WINTER– 14 EXAMINATION Subject Code: 12283 Model
advertisement

MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
Subject Code: 12283
WINTER– 14 EXAMINATION
Model Answer
Page No: ____/ N
Important Instructions to examiners:
1) The answers should be examined by key words and not as word-to-word as given in the
model answer scheme.
2) The model answer and the answer written by candidate may vary but the examiner may try
to assess the understanding level of the candidate.
3) The language errors such as grammatical, spelling errors should not be given more
Importance (Not applicable for subject English and Communication Skills.
4) While assessing figures, examiner may give credit for principal components indicated in the
figure. The figures drawn by candidate and model answer may vary. The examiner may give credit for any
equivalent figure drawn.
5) Credits may be given step wise for numerical problems. In some cases, the assumed constant
values may vary and there may be some difference in the candidate’s answers and model answer.
6) In case of some questions credit may be given by judgement on part of examiner of relevant answer based on
candidate’s understanding.
7) For programming language papers, credit may be given to any other program based on equivalent concept.
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
Q
Answer
Remark
No:
Total
marks
1.(A) Atte mpt any Three of the following:
(a)
State classification of drives giving example of each category.
4 marks 4
Ans : Drives are classified into five categories and with their example are as given below.
for
1) According to mode of operation
Continuous duty drives
Short time duty drives
Intermittent duty drives
2) According to Means of Control
Manual
Semi-automatic
Automatic
3) According to Number of machines
Individual drive
Group drive
Multi- motor drive
4) According Dynamics and Transients
Uncontrolled transient period
Controlled transient period
5) According to Methods of Speed of Control
Reversible and non-reversible uncontrolled constant speed
Reversible and non-reversible step speed control
Variable position control
Reversible and non-reversible smooth speed control
classifi
cation
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
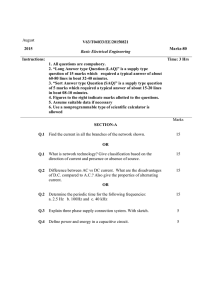
1.(A) Explain with diagram four quadrant operation of hoist.
(b)
Diagram:
Ope ration:
* A hoist consists of a rope wound on a drum coupled to a motor shaft. One end of a rope
is tied to a cage which is used for transporting material. Other end of the rope has a counter
weight.
* Weight of the counter weight chosen higher than the weight of an empty case but lower
than a fully loaded cage.
2 mark
for
diag. &
2 marks
for
operati
on
* Load torque TL2 in quadrants I & IV represent speed torque characteristics of the loaded
hoist. This torque is the diff. of torques due to loaded hoist & counter weight.
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
* Load torque TL2 in quadrants II & III is the speed-torque characteristics of an empty
hoist. This torque is due to the diff in torque of counter weight & empty hoist. This is –ve
because the counter weight is always higher than the empty cage.
* Quadrant I operation – hoist requires the movement of the cage upward, which
corresponds to the +ve motor speed which is in CCW (counter clockwise) direction. It will
be obtained if motor produce +ve torque in CCW direction equal to TL. Since developed
power is +ve, this is forward motoring operation.
* Quadrant IV ope ration is obtained when a loaded cage is lowered. Since the weight of
the loaded cage is > the counter weight. In order to limit the speed of the cage within a safe
value, motor must produce a +ve torque T = TL2 in anti clockwise direction. Both power
& speed are –ve, drive is in reverse braking.
* Quadrant II is obtained when an empty cage is moved up since a counter weight is
heavier than a empty cage, it is able to pull it up. In order to limit the speed to safety value,
motor must produce braking torque = TL2 in clockwise direction. Since speed is +ve,
developed power is, - ve. It is forward breaking operation.
* Quadrant III – empty cage is lowered since empty cage weight is < counter weight
motor produce a torque in clockwise direction. Since speed is –ve & developed power is
+ve, this is reverse motoring operation.
1.(A) Draw circuit diagram of three – phase semi- converter drive.
4 marks 4
for
(c)
diagra
m
Equivalent circuit of motor are La, Ra and E (back emf).
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
1.(A) With neat circuit diagram explain operation of DC chopper using powe r MOSFET.
(d)
Ope ration :
The chopper controlled circuit produces a rectangular voltage wave form that
drives the power MOSFET. The duty cycle is controlled by the time period of the
control circuit.
When the gate voltage is high the power MOSFET is driven into ohmic range.
Therefore the power MOSFET will function as a closed switch and the load is
2 mark
4
for
diag. &
2 marks
for
operati
on
driven.
When the gate voltage is reduced to zero, MOSFET turns off and the switch is open
due to which the load is disconnected.
1.(B) Atte mpt any ONE of the following:
(a)
Explain how chopper can be used for regenerative braking of the separately excited
d.c. motor.
1. The regenerative braking of DC motor is very useful for saving energy.
2. This method is used when the load on the motor overhauling characteristics as in the
lowering of the cage of a hoist or the downgrade motion of an electric train.
3. Regeneration takes place when back emf Eb becomes greater then the chopper
supply voltage.
4. This happens when the overhauling load acts as a prime mover and so drives the
machine as a generator.
5. Consequently direction of armature current and hence armature torque is reversed
and speed falls until Eb becomes lesser than V.
6. During the slowing down of the motor power is return to the line.
7. This may be used to upgrade and their by relieving the power house.
1 mark
each
for any
of the 6
points
6
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
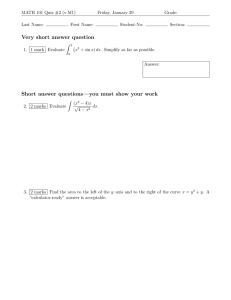
α Controlled circuit
CHOPPER
M
1.(B)
(b)
Classify the choppe rs conside ring their quadrant operation, giving example of each
category.
2 marks 6
for
classifi
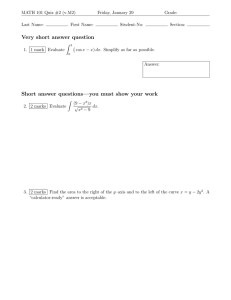
CLASSIFICATION OF CHOPPERS
cation,2
Choppers are classified as follows
marks
for
Class A Chopper (Motoring operation of d.c. motor)
Class B Chopper (Chopper drive of subway train)
Class C Chopper (Machine tools drive)
Class D Chopper (Reversible regenerative dc drive)
Class E Chopper (Washing machine)
diag.,2
marks
for
applicat
ion
Class A
Class B
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
Class C
Class E
Class D
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2.
Atte mpt any FOUR of the following:
(a)
With neat diagram explain speed control of induction motor using stator voltage
2 mark
control method.
for
Circuit Diagram
diag. &
2 marks
for
operati
on
Explanation :
Two SCRs are connected anti parallel.
During the positive half cycle SCR1 is triggered.
The direction of the current in the stator winding is from the top to bottom.
In the negative half cycle SCR1 is turned off and SCR2 is triggered.
The direction of the flow of current in the stator winding is reversed biased.
By varying the firing angles of SCR1 and 2, the magnitude of a.c. voltage across
the stator winding of the motor can be controlled.
This in turn will vary the motor speed.
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2.(b)
With neat diagram, explain the operation of slip energy recovery system method of 2 mark
speed control of induction motor.
for
diag. &
2 marks
for
operati
on
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2.(c)
Diode D1, D2, D3, D4, D5 and D6 acts as a rectifier.
L, C1 and C2 form a pie network filter.
SCRs 1, 2,3,4,5 and 6 act as an inverter.
The firing angle of the inverter can vary the amount of power extracted from rotor
circuit and thus the rotor speed is varied.
The power output of inverter circuit is fed back to the a.c. supply mains and t his
forms a regenerative control.
The system is made closed loop by comparing actual speed and torque and the
desired speed and torque of motor with the help of tachogenerator.
Draw the circuit diagram of chopper control of induction motor drive employing motor
resistance control technique. Explain how the speed is controlled.
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2 marks 4
for
diag. &
2 marks
for
operati
on
Diode D1,D2,D3,D4,D5 and D6 acts as a rectifier.
L,C1 and C2 form a pie network filter.
The chopper is controlled at high frequency and thus connecting and disconnecting the
external Resistance are in the rotor circuit at regular intervals.
Hence the Motor speed can be controlled.
The system is made closed loop by comparing actual speed and torque and the
desired speed and torque of motor with the help of tachogenerator.
2 mark
2.(d)
Explain closed loop ope ration of a drive. State why it is preferred over open loop.
for
diag. &
Block diagram shows the closed loop control operation of an electric drive.
1 marks
PWM circuit controls the speed of the motor.
for
The speed is sensed and a control signal is fed back to control unit.
operati
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
The signals are compared at the power modulator and hence the speed of the motor
on & 1
is stabilized irrespective of the load.
marks
for
differen
ce
Block Diagram of a simple electric drive:
Open-loop control that simply changes the speed and closed- loop control that
reduces the speed variation with load changes of the motor.
Constant speed can be achieved and hence the stability of the drive can be obtained.
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2.(e)
Write basic equation and speed torque characteristics of separately excited motor.
Basic Equation:
VT = Eb + IaRa
Where VT = total voltage applied.
2 marks 4
for
equatio
n&2
marks
charact
Eb = Back emf.
Ia = armature current.
Ra = armature resistance.
Speed torque characteristics of separately excited motor:
eristics
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2(f)
State the transfer function of armature controlled dc motor and explain its stability
2 marks 4
with respect to characteristic equation.
for
transfer
The transfer function from the input armature current to the resulting motor torque
is
functio
n&2
marks
charact
=
eristics
equatio
n
Where,
Tm = Motor torque
Ea = armature input voltage
θ
= Output voltage
The characteristic equation :
) =0
S = 0 or
=0
S=0 & s=
3.
As the poles are on the left hand side of the axis, hence the system is stable.
Attempt any FOUR of the following:
(a)
Draw the circuit diagram of three phase dual converter drive and explain its operation with the
help of waveforms
Ans: Circuit diagram 2 marks, waveform 1 mark and explantion 1 mark
2 marks
Circuit
diagram
, 1 mark
wavefor
m and 1
mark
explanat
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
ion
Waveform:
Explanation: It consists of two 3 phase full converters connected back to back converter1
and converter2 are operated in such a way that the sum of the firing angles is 180 degree.
It has two modes of operation: circulating current mode & non circulating current mode
3. (b) Draw circuit diagram of single phase full converter drive and state the equation for its O/P
voltage.
Ans: circuit diagram 3 marks and o/p voltage 1 mark
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
2 marks
4
Circuit
marks
diagram
, 2 mark
wavefor
m
Output voltage , Vdc = Vm {1+ cosα }/π
3. (c) Explain the equation concept of stability w.r.t characteristic of motor.
Ans: concept of stability 2 marks, characteristic equation 2 marks
2 marks
4
Circuit
marks
diagram
, 2 mark
equatio
n
Concept of stability: The steady state operation takes place when the motor torque
equals the load torque. The steady state operation for a given speed is realised by the
adjustment of steady state motor speed –torque characteristics such that motor and load
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
torque are equal. In the figure when the motor parameters are adjusted to provide
torque speed curve 1, the drive runs at speed Wm1. Speed is changed to Wm2 when the
motor parameters are adjusted to provide speed torque curve 2.
3. (d) Explain how phase locked loop can be used controlling speed control of DC motor.
Ans: diagram 2 marks
2 marks
4
Circuit
marks
diagram
, 2 mark
explanat
ion
Explanation 2 marks:
Two pulse trains i.e reference frequency f i and feedback frequency f o are compared in the
phase detector which produces pulse width modulated output. The pulse width depends
on the difference between the two frequencies. This output is filtered by a low pass filter
to obtain a dc signal and applied as a control voltage to a voltage controlled oscillator.
At steady state both the frequencies become equal and the loop is set to have locked
3. (e) State drive requirements for textile mills.
Ans:
Drive requirements for textile mills:
1. Ginning motors: The speed range should be of 250 to 1450 rpm.
2. Blowers: Three phase induction motors are used. The speed range should be of 1000 to
1500rpm.
3. Cording: For this, three phase induction motor with high starting torque is used.
4. Spinning: It should have smooth acceleration. It should be able to work at high ambient
temperature. It should be able to totally enclosed
4 marks
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
4.(A) Attempt any THREE of the following:
diagram
4
4 marks
(a)
Draw the block diagram of microcontroller based stepper motor control.
Ans:
4.(A) Draw block diagram of microprocessor based DC motor speed control method.
diagram
4 marks
(b)
Ans:
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
any 4
4.(A)
State advantages of microprocessor and microcontroller for dc drive applications.
points
(c)
4 marks
Ans: Advantages :
1.
2.
3.
4.
5.
6.
7.
8.
9.
These are very compact control systems
The processing of speed and angular position is digital, hence it is more accurate.
Less expensive than analog discrete drives
Very high quality of performance
Very high reliability
High precision
These drives are very flexible and adaptable for applications of all types.
High level of sophistication.
Four quadrant operation of drive is easily possible.
This type of control is free from the drifts and parameter variations taking place due
to temperature changes
4
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
4.(A) State the advantages of phase locked loop controlled DC motor drive.
(d)
( B)
Ans: Advantages
4 points
1.
2.
3.
4.
4 marks
Better speed regulation (0.002)
Inexpensive control
economical and simple
PLL control improves the speed of response of drive.
4
Attempt any ONE of the following:
6
(a)
Compare DC drives & AC drives with at least 6 points
6
6 points
Ans:
6 marks
Sr
No
DC drives
AC drives
1
Used to control speed of DC motors
Used to control speed of AC motors
2
Speed is controlled by change in
armature voltage or field current
Speed is controlled by changing the
voltage and frequency
3
Speed of DC series or separately excited
motors can be controlled
Speed of induction or synchronous
motors can be controlled
4
The maximum speed of operation is
limited due to the presence of brushes in
dc motors.
The maximum speed is much higher
that that of dc motors due to
absence of brushes in ac motors
5
The power circuit used to control the
speed is an AC-DC converter using SCR
Power circuit used for speed control
is an inverter.
6
Used in machine tool industry, traction
applications etc
Used in machine tool industry,
textile, traction applications, etc
7
Frequent maintenance needed due to
presence of brushes
Less maintenance needed as the
brushes are absent.
8
Cannot be used for applications in
petroleum or chemical industries as
sparking takes place at the brushes.
Can be used in these industries as
the brushes are absent.
3
(b)
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
Suggest suitable drives used for the following applications and justify your answer.
i) cement mills
ii) sugar mills
Ans: Cement mills
3
marks
Drives used for cement mills are:
6
marks
1. Raw mill drives and Cement mill drives: slip ring induction motors are used because they
have high starting torque and good overload capacity.
2. Kiln drives: DC motors controlled by Ward Leonard method Synchronous motors are used
3. Crusher drives: slip ring induction motors are used because they have high starting torque
and good overload capacity.
4. Blower drives: slip ring induction motors are used with rotor resistance starter because
they have high breakdown torque.
5. Compressor drives: Squirrel cage induction motor is used because they have constant
speed.
Drives used for sugar mills are:
3
marks
1. Centrifuge: The motor used to drive the centrifuge is a variable speed motor like slip
ring induction motor. Regenerative braking is employed. Stator voltage control can be
used.
2. A synchronous motor or converter fed induction motor can also be used for speed
control purposes
5.
Attempt any TWO of the following:
(a)
Explain the equation concept of stability w.r.t characteristic of motor.
Ans: Concept of stability: 4 marks , characteristic equation: 2 marks ,equivalent ckt 2
marks
Concept of stability: The steady state operation takes place when the motor torque
4 marks
8
for dia
&4
marks
for
explanat
ion
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
equals the load torque. The steady state operation for a given speed is realised by the
adjustment of steady state motor speed –torque characteristics such that motor and load
torque are equal. In the figure when the motor parameters are adjusted to provide
torque speed curve 1, the drive runs at speed Wm1. Speed is changed to Wm2 when the
motor parameters are adjusted to provide speed torque curve 2.
separately excited armature controlled DC motor :
In a armature-current controlled motor, the field current f i is held constant, and the armature
current is controlled through the armature voltage a V . In this case, the motor torque increases
linearly with the armature current.
The characteristic equation of separately excited armature controlled DC motor is:
( b)
With neat equivalent circuit, explain the load torque characteristics of separately excited dc
motor.
Ans: Equivalent circuit: 2 marks, characteristics : 2 marks, working: 4 marks
Equivalent circuit:
2
8
marks,
charact
eristics :
2
marks,
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
working
:4
marks,
diag
Separately excited dc motor
Working:
When a separately excited motor is excited by a field current of i f and an armature current of
i a flows in the circuit, the motor develops a back emf and a torque to balance the load torque
at a particular speed. The i f is independent of the i a .Each windings are supplied separately.
Any change in the armature current has no effect on the field current.
Characterisitics:
Equation
or
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
(c)
What are the advantages of converter fed Induction motor?
8 points
Ans:
1.
2.
3.
4.
5.
6.
7.
8.
6.
8 marks
8
marks
Smooth speed control is possible
Soft start and acceleration at constant current torque are possible.
Less noise than motors operated from direct supply
No switching surges and special starting equipment not required even at higher
ratings.
Fewer losses by using PWM inverter, harmonic content can be decreased and torque
pulsations can be avoided.
Single and multi-motor operation is possible using VSI
Regenerative breaking is simple.
Quadrant operation is possible.
Attempt any FOUR of the following:
(a)
State limitations of induction motor.
4 points
4
4 marks
marks
Ans: 4 points 4 marks
1. The efficiency of induction motor varies with speed.
2. In induction motors, the flux and armature (stator) current cannot be controlled
separately, as there is only stator winding and rotor is not accessible for the user.
3. The harmonics of the converter causes heating of the induction motor.
4. Torque pulsations will be observed
(b)
Explain voltage, current and frequency control method for speed control and induction motor.
Ans: circuit diagram/ block diagram is optional 2 marks and explanation 2 marks
Diagram for voltage,current and frequency control method
4
circuit
diagram/
marks
block
diagram is
optional 2
marks and
explanation
2 marks
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
Explanation:
(c)
3 phase a PWM bridge inverter may be used. The circuit uses a transistorized inverter.
They can be replaced by MOSFET’s or IGBT’s.
The signals are shifted by 120 degrees which drive the base of the transistors Q1, Q3 & Q5
and the signals are shifted by 180 degrees which drive the base of the transistors Q4, Q6
& Q2.
The output voltage of the PWM inverter is varied by varying the modulation index.
The output frequency of the PWM inverter is varied by varying the frequency of
modulating signal.
Describe the role of drives in paper mill
Ans: Drives used in paper mills: any 4 points 4 marks
(d)
4
mark
s
Grinding
Wire couch section
Pressing
Dryer
Calendar
Reel section
For these sections, DC motor or AC motor is used. DC motors having Ward
Leonard speed control provide smooth variable speed. These motors are capable
of inching so that it is possible to clean the web. The starting and acceleration of
the sections must be smooth as well as quick
State the requirements of motors used for cranes & hoists.
Ans: any 4 points 4 marks
Requirements of drives used in cranes and hoists:
any 4
points
4
marks
The motion of the crane hook is in all directions.
any 4
points
4
marks
4
mark
s
MAHARAS HTRA S TATE BOARD OF TECHN ICAL EDUC ATION
(Autonomous)
(IS O/IEC - 27001 - 2005 Certified)
__________________________________________________________________________________________________
(e )
The acceleration and retardation must be uniform.
Very low speed is required for accurate positioning
Mechanical braking must be available.
The drive must have high speeds in directions.
Braking of the motor during overhauling must be possible.
Able to work in dusty environment and should handle high ambient temperature.
State advantages of microprocessor and microcontroller for dc drive applications
any 4
points
4
marks
Ans: Advantages : any 4 points 4 marks
These are very compact control systems
The processing of speed and angular position is digital, hence it is more accurate.
Less expensive than analog discrete drives
Very high quality of performance
Very high reliability
High precision
These drives are very flexible and adaptable for applications of all types.
High level of sophistication.
Four quadrant operation of drive is easily possible.
This type of control is free from the drifts and parameter variations taking place
due to temperature changes.
A. Jayalakshmi
(Moderator)
4
mark
s