Synchronous Voltage Reversal control of TCSC – impact on SSR
advertisement

> Reference number: 035<
1
Synchronous Voltage Reversal control of TCSC
– impact on SSR conditions
Hailian Xie
Lennart Ängquist
Master student
Researcher
Royal Institute of Technology, Stockholm
Abstract—The paper describes the laboratory setup of a
TCSC model. A new control scheme named SVR
(Synchronous Voltage Reversal) control is employed
instead of the traditional firing angle control scheme. The
impact of the SVR controlled TCSC on SSR is investigated
in this real-time simulator by analysing the system
damping. Some results are presented graphically together
with conclusions.
Index Terms— Series compensation, SSR, TCSC, Boost
control.
Fig. 1. TCSC main circuit
I. INTRODUCTION
S
eries compensation is an effective mean to increase the
electrical power transfer capability of high-voltage
transmission lines. Insertion of a capacitive reactance in series
with the line’s inherent inductive reactance lowers the total,
effective impedance of the line and thus virtually reduces its
length. As a result both angular and voltage stability in the
power system gets improved.
A side effect of the inserting a series capacitor in series
with the transmission line is that an electrical resonance will
be introduced. In the 70’ies it was experienced that this
electrical resonance may be harmful if a series compensated
transmission line is connected electrically close to a thermal
power station. The reason is that the shaft system joining the
electrical generator with the various turbine stages exhibits
mechanical torsional resonance at various “subsynchronous”
frequencies, i.e. frequencies below the nominal 50 or 60 Hz
frequency of the network. At certain unfavourable relations
between the electrical and mechanical resonance frequencies
oscillations with exponentially increasing amplitude can be
excited spontaneously. This condition is being referred to as a
Torsional Interaction SubSynchronous Resonance “TI-SSR”.
This condition potentially may cause damage to the generator
with severe consequences for the power supply and causing
harsh economical loss.
During the 90’ies the Thyristor Controlled Series Capacitor
(TCSC) was being introduced. In this apparatus a thyristor
controlled, inductive branch has been connected as an add-on
in parallel with the series capacitor bank (Fig. 1.).
When a forward-biased thyristor is fired the capacitor will
be partially discharged through the LC circuit constituted by
the thyristor controlled inductive branch and the capacitor
bank. The circulating current pulse passes through the
capacitor in phase with the line current. It creates an
additional voltage across the capacitor in excess of the
voltage, which is caused by the line current. The increased
voltage at a given line current amplitude is perceived by the
transmission system as if the inserted capacitive reactance had
been increased or “boosted” by the action of the thyristor
valves. The generic waveform of the TCSC is shown in Fig. 2.
2
0
-2
5
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0
-5
50
0
-50
0
-20
-40
Fig. 2. Generic waveforms for the TCSC. From top to bottom: line current,
valve current, capacitor voltage, apparent reactance
It was recognized early that the characteristics of the TCSC
with respect to SSR differed completely from that of a
passive, fixed series capacitor. The latter reveals a capacitive
> Reference number: 035<
2
reactance, which is inversely proportional to the frequency.
Accordingly it tends towards infinity at zero frequency (DC).
The apparent reactance of the TCSC, in contrast, decreases
with frequency and gets zero at zero frequency (DC). The
reason for this dissimilarity is that the TCSC reacts on an
injected subsynchronous line current component by
modulating the thyristor current in the inductive branch. This
influences the subsynchronous current passing through the
capacitor, which determines the subsynchronous voltage
across the TCSC.
The algorithm that has been selected for the thyristor
triggering control plays the main role in forming the
characteristics of the TCSC with respect to SSR behaviour.
However, also the regulators executing synchronization and
boost control do have an impact on the TCSC’s SSR
properties.
II. TCSC WITH SYNCHRONOUS VOLTAGE REVERSAL
CONTROL
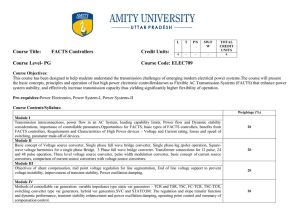
Figure 3 depicts a control system named Synchronous
Voltage Reversal (SVR) scheme, in which the boost
regulator provides the time reference for the capacitor voltage
zero-crossing instants rather than, as in conventional
approaches, the thyristor firing instants. A supplementary
device then determines the firing instant taking into account
actual line current and capacitor voltage values.
IL-meas
phase
comp
PLL
SVR
that can be utilized by eliminating the risk of SSR. A simple
explanation is as follows: an SSR condition can only arise
through interaction between a mechanical and an electrical
resonance at complementary frequencies. The effect of using
TCSC instead of fixed series capacitors is that the electrical
resonance frequency is pushed towards a lower frequency, as
if a lower degree of compensation had been used.
A. SVR control scheme
Traditional boost control method controls the firing
angle β = π − α of the thyristor. A rather non-linear relation
exists between the boost factor k B and the steady state
conduction angle σ = 2β making k B very sensitive to the
instant of triggering when the TCSC runs at a high boost
factor. Further, at transients, a complicated dynamic
characteristic governs the relation between the firing angle
and the conduction angle.
Instead of controlling the thyristor firing angle, another
control scheme, named ‘Synchronous Voltage Reversal’, is
being used. It aims for controlling the instant when the
capacitor voltage crosses zero [1]. Analysis of the TCSC
circuit during the conduction interval shows that the capacitor
voltages at the start and end instants of the conduction have
the same magnitude but with opposite sign. Therefore, the
effect of the conduction of the thyristor controlled inductance
branch can be represented by an equivalent, instantaneous
voltage reversal. In steady state when there is no change in the
boost factor, the zero-crossing point of the capacitor voltage
will coincide with the peak point of the line current, called
equilibrium point of the synchronous voltage reversal.
However, if the zero-crossing occurs at a point other than the
equilibrium point, e.g. with an angular displacement of ∆ϕc as
shown in Figure 4, the boost factor will change according to
(1).
uc
iL
UC
Phasor
eval
IL
UC-meas
Boost
meas
Boost
ref
α −
iv
π
2
β
Boost
contr
t
Fig. 3. Outline of TCSC boost control system (inner layer marked SVR)
It is shown in [1] that this approach ideally provides an
apparent inductive reactance of the TCSC for subsynchronous frequencies, independent of the boost level.
As a general rule the risk for SSR problems increases with
increasing degree of compensation of the transmission line.
Experience shows that normally 30 % of the line reactance
can be compensated by series capacitors without any risk of
SSR. However, from a power transmission point of view,
often more compensation is desired in order to improve
stability in the system, specifically during contingencies.
The use of TCSC can enhance the degree of compensation
∆ϕc
Fig. 4. Illustration of SVR control scheme
16 f N
∆ϕc
π s
where s is the Laplace operator.
∆k B =
(1)
> Reference number: 035<
3
In order to control the boost factor, it is advantageous to
immediately control the angular displacement ∆ϕc of the
synchronous voltage reversals from their equilibrium points.
It should be noticed that any change of the phase of the line
current would have the same impact on the boost factor as the
change of ∆ϕ c has. To eliminate this impact a Phase-LockedLoop (PLL) is introduced. The PLL works on the line current
and gives out the PLL angle θ PLL , which is used in the
coordinate transformation from the fixed coordinate system to
the rotating coordinate system and in the calculation of the
firing time.
Analysis of the circuit equation during the conduction
interval yields another expression for ucz [1]. Namely,
B. Synchronous voltage Reversal (SVR) equation
The output of the boost controller is the angular
displacement of the equivalent voltage reversals from their
equilibrium point ∆ϕ c . This angle displacement determines the
instant when the voltage zero-crossing should occur. The
voltage zero-crossing instant, together with ω PLL and the
tF = tZ −
known circuit parameters such as X0 and λ (see table 1), in
turn determines the firing time of the related thyristor.
Methods for calculating the firing time have been described in
[1]. The method used in the implementation is based on the
simple assumption that the line current is constant and equals
to the measured value during the interval between the
measurement and the firing time. Below a brief review of this
calculation procedure is presented.
First the notations are defined according to Fig. 5.
t M : the instant at which line currents and capacitor
voltages are sampled;
t F : thyristor firing instant.
t Z : the desired instant when the capacitor voltage zerocrossing occurs;
The PLL angles corresponding to these three instants are:
θ PLL _ M , θ PLL _ F , and θ PLL _ Z .
θ PLL_Z
θ PLL_F
β
π
2π
iL
∆ϕ c
0
u c ----without boosted
tF tZ
= uCM + X 0 i LM λω PLL (t Z − t M )
(2)
= uCM + X 0 i LM λ (θ PLL _ Z − θ PLL _ M )
uCZ = X 0iLM [λβ − tan(λβ )]
(3)
where β = ω PLL (t Z − t F ) is the angle difference between firing
time and voltage zero-crossing time.
By solving the nonlinear equation, which is obtained by
combining (2) and (3), β can be acquired.
The firing time is then obtained from (4):
β
ω PLL
(4)
C. Boost control system
The overview of the boost control system is shown in Fig.
3.
The line current and capacitor voltage are measured and the
components of fundamental frequency are extracted through
phasor estimation [3]. The complex quotient between these
two phasors gives the apparent impedance of the TCSC
capacitor bank. Normalizing the imaginary part of the
apparent impedance with the physical reactance of the
capacitor bank yields the measured boost factor, which will be
taken as a feedback signal and compared with the reference
boost factor. The error of the boost factor is delivered to the
boost controller, whose output can be visualized as a series of
time reference pulses that defines the instants when the
capacitor voltage should cross zero. The block named ‘SVR’
will determine the thyristor firing time taking into account the
measured line current and capacitor voltage and then trigger
the corresponding thyristor at desired instant.
In the KTH laboratory for electrical machine and power
electronics, a real-time power system simulator is being
implemented. The simulator contains a general-purpose
control system of type ABB Mach 2, which is adapted to
control power electronic apparatus for high-power
applications e.g. the TCSC.
θ PLL_M
tM
1
i LM ∆t
CTCSC
III. LABORATORY SET UP
PLL angle
PLL angle
uCZ = uCM + ∆uC = u CM +
tim e
Fig. 5. Illustration of SVR equation
As the first step, (2) gives an estimation of the capacitor
voltage at t Z based on the measured value of the line current
iLM and the assumption mentioned above.
A. Simulation system overview
Fig. 6 shows the TCSC simulation system, which is the
model of a simple transmission system. The system consists of
two voltage sources (an infinite bus and a source with source
impedance) and a transmission line compensated by a TCSC
in series with a fixed capacitor bank.
> Reference number: 035<
4
Thyristor
Valve
TCSC
inductance
Source 1 line
fixed
Impedance impedance capacitor TCSC capacitor
infinite
bus
Fig. 6. TCSC simulation system diagram
The part within the dashed-line frame forms the TCSC.
The thyristor valve module is designed with compensation
for the thyristor forward voltage drop during conduction and
for the resistive voltage drop in the TCSC inductor. With such
a design, the thyristor controlled inductance branch will
appear as an ideal thyristor valve in series with a pure
inductance.
The transmission lines in the power system are represented
by inductors and resistors.
The specifications of the simulation system are given in
Table 1.
simulate a voltage produced by a synchronous machine, for
which the shaft speed contains a small sinusoidal variation.
The generic voltage generated is derived assuming that the
rotor flux is constant in the rotor coordinate system [1]. For
oscillation frequencies in question with respect to Subsynchronous Resonance, i.e. 15-45 Hz mechanical
frequencies, this approximation seems to be adequate. At
these rotor frequencies, the resistance in the damper windings
has little impact and thus these windings serve as a magnetic
screen, which captures the rotor flux and prevents it from
being varied. The leakage between the stator winding and the
damper windings is represented by the subtransient reactance
and the rotor flux behind that reactance can be considered to
be constant in the rotor-fixed coordinate system.
This means that the sub-transient reactance of the machine
should be incorporated with the transmission system when the
analysis is being performed. Similarly the stator resistance can
be incorporated with the transmission system impedance. The
machine model is shown in Fig. 7 within the dashed frame.
us =
dψ r
Rsource XL_source
dt
Rline XL_line
Infinite bus
Table 1 specification of the simulation system
Parameter
Notation
Value
Source resistance
[Ω]
Rsource
0.98
Fig. 7. The generator model
Source reactance at fN
[Ω]
XL_source
9.5
Source inductance
[mH]
Lsource
30.3
2) Formulas for generated voltage
Assume that rotor flux is constant in the rotor reference
frame and is given by
Figure 2.2. Generator model
Line resistance
[Ω]
Rline
1.86
Line reactance at fN
[Ω]
XL_line
23.6
Line inductance
[mH]
Lline
75.1
Fixed capacitor bank
[µF]
Cfixed
550
Fixed capacitor reactance at fN [Ω]
Xc_fixed
5.79
TCSC capacitor bank
CTCSC
650
TCSC capacitor reactance at fN [Ω]
Xc_TCSC
4.90
TCSC inductance
LTCSC
2.45
[µF]
[ mH ]
λ(ratio
between
the
TCSC
resonance frequency and fN)
TCSC resonance frequency [ Hz ]
f0
126
TCSC capacitor reactance at f0
X0
1.94
[Ω]
ψ RR (t ) ≡ ψˆ R
(5)
The mechanical angle of the shaft is θ sh (t ) with respect to a
certain reference angle in the stator.
Generally, the stator flux in the rotor coordinate system is
given by:
ψ sR = L's' ⋅ isR + ψ RR
(6)
2.52
Since the transient reactance of the generator has be
incorporated into the transmission system, the flux then
becomes:
ψ sR = ψ RR = ψˆ R
B. Voltage sources
The source voltages are generated by electronic power
amplifiers controlled by a DSP. The selected power scale
utilizes 10 3 V rms as the nominal line-line voltage (might
correspond to 500 kV) and 8VA as a nominal power (might
correspond to 1000 MVA).
1) Generator model
In order to investigate the impact of the TCSC on SubSynchronous Resonance, one of the voltage sources should
(7)
Accordingly, in the stator coordinate system, the stator flux
becomes
ψ SS (t ) = ψˆ R e jθ sh (t )
(8)
Assume that the nominal angular frequency is ω N . Then
the induced stator voltage is given by
> Reference number: 035<
u SS (t ) =
5
θ&
1 dψ SS
= jψˆ R sh e jθ sh (t )
ω N dt
ωN
(9)
Let the normalized shaft speed be defined by
nsh (t ) =
θ&sh (t )
ωN
u
t
(
)
a 1
1
ub (t ) = −
u (t ) 2
c 1
−
2
0
3 uα (t )
2 u β (t )
3
−
2
(16)
(10)
With all the above equations implemented in the DSP and
the scaling adjusted, two source voltages are obtained with
one per unit voltage corresponding to 10V rms phase voltage.
Then (9) yields
u SS (t ) = jψˆ R nsh (t )e jθ sh (t )
(11)
IV. SSR
a)
Voltage generated in the infinite bus
For the infinite bus, the generator shaft angle is given by
(12):
θ sh (t ) = ω N t + ϕ
(12)
where ω N is the nominal angular frequency and ϕ is the
phase angle.
Inserting (12) to (11) yields the generated voltage vector.
b)
Voltage generated with Shaft torsional oscillation
Assume that the generator is running with nominal average
speed but with a small super-imposed sinusoidal phase angle
variation with amplitude ∆θˆ and frequency Ω ; and assume
the phase is ϕ .
{
}
θ sh (t ) = ω N t + Re ∆θˆ e jΩt + ϕ
(13)
The corresponding normalized speed variation can be
obtained from (10), which yields
{
nsh (t ) = 1 + Re ∆nˆ e jΩt
∆nˆ = j
Ω
ωN
(14)
Insertion of (13) and (14) in (11) defines the voltage
generated in the stator. This voltage contains both the nominal
fundamental frequency and side-bands at frequencies that
deviate from the fundamental frequency by the mechanical
oscillation frequency. However, in the DSP program the
general formula without linearization is utilized.
Equation (11) gives out the voltage space vector in the
stator coordinate system, i.e.,
u SS (t ) = uα (t ) + ju β (t )
A. Analysing method
1) Electrical torque
The source voltage generated by the DSP as stated in
Chapter 2 is a simulation of a turbine-generator, whose shaft
angle is modulated with a frequency of Ω and amplitude ∆θˆ ,
i.e., with an angular deviation from its steady state:
)
)
∆θ = Re(∆θ e jΩt ) = ∆θ cos Ωt
(15)
The three phase quantities of the generated voltage can be
obtained by the following transformation [2]:
(17)
Correspondingly, the speed variation is:
∆n = −
Ω
ωN
∆θˆ sin Ωt
(18)
With the generated source voltages connected to the
simulation system, the line currents that occur are measured
and returned into the DSP. The electro-dynamical torque now
can be calculated from the generated voltage and the measured
current according to (19)
{
}
∆θˆ
With the TCSC simulation system runs with a shaft angle
modulated voltage source, the damping performance of the
system with respect to SSR has been investigated.
Tel (t ) = Im iSS (t )e − jθ sh (t )ψˆ R
}
(19)
The electrical torque contains two components, the steady
state one Tel _ av and the variation one ∆Tel as shown in (20).
Tel (t ) = Tel _ av + ∆Tel
(20)
The variation component ∆Tel is caused by the angle
modulation of the generator shaft and thus has the same
frequency Ω as the shaft oscillation. Therefore, ∆Tel can be
expressed as (21).
{
}
∆Tel = Re ∆Tˆel e jΩt
= Re Re(∆Tˆel ) + j Im(∆Tˆel ) e jΩt
= Re(∆Tˆ ) cos Ωt − Im(∆Tˆ ) sin Ωt
{[
el
] }
el
(21)
> Reference number: 035<
6
~
Ω
∆Tel = − K el ∆θˆ cos Ωt − Del (− ∆θˆ
sin Ωt ) (22)
ωN
Here K el and Del can be identified as the ‘electrical spring
constant’ and ‘electrical damping factor’ respectively.
Comparing (21) and (22) yields:
~
− Re(∆Tˆel )
K el =
∆θˆ
~
− Im(∆Tˆel )ω N
Del =
∆θˆ Ω
(23)
Equation (23) gives the spring constant and damping factor
of the system with a certain shaft modulation frequency.
In order to measure the damping coefficient in the subsynchronous frequency range, a MATLAB program is applied
to interface the DSP, which controls the generated voltage.
The MATLAB program will automatically perform the
investigation by commanding various oscillation frequencies
and recording the measured results. Every time MATLAB
commands a new frequency to the DSP, a new source voltage
with that new modulation frequency will be generated. With
the measured line current sent back to DSP, the DSP could
calculate the electrical torque, extract the component with the
modulation frequency and split it into real part and imaginary
part. The MATLAB program reads these two parts of the
torque phasor from the DSP and calculates the spring constant
and the damping coefficient. Finally, the program generates
the curve showing the damping coefficient and the spring
constant as functions of mechanical modulation frequency.
B. SSR behaviour of the TCSC
The simulation results for several cases will be presented in
this part.
As a first example, the simulated transmission line is
compensated by a fixed capacitor bank of 224 µF which gives
a compensation of Xc = 14.2 Ω
In this case, the electrical resonance frequency of the
transmission system will be:
1
2π ( Lsource+ Lline ) C fixed
1
2π (75.12 + 30.25) * 224*10−9
(24)
= 32.8 Hz
Theoretically, this is the complementary frequency of the
critical undamping mechanical frequency, which will be
testified by the actual damping curve plotted in Fig. 8.
Del & Kel with fixed series compensation
5
Del [pu trq/pu spd]
~
pass filters these two parts, Re(∆Tˆel ) and Im(∆Tˆel ) , can be
extracted.
2) Damping curve
Generally, the torque variation can be resolved into two
parts, proportional to the angular variation and the speed
variation respectively, i.e.,
=
0
-5
-10
-15
10
15
20
10
15
20
25
30
35
40
45
25
30
mech freq [Hz]
35
40
45
3
Kel [pu trq/rad]
It can be observed that the variation component can be split
into two parts, in phase with the speed variation and the
angular variation respectively. By utilizing three 1st-order low
fo _ line =
2
1
0
-1
-2
Fig.8. Electrical damping (Del) and spring constant (Kel) for system with
fixed series compensation
The figure shows that with a torsional shaft vibration
frequency of about 17 Hz, the fixed series compensated
system has a large negative damping, which means high
danger to the generator shaft.
Then the 224 µF fixed capacitor bank will be replaced by a
combination of a 550 µF fixed bank in series with the TCSC.
When the TCSC operates at a boost factor of 1.72, the total
compensation becomes:
Xc = Xc _
fix
+ k B ⋅ X c _ TCSC
= 5.787 + 1.72 ⋅ 4.897 = 14.2Ω
(25)
This gives the same compensation degree at network
frequency as the 224 µF capacitor bank.
Let the gain of PLL and boost controller both be very low
(0.015) and the integrating part be very slow so that the
damping characteristic is determined almost completely by the
SVR control scheme. Fig. 9 presents resulted damping curve
for boost factor 1.2 and 1.72.
> Reference number: 035<
7
while as increases the undamping peak values.
S V R c ontrol, no P LL, no boos t c ontrol
2
SVR, KB=1.72, medium boost control with different PLL speed
0
4
Del [pu trq/pu spd]
Del [pu trq/pu spd]
4
-2
-4
-6
10
15
20
25
30
35
40
45
2
1
-6
10
15
20
25
30
35
-1
10
15
20
25
30
m ec h freq [Hz ]
35
40
45
When compared with figure 8 it can be seen that the critical
undamping frequency is pushed rightward, from about 17 Hz
to 31 Hz. The use of the TCSC with SVR control scheme
makes it possible to utilize high compensation even in a
system fed by a generator having a torsional resonance
frequency about 10 Hz higher than if only fixed series
compensation is used.
It should also be noted that the discrepancy between
different boost factors is quite small. This implies that the
TCSC using SVR control can mitigate SSR problems even
when operating at low boost factor. Direct control of the
thyristor fire angle does not provide similar performance.
Fig. 10 gives a comparison between these two control
methods both with a boost factor of 1.2. It shows that SVR
can provide much better damping for frequencies lower than
25 Hz.
•
•
•
[1]
-2
[2]
-4
20
25
30
35
40
45
3
SVR control
beta control
2
1
0
-1
10
15
20
25
30
mech freq [Hz]
35
15
20
25
30
mech freq [Hz]
35
40
45
V. CONCLUSION
0
15
10
At low boost factor, SVR controlled TCSC can
provide much better damping than conventional
control scheme that controls the firing angle
directly.
The damping characteristic of SVR controlled
TCSC with respect to SSR is almost independent of
the boost factor.
The tuning of the boost controller and PLL makes
no critical difference on the TCSC SSR behaviour.
REFERENCES
2
10
0
Fig.11. SVR control; medium boost control; Boost factor 1.72; slow PLL
(thick line); medium PLL (dashed line); fast PLL (thin line)
KB=1.2, no PLL, no boost control
-2
45
slow
medium
fast
2
-2
4
-6
40
4
Fig.9. SVR control; no PLL, no boost control; Boost factor 1.2 (thick line);
boost factor 1.72 (thin line)
Del [pu trq/pu spd]
-4
0
-2
Kel [pu trq/rad]
0
-2
-8
K B = 1.2
K B = 1.72
Kel [pu trq/rad]
Kel [pu trq/rad]
3
2
40
45
Fig. 10. No PLL, no boost control; boost factor 1.2; β control (thin line);
SVR control (thick line)
Finally, the system is assumed have a medium boost
controller gain but with different synchronizing speed. It can
be seen from Fig. 11 that for frequencies lower than 11 Hz, a
fast PLL reduces the damping. Moreover, a fast PLL speed
pushes the critical undamping frequency rightward slightly as
[3]
Lennart Ängquist, “Synchronous Voltage Reversal Control of Thyristor
Controlled Series Capacitor”, Royal Institute of Technology, TRITAETS-2002-07, ISSN 1650-674X
Lennart Harnefors, Hans-Peter Nee, “Control of Variable-Speed AC
Drives”, Royal Institute of Technology, 1998
Lennart Ängquist, “RLS-based Phasor Estimator for POD”, ABB
Utilities AB (SE), 1JNR100001-406