Chapter
4
Stress and strain
In this chapter we introduce the concepts of stress and strain which are crucial for
the understanding of glacier flow. Any calculation of deformation rates and flow
velocities involves stresses and a flow law which relates them to the strain rates. It
is also very useful to take now a look at Appendix C “Vectors and Tensors”. The
notation introduced there will be used below.
4.1
Force
There are two different kinds of forces: body forces and surface forces.
Body forces act on each volume of mass, independent on the surrounding material. Body forces
The gravity force is the body force that causes glaciers to flow. It exerts on each
volume of ice a force that is proportional to the mass within that volume. Other
examples of body forces are inertia forces such as the centrifugal force.
Surface forces arise from the action of one body on another across the surface of Surface forces
contact between them. A typical example is the force exerted from the glacier to its
base, and vice versa. Moreover, across any internal surface of arbitrary orientation
that divides a block of material into two, one side of the block applies a surface force
on the other side.
A force F (typeset in bold face) is a vector quantity and may be divided into its
components along perpendicular directions. Vectors and tensors are explained in
Appendix B.
Force components
z
Force
z
Fz
F
Fx
x
33
x
Chapter 4
4.2
ion
Stress and strain
Stress
A force that acts on a surface is called a stress (or pressure when it is compressive).
The intensity of the force depends on the area of the surface over which the force
is distributed. It is called a traction and is commonly represented in terms of its
components perpendicular and parallel to a surface.
Traction components
Traction
ce stress
In order to satisfy the requirement of mechanical equilibrium, any surface must have
a pair of equal and opposite tractions acting on opposite sides of the surface. This
pair of tractions defines the surface stress vector Σ which is defined by the total
force exerted on the surface divided by the surface area
Σ=
F
.
A
Stress and traction are measured in units of force per unit area
F
N
= 2 = Pa,
and the derived units 105 Pa = 1 bar = 0.1 MPa.
A
m
Surface stress components
Surface stress
(top)
σn
Σ(top)
(top)
σs
(bot)
σs
Σ(bot)
(bot)
σn
al stress
stress
It is convenient to resolve the surface stress into components, one perpendicular to
the surface and two others parallel to the surface at right angles. These components
are called normal stress and shear stress and are denoted by σn and σs1 resp. σs2 .
The condition of mechanical equilibrium implies F(top) + F(bot) = 0, and therefore
F(top) F(bot)
+
= 0,
A
A
Σ(top) + Σ(bot) = 0.
34
(4.1)
Physics of Glaciers I
HS 2013
Equation (4.1) asserts that the tractions on top and bottom of the surface are equal
and opposite. The same must be true for the components of the surface stress
σn(top) = −σn(bot)
σs(top) = −σs(bot) .
and
(4.2)
A pair of normal stresses that point towards each other is called a compressive stress
(negative sign), a pair pointing away from each other is called a extensive stress
(positive sign).
Stress equilibrium
For ease of presentation we consider two dimensions only (analogous relations hold
in three dimensions). The stresses acting on a small volume of material exert forces
and moments that must balance for a mechanical equilibrium.
(top)
(top)
Σz
σzz
(rt)
Σx
(top)
σzx
(lft)
σxx
(lft)
σxz
(rt)
dz
σxx
dx
(rt)
σxz
(lft)
Σx
(bot)
σzx
(bot)
(bot)
Σz
σzz
From the balance of normal and shear tractions (Eq. 4.2) we obtain the relations
(rt)
(lft)
σxx
= −σxx
(top)
(bot)
σzz
= −σzz
(rt)
(lft)
σxz
= −σxz
(top)
(bot)
σzx
= −σzx
.
(4.3)
We also require that all moments with respect to the body center are balanced
(otherwise the body would rotate). This involves only the shear components, since
the moments of all normal components are zero. Denoting the surface areas Ax and
Az , and taking the moment anti-clockwise, we obtain
!
(top)
(bot)
(lft)
(rt)
σzx
Az dz + σzx
Az dz − σxz
Ax dx − σxz
Ax dx = 0 .
35
(4.4)
Chapter 4
Stress and strain
!
Using Ax = Az , dx = dz and Equation (4.3) we obtain 2σzx − 2σxz = 0, which
is equivalent to σzx = σxz . The stress state induced by [Σx , Σz ] (four numbers) is
therefore fully described by the three components
σxx ,
σxz = σzx ,
and σzz .
(4.5)
An analogous relation holds in three dimensions where the stress tensor components
are
σxy
σxx , σyy , σzz
= σyx ,
σxz = σzx ,
σyz = σzy .
(4.6)
Stress tensor
The stress components in Equation (4.5) form a two-dimensional tensor of second
order
Σx
σxx σxz
σ = [σij ] =
=
.
(4.7)
Σz
σxz σzz
Since σxz = σzx , the stress tensor is symmetric, that is
σ = [σij ] = [σji ] = σ T .
(4.8)
Using similar arguments in the three-dimensional case, it is possible to show that
the stress tensor is also symmetric and has the general form
Σx
σxx σxy σxz
σ = [σij ] = Σy = σxy σyy σyz .
(4.9)
Σz
σxz σyz σzz
Notice that only six components are independent, since balance of moments (Eq. 4.6)
leads to σxy = σyx , σyz = σzy and σxz = σzx .
For the stress vector Σ and the unit normal n̂ on an arbitrary surface the following
important relation holds
Σi (n̂) = σ · n̂ = σik nk .
(4.10)
If the stress tensor is known in one coordinate system K, it can be calculated in any
other system K 0 . The transformation formula is the same as in Equation (C.25)
σij0 = αip αjq σpq
or
σ 0 = RσRT .
(4.11)
where R = [α] is an arbitrary rotation.
The above transformation explains, why the shear stress components change their
value by moving from a vertically aligned to a tilted coordinate system.
36
Physics of Glaciers I
HS 2013
Example The components of the stress tensor are
1 2 3
σ = [σij ] = 2 −1 1
3 1 0
Find the traction on a plane defined by
F (x) = x1 + x2 − 1 = 0.
Also determine the angle θ between the stress vector Σ and the surface normal n̂.
Solution: The unit normal on the surface is
∂F
∂x 1
∂F1 = √1 1
n̂ = ∂x
2
2 0
∂F ∂x3
and the traction on the surface is
1 2 3
1
3
1
1
1 =√
1 .
Σ(n̂) = σ n̂ = 2 −1 1 √
2 0
2 4
3 1 0
The angle θ is
cos θ =
Σ(n̂) · n̂
1 4
=√ √
|Σ(n̂)|
2 26
⇒
θ = 56◦ .
Stress invariants
From the examples in section C.2 we know how to calculate quantities that are
independent of the orientation of the coordinate axes. For a second order tensor in
three dimensions three invariants can be constructed. The first is
1
1
1
Iσ = σii = trσ = (σxx + σyy + σzz ),
3
3
3
(4.12)
and is also called the mean stress σm .
mean stress
For incompressible materials like glacier ice, the isotropic mean stress does not
contribute to deformation. It is therefore useful to characterize the stress state by
the stress deviator. The deviatoric stress tensor is that part of the stress tensor deviator
which is extra from the isotropic stress state
1
(d)
σij := σij − σm δij = σij − σii δij .
3
The second invariant of the deviatoric stress tensor is defined by
37
(4.13)
second invaria
Chapter 4
Stress and strain
1 (d) (d) 1
(IIσ(d) )2 = σij σij = (σ (d) )2
2
2
1
(d) 2
(d) 2
(d) 2
(d) 2
(d) 2
(d) 2
=
(σxx
) + (σyy
) + (σzz
) + 2(σxy
) + 2(σxz
) + 2(σyz
) .
2
(4.14)
It is also called the octahedral stress or the effective shear stress, and is often denoted
by τ or σe . It will be important for the formulation of the ice flow law.
invariant
The third invariant IIIσ(d) is the determinant of the deviatoric stress tensor
1 (d) (d) (d)
(d)
IIIσ(d) = det(σij ) = σij σjk σki .
3
(4.15)
It is seldom used in glaciology.
Principal stresses
A face Fn̂ with unit normal n̂ is free of shear forces, if the stress vector Σ(n̂) is
parallel to n̂. In this case the vectors Σ(n̂) and n̂ differ only by a numerical factor
so that we can write
Σ(n̂) = σ · n̂ = λn̂ .
(4.16)
The proportionality constant λ is an eigenvalue and the vector n̂ an eigenvector of
the tensor σ. An eigenvector of the stress tensor always fulfills equation (4.16). It
therefore follows that an eigenvector of σ defines the orientation of a face without
shear stresses. Furthermore, the eigenvalue is the normal stress on this face.
A short reminder of some properties of symmetric tensors:
• All eigenvalues are real numbers.
• Two eigenvectors that belong to different eigenvalues are perpendicular to each
other.
• There exists at least one coordinate system in which the representation of the
tensor has only nonzero values on the main diagonal.
For the Cauchy stress tensor, a coordinate system can always be found in which the
tensor is purely diagonal. The three eigenvectors of σ, designated with s(1) , s(2) and
s(3) , are perpendicular to each other and define a orthogonal coordinate system. In
this coordinate system σ has the form
λ1 0 0
σ = 0 λ2 0 .
(4.17)
0 0 λ3
Since σ · s(i) = λi s(i) (no summation convention!), the eigenvalues λ1 , λ2 and λ3 are
the normal stresses. No tangential stresses act on the faces with unit normal s(i) .
38
Physics of Glaciers I
principal stress
HS 2013
The eigenvalues λi are called principal stress and the eigenvectors s(i) principal
axes.
The eigenvalues can be found by solving the problem
σ · s = λs
which, written in components, reads
or
σij nj sj − λsi = 0
(σij − λδij )sj = 0 .
The trivial solution is sj = 0. The requirement for a non-trivial solution is
det(σij − λδij ) = 0 .
This equation leads to a polynomial of third order in λ, which can be written as
λ3 − I1 λ2 + I2 λ − I3 = 0,
where use has been made of the following invariants of the stress tensor
I1 := trσ = σii ,
1
I2 := (σii σjj − σij σij ) ,
2
I3 := det(σ) .
Note: these invariants are different from the ones used before, but can be combined
to yield the same forms.
39
Chapter 4
4.3
Stress and strain
Deformation
A rigid body motion (translation, rotation) induces no change of the body shape.
The strain of a body is the change in size and shape that the body has experienced
during deformation. The strain is homogeneous if the changes in size and shape
are proportionately identical for each small part of the body and for the body as a
whole. The strain is inhomogeneous if the changes in size and shape of small parts
of the body are different from place to place: straight lines become curved, planes
become curved surfaces, and parallel planes and lines do not remain parallel after
deformation.
n
Linear strain
ch
The stretch sn of a material line segment is defined as the ratio of the deformed
length lf to its undeformed length lo
lf
.
lo
sn :=
nsion
(4.18)
The extension en of a material line segment is the ratio of change in length ∆l to
its initial length lo
lf − lo
∆l
en :=
=
= sn − 1.
(4.19)
lo
lo
(Note the sign convention: a positive extension is lengthening, a negative extension
is shortening the body.) The above definition gives the average extension after a
length change. Going to very small extension increments, one defines the strain ε
n
ε :=
strain
dl
,
l
(4.20)
that is, the ratio of the infinitesimal current extension increment dl with respect
to the current length l. To obtain the finite strain of the extension from lo to
lf we have to integrate Equation (4.20) with respect to l (the reference length l is
increasing with increasing extension)
Z lf
1
lf
ε̄ :=
dl = ln
= ln(sn ) .
(4.21)
lo
lo l
For obvious reasons ε̄ is also called logarithmic strain.
40
Physics of Glaciers I
HS 2013
Strain
We now consider the deformation of an arbitrary body by studying the relative displacement of three neighboring points P , P 0 , P 00 in the body. If they are transformed
to the points Q, Q0 , Q00 in the deformed configuration, the change in area and angles
of the triangle is completely determined if we know the change in length of the sides.
a3 , x3
Q′ b
b
Qb
Pb ′′
b
P′
Q′′
b
P
(x1 , x2 , x3 )
(a1 , a2 , a3 )
a1 , x1
a2 , x2
Consider an infinitesimal line element connecting the point P (a1 , a2 , a3 ) to a neighboring point P 0 (a1 + da1 , a2 + da2 , a3 + da3 ). The square of the length dso of P P 0 in
the original configuration is given by
ds2o = da21 + da22 + da23 = dai dai .
When P and P 0 are deformed to the points Q(x1 , x2 , x3 ) and Q0 (x1 + dx1 , x2 +
dx2 , x3 + dx3 ), respectively, the square of the length ds of the new element QQ0 is
ds2 = dx21 + dx22 + dx23 = dxi dxi .
We may express the transformation from the a coordinate system into the x coordinate system and its inverse by the expressions
xi = xi (a1 , a2 , a3 )
and
ai = ai (x1 , x2 , x3 ) .
(4.22)
Therefore, using the Kronecker delta, we can write (with an arbitrary but convenient
choice of index labels)
∂ak
∂xi
∂xi
ds2 = δij dxi dxj = δij
∂ak
ds2o = δkl dak dal = δkl
41
∂al
dxi dxj ,
∂xj
∂xj
dak dal .
∂al
(4.23)
n tensor
Chapter 4
Stress and strain
The difference between the squares of the length elements may be written as
∂xi ∂xj
2
2
ds − dso = δij
− δkl dak dal ,
(4.24)
∂ak ∂al
or as
2
ds −
ds2o
∂ak ∂al
= δij − δkl
dxi dxj .
∂xi ∂xj
(4.25)
We define the strain tensor in two variants
Green - St. Venant
Cauchy
1
∂xi ∂xk
Ekl =
δij
− δkl ,
2
∂aj ∂al
1
∂ak ∂al
eij =
δij − δkl
,
2
∂xi ∂xj
(4.26)
(4.27)
so that (remember that index names are arbitrary)
ds2 − ds2o = 2Eij dai daj ,
ds2 − ds2o = 2eij dxi dxj .
(4.28)
(4.29)
The Green strain tensor Eij is the strain with reference to the original, undeformed
state and is often referred to as Lagrangian. We will mainly use the Cauchy strain
tensor which is defined with respect to the momentaneous configuration. It is often
referred to as Eulerian.
Eij and eij are tensors in the coordinate systems {ai } and {xi }, respectively. Obviously both are symmetric
Eij = Eji ,
eij = eji .
(4.30)
An immediate consequence of Equations (4.28) and (4.29) is that ds2 − ds2o = 0 implies Eij = eij = 0 and vice versa. Therefore, a deformation in which the length of
every line element remains unchanged is a rigid-body motion (translation or rotation).
Strain components
If we introduce the displacement vector u with the components
u p = x p − ap
then we can write
∂xp
∂up
=
+ δpi ,
∂ai
∂ai
∂ap
∂up
= δpi −
,
∂xi
∂xi
42
Physics of Glaciers I
HS 2013
and the strain tensors reduce to the simpler form
1
∂up
∂uq
Eij =
δpq
+ δpi
+ δqj − δij
2
∂ai
∂aj
1 ∂uj
∂ui ∂uq ∂up
=
+
+
2 ∂ai
∂aj
∂ai ∂aj
and
1
∂up
∂uq
eij =
δij − δpq −
+ δpi
−
+ δqj
2
∂xi
∂xj
1 ∂uj
∂ui
∂uq ∂up
=
+
−
2 ∂xi ∂xj
∂xi ∂xj
We now write out the components for e (the expressions for E are completely analogous), and use the more conventional variable names x, y, z instead of x1 , x2 , x3 ,
and u, v, w instead of u1 , u2 , u3 (notice that we use here u, v, w to designate displacements). This leads to nine terms of the general form
" 2 2 #
2
∂u 1
∂u
∂v
∂w
exx =
−
+
+
,
∂x 2
∂x
∂x
∂x
1 ∂u ∂v
∂u ∂u ∂v ∂v ∂w ∂w
exy =
+
−
+
+
.
(4.31)
2 ∂y ∂x
∂x ∂y ∂x ∂y
∂x ∂y
If the components of displacement ui are such that their first derivatives are very
small and the squares and products of the derivatives of ui are negligible, then eij
reduces to Cauchy’s infinitesimal strain tensor
1 ∂ui ∂uj
εij =
+
.
(4.32)
2 ∂xj
∂xi
In unabridged notation it reads
εxx
εyy
εzz
∂u
=
,
∂x
∂v
=
,
∂y
∂w
=
,
∂z
εxy
εxz
εyz
1 ∂u ∂v
=
+
= εyx ,
2 ∂y ∂x
1 ∂u ∂w
=
+
= εzx ,
2 ∂z
∂x
1 ∂v ∂w
=
+
= εzy .
2 ∂z
∂y
(4.33)
In the case of infinitesimal displacement, the distinction between the Lagrangian and
Eulerian tensor disappears, since it is unimportant whether the derivatives of the
displacements are calculated at the position of a point before or after deformation.
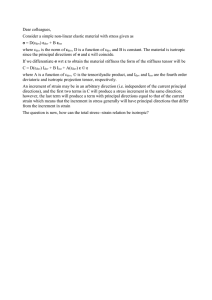
Four common cases are shown in Figure 4.1.
43
Chapter 4
Stress and strain
zu
u+
zu
∂u
∂x dx
u+
∂u
∂x dx
x
Case 1:
∂u
∂x
x
> 0, w = 0
Slope to vertical =
Case 2:
∂u
∂x
< 0, w = 0
∂u
∂z
z
z
Slope =
∂w
∂x
x
x
Case 3:
∂u
∂z
> 0,
∂w
∂x
>0
Case 4:
∂u
∂z
> 0,
∂u
∂x
=
∂w
∂x
=0
Figure 4.1: Different strain states: uniaxial extension (case 1), uniaxial compression
(case 2), shear (case 3) and simple shear (case 4).
Rotation
Consider the infinitesimal displacement field ui (x1 , x2 , x3 ). We then can form the
cartesian tensor
1 ∂uj
∂ui
ωij =
−
,
(4.34)
2 ∂xi
∂xj
which is antisymmetric, i.e.
ωij = −ωji .
(4.35)
Therefore the rotation tensor ωij has only three independent components – ω12 , ω23
and ω31 – because ω11 = ω22 = ω33 = 0.
We can therefore write any relative movement of two points as the sum of a rotation
and a deformation. Consider a point P with coordinates xi and a point P 0 in the
neighborhood with coordinates xi +dxi . The relative displacement of P 0 with respect
44
Physics of Glaciers I
HS 2013
to P is
dui =
∂ui
dxj .
∂xj
(4.36)
This can be rewritten as
1 ∂ui ∂uj
1 ∂ui
∂uj
dui =
+
dxj +
−
dxj = (εij + ωij ) dxj .
2 ∂xj
∂xi
2 ∂xj
∂xi
(4.37)
Strain rate
For the study of glacier flow, we are concerned with the velocity field v(x, y, z),
which describes the velocity of every particle of the body. At every point (x, y, z),
the velocity field is expressed by the components (from now on u, v and w are used
to denote the components of the velocity vector)
u(x, y, z),
v(x, y, z),
w(x, y, z),
or by vi (x1 , x2 , x3 ) in index notation.
Note: we reuse the letter u, v, w to designate velocity components instead of displacement components. Since the velocity is just the change in time of the infinitesimal displacement, the equations from section (4.3) apply unaltered. Instead of the
infinitesimal strain tensor, we now look at the strain rate tensor
strain rate
1 ∂vi
∂vj
ε̇ij :=
+
.
(4.38)
2 ∂xj ∂xi
The only change with respect to Eq. (4.32) is the dot, the use of velocity vi instead
of displacement ui . Remember that the dot is part of the symbol used to designate
“strain rate” and does not indicate a time derivative. Notice that other authors
(e.g. K. Hutter) use the symbol Dij .
45
 0
0
advertisement



Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users