Resolver-to-Digital Module
advertisement

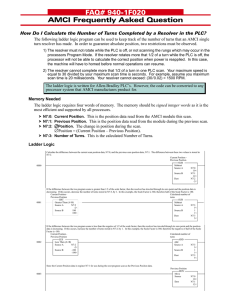
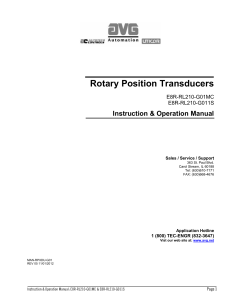
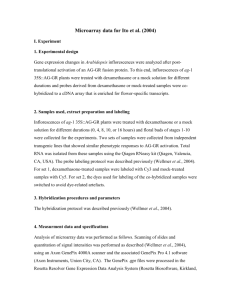
Resolver-to-Digital Module Annotation: Resolver technology has been used in the industrial environment for many years. This technology still provides the best angular position transducer available in terms of ruggedness, reliability and resolution. Re− solver/Digital Module provides excitation to the resolver and translates the returned angular analogue information into a digital form for motion control applications using motors with resolver feedback. The digital an− gular position output information is available in two forms: As a serial bi− nary output, providing the absolute position, and as two quadrature sig− nals A and B, and the Z (zero) pulse, emulating an incremental encoder. Author: Petr Kadaník page 2/17 Resolver−to−Digital Module Content INTRODUCTION 3 WHAT IS A RESOLVER? 3 RESOLVER SIGNAL FORMAT 4 BRUSHLESS RESOLVERS 5 RESOLVER-TO-DIGITAL CONVERSION 6 TECHNICAL SUMMARY 8 KEY FEATURES 8 POWER SUPPLY 8 R/D INTEGRATED CIRCUITS 9 AD2S90: R/D CONVERTER 10 AD2S99: PROGRAMMABLE OSCILLATOR 11 OSCILLATOR OUTPUT STAGE 12 I/O CONNECTORS 12 CONCLUSIONS 16 REFERENCES 17 APPENDIX 17 Gerstner Lab Prague, Jan−2003 Resolver−to−Digital Module page 3/17 Introduction Flexible motor control is unthinkable without precise information about the position of the shaft. For this purpose, different types of shaft angle sensors are used, often built into the driving mo− tors. On the basis of their physical design, these angular transducers can be classified into two main groups: • Optical: A phototransistor or other light−sensitive electronic device counts lines on a transparent disk mounted to the rotating shaft. The most common of these devices are incremental and absolute encoders. • Inductive: Built like small electrical motors, where inductive coupling between a rotating part (the rotor) and a stationary part (the stator) generates signals indicating shaft position. Resolvers and synchros are the most common devices. Optical transducers, especially incremental encoders, have found wide application because their digital outputs can be easily processed by both discrete logic and microprocessors. Nevertheless, optical transducers have a number of characteristics that make them less than optimal for many applications. The built−in semiconductors used to amplify and format the digital output signals are sensitive to temperature and the LED light sources commonly employed are susceptible to aging. Furthermore, applications that require an absolute output signal require absolute encoders, which are much more complicated and therefore expensive. From a purely practical standpoint, the precise concentricity between the encoder disk and the sensors required to maintain accuracy as well as the mere presence of optical devices in an industrial environment dictate that a fully enclosed device with bearings and shaft be used in all but the crudest applications. Since encoders are typically connected to a shaft having its own bearings, the user must pay for the second set of high−quality bearings in the transducer as well as a flexible coupling to connect the two shafts. In many applications, especially brushless servo− motor commutation or flux vector control of AC induction motors, the additional length of the optical encoder’s shaft, bearings, and coupling is too great and the optical encoder cannot be used. On the other hand, inductive transducers such as resolvers are intrinsically absolute and require no semiconductors on the transducer itself − the raw output signal can be transmitted over dis− tances of more than 100 meters. In addition, since they consist primarily of copper and steel, re− solvers are virtually insensitive to temperature over a wide range. Because no sensitive electronics or optics are employed, resolvers are often supplied in an unhoused (also called frameless or pancake) configuration and can be mounted directly to the shaft whose position is to be mea− sured. Cost and length savings are realized by the user since no shaft−to−shaft coupling or extra bearings are required. What is a resolver? A resolver is a position sensor or transducer which measures the instantaneous angular position of the rotating shaft to which it is attached. Resolvers and their close cousins, synchros, have been in use since before World War II in military applications such as measuring and controlling the angle of gun turrets on tanks and warships. Resolvers are typically built like small motors with a rotor Gerstner Lab Prague, Jan−2003 page 4/17 Resolver−to−Digital Module (attached to the shaft whose position is to be measured), and a stator (stationary part) which pro− duces the output signals. The word resolver is a generic term for such devices derived from the fact that at their most basic level they operate by resolving the mechanical angle of their rotor into its orthogonal or Cartesian (X and Y) components. From a geometric perspective, the relationship between the rotor angle (θ) and its X and Y components is that of a right triangle: Fig.1: Resolving an Angle into its Components Fundamentally, then, all resolvers produce signals proportional to the sine and cosine of their rotor angle. Since every angle has a unique combination of sine and cosine values, a resolver provides absolute position information within one revolution (360°) of its rotor. This absolute (as opposed to incremental) position capability is one of the resolver’s main advantages over in− cremental encoders. Electrically, a traditional resolver, is a transformer in which the coupling between the primary and the secondaries varies as the sine and cosine of the rotor angle. A resolver has its primary on the rotor and its secondaries in the stator (necessitating brushes and slip rings or a rotating trans− former to couple signals into the primary). Like all transformers, a resolver requires an AC carrier or reference signal (sometimes also called the excitation) to be applied to its primary. The amplitude of this reference signal is then modu− lated by the sine and cosine of the rotor angle to produce the output signals on the two seconda− ries. For best performance, the reference signal should be a sine wave. In any transformer, there is a value which relates the output voltage produced by the secondary to that fed into the primary. For resolvers, this quantity is called the transformation ratio or TR and is specified at the point of maximum coupling between primary and secondary. For industrial resolvers, the defacto standard transformation ratio is 0.5, which means that the maximum voltage produced by either secondary is half the amplitude of the reference signal. If we define the reference voltage VR , then the voltages on the secondaries are given by the follo− wing equations: Sine Secondary: VS = VR TR sinθ Cosine Secondary: VC = VR TR cosθ where θ is the mechanical angle of the rotor. Resolver Signal Format If we excite the primary (VR) with the recommended sinusoidal reference signal as shown below, the secondary voltages are also sinusoidal at the same frequency and nominally in phase with the reference. Their amplitude is proportional to the amplitude of the reference, the transformation ratio TR, and the sine or cosine of the mechanical angle of the rotor. While it is helpful to know how the resolver signals appear as functions of time since that is what one sees when one looks at them with an oscilloscope, it is often more convenient to work with the Gerstner Lab Prague, Jan−2003 page 5/17 Resolver−to−Digital Module envelope (amplitude at the reference frequency) of the signals with respect to rotor position. If the rotor of the resolver is turned at a rate such that it makes one complete revolution in the time of 10 cycles of the excitation frequency (speeds this high are very difficult and cause other problems in practice, but are useful for understanding), the envelope of the secondary signals can be clearly seen. Shown below (Fig.2) is the envelope of the sine secondary signal with respect to rotor posi− tion. Fig.2: Modulation Envelope of Sine Secondary Signal The process of removing the carrier signal − leaving just the envelope − is called demodulation and is performed by the Resolver−to−Digital (R/D) converter. The demodulated sine and cosine resolver signals are shown in Fig.3. Fig.3: Demodulated Resolver Secondary Signals Brushless Resolvers The traditional brushless resolver consists of a wound rotor and stator as shown below (Fig.4). The windings on the rotor generate an AC magnetic field with a sinusoidal distribution. This field induces voltages in the two stator windings whose amplitudes are dependent on the rotational angle of the rotor. To provide sine and cosine signals, the two secondaries are wound in space quadrature (90 physical degrees apart) in the stator. Electrical energy has to be supplied to the rotor to generate its AC magnetic field. However, as the rotor must be able to rotate freely it is not possible to use wires. The use of slip rings is also not recommended because they are subject to wear, generate signal noise, and compromise the mechanical ruggedness of the resolver. The brushless resolvers therefore use a rotary coupling transformer to transfer energy from the stator to the rotor. The primary of this rotary transformer is built into the stator. The secondary is mounted on the rotor and connected directly to the resolver primary. Because of the energy lost in energizing this two−stage transformer (basically two transformers in series), many turns of wire are required to generate usable output signal amplitudes. The large number of turns means that the Gerstner Lab Prague, Jan−2003 page 6/17 Resolver−to−Digital Module resolver is a relatively high−impedance device, limiting its use at high excitation frequencies or rotational speeds. Because the resolver has a wound rotor, its maximum speed is limited since the windings tend to fly out of the rotor due to centrifugal force. Typical maximum speeds are 10,000 RPM or less. Fig.4: Traditional brushless resolver with wound rotor and rotary transformer Resolver−to−Digital Conversion While resolvers were originally developed for military and aerospace applications, in recent years industrial automation has shown more interest in these rugged and precise absolute position transducers. Nevertheless, the expansion of the use of resolvers was often limited by the fact that the signal conversion required cumbersome circuitry and automated resolver production was diffi− cult. Now, however, inexpensive and easy−to−implement monolithic ICs that perform complete resolver−to−digital conversion are available. These R/D converters give an absolute or incremental output with a resolution of up to 65,536 counts per revolution. A typical two−chip solution is shown in Fig.5. Fig.5: Simple R/D conversion using two monolythic ICs The resolver signals are low bandwidth amplitude−modulated sine waves. Since these sine wave signals contain only a single frequency component rather than the virtually infinite frequency spec− trum of an optical encoder’s square wave signals, they are inherently much more immune to the high−frequency noise generated by PWM motor drives and other industrial machinery. Gerstner Lab Prague, Jan−2003 page 7/17 Resolver−to−Digital Module The resolver−to−digital converter performs two basic functions: demodulation of the resolver for− mat signals to remove the carrier, and angle determination to provide a digital representation of the rotor angle. The most popular method of performing these functions is called ratiometric tracking conversion. Since the resolver secondary signals represent the sine and cosine of the ro− tor angle, the ratio of the signal amplitudes is the tangent of the rotor angle. Thus the rotor angle, θ, is the arc tangent of the sine signal divided by the cosine signal: θ = arctan V sinθ = arctan S VC cosθ The ratiometric tracking converter performs an implicit arc tangent calculation on the ratio of the resolver signals by forcing a counter to track the position of the resolver. This implicit arc tangent calculation is based on the trigonometric identity sin(θ − δ ) ≡ sinθ cos δ − cosθ sinδ . This equation says that the sine of the difference between two angles can be calculated by cross multiplying the sine and cosine of the two angles and subtracting the results. Further, as long as the difference between the two angles is relatively small (δ=θ±30°), the approximation sin(θ − δ ) ≅ θ − δ may also be used, further simplifying the equation. Thus, if the two angles are within 30° of each other, the difference between the angles can be calculated using the cross mul− tiplication shown above. In the R/D converter, this equation is implemented using multiplying D/A converters to multiply the resolver signals (proportional to sinθ and cosθ) by the cosine and sine of the digital angle, δ, which is the output of the converter. The results are subtracted, demodulated by multiplying by the reference signal, and filtered to give a DC signal proportional to the difference or error between the resolver angle, θ, and the digital angle, δ. The digital angle, δ, stored in the counter, is then incremented or decremented using a voltage controlled oscillator until this error is zero, at which point δ=θ (the digital angle output of the converter is equal to the resolver angle). This incrementing and decrementing of the digital angle, δ, causes it to track the resolver angle, θ, hence the name of this type of converter. Gerstner Lab Prague, Jan−2003 page 8/17 Resolver−to−Digital Module Technical Summary Resolver−to−digital interface module offers an effective solution for motion control applications using motors with resolver feedback. It provides the resolver excitation and translates the returned angular analogue information into a digital form. The digital angular position output information is available in two forms: • As a serial binary output, providing the absolute position. This output is available on the serial peripheral connector (SPI) pins. The absolute position has 12 bits resolution pro− viding 4096 values per rotation. • As 2 quadrature signals A and B, and a Z (zero) pulse, emulating an incremental en− coder. These signals are available on the quadrature encoder connector pins. The encoder emulated outputs continuously produce signals equivalent to a 1024−line encoder. Key features • • • • • 12−bit serial absolute position 4x1024−lines incremental encoder emulation Differential inputs for resolver signals Internal oscillator providing sinusoidal excitation with an arbitrary frequency 2−20kHz External power supply 7 ÷ 25V DC @ 100mA is required Power supply The printed circuit board requires 7 ÷ 25V DC @ 100mA power supply. Input power circuit deli− vers +5V DC to an isolated DC/DC converter providing bipolar ±5V DC voltage output galvani− cally isolated from an input power supply. A green LED indicates power applied to the modul. Schematic diagram of power supply stage is shown in Fig.6. The main power input is either through connector J1 (2−pin connector) or connector J2 (2.1mm coax power jack). VSS is a net label for +5V DC voltage and VDD is a net label for –5V DC voltage. GND is a common ground for both digital and analog signals galvanically isolated from an input power supply (GND_PWR). Gerstner Lab Prague, Jan−2003 page 9/17 Resolver−to−Digital Module Fig.6: Schematic diagram of the Power supply circuit R/D Integrated Circuits The core of the R/D modul is created by two monolithic ICs – the reference generator unit AD2S99 which provides a constant amplitude sinusoidal excitation for the resolver and the 12−bit R/D converter AD2S90 which translates differential sine and cosine signals generated by the re− solver into a digital information. You can see circuit configuration of these two ICs in Figure 7. Gerstner Lab Prague, Jan−2003 page 10/17 Resolver−to−Digital Module Fig.7: R/D Converter (AD2S90) and Oscillator (AD2S99) configuration AD2S90: R/D Converter The AD2S90 is a 12−bit resolution monolithic resolver−to−digital converter. It provides a complete solution for digitizing resolver signals without using external components. To get position angle θ in digital form, both sine and cosine channel signals must be sent to the R/D converter for decod− ing. This chip provides not only absolute position data output (in serial form), but also standard A Quad B format signals. The absolute position data output gives additional useful information. The serial form of the digital position data is especially suitable for long distance data transmission. All the input/output signals are TTL logic compatible. Functional block diagram is shown in Fig.8. Please, see Appendix B for more details about AD2S90. Gerstner Lab Prague, Jan−2003 page 11/17 Resolver−to−Digital Module Fig.8: Functional block diagram of AD2S90 The AD2S90 emulates a 1024−line encoder. Relating this to converter resolution means one revo− lution produces 1025 A, B pulses. B leads A for increasing angular rotation. The addition of the DIR output negates the need for external A and B direction decode logic. DIR is HI for increasing angular rotation. The north marker NM pulse is generated as the absolute angular position pas− ses through zero. AD2S99: Programmable Oscillator The AD2S99 programmable sinusoidal oscillator provides sine wave excitation for resolvers and a wide variety of AC transducers. The AD2S99 also provides a synchronous reference output sig− nal (3 V p−p square wave) that is phase locked to its SIN and COS inputs. In an application, the SIN and COS inputs are connected to the transducer’s secondary windings. The synchronous ref− erence output compensates for temperature and cabling dependent phase shifts and eliminates the need for external preset phase compensation circuits. The excitation frequency is easily programmed to 2 kHz, 5 kHz, 10 kHz, or 20 kHz by using the frequency select pins. Intermediate frequencies are available by adding an external resistor. Fig.9: Functional block diagram of AD2S99 Functional block diagram is shown in Fig.9. Please, see Appendix B for more details about AD2S99. Gerstner Lab Prague, Jan−2003 page 12/17 Resolver−to−Digital Module Oscillator output stage The output of the AD2S99 oscillator consists of two sinusoidal signals, EXC, and EXC. EXC is 180° phase advanced with respect to EXC. With low impedance transducers, it may be necessary to increase the output current drive of the AD2S99. In such an instance, an external buffer amplifier can be used to provide gain (as needed), and additional current drive for the excitation output (either EXC or EXC) of the AD2S99, providing a single ended drive to the transducer. Refer to Fig.10 for a buffer configurations. Fig.10: Circuit scheme for an excitation signal gain adjustment I/O Connectors Fig.11 presents a top view of the R/D module which outlines the main components and the con− nectors on printed circuit board (PCB). Gerstner Lab Prague, Jan−2003 page 13/17 Resolver−to−Digital Module Fig.11: R/D Module board layout The excitation frequency for the resolver can be easy selected by jumpers setting on JP1 header according to the following table Frequency Jumper position (pin numbers) on JP1 Selection 12 34 56 78 2kHz O I I O 5kHz O I O I 10kHz I O I O 20kHz I O O I Jumper JP2 has to be closed if you don’t want to set up intermediate frequency value. See AD2S99 DataSheet in Appendix B for more details. The function of jumpers JP3 and JP4 is understandable from Fig.10. They can bypass operational amplifiers in excitation output signal buffer circuit. Signal gain is 1 when JP3 and JP4 are closed. Jumper JP3 is bypassing signal EXC_Hi and jumper JP4 is bypassing signal EXC_Lo. Output Encoder connector (J4) is shown in Fig.12. Fig.12: Encoder Output Connector Output Serial connector (J5) is shown in Fig.13. Gerstner Lab Prague, Jan−2003 page 14/17 Resolver−to−Digital Module Fig.13: Serial Output Connector Output connector (J6) signed Add is shown in Fig.14. This connector contents signals not used for standard Quad Encoder or Serial digital communication but are presented in AD2S90 output pins. Fig.14: Add Output Connector The analog velocity output VEL is scaled to produce 150 rps/V DC ±15%. The sense is positive for increasing angular rotation. I/O Resolver connector (J3) is shown in Fig.15. Fig.15: Resolver I/O Connector The resolver shall be connected to the module according to Fig.16. Fig.16: Resolver connection to the R/D module 6−wire cable with a common shield was used in our lab for a signal transmission from an auxiliary BNC connectror box to the R/D module (connector J3). The following table assignment is specific only for this application. Gerstner Lab Prague, Jan−2003 page 15/17 Resolver−to−Digital Module Signal Wire Color SIN_Hi Blue SIN_Lo Grey COS_Hi brown COS_Lo black EXC_Hi red EXC_Lo Yellow Gerstner Lab Prague, Jan−2003 page 16/17 Resolver−to−Digital Module Conclusions The main purpose of this report is to describe the Resolver−to−Digital module. This modul is an interlink between the resolver (analog measurement of speed and position) and the Digital signal processor (digital control of frequency converter). Used control board with Motorola DSP56F805 is equipped with a peripheral circuit assigned to process quadrature signals from an incremental encoder. DC motor in our lab (used as a variable load) has a resolver integrated on its shaft. The applying of R/D module was therefore a natural and the easiest option, how to measure motor speed with− out replacing the resolver by the incremental encoder. Gerstner Lab Prague, Jan−2003 page 17/17 Resolver−to−Digital Module References • Resolver−to−digital Interface Module RDIM16, User Manual, Technosoft 2001 • Circuit Applications of the AD2S90 Resolver−to−Digital Converter, Analog Devices Applica− tion Note, AN−230 • Digital Resolver Integration, Analog Devices Application Note, AN−234 • A New Absolute Inductive Transducer for Brushless Servomotors, Technical Paper, Ad− motec Inc., 1995 Appendix All schematics are included in this appendix. For schematics and PCB design was used software package Protel 99. This appendix includes also datasheets and technical specifications of compo− nents implemented in R/D module design. Gerstner Lab Prague, Jan−2003 3 C10 100nF 1N4007 12V-PWR + D2 CT4M7/10V - Tantal C14 4.7uF Vdd + JP2 + 1000uF/16V + Freq.Aprox 100nF 1 10 9 100nF GND 3 Vss Vdd NM ClkOut sin LO EXC_Hi 7 8 2 B GND TLV2460 U6 NM A 4 DIR Data 1 sin B 3 Vss DGnd A 2 SIN_Lo AGnd CS/ SIN_Hi 6 EXC_Hi 5 AD2S90 cos 6 GND 2 Ry Vdd 1 SCLK COS_Hi 20 Vdd 5 JP3 cos LO CS/ 1 Vel GND COS_Lo 19 R9 R7 1k C Vdd CF1-1M0 Rx 17 Vel 13 SCLK GNDout +Vout 6 5 100k Vss GND Vdd R5 LOS GND CF1-1M0 exc/ U2 AD2S99 GND 11 U5F 74HC04 14 R4 50k U5E 74HC04 C7 GND R3 8 12 exc Vdd U5D 74HC04 14 SYNCout -Vout 9 Ref DCP010505DB C16 18 GNDin Vin 8 SYNCin 7 3 U5B 74HC04 U4 GND-PWR GND 4 17 15 4 2 MKS4-2M2-63V 1 C5 LED U5A 74HC04 exc/ 14 2k5 Vss nc + R2 SEL2 nc nc 15 NMC 2 100uF/10VM cos nc 3 C4 8 18 16 AGnd Vdd Vout GND C3 DGnd 7 exc nc 6 GND COS_Hi AD2S99 sin 13 5 Vdd D exc/ LOS SIN_Hi nc 12 C17 C18 C19 100nF 100nF 100nF GND 4 11 4.7uF C15 16 ClkOut 100nF C11 SynRef 4.7uF C13 SEL1 FBias 100nF C9 Data 2 GND-PWR C6 GND Vss Vss U3 78M05 Vin JACK_PWR C Vss Freq.Selection 10 100nF 1 C2 D3 2 4 6 8 + D C1 1 GND 1 3 5 7 R1 Rf GND 1 2 3 JP1 2 BZX83V008.2 J2 + sh Vdd 19 C12 4.7uF 20 C8 100nF 1 D1 2 1 4 3 J1 2 2 1 13 12 11 Vss GND 10 DIR 9 NM U1 AD2S90 GND GND R8 1k 6 Vdd 5 3 B exc 1 R6 EXC_Lo TLV2460 U7 GND 2 Rx JP4 GND R10 1 2 3 Ry B Vdd=+5V Vss=-5V (+-5%) -------------------------------Freq.output selection: Freq | SEL1 | SEL2 2kHz | Vss | Vss 5kHz | Vss | GND 10kHz | GND | Vss 20kHz | GNH | GND -------------------------------- 4 EXC_Lo J3 8 7 6 5 4 3 2 1 EXC_Lo EXC_Hi COS_Hi COS_Lo SIN_Lo SIN_Hi GND GND_AD GND GND Resolver I/O J4 A B NM DIR J8 A 8 7 6 5 4 3 2 1 EXC_Lo EXC_Hi COS_Hi COS_Lo SIN_Lo SIN_Hi GND GND 74HC04 J5 5 CS/ DATA Encoder OUT 1 2 3 4 GND J6 LOS Vel ClkOut Serial OUT 1 2 3 4 Add OUT GND Title GND 3 2 1 Size Vss Vdd Resolver-to-Digital Board Number Revision 1.0 A4 PWR 1 SCLK6 GND J7 TestPoints U5C 1 2 3 4 5 Date: File: 2 15-Jan-2003 D:\Protel Design\Resolver-to-digital.ddb 3 Sheet of Drawn By: Petr Kadaník 4 A