tenma 400 Takehara, Shoichiro 318, 406 Takikawa, Yoshihiro 475, 614 Tampo, Tatsuya 212 Tanaka, Go 679 Tanaka, Motoki 817 Tanaka, Nobuo 126, 694, 817, 866 300, 391 Sakurai, Tomoki Seo, Soon-woo 6 T Q Qin, Zhaoye 475, 614 81 738, 746 Shida, Zenichiro 406 Shimura, Yuta 103 Shin, Min Jae 435 Shintani, Atsuhiko 329 Shiohata, Koki 850 Shiozaki, Hirotaka 222 Shiraishi, Toshihiko 361, 831 Shirasuna, Noriyuki 380 Shuying, Liu 571 Son, Daehyuk 826 Tanaka, Soichiro 655 Tanaka, Yudai 108 Tang, Liling 42 Taniguchi, Tomoyuki 662 Terumichi, Yoshiaki 318, 406 Tran, Duc 532 Tran, Duc Van 196, 260 Tran, Ngoc An 649 Tran, Quang Thinh 738 Tran, Quoc Quan 251 Tran, The Linh 546 Trieu, Quoc Loc 643 Truong, Nang Toan 746 Tsujiuchi, Nobutaka 54, 468, 606 V Vafaei, Mohammadreza 170 Viswanathan, K.K. 286 Vo, Van Huong 552 Vu, Dinh Quy 28, 183 Vu, Duc Binh 784 W Walker, Paul 368 Wang, Hao 538 Wang, Jun 440 Wang, Qi-li 440 Wang, Semyung 1, 218 Washio, Saiji 837 Watanabe, Mitsuharu 136 Watanabe, Motoya 694 Watanabe, Seiji 113 Wen, Bangchun 576, 582, 588, 593 Wu, Yan 593 X Xu, Xueping 448 Xu, Zili 483 Xueliang, Zhang 571 Y Yamada, Joji 6 Yamaguchi, Hirotaka 754 Yamaguchi, Takao 136 Yamashita, Masashi 628 Yamazaki, Daisuke 361 Yang, Zhou 538 Yao, Hongliang 576 Yoo, Hong Hee 50, 228 Yoon, Jae-San 512 Yoshida, Kazuhiro 177 Yoshida, Tatsuya 606, 837 Yoshida, Yuto 318 Yoshidomi, Mami 468 Yoshitake, Tatsuhiro 142 You, Junseok 823 Yu, Hyeon-Tak 386 Z Zakaria, M. K. 525 Zhang, Chunmei 483 Zhang, Nong Zhang, Su 368, 566 42 Zhang, Yimin 538 Zhao, Chunyu 588 Zhu, Sangzhi 566 Zongyan, Wang 571 Proceedings of the 16th Asia Pacific Vibration Conference. Bach Khoa Publishing House, Hanoi 1 – Dai Co Viet – Hanoi Tel. (84.4) 3868 4569; Fax. (84.4) 3868 4570 http://nxbbk.hust.edu.vn -----***----- Responsible for Publication Director and Editor-in-Chief: Dr. Phung Lan Huong Technical Editors: Nguyen Quang Hoang Nguyen Van Quyen Tran Ngoc Huan Produced at: Bach Khoa Publishing House, Hanoi, 01 Dai Co Viet Street, Hai Ba Trung District, Hanoi. Quantity: 300 CD. Registration No.: 3317 – 2015/CXBIPH/02 – 83/BKHN. ISBN: 978-604-938-726-5. Archived: IV – 2015.