Improving Pacific Intertie Stability Using Slatt Thyristor Controlled

Improving Pacific Intertie Stability
Using Slatt Thyristor Controlled Series Compensation
- Detailed summary submitted to IEEE/PES 2000 WM Panel Session, Singapore –
Vaithianathan Venkatasubramanian, Member, IEEE
School of Electrical Engineering and Computer Science
Washington State University
Pullman, WA 99164-2752
Carson W. Taylor, Fellow, IEEE
Transmission Operations and Planning, TOP/Ditt2
Bonneville Power Administration
Vancouver, WA 98666-0491
This paper discusses control design issues for the existing thyristor controlled series compensation (TCSC) device at Slatt substation on the Slatt–Buckley 500-kV transmission line owned by BPA. The controls were developed at Washington State University (WSU) in a project funded by Bonneville Power Administration (BPA). The project has been carried out in close collaboration between the WSU team and the BPA engineers. The controls are primarily aimed at providing fast transient stabilizing control during the first few swings of critical contingencies. Midterm small-signal stability enhancement is the secondary control objective.
A comprehensive overview of TCSC control schemes can be seen in [1]. Recent papers, [2] and [3], discuss the control design issues of TCSC installations in China and in
Brazil respectively.
Note that the BPA TCSC installation at Slatt was the first of its kind. Among other considerations, the site location on the Slatt–Buckley 500-kV line was motivated by its proximity to the thermal power plant at Boardman for conveniently testing the subsynchronous resonance issues [4]
(see Figure 1). The Slatt–Buckley line is one of several 500kV lines that feed into the Pacific AC intertie, that is, the
California-Oregon Intertie (COI) within a complex network of 500-kV transmission lines in the lower Columbia region.
Tradition-ally, TCSC impedance is varied for the purpose of controlling active power flow through the line in a suitable fashion. Owing to the existence of multiple power flow loops in the vicinity of the Slatt TCSC, a change in active power flow on the Slatt–Buckley line does not result in a corresponding change in active power flow on the critical
COI tie lines. Therefore, design of controls for the Slatt
TCSC, which provide transient stability support for severe contingencies affecting the COI tie lines, becomes a challenging problem.
While the effect of Slatt TCSC variation on COI active power flow is rather poor, we noted in our studies that the
Slatt TCSC can provide excellent dynamic reactive power support for the COI lines. Therefore, the TCSC control is formulated like a voltage control device by varying its impedance proportional to a voltage input. Short-term overload capability of the TCSC is utilized for deriving transient stability support during the first few swings after severe contingencies.
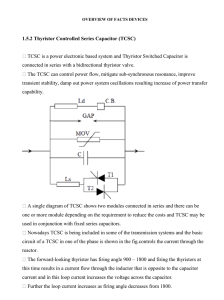
A detailed description of the technical features of Slatt
TCSC can be seen in [4]. Slatt TCSC consists of six identical modules per phase. Each module can operate either bypassed or inserted. Normal rating of the TCSC is 8 ohms at 2900 amperes which is equivalent to 202 MVAr. TCSC can be operated in either discrete mode or in continuous vernier mode.
In discrete control mode, the TCSC ohm order can be any one of the following: –1.2 (all caps off), 4, 8, 12, 16, 20, or 24 ohms. In continuous ohms operation, the TCSC order can be specified to be any value between –1.2 ohms and 24 ohms. There are nonlinear constraints on the ohm order depending on the current through TCSC and the time overload characteristic is shown in Figure 2. For instance, the ohm order of 24 ohms cannot be realized under typical operating conditions since the actual line current with TCSC at 24 ohms would be much higher than the permissible limit of 2000 amperes. The time-current overload capability of the
TCSC in Figure 2 has to be carefully accommodated in the stability control design to make sure that the design is realistic. At present, the TCSC is operated at a fixed value of either 8 or 12 ohms, and there is no dynamic control for the
TCSC.
The controls are developed in our work based on heuristic analysis of simulation results. All the simulations were carried out on detailed large-scale representations of the
WSCC western power system, which typically contain about
6500 buses and 900 generators. The simulations were mostly carried out using the Extended Transient Midterm Stability
Program (ETMSP) developed by Electric Power Research
Institute (EPRI) and the BPA power flow program. The EPRI small-signal stability program PEALS was also used for screening of bad data, and for studying the effects of controls on damping of the modes. User-defined detailed dynamic models were developed for the power electronic devices in
Pacific Northwest including the Slatt TCSC. Detailed models for the HVDC interties, developed previously by BPA engineers, were incorporated into the seasonal base cases of the entire WSCC system.
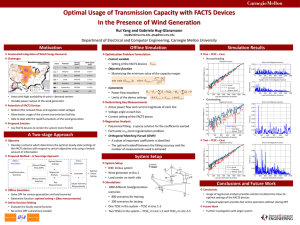
The proposed controls were tested for several contingencies including: 1) Simultaneous tripping of two
Palo Verde nuclear units in the southwest, which is a generation loss of about 2700 MW and, 2) Tripping of two
500-kV transmission lines from Paul to Allston that typically carry about 2200 MW. Seasonal WSCC base cases for 1997 summer peak, 1997 summer off-peak, 1998 Spring peak were used, together with validated cases for the WSCC disturbances on July 2, 1996 and August 10, 1996. The controls are expected to improve transient stability performance for specific critical contingencies for the various
seasonal cases as stated above. Moreover, they are required not to degrade the stability performance for all credible contingencies that were studied. The control benefits were measured by the “MW margin,” that is, the change in COI active power flow of the critically stable cases for specified severe contingencies with and without the proposed controls. from Ingledow (BC Hydro)
Monroe
Custer
Chief
Joseph
Grand
Coulee
N
Maple
Valley
Schultz
W
S
E
Raver
Vantage
Paul
Hanford
Allston
Little
Goose
Ashe
Keeler
Lower
Monumental
Lower
Granite
Pearl
Big Eddy John
Day
Ostrander
Marion Slatt
McNary
Coyote
Springs
Buckley
Boardman
Lane
Grizzly
Alvey
Fort Rock
Capt. Jack
Meridian to Olinda
Summer
Lake
Malin to Round Mt.
to Midpoint
DC to Sylmar
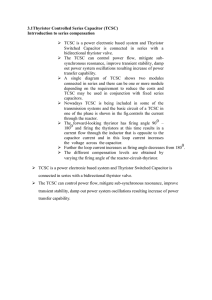
Figure 1. One-line diagram of the 500-kV transmission network in
Pacific Northwest.
Figure 2. Reactance capability of TCSC [4].
In a traditional sense, TCSC is quite effective for controlling the active power flow through a line.
Accordingly, traditional phase-lead/phase-lag designs were studied first using several inputs: 1) local 500-kV voltage, 2) local frequency, 3) Slatt–Buckley line current, 4) COI line current, and 5) COI active power flow. The common problem with all the controllers was that they did not provide robust transient support. When low control gains were used, the
TCSC controller did not have much effect on the intertie stability. On the other hand, when high gains were used, the controller could be tuned to provide good performance for a specific contingency. However, the high gains interacted negatively with inter-area modes for other contingencies, which is undesirable.
As stated earlier, while the active power flow through the
Slatt–Buckley line could be varied very well with the TCSC, this did not translate into controlling the COI power flow because of the topology of the parallel 500-kV transmission lines that feed the COI lines (see Figure 1). Therefore, an alternate approach of operating the TCSC as a dynamic reactive device based on 500-kV local voltage input, just like a SVC, was studied next.
Among local voltage-based Slatt TCSC controllers, we noted that a simple proportional control design provides excellent transient/damping support, whereas phase-lead and phase-lag designs may not be robust. In fact, the proportional control can be seen to provide consistent and robust transient/small-signal stability support for a variety of contingencies, and for several different seasonal operating conditions in the simulations. Therefore, the proportional
TCSC control based on local voltage input is recommended as an effective candidate for the TCSC controller.
Since the Slatt TCSC by design is a discrete control system (consisting of six 4-ohm capacitor banks), the proportional control can be implemented quite easily in the form of discrete control logic as shown in the next section.
The discrete controller provides “dead-bands” around different ohm settings so that the TCSC switching can be reduced drastically during system transients. The “dead-bands” in the discrete controller would also prevent the TCSC from interacting with local modes and small-amplitude interarea oscillations of distant areas such as other California or
Alberta/British Columbia modes.
To provide effective dynamic reactive support at Slatt
TCSC, a simple discrete controller was designed to vary the
Slatt TCSC capacitance proportional to the voltage input signal. The thermal overload capability of the device is programmed as part of the control design. Slatt voltage is nominally maintained around 542 kV in this design. The following voltage based controller has provided excellent transient support in our studies.
TCSC nominal => 8 Ω .
Slatt voltage > 545 kV => TCSC all caps off (-1.2 Ω ).
I
Slatt voltage > 540 kV => TCSC to 4 Ω .
Slatt voltage < 530 kV => TCSC to minimum of (16 Ω ,
L
based 10 sec. overload limit) for Timer < 6 sec.
=> TCSC to minimum of
(12 Ω , I
L
based 30 min. overload limit) for Timer > 6 sec.
Here, Timer counts TCSC operation at the 10 second overload limit (i.e., when voltage < 530 kV). During swings, whenever the Slatt voltage goes below 530 kV this controller
operates the TCSC at its 10-second capacitive limit for up to
6 seconds. After 6 seconds (that is, when 60% of overload capacity is reached), the TCSC is kept at 12 ohms or at the 30 minute overload limit. In our simulations, 12 ohms is well within the 30 minute overload limit of the TCSC. Also, the controller would switch out capacitors whenever the Slatt voltage swings above 545 kV as stated. Essentially, the controller provides dynamic reactive support to COI lines based on a local voltage input. We have also included an upper limit on the number of switchings over a specified time period to prevent the possibility of hunting between different controller settings.
When compared with fixed TCSC operation at 8 ohms, the MW margins from the proposed discrete controller for the
1997 WSCC summer peak case for the critical contingencies are stated below:
• Double Palo Verde: +200 MW, and
• Double Paul-Allston: +200 MW.
The MW margin for the critical contingency of the 1997
WSCC summer off-peak case is:
• Double Palo Verde: +100 MW.
The MW margin for the 1998 spring peak case is:
• Double Palo Verde: +100 MW.
Overall, the discrete Slatt controller provides excellent transient stability support to COI lines, and also provides significant damping enhancement to interarea oscillations in all our studies. As an enhancement, the TCSC could be designed to operate in a continuous vernier mode during nominal voltage conditions as a small-signal stabilizing controller. For instance, when Slatt voltage is between 540 kV and 545 kV in the design stated above, the TCSC impedance can be varied by 4 to 8 ohms about the nominal setting to provide small-signal damping support. Other control formulations, which utilize wide-area remote measurements, should also be pursued.
Acknowledgements. This work was supported by Bonneville
Power Administration under grants 97FC33945 and
98FC03310. The authors thank BPA engineers Dmitry
Kosterev, Ravi K. Aggarwal, and Bill Mittelstadt for helping us with the WSCC data and on the modeling of thyristor controls. The authors are also grateful to Karl W. Schneider, now at National Systems and Research Inc., for his immense help in carrying out the WSCC simulations while he was a graduate student at WSU.
References
[1] X. Zhou and J. Liang, “Overview of control schemes for
TCSC to enhance the stability of power systems”, IEE
Proc.-Gener. Trans. Distrib.
, Vol. 146, No. 2, March
1999, pp. 125–130.
[2] X. Zhou, et al., “Analysis and control of Yimin-Fengtun
500-kV TCSC system,” Electric Power Systems
Research (Elsevier), 46, 1998, pp. 157–168.
[3] C. Gama, “Brazilian north-south interconnection –
Control application and operating experience with a
TCSC,” Proceedings of the 1999 IEEE PES Summer
Meetings, Edmonton, Alberta, 1999.
[4] J. Urbanek, R. J. Piwko, E. V. Larsen, B. L. Damsky, J.
D. Eden, B. C. Furumasu, W. Mittelstadt, “Thyristor controlled series compensation prototype installation at the Slatt 500-kV substation,” IEEE Trans. Power
Delivery , Vol. 8, No. 3, July 1993, pp. 1460–1469.