Available online at www.sciencedirect.com
Computers and Chemical Engineering 32 (2008) 2365–2381
Review
Dynamic modelling and control of planar
anode-supported solid oxide fuel cell
A. Chaisantikulwat, C. Diaz-Goano ∗ , E.S. Meadows
Department of Chemical and Materials Engineering, University of Alberta, Edmonton, Alberta, Canada T6G 2G6
Received 11 October 2006; received in revised form 23 July 2007; accepted 14 December 2007
Available online 5 January 2008
Abstract
Most solid oxide fuel cell (SOFC) modelling efforts emphasize steady-state cell operation. However, understanding the dynamic behaviour is
essential to predict the performance and limitations of SOFC power systems. This article presents the development of a SOFC dynamic model
and a feedback control scheme that can maintain output voltage despite load changes. Dynamic responses are determined as the solutions of
coupled partial differential equations derived from conservation laws of charges, mass, momentum and energy. To obtain the performance curve,
the dynamic model is subjected to varying load current for different fuel specifications. From such a model, the voltage responses to step changes in
the fuel concentration and load current are determined. Low-order dynamic models that are sufficient for feedback control design are derived from
the step responses. The development of the partial differential equation model is outlined and the limitations of the control system are discussed.
© 2008 Elsevier Ltd. All rights reserved.
Keywords: Solid oxide fuel cell; Dynamic modelling; Simulation; Load change; Control
Contents
1.
2.
3.
4.
∗
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SOFC operating principles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1. Thermodynamics of solid oxide fuel cells . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2. Voltage and overpotentials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3. Electrochemical kinetics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Modelling approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1. Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Transport equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1. Ionic charge transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2. Electronic charge transport. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.3. Mass transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.4. Momentum transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.5. Heat transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3. Model implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Numerical results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1. Steady-state simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1. Ionic and electronic potentials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.2. Mass diffusion and convection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.3. Fluid velocity and pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.4. Temperature distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Corresponding author. Tel.: +1 403 294 4366.
E-mail address: carolina@ualberta.net (C. Diaz-Goano).
URL: www.ualberta.ca/∼carolina/ (C. Diaz-Goano).
0098-1354/$ – see front matter © 2008 Elsevier Ltd. All rights reserved.
doi:10.1016/j.compchemeng.2007.12.003
2366
2366
2366
2367
2367
2368
2368
2368
2368
2369
2369
2369
2370
2370
2371
2371
2372
2372
2373
2373
2366
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
4.2.
4.3.
5.
6.
Nominal operating condition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2374
Dynamic modelling results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2374
4.3.1. Step changes in load current density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2374
4.3.2. Step changes in hydrogen molar fraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2376
Process control of SOFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2377
5.1. Low-order dynamic model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2378
5.2. Feedback control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2378
5.2.1. Proportional controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2379
5.2.2. PI controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2379
5.2.3. Disturbance rejection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2379
Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2380
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2381
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2381
1. Introduction
A fuel cell is a device that converts a constant supply of fuel
directly to electrical power. Solid oxide fuel cells (SOFC) have
emerged as one of the leading fuel cell technologies which can
be used in a wide range of commercial applications. Their solid
electrolyte is made of a ceramic material which requires the
operating temperature range of 800–1000 ◦ C. In recent years,
the number of computational models of SOFC has been gradually increasing. Since SOFC operations are often subjected
to transient condition such as changes in power demand, fuel
cell dynamics have been increasingly considered in modelling
activities. By developing a physically based dynamic model,
the transient behaviour of SOFC can be accurately predicted
and the design envelopes can be optimized. The dynamic model
is especially beneficial for control testing in the development
stage of SOFC.
Most of the existing dynamic models were developed for prediction of SOFC performance and limitations. Additionally, the
majority of dynamic models for process control have focused on
large-scale operation such as an integrated-SOFC power plant
system. For instance, Stiller, Thorud, Bolland, Kandepu, and
Imsland (2006) and Thorud, Bolland, and Kvamsdal (2002)
have presented a dynamic model for control of the integrated
SOFC and turbine systems. It has been shown that the power
supplied by the SOFC system can be controlled by manipulating the fuel flow using a proportional–integral–derivative (PID)
type controller. In other work by Aguiar, Adjimana, and Brandon
(2005), the temperature control of a stack-level SOFC model
was presented. A PID controller was implemented to maintain
the outlet fuel temperature and the fuel utilization during load
changes by varying the air flow rates. The findings from these
models emphasize the need for the process control to enhance
the reliability and minimize the degradation of SOFC.
A physically based three-dimensional (3D) dynamic model of
a single SOFC is presented in this article. To investigate the transient performance and limitations of SOFC, this dynamic model
is subjected to step changes in inlet gas concentrations and external load currents. Low-order models capable of capturing the
main dynamic behaviour of the SOFC system are derived from
the step responses. Feedback PI controllers are simulated with
the low-order models in the voltage control-loop. An approach
to control the output voltage such that it is close to the set-point
voltage despite external load changes is outlined.
The remaining of this article is organized as follows: Section
2 presents a review of the SOFC operating principles; Section 3
presents the numerical formulation for the dynamic model; Section 4 discusses the steady-state and dynamic modelling results;
Section 5 addresses the control of the SOFC output voltage in
the presence of varying load by implementing a PI controller.
The concluding remarks are presented in Section 6.
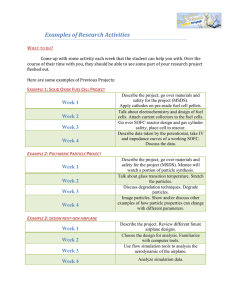
2. SOFC operating principles
In SOFC, the oxygen ion (O2− ) is the mobile ion transferred
through a solid electrolyte in the following half-cell reactions at
the cathode and anode, respectively.
+ 2e− ↔ O2−
(1)
H2 + O2− ↔ H2 O + 2e−
(2)
1
2 O2
The overall reaction is then
H2 + 21 O2 → H2 O
(3)
A schematic diagram presenting the flow of mass and charges
for a SOFC is shown in Fig. 1.
2.1. Thermodynamics of solid oxide fuel cells
The amount of voltage that an electrochemical fuel cell
produced is determined from the change in Gibbs free energy
of an overall chemical reaction. The change in Gibbs free
energy is dependent on the partial pressure of the reactants and
products. For a hydrogen–oxygen fuel cell, the change in Gibbs
free energy is
P H2 O
◦
G(T ) = G (T ) + RT ln
(4)
1/2
PH2 PO2
where G◦ (T ) is the Gibbs free energy change at standard
state. At equilibrium, the change in Gibbs free energy is related
to the electrochemical work done by electrons according to the
equation
G(T ) = −ne FE(T )
(5)
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Nomenclature
a
Cp
Dik
D̃ik
DK
E
F
F̂
h
hi
ji
J
J◦
k
KP
KL
n
ne
P
Q
r̄i
R
RΩ
S
t
T
u
V
wi
xi
stoichiometric coefficient
isobaric molar heat capacity (J/kg K)
binary diffusivity between species i and k (m2 /s)
multicomponent Fick diffusivity (m2 /s)
Knudsen diffusivity (m2 /s)
electrical potential (V)
Faraday’s constant (96,484.56 C/mol e− )
radiative view factor
convective heat transfer coefficient (W/m2 K)
enthalpy of species i (J/kg)
mass flux of species i (kg/m2 s)
current density (A/m2 )
exchange current density (A/m2 )
thermal conductivity (W/m K)
process steady-state gain
disturbance steady-state gain
unit normal vector
number of moles of electrons
pressure (Pa)
heat source (W/m3 )
mean pore radius (m)
universal gas constant (8.314 J/mol K)
resistivity ( m2 )
entropy (J/mol K)
unit tangential vector
temperature (K)
velocity (m/s)
voltage or potential (V)
mass fraction of species i
molar fraction of species i
Greek symbols
δ
layer thickness (m)
emissivity
ε
porosity
ηact
activation overpotential (V)
ηconc
concentration overpotential (V)
κ
permeability (m2 )
μ
dynamic viscosity (kg/m s)
νi
mean molecular velocity (m/s)
ρ
density (kg/m3 )
σ
conductivity (S/m2 )
τ
tortuosity
io
load
2367
ionic property
load resistance
where F is the Faraday’s number. Since two electrons are
transferred for every one mole of reacted hydrogen, ne = 2.
Combining the above equations, the Nernst voltage is obtained.
RT
PH2 O
◦
(6)
ln
E(T ) = E (T ) −
1/2
2F
P H2 P
O2
E◦ (T )
Here,
is the standard electrode potential. This Nernst
potential corresponds to the thermodynamically reversible open
circuit voltage, VOCV and E(T ) = VOCV,A .
2.2. Voltage and overpotentials
SOFC output voltage is calculated from the reversible voltage
and the sum of activation loss due to non-equilibrium condition,
concentration loss by mass transport limitation and voltage loss
due to ohmic resistance. In this study, the concentration loss is
accounted for in the mass transport model and is incorporated in
the calculation of the reversible, electronic and ionic potentials
at the electrode–electrolyte interface.
Vcell = VOCV − ηact − ηconc − JRΩ
(7)
The activation loss or overpotential is determined from the difference between electronic potential at the electrode and ionic
potential at the electrolyte over the equilibrium potential.
ηact = (Vel − Vio ) − VOCV
(8)
The activation loss at the cathode is known to be larger than
that at the anode, Chen (2003). This activation overpotential
contributes to the kinetics of the electrode reactions occurring
at the electrode–electrolyte interfaces.
2.3. Electrochemical kinetics
The rate of current density produced at the interface is related
to the activation overpotential as described by the Butler–Volmer
equation.
F
F
(9)
ηact − exp −αC
ηact
J = J◦ exp αA
RT
RT
Subscripts
A
anode
AI
anode interconnect
cell
fuel cell property
C
cathode
CI
cathode interconnect
el
electronic property
eff
effective parameter in porous medium
E
electrolyte
f
fluid property of reactive gas
Fig. 1. Schematic diagram of mass and charges flows in SOFC components.
2368
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
According to Costamagna and Honegger (1998), the value of the
apparent charge transfer coefficients, αA and αC , are 1.4 and 0.6,
respectively, for the cathode current density, JC . For the anode
current density, JA , their values are 2.0 and 1.0, respectively. The
exchange current density, J◦ , is related to the partial pressure
of chemical species. The cathode and anode exchange current
density are given as
PO2 0.25
Eact,C
exp −
Pref
RT
P H2
P H2 O
Eact,A
exp −
= γA
Pref
Pref
RT
J◦,C = γC
(10)
J◦,A
(11)
Here, γC and γA are the pre-exponential coefficients. Eact,C
and Eact,A represent the activation energies of the cathode and
anode exchange current densities, respectively. To account for
the concentration loss, the partial pressure of gas species at the
electrode–electrolyte interface is used in the above equations.
3. Modelling approach
3.1. Assumptions
Mathematical models of SOFC were derived from coupled
partial differential equations describing the transport of charges,
mass, momentum and energy. Additionally, knowledge of thermodynamics and electrochemical kinetics were essential for the
development of the model. The dynamic model was developed
for a 3D anode-supported planar SOFC with a counter-current
flow direction of air and fuel as shown in Fig. 2. The following
necessary assumptions were made:
(1) The SOFC components were H2 –H2 O–N2 , Ni–YSZ/8YSZ/
LSM, air. The interconnects were metal alloys.
(2) The electrochemical reactions occurred at the electrode–
electrolyte boundaries.
(3) Bulk diffusion and Knudsen diffusion occurred in the flow
channels and the porous electrodes, respectively.
(4) Gas streams were preheated with uniform temperatures and
velocities at the flow inlets. The outer SOFC boundaries
were thermally insulated.
(5) The density and heat capacity of the solid components were
temperature independent.
(6) Heat transfer was convection-dominated in the gas channels,
while it was conduction-dominated in the solid phase.
3.2. Transport equations
Formulation of the transport equations was required to model
the SOFC potentials, species concentrations, flow profiles and
temperature gradients. The electronic and ionic charge transports were assumed to be in steady-state since, as stated by
Haynes (2002), these were instantaneous phenomena. Therefore, in the current work, the time-derivative term was applied
only to the mass, momentum and heat equations. The proper
boundary conditions were specified to solve the partial differential equations accordingly.
3.2.1. Ionic charge transport
The following ionic charge transport equation applied to the
electrolyte layer.
−∇ · (σio ∇Vio ) = 0
(12)
Here, σio and Vio represented the ionic conductivity and the ionic
potential, respectively. At the electrode–electrolyte boundary,
the normal ionic current density was equal to the Butler–Volmer
current density. For the other boundaries where no ionic charge
was transferred, the normal ionic current density was specified
as zero.
Fig. 2. SOFC modelling domain and its dimension.
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
2369
3.2.2. Electronic charge transport
The electronic model coupled with the ionic model provided
solution to the local potential losses in the electrolyte, electrodes
and interconnects. The electronic charge balance equation at the
electrodes and their interconnects was given as
Combining the Knudsen diffusivity with the binary diffusivity,
a modified diffusivity was obtained.
Dik DK,i
(19)
D̂ik =
Dik + DK,i
−∇ · (σel ∇Vel ) = 0
For mass transport in porous electrodes, the effective binary
diffusivity depended on the material properties such as the porosity, tortuosity and pore size. The effective diffusivity for the
porous material was corrected by the ratio of the porosity to the
tortuosity.
(13)
At the electrode–electrolyte boundary, the magnitude of the normal current density was equal to the Butler–Volmer current
density. However, the ionic and electronic charges flowed in
the opposite direction to one another. At the anode interconnect boundary, the net current demanded by the external load
resistance was specified.
−n · Jel = −Jload
(14)
At the outer boundary of the cathode interconnect, the voltage
was specified as a zero reference voltage.
3.2.3. Mass transport
Mass transport in the porous electrodes and the flow channels
was modeled using the continuity equation.
∂
(15)
(ρwi ) = −∇ · (ji + ρwi u)
∂t
where wi was the mass fraction. The mass flux, ji , was calculated
using the Maxwell–Stefan model, which accounted for molecular interactions between gas mixtures in a multicomponent
system.
N ∇P
D̃iK ∇xk + (xk − wk )
ji = −ρwi
(16)
P
k=1
Here, D̃ik was the multicomponent Fick diffusivity between
species i and k. Since the density of gas mixture was
relatively low in the hydrogen SOFC application, the multicomponent Fick diffusivities were calculated from the binary
diffusivities for all pairs of gas species. The method of calculating the multicomponent Fick diffusivity can be found in
COMSOL (2004). The binary diffusivities can be determined
from the Chapman–Enskog gas kinetic theory (Bird, Stewart, &
Lightfoot, 1960)
0.5
1
(1.8583 × 10−7 )T 1.5
1
Dik =
(17)
+
2 Ω̂
MWi
MWk
P σ̂ik
D,ik
where σ̂ik was the average collision diameter and Ω̂D,ik was
the collision integral based on the Lennard–Jones potentials.
Diffusion mechanism in the porous electrodes differed from that
in the flow channels. In the porous electrodes, the average pore
size was considerably smaller than the gas particle’s mean free
path. As a result, the molecule-to-wall of gas particles collision
dominated the molecule-to-molecule collision. Hence, Knudsen
diffusion was incorporated in the mass transport model in the
porous electrodes. The Knudsen diffusivity was calculated as
follow
8RT
2
DK,i = r̄i
(18)
3
πMWi
eff
D̂ik
=
ε
D̂ik
τ
(20)
Since mass transport in the flow channels was convectiondominated, the convective flux boundary condition was applied
to the channel outlets. This boundary condition represented a
zero diffusive component across the channel outlets.
−n · ji = 0
(21)
At the electrode–electrolyte interfaces, the rate of the electrochemical reaction was related to the rate of current generation
according to the Butler–Volmer expression, JA or JC .
±a
JA/C MWi
−n · ji + ρwi u =
(22)
ne F
Here, a was the stoichiometric coefficient, which carried a negative and positive sign when the species i was being consumed
and produced, respectively. The solution to this boundary condition returned the partial pressure of chemical species as a result
of the concentration loss throughout the porous electrodes. The
inlet mass fraction was specified at the inlet of the air and fuel
channels.
3.2.4. Momentum transport
To model the flow profile in the gas channels and the porous
electrodes, the general Navier–Stokes equation was employed.
∂u
2
T
ρ
+ ρu · ∇u = −∇P + ∇ · μ(∇u + (∇u) ) − μ∇ · u
∂t
3
(23)
The above equation was used in conjunction with the continuity
equation.
∂ρ
+ ∇ · (ρu) = 0
∂t
(24)
In the porous electrodes, the flow was modeled using the Darcy’s
Law
κ
u = − ∇P
(25)
μ
where κ was the permeability of the electrode material. The
uniform inlet velocity was specified at the channel inlets. At the
outlets, the pressures and the normal flow boundary condition
were specified.
P = Pout ,
t·u=0
(26)
2370
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
At the electrode–electrolyte boundaries, the change in the gas
velocity dependeds on the net rate of the species produced and
consumed at that interface.
N
a
JA/C
(27)
MWi
−n · u = −
ne F
ρ
i=1
Pressure conditions at the electrode–gas channel interfaces were
specified to be equal to the Navier–Stokes pressure at the channel
walls.
PDarcy = PNavier−Stokes
(28)
3.2.5. Heat transport
Many mechanical properties of the SOFC components were
temperature dependent. Therefore, it was essential to develop a
heat transport model that could account for various heat effects
in both of the solid structure and the flow channels. The following equation accounted for conductive heat transfer in the solid
structure
∂ (29)
(ρCp )T = −∇ · (−keff ∇T ) + Q
∂t
where Cp was the specific heat capacity, keff was the effective
thermal conductivity and Q was the heat source. The subscript eff
denoted the effective parameters associated with the porous electrodes. The effective thermal conductivity of a porous electrode
was determined from
keff = εkf + (1 − ε)ks
(30)
where ε was the electrode porosity and the subscript f and s
denoted the fluid and solid properties, respectively. For SOFC
with hydrogen as a fuel source, the followings heat sources were
generated (VanderSteen, Kenney, Pharoah, & Karan, 2004):
• Ohmic heating due to resistances in ionic and electronic conducting materials.
• Heat generated by the activation overpotentials under a nonequilibrium condition.
• Heat loss through entropy change in the electrochemical reactions.
The Ohmic heat was generated by the material resistance due
to current flow.
Qohm =
J2
σ
(31)
This ohmic heat represented the heat source Q in Eq. (29) which
applied to the entire solid structure. The activation overpotential
contributed to the heat generation at the electrode–electrolyte
boundaries. It represented the irreversible heat loss which was
not recoverable from the electrochemical reaction.
Qact = Jηact
(32)
Some part of the energy provided by the overall reaction cannot
be completely converted to electrical energy. As a results, the
change in entropy of reaction contributed to heat generation at
the electrode–electrolyte interfaces. The entropy heat effect was
given by
T (S)
(33)
Qrev = J −
2F
where S was the entropy change of the half-cell reaction. Thus,
the boundary condition along the electrode–electrolyte interface
became
T (S)
−n · (−keff ∇Ts ) = −
(34)
+ ηact J
2F
The entropic heat effects were generated in unequal amounts at
the interfaces. The amount of entropic heat was greater at the
cathode–electrolyte boundary than the anode–electrolyte boundary due to the exothermic heat effect.
The fluid temperature model applied to the flow channels. To
account for the effect of mass transport, the enthalpy change as
a result of species diffusion was included. The heat equation for
the fluid was given as
N
∂Tf
= −∇ · −kf ∇Tf +
hi ji − (ρCp )f u · ∇Tf (35)
(ρCp )f
∂t
i=1
where hi was the species enthalpy in J/kg and ji was the mass
flux of species i. It was determined by VanderSteen et al. (2004)
that surface radiation contributed to the overall heat effect in the
SOFC. Therefore, the radiative effect was incorporated in the
heat model as a form of surface heat transfer. The convective and
radiative heat effects were implemented as a boundary condition
along the flow channel walls.
4
−n · (−k∇Ts ) = hf (Tf,bulk − Ts ) + σ̃ F̂ (Tf,bulk
− Ts4 )
(36)
Here, hf was the convective heat transfer coefficient, Tf,bulk was
the bulk fluid temperature, was the emissivity of the solid
component and σ̃ was the Stefan-Boltzmann constant. F̂ was
the radiative view factor which accounted for the radiative interaction between surfaces. The view factor for surface-to-surface
radiation was calculated according to the modelling geometry
specified in Section 3.1. Since convective heat transfer dominated in the flow channels, the outlet heat flux was entirely
convective and the conductive flux was zero.
3.3. Model implementation
The model was implemented in COMSOL (2005), a partial
differential equation solver based on a finite element method.
Structured mesh elements were composed of 3D rectangular
parallelepiped as shown in Fig. 3. The mesh consisted of 1152
elements with 42,487 degrees of freedom. The direct solver
(UMFPACK) was used for steady-state and dynamic calculations. A relative tolerance of 1 × 10−5 was specified for the
nonlinear system solver. In the dynamic simulation, changes to
the system input variables with respect to time were generated
using a step function. The automatic time steps were generated
using the adaptive time-stepping solver. The SOFC properties
required for solving the models are shown in Table 1. The simulation were carried out for a SOFC operating condition as shown
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 3. Mapped mesh for 3D geometry.
in Table 2. The steady-state model results were obtained for five
different fuel compositions, each containing 10%, 24%, 49%,
73% and 97% hydrogen. The model was solved by using the
specified current density as a forcing function for each fuel
composition.
4. Numerical results
4.1. Steady-state simulation results
The solutions corresponding to each fuel composition at various current density were determined. The model was validated
according to the experimental results from Keegan et al. (2002)
which had a similar operating parameters to the model. However,
2371
the experiment was conducted on a button-type SOFC which
had a different geometry than the planar cell. Therefore, the discrepancy between the simulated and experimental results were
expected. However, the purpose of this work was to develop
a dynamic model for the process control. For this reason, the
validation goal was not to precisely fit the experimental data,
but rather to capture the overall trend of the fuel cell performance curve. Additionally, the exact match between the model
and the experiment was not required in the development of controller, since the presence of feedback control would compensate
for the model error. To implement the controller in the voltage
control-loop, it was necessary for the SOFC to have a stable voltage under normal operating condition. Since the output voltage
always decreased with increasing load current, the voltage stability was always guaranteed in the event of the process being
uncontrolled. Therefore, the controller stability was attainable
even when model errors existed. The numerical results from
this model were then compared to the experimental results for
qualitative purposes.
A comparison of the simulated and experimental cell voltages
is shown in Fig. 4. The current-voltage curve was generated
using the following parameters in the exchange current densities; γC = 9.61 × 108 , γA = 7.55 × 109 , Eact,C = 110 × 103
and Eact,A = 120 × 103 . It was observed that the predicted voltage curve had a similar shape to that of the experimental data.
Although the limiting currents did not agreed well with each
other, the predicted voltages showed similar tailing effects at
high current densities. To produce the tailing effect in the simulated voltage, an anode tortuosity of 8.5 was used. This value
was within the typical value of the anode tortuosity in the range
of 2–10 as reported by Williford, Chick, Maupin, Simner, and
Stevenson (2003). The voltage drop at high current density was
Table 1
SOFC properties for the SOFC model
Parameters
Electrolyte
Cathode
Anode
σ (S/m)
3.34 × 104 e−10,300/T
4.0×107
T
9.0×107
T
ε
τ
r̄ (m)
–
–
–
0.3
2.5 [3]
1.0 × 10−6 [4]
0.3
8.5
1.07 × 10−6 [5]
–
–
–
Cp (J/kg K)
k (W/mK)
ρ (kg/m3 )
100
2.7
6000
377
2.37
4640
377
11.0
4760
300
2.2
Same as electrode
[1]
e−1200/T
[1]
e−1150/T
[1]
Interconnect
Source
4 × 106
[1] Ferguson, Fiard, and Herbin
(1996) and [2] Costamagna and
Honegger (1998)
Costamagna and Honegger (1998)
[3] Chan, Chen, and Khor (2004)
[4] Zhu and Kee (2003) and [5]
Ackmann, de Haart, Lehnert, and
Stolten (2003)
Chyu (2005)
Chyu (2005)
Chyu (2005)
[2]
Table 2
Simulation condition for the half-channel SOFC model
Parameters
Fuel
Air
Composition
Flowrate
Inlet velocity
10–97 mol% H2 , 3 mol% H2 O, balancing N2
10 standard cm3 /min
1.25 m/s
21 mol% O2 , 79 mol% N2
15 standard cm3 /min
1.87 m/s
Inlet temperature
Outlet pressure
Load current density
1023 K (750 ◦ C)
1 atm
0–1.8 A/cm2
2372
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 4. Comparison of simulated and experimental cell voltages at 750 ◦ C
(Keegan et al., 2002).
largely due to the concentration loss, especially at the anode. The
mass transport of the fuel in the porous anode was limited by
the diffusion mechanism and the anode thickness. In the anode
reaction, the fuel utilization increased with increasing load current. However, the amount of hydrogen at the reactive site was
not sufficient to supply the electrode reactions due to the diffusion limitation. As a result, a sharp drop in the voltage was
evident in the high current region. In the low current region, a
voltage drop was present as a result of the kinetic limitation of
the electrode reactions. This limitation represented the activation
loss which was prominent in the high current density operation.
Overall, the simulated voltages at various fuel concentrations
were within the same magnitude as those from the experiment.
Although the performance curve contained the same trend as
the experimental results, the mismatch in the limiting current
density contributed to the largest deviation. The average percent
differences between the simulated and experimental results for
the hydrogen fuel of 10%, 24%, 49%, 73% and 97% were 5.8%,
4.9%, 3.2%, 12.5% and 12.4%, respectively. On average, the predicted voltages for the SOFC operating with 49% hydrogen fuel
agreed best with the experimental values. The main contribution
to the discrepancy was likely due to model parameter errors since
the parameters used in the model were collected from various
sources. The difference in the component thicknesses and the
cell geometry between the proposed model and the experiment
was also a major contribution to the overall discrepancy.
The steady-state modelling results for a 49% hydrogen fuel
at the load current of 0.80 A/cm2 are shown in the following
sections. The corresponding cell voltage was 0.743 V.
4.1.1. Ionic and electronic potentials
The cross-sectional plot of the electronic SOFC potential is
presented in Fig. 5. The overall cell voltage was calculated from
the potential difference between the cathode and anode interconnects. The arrows represented the direction of the current flow.
The magnitude of current density across the SOFC component is
shown in Fig. 6. The magnitude of the current density was largest
as the current flew through the corners of the electrode–gas channels due to the geometry effect. This was more prominent at the
Fig. 5. Cross-sectional voltage (x = 9.5 mm) with arrows showing the direction
of the current flow.
cathode where the layer thickness was much smaller than the
anode.
4.1.2. Mass diffusion and convection
The hydrogen and water distributions in the anode and fuel
channel are illustrated in Figs. 7 and 8, respectively. The concentration gradients of hydrogen and water in the fuel channel were
not substantial, whereas the gradients were large in the porous
anode. It was observed that hydrogen was consumed mostly in
the anode location close to the fuel channel outlet. This was also
the area where the most water was produced. The outlet molar
fraction of hydrogen and water were 39% and 13%, respectively.
The oxygen distribution in the porous cathode and the air channel is shown in Fig. 9. The gradient of oxygen along the air
channel was significantly less than that along the porous cathode. Although the cathode thickness was smaller than that of the
anode, the diffusivity of oxygen in the cathode was much smaller
than the hydrogen diffusivity in the anode. For this reason, a large
Fig. 6. Cross-sectional SOFC showing streamlines of current density (x =
0 mm) for 49% H2 fuel at 0.80 A/cm2 .
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 7. Molar fraction of hydrogen in the anode and the fuel channel for 49%
H2 fuel at 0.80 A/cm2 .
2373
Fig. 10. Fluid velocity in the electrodes and the gas channels.
4.1.3. Fluid velocity and pressure
The gas velocities in the flow channels and the porous electrodes are shown in Fig. 10. The arrow showed the direction of
the fluid flow with the magnitude being proportional to the fluid
velocity. The fuel and air flows reached their maximum velocity of approximately 3.3 m/s and 5.5 m/s, respectively, at their
channel outlets. The velocity changes in the porous electrodes
relative to the gas channels were considerably less noticeable.
The pressure gradient at the air channel was found to be significantly larger than that at the fuel channel. The pressure drop in
the fuel channel was 30 kPa, whereas the pressure drop in the
air channel was 65 kPa. This larger pressure drop occurred as a
result of greater fluid velocity.
gradient of oxygen concentration was observed through out the
cathode. The outlet molar fraction of oxygen was approximately
16%. The results from the mass transport model showed the
hydrogen and air utilization of 19.2% and 18.3%, respectively.
4.1.4. Temperature distribution
The temperature distribution in the solid phase is presented
in Fig. 11. The maximum temperature difference for the overall SOFC was found to be 40 K. The highest temperature was
observed in the electrode–electrolyte layer in the middle region
of the cell. The temperature distribution along the anode, cathode
and electrolyte (x = 9 mm, y = 1 mm) is illustrated in Fig. 12.
Since the cathode reaction was exothermic, the highest solid
Fig. 9. Molar fraction of oxygen in the cathode and the air channel for 49% H2
fuel at 0.80 A/cm2 .
Fig. 11. Solid temperature of the electrolyte, electrodes and interconnects for
49% H2 fuel at 0.80 A/cm2 .
Fig. 8. Molar fraction of water in the anode and the fuel channel for 49% H2
fuel at 0.80 A/cm2 .
2374
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 12. Solid temperature across the electrodes and electrolyte for 49% H2 fuel
at 0.80 A/cm2 .
temperature was seen at the interface between the cathode
and electrolyte. However, the maximum temperature difference between the electrodes and electrolytes was insignificant
(0.56 K). The fluid temperature in the flow channels is shown in
Fig. 13. The outlet air and fuel temperatures were found to be
1314 K and 1298 K, respectively. It was evident that the greater
temperature gradient of the air stream resulted from the heat of
cathode half-cell reaction.
4.2. Nominal operating condition
After the steady-state analysis was completed, the nominal
operating parameters were selected for the time-dependent simulation. The nominal operating condition was used as the initial
condition for the dynamic model. Selecting the operating condition for the SOFC was often not a trivial process. To achieve
the maximum power output, many trade-offs were involved.
From the current-voltage characteristics, the maximum power
can be supplied by a fuel cell in a medium to high voltage range.
According to Aguiar et al. (2005), SOFC was normally designed
to operate within a voltage range of 0.60–0.70 V, although a
higher or lower voltage was acceptable. From the steady-state
model validation, it was observed that the predicted cell performance for 49% hydrogen fuel contained the least discrepancy
when compared with the literature data. The model was able
to predict acceptable cell voltages in the current density range
of 0.2–1.0 A/cm2 . To operate the SOFC within the designed
voltage range, the operating current density of 0.80 A/cm2 was
chosen. This current density corresponded to the cell voltage of
0.743 V. Therefore, 49% hydrogen fuel and a load current density of 0.80 A/cm2 were chosen as a nominal operating condition
in the dynamic SOFC model.
In transient operations, the SOFC were often subjected to
sudden changes in the load resistance, which resulted in variable power demand. This step change in the load current was
simulated in the dynamic model by using a step function. The
dynamic response of the cell performance was then investigated.
Also, the effects of varying the molar fraction in hydrogen fuel
was simulated. By doing so, it was determined if the voltage
could be maintained constant in the presence of load changes by
varying the fuel composition.
4.3. Dynamic modelling results
4.3.1. Step changes in load current density
Positive and negative step changes with different magnitude
were made to the load current and the dynamic SOFC responses
are shown in Fig. 14. The load current density was varied from
0.80 A/cm2 to 0.90 A/cm2 , 0.85 A/cm2 and 0.70 A/cm2 . The
inlet hydrogen concentration was maintained at the nominal
value of 49%. The step changes in the load current density
was introduced at 10 s. The temperatures shown were obtained
from the average temperature over the cathode–electrolyte interface where maximum temperature occurred. It was observed
that the voltage responded immediately to the change in load
demand according to Ohm’s law. In Fig. 14(b), a small overshoot in the voltage response was observed after the load
current was increased from 0.80 A/cm2 to 0.90 A/cm2 . This
overshoot was likely a result of a numerical error caused by
a discontinuity in time. Small dynamic effects were observed
and the response time for the output voltages to reached new
steady-states were approximately 330 s. The dynamic response
provided the steady-state gain information which was used to
develop a simplified dynamic model. The gain, KL was calculated from the change in the output voltage with respect to the
change in the load current at the final steady-state.
KL =
Fig. 13. Fluid temperature in the gas channels for 49% H2 fuel at 0.80 A/cm2 .
V
Jload
(37)
The steady-state gains, KL , from each load step changes are
summarized in Table 3. It was observed that the gains were consistent for the positive step changes in the load current. However,
the gain from the negative step change was approximately 10%
lower. The slight inconsistency in the steady-state gains indicated that the effect of load change on the output voltage was
nonlinear in this operating region.
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
2375
Fig. 14. Model output responses to step changes in load current density.
Table 3
Steady-state gains in the output voltages with respect to the load step changes
Final load
current (A/cm2 )
Final voltage (V)
Steady-state gain
(KL , cm2 )
0.90
0.85
0.70
0.711
0.728
0.770
−0.315
−0.302
−0.271
In Fig. 14(c), it was observed that the solid temperature
had the largest response time of approximately 400 s. The cell
temperature had a substantial effect in the transient operation
of SOFC. Although the overall voltages were not significantly
influenced by the temperature distribution, the material stresses
could potentially be a problem. The largest temperature increase
of 36 K was obtained from the load change from 0.80 A/cm2 to
0.90 A/cm2 . At such temperature gradient, stresses would likely
2376
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
be developed. A complete thermal stress analysis was required
to investigate the effect of temperature gradient on the material
stresses.
Fig. 14(d–f) present the responses of the outlet species flux
to load step changes. By increasing the load current, the reactant
utilization was increased. This was observed in the concentration profiles of the reactants in the presence of the positive load
changes. As the load current was increased, more hydrogen and
oxygen were consumed and vice versa. Although, the concentrations changed instantaneously, some dynamic effects were
observed.
4.3.2. Step changes in hydrogen molar fraction
Fig. 15 presents the dynamic responses of the outlet gas
to step changes in the inlet hydrogen concentration from 49%
to 60%, 55% and 38%. The load current density was kept at
Fig. 15. Model output responses to step changes in the inlet hydrogen concentration.
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
2377
Table 4
Steady-state gains in the output voltages with respect to the changes in the inlet
hydrogen compositions
Final mol% of
hydrogen (%)
Final voltage (V)
Steady-state
gain (KP , V/%)
60
55
38
0.780
0.765
0.675
0.334
0.365
0.622
its nominal value of 0.80 A/cm2 . The step tests in the hydrogen molar fraction were introduced at 10 s. The temperature
responses were obtained from the overall solid temperature at
the cathode–electrolyte interface. When the hydrogen concentrations were step changed, the sudden changes in the voltage
were observed in Fig. 15(b). The dynamic effects in the voltage changes were unnoticeable. The steady-state gain, KP , was
calculated for the change in the cell voltage with respect to the
change in hydrogen molar fraction.
KP =
V
xH2
(38)
A summary of the steady-state gains, KP , is provided in Table 4.
The gains for the positive step changes in hydrogen concentration were consistently in agreement with one another. However,
the negative step change in hydrogen produced a larger gain,
twice the magnitude of those from the positive step changes.
This was indicative that nonlinear effects were present around
operating condition. For control design purpose, the output voltage could be difficult to control in this region with low hydrogen
molar fraction.
In Fig. 15(c), the response time of the temperature change
of approximately 400 s was observed in all cases. By increasing the hydrogen content, a lower temperature was observed.
This could be attributed to the change in the activation overpotentials shown in Fig. 16. It was seen that the dynamic effect
of hydrogen concentration change was more pronounced on the
cathode overpotential than the anode overpotential. Initially, the
overshoot in the cathode activation overpotential was observed
when the change in the hydrogen content was introduced. However, the cathode activation overpotential then decreased below
the original value as the new steady-state was obtained. The
heat sources along the electrode–electrolyte boundaries were
calculated from the entropic (reversible) and the activation (irreversible) heat effects. Since the current was maintained constant,
the change in the entropic heat became less significant and the
heat source was more dependent on the activation overpotential
term. When both of the anode and cathode activation overpotentials were reduced, less irreversible heat effect was generated and
the temperature was lowered as a result. The dynamic responses
of the outlet species flux to changes in hydrogen concentrations are illustrated through Fig. 15(d–f). The dynamic effects
were not observed. However, overshoots in the outlet water mass
flux were observed right after step changes were introduced.
These overshoots could be explained by the numerical errors,
which were generated by the discontinuity in time when the
step changes were introduced. By simulating the dynamic model
Fig. 16. Time responses of the activation overpotentials to step changes in inlet
hydrogen concentration.
using a smaller time increment, these numerical errors could be
eliminated.
The simulated voltages from the dynamic model were validated with the interpolated voltages from Keegan et al. (2002).
Using linear interpolation on the performance curve shown in
Fig. 4, the voltages were determined for the fuel with hydrogen content of 38%, 55% and 60%. At the load current of
0.80 A/cm2 , the percent differences between the simulated and
experimental results were found to be 2.9%, 3.6% and 4.5%,
respectively, for 38%, 55% and 60% hydrogen. Overall, the
results were in agreement with the experimental data and the
dynamic model produced physically reasonable results. These
dynamic responses provided useful information on the dynamic
characteristics of the SOFC which could be used for the process
control.
5. Process control of SOFC
In practice, SOFC was often subjected to load changes
which resulted in voltage drops. Therefore, the load current
was accounted for as a disturbance to the SOFC system. It was
observed that the cell voltage was increased by increasing the
composition of hydrogen in the fuel. Based on these findings, the
control objective was proposed to maintain a constant voltage
despite of load changes by manipulating hydrogen concentration in the fuel. The controller design was carried out on the
2378
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 17. Open-loop and closed-loop feedback control diagram in MATLAB Simulink.
simplified dynamic models which were capable of representing
the main dynamic properties of the system.
5.1. Low-order dynamic model
In this section, first-order transfer functions were derived
from the dynamic step responses of the SOFC to represent
the relationship between the output voltage, load current and
fuel composition. The following Laplace transfer functions were
defined as process models for the output voltage with respect to
the input variables and the disturbance, which were the hydrogen
content and the load current, respectively.
KP
KL
y(s) =
u(s) +
d(s)
(39)
τP s + 1
τL s + 1
Here, y was the output voltage, u was the hydrogen content in
the fuel and d was the load disturbance. The process and disturbance gains, KP and KL , were the steady-state gains introduced
in Section 4. The parameters τP and τL were the time constants of
the process and the disturbance, respectively. These parameters
in the transfer function model can be derived from the dynamic
step responses. To determine the process and disturbance gains
for the simplified model, the steady-state gains were selected
from Tables 3 and 4. It was observed that the nonlinear effect
of changes in the inlet hydrogen concentration on the output
voltage was more prominent in the low concentration region.
It was difficult to control the voltage within this region since
the nonlinear effect could not be accurately accounted for in
the first-order transfer function model. For the purpose of control simulation, the steady-state gain of 0.334 V/% was chosen
for KP . This was the gain corresponding to the change in the
hydrogen content from 49% to 60%. The steady-state gain of
the voltage with respect to the load current of −0.315 cm2
was selected for KL .
The process time constant represented the dynamic component of the output voltage response. It was observed that
the output voltage responded to the changes in the hydrogen
content and load current instantaneously. Since the dynamic
components in the output responses were negligible, the process and disturbance transfer functions could be developed
as gain-only models. However, the value of τP and τI were
taken as 0.1 s to simulate various controller settings for the
first-order transfer functions. These time constants were sufficiently small to provide an instantaneous voltage response to
step changes. Additionally, they allowed for the dynamics of the
controller responses to be investigated. The nominal operating
condition of these transfer function models were the same as
that specified in the previous section.
5.2. Feedback control
Three basic modes of feedback control were proportional
(P), integral (I) and derivative (D) control. According to the
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
2379
PID control algorithm, the controller output was the process
input, u, which was calculated from the error, e, in the following
relationship
1
(40)
+ τD s e(s)
u(s) = Kc 1 +
τI s
Here, e was the difference between the actual output and its
set-point value. The controller tuning parameters, Kc , τI and
τD were the controller gain, integral time and derivative time,
respectively. They each represented the proportional, integral
and derivative actions in the controller accordingly. Controllers
with P-only and PI settings were implemented in the voltage
control-loop. The derivative term was omitted due to the lack of
dynamic effects in the voltage responses.
The voltage controller for the SOFC system was implemented
in MATLAB Simulink (MathWorks, 2002). The Simulink diagram of the open-loop process and the closed-loop feedback
control is shown in Fig. 17.
5.2.1. Proportional controller
The closed-loop voltage control simulation was first subjected to various proportional controller settings. The step
change in load current from 0.80 A/cm2 to 0.90 A/cm2 was
introduced at 10 s. The set-point voltage was specified at
0.743 V, which was the initial voltage for the SOFC system
operating with 49% hydrogen fuel and the load current of
0.80 A/cm2 . The closed-loop voltage responses and the controller output responses obtained from various proportional
control settings are shown in Fig. 18. The controller parameters were selected to investigate the control effects on the
closed-loop system. They were not comprehensively tuned to
achieve the optimum controller performance. From Fig. 18(a),
it was observed that the uncontrolled (open-loop) voltage
dropped instantaneously after the change in the load current
was introduced. With the controller, the output voltage was
brought closer to the desired voltage. However, offsets between
the steady-state and the set-point voltages were observed.
This was the expected output response from the process with
proportional control. In the P-only control, the controller output was calculated from the product of the controller gain,
Kc and the offset, e. Therefore, the presence of the offset
was always required to generate the output for the P-only
controller.
By increasing the controller gain, the offset was reduced and
faster response to load change was obtained. In proportional control, a large value of Kc was required to achieve perfect control.
However, this also required a high controller effort. Generally,
the P-only control yielded steady-state errors that occurred after
a change in the set-point or the disturbance. This offset can
be eliminated by incorporating the integral action, τI , with the
proportional controller.
5.2.2. PI controller
The proportional plus integral (PI) controllers were implemented in the voltage control-loop. The step changes in the
load current from 0.80 A/cm2 to 0.90 A/cm2 at 10 s were
simulated. The voltage responses and the controller output
Fig. 18. Closed-loop proportional-control responses to the load step change
from 0.80 to 0.90 A/cm2 .
responses for various PI controller settings are presented
in Fig. 19. With the integral action, the steady-state offsets were eliminated and the desired set-point voltage was
obtained. The dynamic voltage responses were reflected by
the controller responses of the hydrogen molar fractions. Slow
responses from the controller with lower integral time were
observed. A robust control was obtained for the PI controller
setting with a small controller gain (Kc ) and a large integral time (τI ). It was observed that the controller settings
of Kc = 1 and τI = 10 yielded the most robust controller
performance.
5.2.3. Disturbance rejection
The PI controller with the controller gain of 1 and the
integral time of 10 s was used to maintain the output voltage
in the control-loop under various load disturbances. At 10 s,
the load disturbance was changed from its nominal value of
0.80 A/cm2 to 0.85 A/cm2 , 0.70 A/cm2 and 0.65 A/cm2 . The
voltage responses and the controller output responses of the inlet
hydrogen content are shown in Fig. 20. After the load disturbances were introduced, the output voltages increased for the
negative load changes and vice versa. The PI controller successfully restored the output voltage to the desired set-point
value after approximately 2 s. Therefore, the PI controller gave
a satisfactory performance in rejecting the load disturbances.
2380
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
Fig. 19. Closed-loop PI-control responses to the load step change from 0.80 to
0.90 A/cm2 .
In Fig. 20(c), it was observed that the PI controller responded
to changes in the load disturbance by manipulating the controller output, i.e. the inlet hydrogen concentrations, such that
the set-point value of the output voltage was restored. For a positive change, the inlet hydrogen concentration was increased to
obtained the desired output voltage. As seen from the figures,
a range of hydrogen concentration of 35–54% was required to
maintain the voltage of 0.743 V when the SOFC was subjected
to the load current range of 0.65–0.80 A/cm2 . The feedback PI
controller was able to to maintain a constant SOFC voltage for
small changes in the load current. For the case where significant
dynamic effects were observed, the presence of the derivative
control action often improved the settling time of the system. It
was demonstrated that the low-order dynamic models developed
from the physically based model allowed for the implementation of controller design without involving a significant amount
of computational effort. A low-order model provided a useful
tool to investigate the effect of the output response when a small
change was applied to the input variables. However, the simplified models must be used with caution when representing highly
non-linear process such as the SOFC. Since the low-order models were derived under a specific operating range, the predicted
cell performance for a different operating condition would be
less accurate. A new simplified model should be derived if there
was a change in the nominal operating condition.
Fig. 20. Closed-loop responses under various load changes with the PI controller
settings: Kc = 1, τI = 10 s.
6. Conclusion
In this article, a 3D dynamic model of an anode-supported
planar SOFC was presented. The model was derived from the
partial differential equations representing the conservation laws
of charges, mass, momentum and energy. The steady-state cell
performance curve was qualitatively compared with the experimental data from the literature. Overall, the simulation results
agreed with the experimental data despite the difference in SOFC
geometry and model parameter error. The steady-state simulation showed that the cell performance was strongly dependent on
the solid temperature. The mass diffusion limitation contributed
to voltage loss at high current density, whereas the kinetic limi-
A. Chaisantikulwat et al. / Computers and Chemical Engineering 32 (2008) 2365–2381
tation of the electrode reactions were responsible for the voltage
loss at low current density.
A nominal operating condition was chosen such that it
became the initial condition for the dynamic simulations. Step
responses were obtained from the step changes in the system
input and disturbance around the nominal operating condition.
The following observations were noted:
• A stable controller was implemented. The errors in the model
were compensated by this feedback controller.
• A settling time for the temperature of approximately 400 s was
reported, whereas the dynamic effects of the output voltage
and mass diffusion were substantially smaller.
• For a step change of small magnitude, the main dynamic properties of the SOFC were captured in the derived first-order
transfer function models.
• P-only and PI controllers were implemented in a voltage feedback control-loop using the information from the dynamic
step responses.
• In the event of load disturbance, the controller maintained a
constant output voltage by adjusting the hydrogen content in
the fuel source.
The derived low-order dynamic SOFC model could be used to
assess the controller’s performance at other operating conditions
without much computer effort. However, if the operating condition significantly deviated from the selected nominal value, the
simplified model would likely produce larger error. The control
system of a SOFC presented in this paper focused on maintaining a constant voltage by manipulating hydrogen concentration
in the fuel. Since temperature also played an important role in
the performance and failure of the fuel cell, the present work
could be extended to take into considerations thermal gradients
in the SOFC. By identifying a suitable temperature control strategy, material stresses could be maintained within an acceptable
range.
Acknowledgements
This research was made possible in part by funding from the
Alberta Energy and Research Institute (AERI) and the Depart-
2381
ment of Chemical and Materials Engineering at the University
of Alberta.
References
Ackmann, T., de Haart, L., Lehnert, W., & Stolten, D. (2003). Modeling of
mass and heat transport in planar substrate type SOFCs. Journal of the
Electrochemical Society, 150(6), A783–A789.
Aguiar, P., Adjimana, C., & Brandon, N. (2005). Anode-supported intermediate
temperature direct internal reforming solid oxide fuel cell. II: Model-based
dynamic performance and control. Journal of Power Sources, 147, 136–147.
Bird, R., Stewart, W., & Lightfoot, E. (1960). Transport phenomena. New York:
John Wiley & Son.
Chan, S., Chen, X., & Khor, K. (2004). Cathode micromodel of solid oxide fuel
cell. Journal of the Electrochemical Society, 151(1), A164–A172.
Chen, E. (2003). Fuel cell technology handbook (first ed.). Boca Raton: CRC
Press.
Chyu, M. (June 2005). Numerical modeling of transport phenomena in solid
oxide fuel cells. In 2005 Taiwan Solid Oxide Fuel Cell Symposium.
COMSOL. (2004). Chemical Engineering Module Users Guide.
COMSOL. (2005). COMSOL multiphysics (COMSOL 3.2 ed.). COMSOL.
Costamagna, P., & Honegger, K. (1998). Modeling of solid oxide heat exchanger
integrated stacks and simulation at high fuel utilization. Journal of the Electrochemical Society, 145(11), 3995–4007.
Ferguson, J., Fiard, J., & Herbin, R. (1996). Three-dimensional numerical simulation for various geometries of solid oxide fuel cells. Journal of Power
Sources, 58, 109–222.
Haynes, C. (2002). Simulating process settings for unslaved SOFC response to
increase in load demand. Journal of Power Sources, 109, 365–376.
Keegan, K., Khaleel, M., Chick, L., Recknagle, K., Simner, S., & Deibler, J.
(2002). Analysis of a planar solid oxide fuel cell based automotive auxiliary
power unit. SAE Technical Paper Series 2002–01-0413.
MathWorks, T. (2002). MATLAB 6. 5 (R13). The MathWorks, Inc.
Stiller, C., Thorud, B., Bolland, O., Kandepu, R., & Imsland, L. (2006). Control
strategy for a solid oxide fuel cell and gas turbine hybrid system. Journal of
Power Sources, 158, 303–315.
Thorud, B., Bolland, O., & Kvamsdal, H. (September 2002). Modelling and
simulation of transient behaviour of SOFC. In Symposium on Polymer Fuel
Cells.
VanderSteen, J., Kenney, B., Pharoah, J., & Karan, K. (September 2004). Mathematical modelling of the transport phenomena and the chemical/electrical
reactions in solid oxide fuel cells: A Review. In Canadian Hydrogen and
Fuel Cells Conference.
Williford, R., Chick, L., Maupin, G., Simner, S., & Stevenson, J. (2003).
Diffusion limitations in the porous anodes of SOFCs. Journal of the Electrochemical Society, 150(8), A1067–A1072.
Zhu, H., & Kee, R. (2003). A general mathematical model for analyzing the
performance of fuel-cell membrane-electrode assemblies. Journal of Power
Sources, 117, 61–74.