Electric Power Transmission and Distribution Solutions of exercise 3
advertisement

Electric Power Transmission and Distribution
Solutions of exercise 3
Prof. Göran Andersson
ETH Zurich
Autumn term 2009
Exercise 1
a) Surge impedances
In general, the surge impedance of a line is
R + jωL
ZW =
G + jωC (1)
where ω = 2πf = 2π · 50 = 314.16 rad/s. For the overhead line, we obtain
0.12 + j · 314.16 · 10−3
= 322.19−j56.79 = 327.16∠−10◦ Ω
Z OL
W =
0.05 · 10−6 + j · 314.16 · 10−8
(2)
The surge impedance of the cable is much lower:
0.1 + j · 314.16 · 0.3 · 10−3
C
= 43.08 − j18.19 = 46.76∠ − 22.89◦ Ω
ZW =
10−6 + j · 314.16 · 200 · 10−9
(3)
b) Surge impedance loadings
The surge impedance loading is the power, which is transmitted when the
power line is loaded with an impedance equal to its surge impedance. At
nominal voltage at the end of the line, we obtain
S SIL = U · I ∗ = U ·
2
UN
U∗
∗ =
∗
ZW
ZW
(4)
For the overhead line, we obtain a surge impedance loading of
S OL
SIL =
1100002
= 36.42 − j6.42 = 36.99∠ − 10◦ MVA
322.19 + j56.79
1
(5)
and for the cable
SC
SIL =
1100002
= 238.37 − j100.65 = 258.75∠ − 22.89◦ MVA (6)
43.08 + j18.19
The nominal powers of the two √
conductors are calculated as product of the
phase to phase voltage and the 3-fold phase current:
√
SN = UN · 3 · IN
(7)
√
OL
= 110000 · 3 · 330 = 62.87 MVA
(8)
SN
√
C
(9)
SN = 110000 · 3 · 290 = 55.25 MVA
The comparison shows:
• The nominal power of the overhead line is much higher than the surge
impedance loading.
• The nominal power of the cable is much lower than the surge impedance
loading.
c) Unnecessary data
We do not need to know the line length for the considerations above. Both
the surge impedance and the surge impedance loading of the line are independent from the line length.
Exercise 2
a) Maximum transferable power
The power transmitted over a purely inductive line can be calculated with
the following equation (see lecture notes p. 122):
p=
uGi · uN
sin δ
xtot
(10)
where the transmission angle δ corresponds to the angle between the two
voltage phasors:
(11)
δ = (uGi , uN )
For δ = 90◦ , sin δ equals 1 and the transmitted power becomes maximal.
Both voltages are controlled to a value of 1 p.u. Thus, the product of the
absolute values of the voltages is uGi · uN = 1. The total reactance between
”
the voltage phasors” is
xtot = xS + xT + xL = 1.00 + 0.10 + 2.00 = 3.10 p.u.
2
(12)
Hence, the generator can supply a maximum active power of
pmax =
uGi · uN
1
= 0.3226 p.u.
=
xtot
3.10
(13)
to the grid. When this power is transmitted, the transmission angle is 90◦
and there is no steady state stability margin (see lecture notes p. 123).
b) Line reactance for a steady state stability margin of 30%
When the reactance of the line is reduced, the transmitted (and maximally
transferable) power increases according to equation (10):
p=
uGi · uN
sin δ
xS + xT + xL
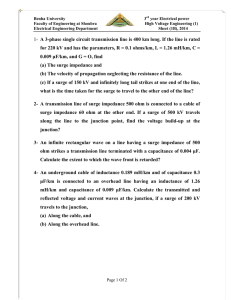
This relationship is illustrated in figure 1. The maximum power pmax is
transmitted at δ = 90◦ . By a reduction of the reactance from xL to xL , the
transferable power increases from pmax to pmax .
p in p.u.
p'max
a'
pmax
x'L
0.3 p'max
a
xL
0.7 p'max
0
0
d'
90
180
d in °
Figure 1: Power p as function of the transmission angle δ. Operating point a
with line reactance xL , transmission angle δ = 90◦ , stability margin 0%; operating point a with line reactance xL , transmission angle δ < 90◦ , stability
margin 30%.
For the transmission of pmax , a steady state stability margin of 30% has
to be maintained. This means that the power pmax has to be 30% lower than
the maximum value pmax (see definition lecture notes p. 121). This condition
is shown in figure 1. We obtain:
0.7 · pmax = pmax
1
1
=
0.7 ·
xS + xT + xL
xS + xT + xL
3
(14)
(15)
and from that, the new” reactance of the overhead line becomes
”
xL = 0.7 · (xS + xT + xL ) − xS − xT
= 0.7 · (1.00 + 0.10 + 2.00) − 1.10
= 1.07 p.u.
(16)
The reactance of the line would almost have to be halved to maintain the
demanded stability margin.
c) Exchange of reactive power
When transmitting the maximum active power, we obtain for the reactive
power exchange of generator and grid - for each of them in direction of the
line (equation (6.54) on p. 122 in the lecture notes):
qG (xL ) =
u2Gi
uGi · uN
1
= 0.3226 p.u.
−
cos δ =
xtot
xtot 3.10
(17)
qN (xL ) =
u2N
uN · uGi
1
= 0.3226 p.u.
−
cos(−δ) =
xtot
xtot 3.10
(18)
0
0
With reduced line reactance xL (and thus reduced transmission angle δ ) we
obtain
qG xL =
=
qN xL =
=
u2Gi
uGi · uN
−
cos δ
xtot
xtot
1
[1 − cos (arcsin(0.7))] = 0.1317 p.u.
2.17
uN · uGi
u2N
−
cos(−δ )
xtot
xtot
1
[1 − cos (− arcsin(0.7))] = 0.1317 p.u.
2.17
(19)
(20)
We note that, while transmitting the same active power in both cases, less
reactive power is exchanged in the more stable operating point a than in
the operating point a.
Exercise 3
The voltage drop along a line is explained in chapter 6.5 of the lecture notes
(from p. 116).
4
a) Exact calculation
The current at the end of the line is
I2 =
S ∗2
U ∗2
(= I 1 )
(21)
Kirchhoff’s voltage law gives
U 1 − Z I2 − U 2 = 0
(22)
From these two relations, we obtain an implicit expression for the voltage
at the end of the line:
S∗
(23)
U 2 = U 1 − Z · 2∗
U2
We cannot directly solve this equation for U 2 in an analytic way. Therefore,
we proceed in two steps:
1. At first, we form a quadratic equation for U2 = |U 2 |.
2. We then calculate the corresponding angle ϕ2 = (U 2 ).
By converting equation (23), we can develop an equation for the absolute
value (see equation (6.36) in the lecture notes):
RP2 + XQ2
XP2 − RQ2
U2 +
+j
(24)
U1 =
U2
U2
U12 =
A
B
2 2
RP2 + XQ2
XP2 − RQ2
U2 +
+
U2
U2
(25)
where U 2 = U2 has been put in the real axis. From this relation, we can
derive a quadratic equation for U22 :
(26)
U24 + 2A − U12 U22 + A2 + B 2 = 0
As solutions we obtain
2
2
2A − U12
2A
−
U
1,2
1
±
− A2 − B 2
U2 = −
2
4
(27)
With the constants
A = RP2 + XQ2 = 10 · 200 · 106 + 100 · 70 · 106 = 9 · 109
6
6
(28)
10
B = XP2 − RQ2 = 100 · 200 · 10 − 10 · 70 · 10 = 1.93 · 10
(29)
we obtain the two solutions
U21 = 372.47 kV
U22 = 57.17 kV
5
(30)
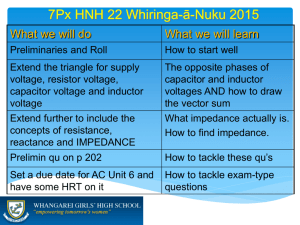
As shown in figure 2, the power S 2 can be transmitted at two voltage levels.
Therefore, we obtain two solutions for the voltage at the end of the line. U21
represents the solution of the upper branch of the P -U -curve, U22 is a point
on the lower branch.
U2 in kV
U21
U22
0
0
200
P2 in MW
Figure 2: P -U -curve. The active power P2 can be transmitted at two different
voltage levels.
The phase difference between U 1 and U 2 can be calculated from equation (24):
Δϕ12 = (U 1 , U 2 ) = ϕ1 − ϕ2 = arctan
{U 1 }
− ϕ2
{U 1 }
(31)
For the equations above, U 2 has been put in the real axis, i.e. ϕ2 = 0.
According to the formulation of the exercise, U 1 is in the real axis. We solve
this problem by setting ϕ2 = −ϕ1 and ϕ1 = 0. We obtain the angle of
voltage U 2 as
B/U2
U2 + A/U2
1.93 · 1010 /372470
= −7.44◦
= − arctan
372470 + (9 · 109 ) /372470
1.93 · 1010 /57170
= −57.56◦
= − arctan
57170 + (9 · 109 ) /57170
ϕ2 = − arctan
(32)
ϕ12
(33)
ϕ22
(34)
b) Simplification R = 0
In this case, the constants correspond to
A = XQ2 = 100 · 70 · 106 = 7 · 109
6
10
B = XP2 = 100 · 200 · 10 = 2 · 10
6
(35)
(36)
As solutions for the quadratic equations, we obtain
U 12 = 377.96∠ − 7.60◦ kV
(37)
U 22 = 56.06∠ − 63.11◦ kV
c) Simplifications R = 0 and P2 = 0
In this case, we obtain with
the solutions
A = XQ2 = 100 · 70 · 106 = 7 · 109
(38)
B = 0
(39)
U 12 = 381.66∠0◦ kV
U 22 = 18.34∠0◦ kV
(40)
Alternative way of solving
The equation (23) for U 2 can be numerically solved with the Gauss method:
• We fix an initial value for U 2 and insert it in the right side of equation (23). One usually uses as initial value the voltage at the beginning
of the line.
• In this way, we obtain a new value for U 2 . We insert this value again
in the right side of the equation.
• We repeat this process, i.e. we iterate, until U 2 changes only slightly
(i.e. U 2 converges to a stable end value).
The closer the initial value for U 2 is to the solution, the faster (i.e. with
less iterations) we will converge to it. We begin with the initial value U 12 =
400∠0◦ kV and continue to insert the result in the right part of equation (23)
until the amplitude of U 2 changes by less than 0.1%:
Iteration
1
2
3
4
Inserted value in kV
400∠0◦
380.57∠ − 7.28◦
373.12∠ − 7.28◦
372.65∠ − 7.44◦
Result in kV
380.57∠ − 7.28◦
373.12∠ − 7.28◦
372.65∠ − 7.44◦
372.48∠ − 7.44◦
Change in %
4.86
1.96
0.13
0.04
The calculation converges after four iterations. The final result is U 2 =
372.48∠ − 7.44◦ kV. For the two simplified cases b) and c), we obtain U 2 =
377.97∠ − 7.59◦ kV and U 2 = 381.66∠0◦ kV.
7
Exercise 4
a) Elements of the Π equivalent circuit (with exact equations)
The corresponding equations can be found on p. 100 of the lecture notes:
(41)
Z l = Z W sinh γl
γl
Yq
1
=
(42)
tanh
2
ZW
2
where Z W is the surge impedance and γ the propagation constant of the
line. We can calculate both quantities from the distributed line parameters.
The surge impedance is
R + jωL
0.12 + j · 314.16 · 10−3
=
= 321.75 − j59.36 Ω (43)
ZW =
G + jωC 0 + j · 314.16 · 10−8
where ω = 2πf = 2π · 50 = 314.16 rad/s. The propagation constant results
in
(R + jωL ) (G + jωC )
(44)
γ =
(0.12 + j · 314.16 · 10−3 ) (0 + j · 314.16 · 10−8 )
(45)
=
= 0.0001865 + j0.0010108 Np/km
(46)
The elements of the Π equivalent circuit thus result in
Z l = (321.75 − j59.36) · sinh [(0.0001865 + j0.0010108) · 300]
= 34.94 + j93.06 Ω
Yq
2
(47)
1
(0.0001865 + j0.0010108) · 300
=
· tanh
321.75 − j59.36
2
= 1.364 + j474.75 μS
(48)
b) Elements of the Π equivalent circuit (with simplified equations)
For the case |γl| 1, we can calculate the elements of the equivalent circuit
in a simplified way. First of all, we check this condition:
|γl| = |(0.0001865 + j0.0010108) · 300| = 0.30836
(49)
We compare this value with table 5.3 and figure 5.27 on p. 103 in the lecture
notes and note that the approximation should not lead to great deviations
in this case.
8
For the elements of the equivalent circuit, we obtain
Z l = R + jωL l = 0.12 + j · 314.16 · 10−3 · 300
= 36 + j94.25 Ω
Yq
2
l
300
= 0 + j · 314.16 · 10−8 ·
2
2
= 0 + j471.24 μS
=
(50)
G + jωC (51)
c) Ohmic component in the shunt admittance
We note that in case a) the shunt admittance contains an ohmic component
although we assumed that G = 0:
(52)
Y q = 2.728 μS
a)
Zl
Yq
2
U1
Il
Yq
2
U2
l
Z'l
U1
Y'q
2
b)
I'l
I'l
Y'q
2
Um
l/2
Z'l
Y'q
2
Y'q
2
U2
l/2
Figure 3: Model of a line a) with one Π element, b) with two Π elements.
We will now explain this fact. We consider the model in figure 3 a). The
line with the length l is modelled with one Π element. In order to explain
the presence of an ohmic component in the shunt element, we assume that
9
the voltage at the beginning of the line is the same as at the end. In this
case, no current flows over the series element Z l :
U1 = U2 = U
The losses in the shunt elements
Yq
2
⇒ Il = 0
(53)
Y ∗q
= |U |2 Y ∗q
2
(54)
are
ΔP + jΔQ = 2 · |U |2
The same line can also be modelled with two Π elements of the length
l/2. We consider figure 3 b) and calculate the losses in this circuit. Also in
this case, we assume for the voltages that U 1 = U 2 = U .
ΔP + jΔQ = |U |2 · Y q∗ + |U m |2 · Y q∗ + 2 · Z l · |I l |2
(55)
In this case, there is a current in the series impedances and it generates
ohmic losses there:
I l = 0
⇒ ΔP = 0
(56)
U m = 0
For both models (one/two Π elements) the losses have to be the same:
ΔP = ΔP = 0
(57)
From (54) and (57) it becomes clear that Y q has to have an ohmic component:
(58)
{Y q } = 0
10