Stability and Oscillations of Electrical Machines of Alternating Current
advertisement

Stability and Oscillations of Electrical
Machines of Alternating Current
G. A. Leonov ∗ S. M. Seledzhi ∗ E. P. Solovyeva ∗
A. M. Zaretskiy ∗
∗
Saint-Petersburg State University, Saint-Petersburg, Russia (e-mail:
leonov@math.spbu.ru).
Abstract: An induction machine with the squirrel cage rotor and a synchronous machine
with the four-pole rotor are considered and the new mathematical models of these machines
are developed. The analysis of steady-state and dynamic stability of the systems, describing
the electrical machines, is performed. The limit load problem is discussed and analytical and
numerical estimations of the limit load for considered electrical machines are obtained by the
equal-area method and the non-local reduction method. In the case of second method improved
estimates of the limit load in comparison to the estimates, obtained by the equal-area criterion,
are found.
Keywords: Synchronous motors, induction motors, limit load problem, equal-area criterion,
non-local reduction method.
1. INTRODUCTION
Stability is an important qualitative characteristic of an
electrical machine of alternating current, providing the
reliability of its work. In practice of operation of electrical
machines sudden disturbances occur, for example line
fault, changes of the external load, changes of supply
voltage, etc. In this case damage of the electrical machine
or even its failure requiring overhaul can arise. By this
reason the investigation of stability is one of the major
scientific and technological problems in the design of
electrical machines.
By stability of an electrical machine we mean the ability
of the machine to re-establish a steady-state mode after
disturbances of the initial mode. The process of pull into
synchronism after asynchronous start-up is also a property
of stability of the machine.
In 1931-1933 years Italian mathematician F. Tricomi
(1931, 1933) first applied the strict mathematical methods
for analysis of electrical machines. Equation of F. Tricomi
describes the dynamics of a synchronous machine in the
simplest two-dimensional idealization.
A very effective method for investigation of stability of
electrical machines became the second method of Lyapunov. This method was first used for stability analysis
of synchronous motors by A.A. Yanko-Trinitskii (1958).
The stability problems may be divided into two kinds:
steady-state, or static stability and transient, or dynamic
stability. The problem of dynamic stability of an electrical machune consists of not only checking whether the
machine maintain synchronism after given dynamic disturbances, but also finding the limit permissible disturbance, corresponding to the boundary of dynamic stability. Therefore, the problem of dynamic stability is closely
related to the limit load problem.
The urgency of the limit load problem has increased
significantly due to the large number of outages in the
modern world.
Numerical solution of the limit load problem for particular
values of the parameters is given in works of W. V. Lyon,
H. E. Edgerton (1930), as well as in monograph of J.J.
Stoker (1950). In the engineering practice to determine
the limit load it is used so called the equal-area method.
Mathematical setting of the limit load problem for electrical machines and the methods of its solution are considered in J.M. Bryant, E.W. Johnson (1935); A. Pen-tung
Sah (1946); F. A. Annett (1950); G. C. Blalock (1950);
A.A. Yanko-Trinitskii (1958); U.D. Caprio (1986); E. A.
Barbashin, V.A. Tabueva (1969); H.-Ch. Chang, M.H.
Wang (1992); R. H. Miller, J. H. Malinowski (1994); S. A.
Nasar, F. C. Trutt (1999); G.A. Leonov, N.V. Kondrat’eva,
F.F. Rodyukov, A.I. Shepeljavyi (2001); J. C. Das (2002);
N. Bianchi (2005); G.A. Leonov (2006); C. L. Wadhwa
(2006); R.R. Lawrence (2007]); J.D. Glover, M.S. Sarma,
T.J. Overbye (2008), where a mathematical justification
of ”equal-area method” is given and the estimates of limit
loads are obtained. In these works the different mathematical models of electrical machines and the Lyapunov
function of the type: ”quadratic form plus an integral of
nonlinearity” are used.
The complexity of constructing Lyapunov functions for
multi-dimensional models of dynamical systems has led
to the necessity for the development of various generalizations of the second Lyapunov method. In G.A. Leonov
(2001) and in the monograph V.A. Yakubovich, G.A.
Leonov, A.Kh. Gelig (2004) for investigating the stability
of electric motors, in addition to typical functions of Lyapunov, the functions, involving the information on solutions of equation of comparison, namely Tricomi equation,
are used. These Lyapunov-type functions constitute the
essence of tne non-local reduction method.
Further the method of non-local reduction has been developed in G.A. Leonov (2006); G.A. Leonov, N.V. Kondrat’eva (2009), where the dynamic stability and oscillations of differential equations of electrical machines are
studied.
2. MATHEMATICAL MODELLING OF ELECTRICAL
MACHINES
Electrical machines obey the inversability principle and,
therefore, they can operate as either generator or motor.
The principle of inversability allows one to conclude that
mathematical models of electrical machines, operating in
the mode of electric energy generation, preserve the same
structure as electric motors. In what follows we consider
synchronous and induction machines operating as a motor.
It is reasonable that any mathematical model of an electrical machine is a certain idealization. In the present paper
the basic assumption, according to which the dynamics of
an electrical motor is determined by the dynamics of the
rotor, is that electromagnetic processes in windings of the
rotor do not influence on the parameters of the rotating
magnetic field, i.e. the magnetic field vector is constant in
magnitude and rotates with constant speed. Such rotating
magnetic field generated by alternate current in stationary windings of the stator of an electrical machine was
invented by N. Tesla and G. Ferraris in 1888. Till now
this phenomenon is a base of construction of alternating
current machines: the synchronous and asynchronous ones.
All the equations derived here are obtained by means of the
general approach: introducing the system of coordinates
rigidly connected to rotating magnetic field and considering the motion of electromechanical models of electrical
motors in this system of coordinates.
2.1 Mathematical Model of Induction Motor with the Cage
Rotor
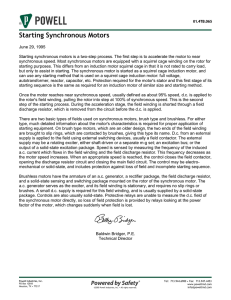
Let us study the cage rotor of induction motors consisting
of n bars and two end rings (Fig. 1). The whole structure
looks like a squirrel cage, so the rotor is also called squirrel
cage rotor.
dik
2kπ
+ R ik = l0 lB cos(θ +
)θ̇, k = 1..n,
dt
n
n
X
2kπ
)ik (t) − M,
J θ̈(t) = l0 lB
cos(θ(t) +
n
L
(1)
k=1
where ik – current in k bar; R – resistance of the bar; L
– inductance of the bar; l, l0 – radius and length of the
squirrel cage respectively; θ – angle between the radius
vector of the bar with current in and the magnetic field
vector B; J – the moment of inertia of rotor; M – the
moment of resistance (so called load torque).
Let transform (1) to more convenient form for further
study. Using a nonsingular change of coordinates
θ 7→ −θ,
s = θ̇,
x=
n
2L X
2kπ
)ik ,
sin(θ −
nl0 lB
n
k=1
n
2L X
2kπ
y=
)ik ,
cos(θ −
nl0 lB
n
k=1
zk =
m
X
π
i(k+j) mod n − cot( )ik ,
n
j=−m
k = 2..n − 1.
system (1) takes the following form
where
θ̇ = s,
ṡ = ay + γ,
ẋ = −cx + ys,
ẏ = −cy − xs − s,
żk = −czk ,
k = 2..n − 1.
a=
n(l0 lB)2
,
2JL
γ=
M
,
J
c=
(2)
R
.
L
In system (2) the variables x, y, zk determine electrical
quantities in the rotor bars, the variable s is slip speed.
Note that the equations żk = −czk can be easily integrated
and equations (2) except the first do not depend on θ,
hence, it is sufficient to consider the system
ṡ = ay + γ,
ẋ = −cx + ys,
(3)
ẏ = −cy − xs − s.
On the basis of the developed mathematical model steadystate and dynamic stability of an induction motor with the
cage rotor are studied.
2.2 Mathematical Model of Synchronous Motor with the
Four-Pole Rotor
Fig. 1. Cage rotor of induction motor
We consider motion of the cage rotor in the rotating
coordinate system, rigidly connected with the magnetic
field vector B. By first and second Kirchhoffs laws for
electrical circuit of the cage rotor and the equation of
the moments of forces we obtain the following system
of equations, which describes the behaviour of cage rotor
induction motor
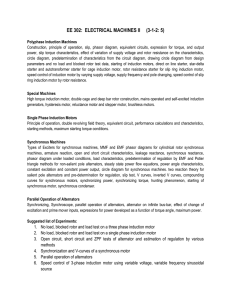
The electromechanical model of a synchronous motor with
the salient-pole rotor (Fig.2) is studied. We consider fourpole electromechanical model with damper winding. The
damper winding is a short-circuited winding similar to the
squirrel cage winding of an induction motor rotor.
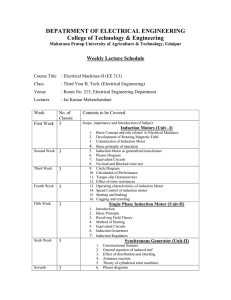
A scheme of four-pole model of rotor with damper winding
is shown in Fig.3. This scheme consists of two orthogonal
pairs of parallel turns of field winding with one excitation
current i and damper winding with the currents ik , k =
1...n.
θ̇ = s,
ṡ = −µs − ax sin θ − b sin θ + γ,
ẋ = −cx − ds sin θ.
(5)
Here
√
√
√
R0
2 2n0 S0 B
2 2n0 S0 Be
2 2n0 S0 B
,c =
,d =
,
,b =
a=
J
JR0
L0
L0
µ=
Fig. 2. Salient-pole rotor of synchronous motor
n(SB)2
8JR .
3. THE STATEMENT OF LIMIT LOAD PROBLEM
FOR ELECTRICAL MACHINES
A typical situation for an electrical machine is as follows:
the machine is started without load, then in transient
process it is pulled in synchronism and only after that
a load-on occurs. In this case the limit load problem is to
find for what loads, after transient process, the electrical
machine is pulled in a new synchronous operating mode.
Fig. 3. Schematic of four-pole rotor. Field winding with
current i and damper winding with currents ik are
shown
As before, we consider motion of windings in the rotating
coordinate system rigidly connected to the magnetic field
vector. We use the previous denotations of the squirrel
cage winding for parameters of the damper windings. Let
us introduce the following parameters of the field winding:
L0 is inductance, R0 is resistance, S0 is area of separate
turn of the field winding, m is the numbers of turns in the
field winding. Parameters J, M have the same meaning as
before.
By first and second Kirchhoffs laws and the equation of
the moments of forces we get the system of equations
di
L0 + R0 i = 2n0 S0 B(cos θ + sin θ)θ̇ + e,
dt
dik
SB
2πk
L
+ Rik =
cos(θ +
)θ̇, k = 1..n,
dt
2
n
(4)
J θ̈ = 2n0 S0 B(cos θ + sin θ)i+
n
2πk
SB X
)ik − M.
cos(θ +
+
2
n
In the work the limit load problem for induction motors with the cage rotor and synchronous motors with
the quadrupole rotor is considered. Thus, the behaviour
of these electrical motors may be described by the autonomous system of the form
ż = f (z), z ∈ Rn .
In the work global stability of electrical motors under noload condition is proved, so it is assumed that the motor
operates in a synchronous mode. Let this operating mode
correspond to the solution of the system z = z0 .
Further at time t = τ the instantaneous load-on occurs.
Thus, for t > τ the moment of the external load is not
already zero. Hence, the operating mode of the motor
changes, that is a new synchronous operating mode of the
motor under load condition corresponds to the solution
of the system z = z∗ . Thus, a mathematical setting of
the limit load problem is the following: to find conditions,
under which the solution z = z(t) with the initial data
z = z0 is contained in the domain of attraction of the
stationary solution z = z∗ . The latter means that the
following relations
lim z(t) = z∗ .
t→+∞
must be satisfied.
It follows that the limit load problem for an induction
motor is reduced to the problem of finding the region of
attraction of the stable equilibrium point.
k=1
This system describes the behaviour of the synchronous
motor with the four-pole rotor.
4. LIMIT LOAD ESTIMATIONS
Let us neglect inductance of the damping winding, i.e.
assume L = 0. Using nonsingular transformation of coordinates
π
θ 7→ −θ − ,
4
e
,
x=i−
R0
and taking into account
π
2πk
SB
cos(θ + −
)θ̇, k = 1..n,
ik =
2R
4
n
system (4) is reduced to the third order system
Consider first the limit load problem for system (3) of
equations of induction motor with the cage rotor.
The equilibrium points of system (3) under condition
γ > a2 are points: the asymptotically stable equilibrium
point
γ
γs0
, y = − , s = s0 < c,
x=−
ac
a
which corresponds to an operating mode of induction
motor, and the unstable equilibrium point
γs0
γ
x=−
, y = − , s = s1 > c,
ac
a
which represents a physically unrealizable mode. Here
s0 , s1 are roots of the equation
acs
= γ.
s2 + c2
Suppose, that to synchronous operating mode of induction
motor under no-load condition corresponds an unique
asymptotically stable equilibrium point of system (3) in
the case γ = 0: s = 0, y = 0, x = 0. Further at time
τ , the instantaneous load-on γ occurs. Thus, for solving
the limit load problem we need to find conditions, under
which the solution x(t), y(t), s(t) with the initial data s =
0, x = 0, y = 0 is contained in the domain of attraction of
γ
0
the stationary solution x = − γs
ac , y = − a , s = s0 < c:
γs0
γ
lim s(t) = s0 , lim x(t) = −
, lim y(t) = − .
t→+∞
t→+∞
ac t→+∞
a
(6)
The estimate of the limit load for induction motors with
the cage rotor can be obtained by
Theorem 1. If a quantity γ satisfies the inequalities
a
0 < γ < min{ , 2c2 }
(7)
2
and
Zs1
γ
2 (− s2 + as − cγ) ds ≥ γ 2 ,
(8)
c
0
then γ is the permissible load.
Ideas of the equal-area method are used during the proof of
Theorem 1. The estimate (8) can be improved by the nonlocal reduction method. Before this we transform system
(3) to more convenient form for further study.
The change of variables
γ
s
ac
transforms the system (3) into the form
ṡ = η,
η̇ = −cη + azs − ψ(s),
(9)
1
γ
ż = −cz − sη −
η
a
ac
and maps the initial data of system (3) into the initial
data s = 0, η = γ, z = 0 of the new system. Here
ψ(s) = − γc s2 + as − cγ.
η = ay + γ,
z = −x −
Under the condition 0 < γ < a/2 the stationary set of
system (9) consists of two points: the point s = s0 , η =
0, z = 0 is asymptotically stable and the point s = s1 , η =
0, z = 0 is unstable, where s0 and s1 are zeros of the
function ψ(s)
p
p
c a − a2 − 4γ 2
c a + a2 − 4γ 2
s0 =
, s1 =
.
2γ
2γ
Theorem 2. Suppose that
Zs1
(10)
2 ψ(s)ds + Γ2 s21 ≥ γ 2 ,
0
is satisfied, where
Γ = 2 max λ c − λ −
λ∈(0,c)
γ2
4c2 (c − λ)
1/2
.
Then the solution of system (9) with the initial data
s(0) = 0, η(0) = γ, z(0) = 0 satisfies the relations
lim s(t) = s0 , lim η(t) = 0, lim z(t) = 0.
(11)
t→+∞
t→+∞
t→+∞
Proof. Consider the equation
dF
F
= −ΓF − ψ(s),
ds
with initial data F (s1 ) = 0. In E. A. Barbashin, V.A.
Tabueva (1969)it is shown that its solution F (s) in the
point zero can be estimate by
Zs1
1
F (0) > (2 ψ(s)ds + Γ2 s21 ) 2 .
0
Thus, if condition (10) is fulfilled, then the solution F (s)
satisfies the condition
F (0) > γ.
(12)
Let us consider the function
a2
1
1
W (s, η, z) = z 2 + η 2 − F 2 (s).
2
2
2
For W (s, η, z) on the solutions of system (9) we have
Ẇ (s, η, z) + 2λW (s, η, z) ≤ 0
(13)
Then two cases are possible: either there exists a point
s2 < 0 such that F (s2 ) = 0 and F (s) > 0 is fulfilled for all
s ∈ (s2 , s1 ), or F (s) > 0 for all s ∈ (−∞, s1 ).
In the first case let us define Ω as follows
Ω = W (s, η, z) < 0, s ∈ [s2 , s1 ] .
In virtue of (13) the set Ω is positively invariant. From
the properties of F (s): F (s) > 0 for all s ∈ (s2 , s1 ) and
F (s1 ) = F (s2 ) = 0 it follows the boundedness of the set
Ω.
In the second case the function W (s, η, z) induces a positive invariant cone
Ω1 = {W (s, η, z) < 0, s ∈ (−∞, s1 ]}.
Consider the function V (s, η, z)
a2
1
V (s, η, z) = z 2 + η 2 +
2
2
Zs
ψ(s)ds.
s1
For V (s, η, z) on the solutions of system (9) we have
aγ
ηz − cη 2 ≤ 0.
V̇ (s, η, z) = −ca2 z 2 −
c
Thus, the function V (s, η, z) also induces a positive invariant cone
Ω2 = {V (s, η, z) < C, s ∈ [s3 , +∞)}.
Here s3 is a solution of the equation
Zs1
ψ(s)ds = C x < s1
x
and constant C > 14 F 2 (0) is chosen so that s3 < 0.
Consider the bounded set
Ω∗ = Ω1 ∩ Ω2 .
Since Ω1 and Ω2 are positively invariant, then Ω∗ is also
the positively invariant set.
Now we show that under the conditions of the theorem the
positively invariant set Ω and Ω∗ contain the point (0, γ, 0)
and (s0 , 0, 0).
Under the condition (12) the following inequality
1
1
W (0, γ, 0) = γ 2 − F 2 (0) < 0
2
2
is fullfilled. It follows that
(0, γ, 0)T ∈ Ω, (0, γ, 0)T ∈ Ω1 .
Since s0 ∈ (0, s1 ) and F (s) > 0 for all s ∈ (s2 , s1 ), then
γ = 0 corresponds to the synchronous operating mode of
the synchronous motor under no-load condition. Further
at time τ , the instantaneous load-on γ occurs. Thus, for
solution of the limit load problem we need to obtain
conditions, under which the solution θ(t), s(t), x(t) with
the initial data θ = 0, s = 0, x = 0 is contained in the
domain of attraction of the stationary solution θ = θ0 , s =
0, x = 0:
lim θ(t) = θ0 , lim s(t) = 0, lim x(t) = 0.
(14)
t→+∞
t→+∞
t→+∞
The estimate of the limit load for synchronous motors with
(s0 , 0, 0)T ∈ Ω, (s0 , 0, 0)T ∈ Ω1 .
the four-pole rotor can be obtained by
It remains to show that the set Ω2 contain these points.
Theorem 3. If a quantity γ satisfies the inequality
Since
s
1
Z
Z0
1 2 1 2
1 2
1 2
V (0, γ, 0) = γ − ψ(s)ds < γ − F (0) < F (0) < C
(sin θ − γ)dθ < 0,
(15)
2
2
4
4
0
and
V (s0 , 0, 0) =
θ1
Zs0
s1
then
(0, γ, 0)T ∈ Ω2 ,
=−
Zs1
then γ is the permissible load.
< C,
s0
(s0 , 0, 0)T ∈ Ω2 .
By the function V (s, η, z) it can be proved that system
(9) is dichotomic. Thus, it follows that relations (11) are
satisfied.
From analytical estimates (7), (8) and (10), we obtain
the numerical estimates of the limit load for an induction
motor, presented in Fig. 4.
Theorem 3 is a justification of the widely used in engineering practice equal-area criterion. The estimate (15) can be
improved by the non-local reduction method.
Theorem 4. If a quantity γ satisfies the inequality
Zθ1 b sin θ − γ dθ ≥ −Cθ12 ,
(16)
2
0
where
C=
(
2µ2 ,
4a(µ − a),
then γ is the permissible load.
µ < 2a,
µ ≥ 2a.
Proof. Let us consider the equation
p
θ̈ + 2 λ(µ − λ)θ̇ + (sin θ − γ) = 0,
where the parameter λ satisfies the inequalities
0 < λ < min(µ, a).
(17)
(18)
Suppose that for solution of the equation (17) with the
initial data θ = 0, θ̇ = 0, condition
θ(t) ≤ θ1 , ∀t ≥ 0.
(19)
is satisfied.
Fig. 4. Limit load estimates for induction motor. Area 1 is
obtained by the equal-area criterion and area 1+2 is
obtained by the non-local reduction method
Consider further the limit load problem for the system
(5) of equations of synchronous motor with the four-pole
rotor.
The equilibrium points of system (5) under condition γ < b
are points: the asymptotically stable equilibrium points
θ = θ0 + 2πk (k ∈ Z), s = 0, x = 0,
which correspond to operating modes of synchronous motor, and the unstable equilibrium points
θ = θ1 + 2πk (k ∈ Z), s = 0, x = 0,
which represent physically unrealizable modes. Here θ0 =
arcsin γb , θ1 = π − arcsin γb .
Suppose, that the asymptotically stable equilibrium point
θ(0) = 0, s(0) = 0, x(0) = 0 of system (5) in the case
In E. A. Barbashin, V.A. Tabueva (1969) it is shown that
in virtue of (19) equation (17) and
p
dF
F
(20)
= −2 λ(µ − λ)F − (ϕ(θ) − γ),
dθ
are equivalent equations. Equation (20) has either solutions Fk (θ) such that
Fk (θ2k+1 ) = 0,
Fk (θ) 6= 0,
∀θ 6= θ2k+1
lim Fk (θ) = −∞,
lim Fk (θ) = +∞, k ∈ Z (21)
θ→+∞
θ→−∞
or solution F∗ (θ) defined on the interval (θ, θ1 ), θ < θ0
and such that
F∗ (θ) = F∗ (θ1 ) = 0, F∗ (θ) > 0, ∀θ ∈ (θ, θ1 ). (22)
Introduce the functions
c 2
x +
2d
c 2
x +
W∗ (θ, s, x) =
2d
Wk (θ, s, x) =
1 2
s −
2
1 2
s −
2
1 2
F (θ),
2 k
1 2
F (θ).
2 ∗
The relations
and
Ẇk (θ, s, x) − 2λWk (θ, s, x) ≤ 0
Ẇ∗ (θ, s, x) − 2λW∗ (θ, s, x) ≤ 0
imply a positive invariance of the sets
Ωk = Wk (θ, s, x) ≤ 0
and
Ω∗ = W∗ (θ, s, x) ≤ 0, θ ∈ (θ, θ1 ).
Let us consider the set
Ω = Ω0 ∩ Ω−1 , θ ∈ (θ1 − 2π, θ1 ).
The sets Ω and Ω∗ are bounded and involve the points:
the unique equilibrium point (θ0 , 0, 0) and (0, 0, 0). By
the function
Zθ
c 2 1 2
(23)
x + s + (sin(ζ) − γ)dζ.
V (θ, s, x) =
2d
2
θ1
it can be proved that system (5) is dichotomic. Thus, it
follows that relations (14) are satisfied.
It is known from E. A. Barbashin, V.A. Tabueva (1969)
that condition (19) is satisfied if
p
υ(λ) = λ(µ − λ) > 0
and
Zθ1
2
4λ(µ − λ)θ1 + 2 (ϕ(θ) − γ)dθ ≥ 0.
0
The best estimate is achieved at the maximum of the
function υ(λ). Taking into account (18), if µ < 2a the
maximum of υ(λ) is achieved at λ = 12 µ, otherwise, at
λ = a.
From analytical estimates (15) and (16), we obtain the
numerical estimates of the limit load for a synchronoud
motor, presented in Fig. 5.
Fig. 5. Limit load estimates for synchronous motor. Area
1 is obtained by the equal-area criterion and area 1+2
is obtained by the non-local reduction method
REFERENCES
A. Pen-tung Sah (1946). Fundamentals of alternatingcurrent machines. McGraw-Hill induction motor abook
company, inc.
A.A. Yanko-Trinitskii (1958). New method for analysis
of operation of synchronous motor for jump-like loads.
M.-L.: GEI.
C. L. Wadhwa (2006). Electrical power systems. New Age
International.
E. A. Barbashin, V.A. Tabueva (1969). Dynamical systems
with cylindric phase space. M.: Nauka.
F. A. Annett (1950). Electrical machinery: a practical study course on installation, operation and maintenance. McGraw-Hill.
F. Tricomi (1931). Sur une equation differetielle de
l’electrotechnique. C.R. Acad. Sci. Paris. T. 193.
F. Tricomi (1933). Integrazion di unequazione differenziale
presentatasi in electrotechnica. Annali della R. Shcuola
Normale Superiore di Pisa. Vol. 2, 2.
G. C. Blalock (1950). Principles of electrical engineering:theory and practice. McGraw-Hill.
G.A. Leonov (2001). Mathematical problems of control
theory. World Scientific.
G.A. Leonov (2006). Phase synchronization. theory and
application. 10, 47–86.
G.A. Leonov, N.V. Kondrat’eva (2009). Stability analysis
of electric alternating current machines. SPb: Isd. St.
Petersburg. univ.
G.A. Leonov, N.V. Kondrat’eva, F.F. Rodyukov, A.I.
Shepeljavyi (2001). Nonlocal analysis of differential
equations of induction motors. Technische mechanik,
75–86.
H.-Ch. Chang, M.H. Wang (1992). Another version of
the extended equal area criterion approach to transient
stability analysis of the taipower system. 25(2), 111–120.
J. C. Das (2002). Power system analysis: short-circuit load
flow and harmonics. CRC Press.
J.D. Glover, M.S. Sarma, T.J. Overbye (2008). Power
system analysis and design. Cengage Learning.
J.J. Stoker (1950). Nonlinear vibrations. Interscience. New
York.
J.M. Bryant, E.W. Johnson (1935). Alternating current
machinery. McGraw-Hill book company, inc.
N. Bianchi (2005). Electrical machine analysis using finite
elements. CRC Press.
R. H. Miller, J. H. Malinowski (1994). Power system
operation. McGraw-Hill Professional.
R.R. Lawrence (2007]). Principles of Alternating Currents.
READ BOOKS.
S. A. Nasar, F. C. Trutt (1999). Electric power systems.
CRC Press.
U.D. Caprio (1986). Lyapunov stability analysis of a synchronous machine with damping fluxes part i: Extension
of the equal-areas stability criterion. 8(4), 225–235.
V.A. Yakubovich, G.A. Leonov, A.Kh. Gelig (2004). Stability of Stationary Sets in Control Systems with Discontinuous Nonlinearities. Singapore: World Scientific.
W. V. Lyon, H. E. Edgerton (1930). Transient torque –
angle characteristics of synchronous mashines. Trans.
Amer. Inst. Electr. Eng.