pdf file - IBM Research
advertisement

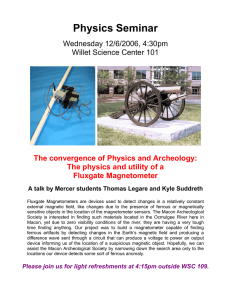
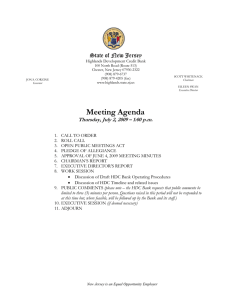
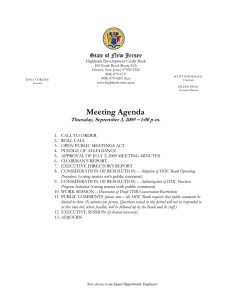
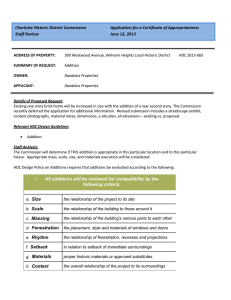
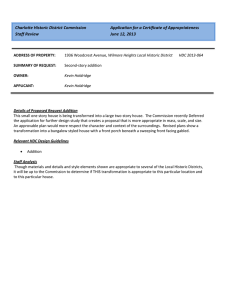
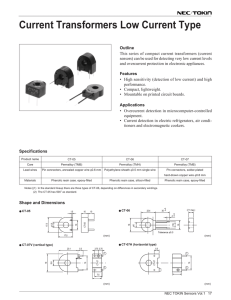
A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. G. DEAK and R. H. KOCH IBM T. J. Watson Research Center, Yorktown Heights, NY G. E. GUTHMILLER and R. E. FONTANA, Jr. IBM Almaden Research Center, San Jose, CA Abstract A model describing the dynamic response of a single-domain fluxgate magnetometer over a wide range of operating conditions in terms of a single measurement of a hysteresis loop or the permeability of the fluxgate’s ferromagnetic core is presented. The model is based on the Landau-Lifshitz-Gilbert equation, which describes the dynamics of a coherently rotating ferromagnet. Measurements of the response of a permalloy thin-film fluxgate and a molybdenum-permalloy tube fluxgate demonstrate the accuracy and limitations of the model. 1 Fluxgate magnetometers are extremely sensitive room-temperature vector magnetic-field sensors that are ideally suited for applications that require high sensitivity and robust performance under extreme conditions. Typical applications for these sensors have included submarine detection, surveillance, non-destructive testing, satellite orientation, compasses for vehicle guidance systems, and precise measurement of variations in the Earth’s magnetic field. In spite of a long history of successful applications, a quantitative theory of the factors that limit the sensitivity of these devices has not been developed. This is in part due to the nonlinear response of the fluxgate’s ferromagnetic core to excitation fields and also to a wide variety of fluxgate implementations with different core geometries and materials which can result in different dominant noise producing mechanisms. A fluxgate magnetometer is composed of a ferromagnetic core, which in the simplest implementation, is wound with two coils. The two core geometries that we have simulated are shown schematically in Figure 1. One coil, the drive coil, is used to produce an alternating magnetic field, Hdrive, which periodically saturates the core first in one and then in the opposite direction. The drive coil for the thin film fluxgate is not shown in Figure 1. The second coil, the pick-up coil, is used to detect the change in magnetic flux in the core. In the absence of an offset field, Hdc, the drive field saturates the core symmetrically around zero field, so that the voltage induced in the pick-up coil only contains odd harmonics of the drive frequency, ωο. When Hdc is nonzero, the core remains in saturation longer for one direction of Hdrive, than the other. This asymmetric saturation produces even harmonics, whose phase and amplitude are indicative of the polarity and magnitude of Hdc. The second harmonic is typically used as a measure of 2 Hdc.1 The second harmonic is used, as opposed to the 0’th for instance, because of the difficulty of inductively coupling to and measuring a signal at or near zero frequency. Recently, improved noise performance on the order of 1 pT/rtHz at 1 Hz has been demonstrated in fluxgates that keep the sensor’s ferromagnetic core saturated during the entire drive cycle. 2,3 The noise reduction in these “single-domain” fluxgate magnetometers is due to suppression of Barkhausen noise.2 The magnetization noise in these single-domain fluxgates was found to be approximately independent of drive conditions if Hdrive is large.4 This suggests that the noise is intrinsic to the core material and not a result of residual domains. It is possible that the type of noise in a singledomain fluxgate magnetometer also limits the performance of other well-optimized fluxgate designs. In order to develop a foundation for understanding the origin of this residual noise, we present a dynamic model of the response of a single-domain fluxgate. The model is based on the Landau-Lifshitz-Gilbert (LLG) equation, which describes the dynamics of a coherently rotating ferromagnet.5 In SI units, the most general form of the LLG equation is dM = -γM x µoHeff , dt (1) where M is the magnetization of the material, γ the gyromagnetic constant, and Heff is an effective magnetic field, which includes contributions due to the external field, anisotropy, demagnetization, and a field describing the damping of the precession of M. Heff may be expressed as Heff = H - αeff dM , γµοMsat dt (2a) 3 i i i i H = Ho - n M , (2b) where i = (x,y,z) is an index representing a vector component, Ho = Hext + Hdrive(t), ni = ki + di the sum of anisotropy and demagnetization constants, Msat the saturation magnetization, and αeff an effective damping parameter. Here the anisotropy is expressed in a dimensionless form k = 2K/µoMsat2. K is the anisotropy constant in SI units (J/m3). We define αeff as an effective damping parameter for a macroscopic ferromagnetic object. In this paper we use the Gilbert and Kelly form of the LLG equations since the value of αeff exceeds 1. To convert αeff and γ to the values for the Landau and Lifshitz form, both be divided by (1+α2). The value of αeff is intended to reflect all loss mechanisms, including eddy currents and nonlinear effects. It is therefore not intrinsic to the material, and its value, which can be several orders of magnitude larger than the intrinsic values measured by ferromagnetic resonance,6 depends on excitation conditions as well as sample geometry. In order to model a fluxgate’s response, the LLG equation is integrated to find the time-dependent magnetization, M(t), which is the field that induces the voltage in the fluxgate’s pickup coil. Here we model the response of single-domain fluxgate magnetometers. The orientation of the fields used to obtain single-domain operation is shown in Figure 1. Our single-domain fluxgates have an easy axis perpendicular to Hdrive, and thus an easy-axis bias field is included in the model. There is, however, no fundamental reason that a fluxgate model based on the LLG equation should be restricted to this geometry. The responsivity of a single-domain fluxgate to a dc field, Hdc, may be defined in terms of the magnetization as 4 M2 Hdc = Lim æ |µ2(Hdc,Hdrive,Heasy)| |Hdrive|ö ç ÷, Hdc→ 0 è Hdc ø (3) where M2 is the second harmonic of M(t), Heasy a dc easy-axis bias field, Hdrive the peak amplitude of the sinusoidal drive field, and |µ2(Hdc,Hdrive,Heasy)| is the magnitude of the second-harmonic complex permeability induced by Hdc. The second-harmonic permeability is defined as follows µ2(Hdc,Hdrive,Heasy) = µ 2’(Hdc,Hdrive,Heasy) + iµ2”(Hdc,Hdrive,Heasy) , (4a) with µ m’ = τ 1 ó M(t) sin(mωοt)dt τ õ 0 µo Hdrive , (4b) and µ m” = τ 1 ó M(t) cos(mωοt)dt τ õ 0 µo Hdrive , (4c) where τ is the period of Hdrive and m = 2. The responsivity is defined in terms of magnetization rather than voltage because the pick-up coil voltage is not an inherent property of the core. In order to convert to a more familiar form, M2/Hdc can be scaled as follows M2 æ Volt ö Responsivity çturn Tesla÷ = 2ωο . Acore . Geometric factor . H , è ø dc (5) 5 where ωο is 2π times the drive frequency, Acore is the cross-sectional area of the ferromagnetic core, and the geometric factor is constant less than one describing the coupling between the pick-up coil and the core. The key to modeling the fluxgate’s response using the LLG equation is to accurately determine the anisotropy, demagnetization, and effective damping parameters in Equation 2. The effective damping parameter can be determined from either a M(H) loop recorded at one frequency or more simply as we show below from the first-harmonic permeability. In most cases, a single determination of αeff is sufficient to describe a single-domain fluxgate’s response over a wide range of easy axis bias fields, drive frequency, and drive amplitude. As a demonstration of the technique, we solve the LLG equation for hard-axis permeability of a thin film as a function of a Hdrive, αeff, ωo, and dc easy-axis bias field. We do this for clarity, since in practice, the LLG equation can be solved numerically for the first-harmonic permeability in any arbitrary geometry and configuration of fields. When a small oscillating field, Hzsin(ωot), is applied along the hard axis of a ferromagnetic film, the LLG equation can be reduced to αeff dMz(t) æ ö + µoçHeasy + (k+d) Msat ÷ Mz(t) = Msat µo Hz sin(ωot) . dt è ø γ (6) Here Mz(t) and Hz are the time-dependent magnetization and the amplitude of the drive field in the hard direction. Note that Equation (6) is first order and is intended for the overdamped limit where αeff is large. Equation (6) is easily solved for the complex permeability, yielding 6 Msat µstatic = (k+d) M + H sat easy (7a) -1 µstatic µ1’ = ≈ µstatic -2 æ ωoαeff ö2 µstatic + ç ÷ èγµοMsatø (7b) æ ωoαeff ö -ç ÷ èγµοMsatø æ ωoαeff ö 2 µ1" = ≈ -ç ÷µ -2 æ ωoαeff ö2 èγµοMsatø static µstatic + ç ÷ èγµοMsatø (7c) at low frequency. Here, µstatic is the permeability of the single-domain ferromagnetic core in the limit of zero frequency and small Hz. Since Heasy is known, if necessary, Msat can be determined from µ1’, so that αeff can be determined from µ1”. Simulations of the magnitude of M2/Hdc for fluxgates made from permalloy thin films and molybdenum permalloy tubes are presented below in order to demonstrate the accuracy and limitations of the single-domain fluxgate model. The simulations are based on αeff determined from simulations of the hard-axis M(H) loops of the tubes and from measurements of the permeability of the thin films. All parameters used in the simulations are summarized in Table 1. The films used in this study were composed of 82-18 permalloy that was sputtered onto glass substrates in the presence of a magnetic field in order to induce an in-plane uniaxial anisotropy. The films were 4700 Å thick and were patterned into a 0.025 m diameter circle. The tubes were machined from 4-80-15 molybdenum permalloy rods to a length of 0.05 m with an outer diameter of 0.0038 m and a wall thickness 0f 0.00051 m. After machining, a circumferential uniaxial anisotropy was induced in the tubes by vacuum annealing in the presence of a circumferential 7 magnetic field. When operated as a fluxgate, an easy-axis bias field large enough to keep the samples saturated at all times during the drive cycle, was applied to both the films and the tubes. This was done in order to keep them from breaking up into domains.2 Low-frequency hard-axis M(H) loops for the permalloy thin film are shown in Figure 2(a) and those for the molybdenum permalloy tubes are shown in Figure 2(b). The M(H) loops in Figure 2(a) are for two different orientations of Hdrive with µoHeasy = 0 T, while those in Figure 2(b) are for two different values of Heasy when Hdrive is applied along the hard-axis. When driven along the hard direction with µoHeasy = 0 T, both the films and the tubes show linear response when unsaturated. This indicates that the magnetization behaves as one would expect for coherent rotation,7 so that the singledomain fluxgate model should be applicable to both core geometries. A measurement and simulation of the in and out-of-phase components of the complex permeability, µ1’ and µ1”, of the permalloy thin film are shown in Figure 3. Here, Hdrive is applied in the hard direction at a frequency of 22300 Hz and µoHeasy = 0.0001 T. This orientation of the fields and the amplitude of Heasy were chosen to insure that the dynamic mode of the film during the permeability measurement is the same as that in the fluxgate responsivity measurement presented below. Using permeability data in Figure 3 and the saturation magnetization determined from Figure 2(a), equation (7) gives αeff = 22.5 and k = 0.0009. In order to show that equation (7) is consistent with the LLG equation, simulations of the permeability determined from equations (1), (2), and (4), using the above αeff and k values are shown as dashed lines in Figure 3. Figure 4(a) shows the simulated and measured magnitude of the responsivity of the permalloy thin film fluxgate using αeff and k determined from Figure 3. The symbols 8 are actual data from the thin-film fluxgate measured at four different Heasy values and a frequency of 22420 Hz. The dashed lines are a simulation of equation (3). In spite of the fact that αeff was determined at one Heasy field, the simulation is capable of describing M2/Hdc over a wide range of fields. Figure 5 is a plot of the simulated magnitude of M2/Hdc and the frequency, fpeak = γµοMsat/(2παeffµstatic), where µ1”, determined from Equation (7c), is a maximum as a function of αeff. The phase of M2/Hdc with respect to Hdrive shifts strongly in the vicinity of fpeak. As long as one is only interested in the magnitude of M2/Hdc, however, an accurate value of M2/Hdc may be determined for any value of αeff chosen so that fpeak is much greater than the drive frequency. It is generally a good idea to operate a fluxgate at a frequency lower than fpeak, since the magnitude of M2/Hdc tends to become small at higher frequency. Figure 4(b) shows the simulated and measured magnitude of M2/Hdc for the molybdenum permalloy tube fluxgate as a function of Hdrive for two values of Heasy. In this case, αeff, k, and Msat were determined by simulating the M(H) loop with µoHeasy = 0 T, shown in Figure 2(b). In Figure 4(b), Hdrive was applied as a 260 Hz triangle wave. Because in this case, the change in permeability of the tube during the drive cycle is large enough to alter the drive waveform, the model was modified to include the inductance of the drive coil and the capacitance of a capacitor connected in series between the drive amplifier and the drive coil. With these modifications, the agreement between measurement and simulation is good enough to be useful, but it is not as good as that for the thin film fluxgate. There are several reasons why this might be the case. First, note that in the case of the thin film, d is the same in all directions in the plane of the 9 magnetization. It is therefore not likely that the distribution of the magnetization changes much during the fluxgate’s drive cycle. In the case of the tube, d differs by several orders of magnitude between the easy and hard directions, so that as the magnetization configuration is changed, the single domain approximation for the core of this fluxgate is not as good as in the case of the thin film core. A second consideration deals with the difference between feddy and fpeak shown in Table 1. The frequency, feddy ≈ ρ/(2πµot2) for the tube and feddy ≈ 2ρ/(πµot2) for the film, is the frequency where Hdrive would just fully penetrate the core if it were composed of a normal metal (µstatic = 1). This is the frequency where µ1” would exhibit a maximum if all dissipation was due to eddy currents.8 Here, ρ is the resistivity, and t is the sample thickness. If fpeak is near feddy, then damping is dominated by eddy currents. Since eddy current damping is dependent on µ(Hdrive), αeff will depend on Hdrive. fpeak for the tube is orders of magnitude closer to feddy than it is for the film, indicating that eddy currents play a much more important role in the tubes than in the films. In summary, it is clear that any process which leads to nonlinear damping is difficult to simulate. In particular, one should be careful when simulating fluxgates where the d values relevant to the magnetization during the drive cycle are orders of magnitude different, and where eddy current damping dominates. A simple extension of the single-domain fluxgate model would be to use the stochastic LLG equation, which includes thermal noise as a Langevin term.9 Although a model of this type cannot describe non-equilibrium noise, preliminary work with the stochastic model has suggested a resolution limit of several hundred fT/rtHz for permalloy fluxgates due to thermal noise if all non-equilibrium noise sources are suppressed.4 10 A dynamic model based on the LLG equation describing the response of a singledomain fluxgate magnetometer over a wide range of operating conditions in terms of a single measurement of a hysteresis loop or the permeability of a fluxgate’s ferromagnetic core was presented. Measurements of the response of a thin-film permalloy fluxgate and a molybdenum permalloy tube fluxgate demonstrate the model’s accuracy and utility in studying fluxgate response. We have found a characteristic frequency, fpeak, above which a fluxgate’s responsivity decreases. The single-domain fluxgate model breaks down when αeff is dependent on drive conditions, and we show evidence suggesting that this is likely to occur when damping becomes dominated by eddy currents or when the demagnetizing fields are strongly dependent on relevant orientations of the magnetization. In either of these cases, it is probably necessary to determine the dependence of αeff and di on drive conditions. Finally, we suggest that although the model was intended for single-domain fluxgates, it should provide a good approximation to the response of a fluxgate made from a multidomain core, if the Hdrive dependence of αeff and di are included in equation (2). We would like to thank J. R. Rozen and P. R. Duncombe for help with the preparation of the molybdenum permalloy tubes and F. Milliken for reviewing the first draft of this paper. 11 References 1. F. Primdahl, IEEE Trans. Magn. MAG-6, 376 (1970); P. Ripka, Sensors and Actuators 33, 129 (1992). 2. J. Deak, A. H. Miklich, J. Slonczewski, and R. H. Koch, Appl. Phys. Lett. 69, 1157 (1996). 3. Deak, Koch unpublished data on 6-82 Molypermalloy sensors with 1.5 pT/rtHz at 1 Hz. 4. R. H. Koch and J. Deak (unpublished). 5. L. Landau and E. Lifshitz, Phyzik. Z. Sowjetunion 8, 153 (1935); T. L. Gilbert and J. M. Kelly, Proceedings of the Pittsburg Conference on Magnetism and Magnetic Materials (American Institute of Electrical Engineers: New York) p. 253 (1955); T. L. Gilbert, Phys. Rev. 100, 1243 (1955). 6. R. L. Conger and F. C. Essig, Phys. Rev. 104, 915 (1956). 7. B. D. Cullity, Introduction to Magnetic Materials, (Addison-Wesley, Reading, MA, 1972). 8. J. R. Clem in Magnetic Susceptibility of Superconductors and Other Spin Systems, (Plenum:New York) p. 177 (1992). 9. W. F. Brown, Phys. Rev. 130, 1677 (1963); D. A. Garanin, Phys. Rev. B. 55, 3050 (1997). 12 Tables Table 1. A summary of the parameters used in simulations of the responsivity of fluxgates made from the thin films and tubes. Here µoMsat is the saturation magnetization, K the uniaxial anisotropy constant, k the uniaxial anisotropy constant in dimensionless form, d the demagnetization factor along the drive field direction, αeff the effective damping parameter, feddy the frequency where the magnetic field penetration depth along the drive direction for a saturated core is equal to the core thickness, fpeak the frequency where Equation (7c) is a maximum, and fdrive the drive frequency. 13 Figures Figure 1. Schematic drawing of a tube core and thin film fluxgate magnetometers. The drive coil is not shown for the thin film geometry. Figure 2 (a) M(H) loops measured with the applied drive field along the hard and easy axes of a permalloy film, and (b) M(H) loops measured in the axial direction of the molybdenum permalloy tubes as a function of an easy-axis bias. Figure 3. Measured and simulated amplitude dependence of µ1’ and µ1” for the permalloy thin film. This simulation is used to determine damping and anisotropy parameters. Figure 4. (a) Hdrive dependence of the fluxgate responsivity measured and simulated with µoHeasy = 0.0029, 0.0047, 0.0086, and 0.00102 T for the permalloy thin film and (b) with µoHeasy = 0 and 0.0004 T for the molybdenum permalloy tubes. Figure 5. A plot of the a dependence of the magnitude of M2/Hdc and the calculated frequency of the peak in µ”. 14 µoMsat (T) K (J/m3) k d αeff feddy (Hz) NiFe thin film 0.95 320 9.0e-4 1e-5 22.5 2.2e11 1.0e6 2.2e4 MoNiFe tube 0.8 74 1.5e-4 4.3e-3 1092 2.7e5 8.8e4 260 fpeak (Hz) fdrive (Hz) Table 1 A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. Drive Coil Pickup Coil Hdrive + Hdc Heasy permalloy tube tube fluxgate Hdrive + Hdc Pickup Coil Heasy permalloy film thin film fluxgate Figure 1 A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 20 10 82-18 permalloy film f = 10 Hz dc bias Beasy = 0 T 0 Flux (nWb)Bdrive || hard axis -10 Bdrive || easy axis -20 -0.0010 -0.0005 0.0000 moHdrive (T) 0.0005 0.0010 Figure 2(a) A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 0.8 0.6 0.4 molybdenum permalloy tube 10 Hz drive 0.2 0.0 M (T) mo-0.2 -0.4 moHeasy = 0.0004 T -0.6 moHeasy = 0 T -0.8 -0.004 -0.002 0.000 0.002 0.004 moH (T) Figure 2(b) A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 1200 100 a = 22.5 kx = 0.0009 80 moMsat = 0.95 T 1000 800 ' 1 600 m 400 200 4700 Å thick 82-18 permalloy film f = 22300 Hz moHeasy = 0.0001 T 60 m " 1 40 20 0 0 0.0000 0.0003 0.0006 0.0008 0.0011 0.0014 0.0017 0.0020 moHdrive (Tpeak) Figure 3 A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 250 moHeasy = 0.00029 T 200 150 dc /H 2 M100 moHeasy = 0.00102 T 50 0 0.000 thin-film permalloy fluxgate f = 22420 Hz 0.001 0.002 0.003 moHdrive (Tpeak) 0.004 Figure 4(a) A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 80 60 molybdenum permalloy tube fluxgate 260 Hz simulated moHeasy = 0.0002 T moHeasy = 0 T dc 40 /H 2 M measured moHeasy = 0.0002 T moHeasy = 0 T 20 0 0.000 0.002 0.004 0.006 0.008 0.010 0.012 0.014 moHdrive (T peak) Figure 4(b) A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr. 200 8 10 characteristic frequency 150 100 /H 2 M 7 10 6 10 responsivity 50 0 5 f 10 peak (Hz) 4 10 2wo dc simulated thin film fluxgate driven at 22420 Hz moHeasy = 0.00102 T 3 10 2 10 1 1 10 100 1000 10000 100000 10 aeff Figure 5 A Dynamic Calculation of the Responsivity of Monodomain Fluxgate Magnetometers J. Deak, R. H. Koch, G. E. Guthmiller, and R. E. Fontana, jr.