Low Voltage Ground Fault Protection Optimization for a Modern
advertisement

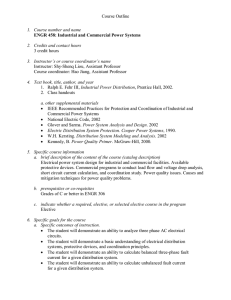
Low Voltage Ground Fault Protection Optimization for a Modern Data Center, A Case History By Reza Tajali, P.E. Square D Company Power Systems Engineering 1010 Airpark Center Drive Nashville, TN 37217 ABSTRACT Data center power systems are designed with stringent requirements for power availability and quality. A common approach is to use solidly grounded low voltage power sources. These sources are tied together through various arrangements of circuit breakers with automatic transfer schemes. Because of the multiplicity of ground return paths, design of the ground fault systems for these switchboards is rather complex. However, no industry standard exists to guide the consulting engineers and users who ultimately specify these systems. This paper serves to illustrate the basic principles and the problems with solid grounding through the case history of the design of one data center. Further, this paper will demonstrate that the ideal circuit breaker for these applications incorporates two independent ground fault sensing units. I- INTRODUCTION The basic goal of power system protection has been to minimize the delay between the inception of a fault and the tripping of circuit breakers. Speed is of essence because the amount of damage at the point of fault is proportional to the length of time the fault is allowed to continue. The most ideal protection system is one that trips instantaneously and accurately. The end user in this case had previous experience with mission critical power systems. An earlier data center project was designed utilizing equipment from various manufacturers, which were tied together into a multiple source configuration. The ground fault protection in that data center had encountered significant difficulties during startup and commissioning. Therefore, a key requirement in the new project was to use a single manufacturer. And the manufacturer was to be involved from the beginning stages of the design process. Figure 1 illustrates a simplified one line diagram of the data center under study. The entire power system is rather complex. But the diagram in figure 1 is sufficient for our purposes to demonstrate the fundamental issues with these systems. The system is basically a ring bus. Multiple sources are brought into the ring with a tie circuit breaker between each two sources. The load bank shown on the top of the ring is for the purpose of testing the generator units. There are many possibilities for grounding the sources in multiple source systems. As is evident in Figure 1, the designer of this data center decided to solidly ground each source of power. Further, the designer decided not to extend the neutral conductor into the main switchboard. Had he extended the neutral conductor into the switchboard, the design of the ground fault system would have encountered even more complexity. The options available to the designers become numerous as the number of sources is increased. For the data center under study, the system designer could have chosen any of the following options: 1. 2. 3. 4. 5. 6. 7. Use high resistance grounding Extend the neutral conductors into the main switchboard Use 4 pole circuit breakers Use 3 pole circuit breakers and tie neutrals from different sources together Solidly ground one source and float the neutral on the other sources Solidly ground only two sources. Solidly ground only three sources Items 1 through 7 list a variety of options available to the designer. However, the purpose of this paper is not to evaluate the merits of these options. For an evaluation of the philosophy of grounding and the merits of various designs refer to reference #7 by this author. The purpose of this paper is to illustrate: 1. The basic problems with ground fault protection design in these systems 2. The methodology for solving these problems UTILITY SOURCE “A” GEN 1 A G1 T1 T7 GEN 2 G2 LOAD BANK T2 UTILITY SOURCE “B” T3 LOAD BUS # 1 B T4 LOAD BUS # 2 T5 T6 LOAD BUS # 3 LOAD BUS # 4 Figure 1: Data Center Power System II- BACKGROUND A basic description of microprocessor based ground fault protection is provided in this section. The intent is to assist those readers who may not be familiar with the details of this technology. Figure 2a illustrates a simple ground fault protection system. These systems include three components: 1. Ground fault sensors 2. An electronic unit that converts the output of the sensors into microprocessor language. In figure 2 this functionality is represented by a circle. It must be emphasized that this symbol is not representing the trip coil of the circuit breaker. 2 3. A microprocessor based tripping circuit. Under normal conditions the sum of the currents through the three sensors adds up to zero. This is generally true for any three phase, three wire electrical power distribution. On figure 2a we have arbitrarily represented the instantaneous currents of phases A and B as ½ per unit flowing downward. In that case, the instantaneous current in phase C will have to be 1 per unit flowing upward. Figure 2b depicts a ground fault on phase A. Because of this fault, the sum of the three phase currents – as seen by the circuit breaker sensors - no longer adds up to zero. Further, this sum of the three phase currents is equal to the ground current according to Kirchhoff’s law. The electronic sensing circuit communicates the magnitude of fault current to the microprocessor. The microprocessor determines the necessary tripping actions. Microprocessor Trip Circuit Electronic Ground Fault Sensing Unit 1/2 1/2 1 1 1 Figure 2a: Microprocessor Based Ground Fault System Figure 2b: Ground Fault III- PROBLEM DEFINITION Figure 3 shows a ground fault on Load Bus #1 of the data center under study. We would normally expect that the ground current would be supplied by source “A”. However, due to the design of the ring bus, multiple sources can supply this fault current. Circuit breakers A, T1 and T7 are closest to this fault and must trip. But circuit breakers G1, G2 and B as well as all the other tie circuit breakers will also carry part of the fault current. If these circuit breakers trip, we have an unnecessary shutdown of the data center. For the fault shown in figure 3, only circuit breakers A, T1 and T7 should trip. 3 The ideal protection system is called differential protection. Figure 3 shows this principle on a portion of the multiple source system1. The dotted line rectangle signifies a zone of protection. Zones of protection are the key characteristic of differential systems. In case of a fault inside a zone, all circuit breakers that are capable of feeding energy directly into the fault are tripped instantaneously. The remaining circuit breakers are not affected. By localizing the tripping action we obtain the highest level of availability of power. On medium and high voltage systems we create differential protection using sophisticated relaying equipment. These systems are rather costly to procure and install. In low voltage systems, however, we have the basic ground fault protection circuit of the circuit breaker to work with. UTILITY SOURCE “A” GEN 1 A GEN 2 G1 T1 G2 LOAD BANK T2 UTILITY SOURCE “B” T3 B T4 Fault T7 LOAD BUS # 1 LOAD BUS # 2 Protection Zone #1 T5 T6 LOAD BUS # 3 LOAD BUS # 4 Figure 3: Ground Fault on Load Bus # 1 Could Shut Down the Entire Data Center IV – PROJECT SPECIFICATIONS Present day circuit breakers incorporate advanced microprocessor systems into their ground fault protection feature. This gives us the capability to include fault memory and other complex algorithms. But the sensing circuits are still composed of current transformers. Therefore, our sophisticated microprocessor based fault detection systems have to depend on the same technology that we used with electromechanical relays. Is this to be viewed as a negative or a weakness in the design? Definitely not. The point to be taken is that the art of power system protection has not changed. Microprocessor based technology gives us enormous advantages, which include memory, fault recording and communication capabilities. But we design protection with the same basic principles that we have known for many years. Systems can be designed with specific arrangements of circuit breakers – for example a tie circuit breaker can be specified to be normally open. However, operational requirements can change in the future. And 1 The exact terminology for the system shown by the dotted lines in figure 2 is “partial differential”. The author of Reference #1 uses the term “modified differential”. However, as we are only interested in illustrating the basic principles, the terminology is used rather loosely. 4 human error can change these pre-defined conditions. Therefore, for mission critical power, the ground fault system must be designed so that it can operate correctly with any configuration of circuit breakers – open, closed, racked out, etc. For the system in figure 1, the electrical specifications stipulated three fundamental design criteria. These criteria form the basis for mission critical project specifications: 1. Any ground fault within the system shall trip only those circuit breakers that feed energy directly into the fault. The remainder of the system shall not be affected. For the fault shown in figure 3, only circuit breakers A, T1 and T7 must trip. 2. The design shall utilize the existing low voltage ground fault trip functions of the circuit breakers. Costly addition of external differential relays is not acceptable. 3. The design shall work irrespective of the status of circuit breakers (open or closed or racked out). Designs that incorporate circuit breaker status auxiliary contacts into the ground fault circuitry are not acceptable. V- DEFINING THE ZONES OF PROTECTION In order to define zones of protection, we first visualize a ground fault. Then, we identify all the circuit breakers that can feed energy directly into that fault. Figure 3 illustrates one such zone, which we will call zone 1. Figure 4 illustrates a ground fault on the source side of circuit breaker A. All other Circuit breakers can feed into this fault by back-feeding through circuit breaker A. However, ideally, only circuit breaker A should trip and the other circuit breakers should not be affected. Therefore, we need zone 2, which is shown by the dotted line encircling circuit breaker A and the load side conductors of the transformer. By similar logic, zone 3 (figure 5) can be drawn around circuit breakers G1, T1 and T2. This process must be continued around the entire system, identifying as many zones as necessary. However, for the purpose of illustration, we will only work with zones 1,2 and 3. UTILITY SOURCE “A” UTILITY SOURCE “B” GEN 1 GEN 2 Zone 2 A G1 T1 T7 G2 LOAD BANK T2 T3 LOAD BUS # 1 B T4 LOAD BUS # 2 T5 T6 LOAD BUS # 3 LOAD BUS # 4 Figure 4: Zone 2 Includes the Line Side of Circuit Breaker “A” 5 UTILITY SOURCE “A” A G1 T1 T7 Zone 3 GEN 1 GEN 2 G2 LOAD BANK T2 UTILITY SOURCE “B” T3 LOAD BUS # 1 B T4 LOAD BUS # 2 T5 T6 LOAD BUS # 3 LOAD BUS # 4 Figure 5: Protection Zone #3 VI- DESIGNING THE PROTECTION SYSTEM We will start by designing the protection for zone 1. The scheme shown in figure 6 provides this protection. Figure 6 shows the ground fault sensors and the circuit breaker ground fault sensing units. The sensor is shown as one current transformer enclosing the three phases. The typical arrangement, however, is to use three sensors, one on each phase (see figure 2). The sensor secondary circuits for each circuit breaker are tied together in parallel to sense the ground fault current. Validity of the design in figure 6 can be illustrated by working several “scenarios”. A scenario is a specific operating condition, which may or may not include a ground fault. References # 1 and 2 provide ample details on setting up and working scenarios. 6 UTILITY SOURCE “A” GEN 1 Zone 1 A G1 T1 T2 Circuit Breaker Ground Fault Sensing Unit T7 T1 T7 A Figure 6: Protection System for Zone 1 Figure 7 displays a ground fault on Load Bus #1. Other scenarios may be constructed by moving the fault to another location or by assuming a circulating current in the system. Assuming current flows per figure 7, we can deduce the secondary currents in the current transformers. These secondary currents flow in the ground fault protection circuit and cause tripping of the three circuit breakers. In figure 7 we are designating the total fault current as 1 per unit. Further, we have arbitrarily assumed that 1/3 per unit returns on each of the three main return paths. Other assumptions can be made, but the result will be the same. UTILITY SOURCE “A” GEN 1 1/3 1/3 Zone 1 A G1 1/3 1/3 T1 1/3 T2 1 T7 1/3 1 T1 T7 A Figure 7: Ground Fault on Load Bus #1. The System Correctly Senses the Ground Fault Magnitude 7 VII- THE NEED FOR TWO GROUND FAULT SENSING UNITS We will now design the circuit for zone #3. Figure 8 provides the solution. Again, working out several scenarios can prove the validity of this solution. Comparing figures 6 and 8, we are presented with an interesting dilemma. The ground fault sensing unit of circuit breaker T1 shows up in two entirely different circuits. It is not possible to tie these two circuits together without causing spurious tripping of the circuit breakers. Designers of these systems have used a variety of complex solutions to solve this problem. But the ideal solution must be simple to understand and easy to implement: 1. If the circuit breaker can be provided with two independent ground fault sensing units, our problem will be solved. It is of interest to note that in all practical applications that we have encountered, there has never been a need for more than two sensing units. This can be understood by realizing that a circuit breaker is a two terminal device. Therefore, each circuit breaker can only be a member of two independent zones of protection. 2. Reference 1 proposes the use of an isolating transformer to transfer tripping energy between independent circuits. The author of that reference has obtained a patent on that methodology. It is of interest to note that one major international circuit breaker manufacturer provides their circuit breakers with the option of two independent ground fault sensing units. UTILITY SOURCE “A” GEN 1 1/3 Zone 3 1/3 A G1 1/3 1/3 1/3 1/3 T1 T2 1 T7 1 T1 T2 G1 Figure 8: Ground Fault Inside of Zone 3. The System Correctly Senses the Ground Fault Current VIII– FIELD COMMISSIONING The key to a successful system is the field startup and commissioning. This work includes simulating various conditions using primary current injection, and verifying correct operation of the system. These 8 conditions may include a fault or a circulating current. Circuit breakers should not trip as a result of circulating currents. In a typical multiple source system, the number of these conditions – or scenarios - is very large. Therefore, often all possible conditions are not tested in the field. This is where the experience and technical qualifications of the manufacturer will directly impact the reliability of the system. The original design must account for every possible scenario. The testing and commissioning process must have specific objectives, procedures and checklists that are custom developed for the project. IX - CONCLUSIONS 1. The optimum circuit breaker for these applications provides two independent ground fault sensing units. The presence of the second unit greatly simplifies application of modified differential ground fault systems. One manufacturer already provides circuit breakers with this capability. 2. If two sensing units are not provided, the design of the ground fault system is more complicated. Reference 1 provides a novel methodology, which utilizes an isolation transformer for transferring tripping energy between independent ground fault circuits. 3. In order to assure a working system, suppliers must be qualified. Knowing the technical basis of the problem presented in this paper, challenge the manufacturer to explain “how they intend to solve it”. Require a written explanation and the methodology of the solution. 4. A good set of specifications will stipulate three fundamental requirements: • Any ground fault within the system shall trip only those circuit breakers that feed energy directly into the fault. The remainder of the system shall not be affected. • The solution shall utilize the existing low voltage ground fault trip function of the circuit breakers. Costly addition of external differential relays is not acceptable. • The design shall work irrespective of the status of circuit breakers (open or closed or racked out). Designs that incorporate breaker status auxiliary contacts into the ground fault circuitry are not acceptable. 5. Mission critical systems require a special level of care and coordination. It is essential to involve the switchgear manufacturers together with the consulting engineer, the contractor and the end user from the early stages of the project. 6. Uncoordinated designs will require significantly longer startup and commissioning work. Such systems may leave a combination of faults and circuit breaker arrangements untested. The problem may remain dormant and show up years later. 7. A commissioning procedure must be developed with detailed test scenarios to assure trouble free operation. It is of utmost importance that the original design of the system accounts for all scenarios. The experience and technical qualifications of the manufacturer in this area will directly reflect on the reliability of the system. 9 X- REFERENCES 1. Elegant Ground Fault Solutions for Impossible Problems, David L. Swindler, IEEE, IAS 46th Annual Petroleum and Chemical Technical Conference, New York, NY, USA, 1999. 2. Modified Differential Ground Fault Protection for Systems Having Multiple Sources and Grounds, David L. Swindler, IEEE IAS PCIC 1993 3. Protective Relaying, Principles and Applications, Second Edition, J. Lewis Blackburn., Marcel Decker, Inc, New York, 1998 4. Applied Protective Relaying, Westinghouse Electric corporation, Coral Springs, FL, 1982 5. Electrical Transmission and Distribution Reference Book, Central Station Engineers of Westinghouse Electric Corporation, Westinghouse Electric Corporation, East Pittsburgh, PA, 1964 6. The Art and Science of Protective Relaying, C. R. Mason, John Wiley and Sons, New York, 1956 7. System Grounding for Mission Critical Power Systems, Reza Tajali, 10