Parametric modelling of the geometrical ice
advertisement

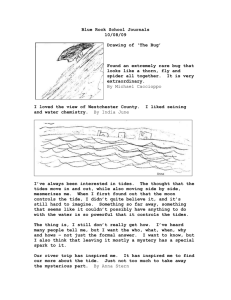
Heinert, M. and Riedel, B. (2007): ————————————————————————————————– Parametric modelling of the geometrical ice-ocean interaction in the Ekstroemisen grounding zone based on short time-series ————————————————————————————————– Geophys. J. Int. 169: 407–420. DOI: 10.1111/j.1365-246X.2007.03364.x Technische Universität Carolo-Wilhelmina zu Braunschweig, Institut für Geodäsie und Photogrammetrie Gaußstraße 22, D-38106 Braunschweig, e-mail: m.heinert@tu-bs.de, b.riedel@tu-bs.de Abstract Due to the ocean tide impact the Ekstroemisen (Ekstroem Ice Shelf, Antarctica) shows at its assumed grounding line still vertical displacements. These can reach amplitudes of five centimetres here. The low tide amplitudes are smaller than the corresponding high tide amplitudes. This indicates that the ice body touches the bedrock during the low tides. Even one kilometre behind the assumed grounding line an elastic feedback of the ice body can be observed. The maximum vertical displacements can reach still one centimetre. These results are based on data collected during the austral summer 1997 in the grounding zone of the Ekstroemisen. This region has been studied by using a combined sensor-field of continuous GPS (Global positioning system), gravimeter and tiltmeter instruments to derive the elastic response of the ice body on ocean tides. The resulting time-series which have to be analysed are biased by outliers, data gaps or complex trend functions. In the case of very short time-series it is nearly impossible to analyse them without assuming hypotheses. It can be shown that standard-algorithms like correlation-functions, different Fourier-transforms or functional regressions are not suitable to solve the parameterization of time series in the region of the grounding zone, where several kinematic and gravimetric processes overlap. After a thorough analysis of these time series with an average length of eight days we managed to homogenize the results of the hybrid and non-simultaneous observations. On the base of non-linear programming we created a set of robust parameters to describe the ice shelf motion in the grounding zone. Key words: Tides, Spectral analysis, Fourier transform, Geodesy, Global Positioning System (GPS), Gravity 1 Introduction fully a system or a sub-system to understand it and its interaction with the surrounding systems. To determine the transport of material, energy or information across the system boundary one has to define or identify this boundary (Riedel 2002). In order to estimate the reaction of the ice sheet on sea level change, it is neccessary to understand the dynamical processes in the grounding zone. The vicinity of the grounding line is called the transition or grounding zone between the grounded ice sheet and the ice shelf. The continent Antarctica and its surrounding oceans represent a sub-system in the system earth. It plays an important role in the discussion about greenhouse warming and related sea level rise. The system or subsystem Antarctica consists of the inland ice sheet, the surrounding ice shelves, the atmosphere and the polar oceans. Ice shelves play an important role for the dynamics and possibly also for the stability of the Antarctic ice sheet. Therefore it is necessary to define care- Vaughan (1994) characterized the grounding line by 1 -7 5° -6 -60 ° 8° 20 0° 8° 30 derived by terrestrial geodetical measurements (Karsten and Ritter 1990). In 1993-94 seismic shootings allowed a far more accurate determination of the grounding zone (Mayer 1996). The tidal investigations in the grounding zone were inspired by Holdsworth’s studies on Erebus glacier tongue and his elastic beam approach (Holdsworth 1969, 1974). In this approach a simple elastic beam model is used, to get an approximation of the tidal deflection in dependency on the Young modulus. In order to obtain input data for a two-dimensional finite element model, field data have been collected at the south-western grounding line of the Ekstroem Ice Shelf (Riedel 2002). The main emphasis of the field campaign was placed on collecting continuous observations of the horizontal as well as the vertical component of the ice displacement and their lateral variations across the grounding zone. In this study the question will be addressed of how the ice shelf interacts geometrically with the ocean tides. Therefore we analyse the observations on the cross-section of the grounding zone. This will examplarily be done by using the observations that have been obtained on the Ekstroemisen using GPS receivers, gravimeters and tiltmeters. Due to fact that on average the time series cover only an observation interval of eight days we can state that the standard techniques of the time-series analysis are not sufficient. For our purposes the only helpful standard algorithm of the time series analysis was the fast Fourier transform. The time series were even too short to determine the most important tides (O 1 , K1 , M2 , S2 ) qualitative. Any reliable quantification of the parameters amplitude, frequency and phase lag was impossible. All the different spectra solutions like complex fast Fourier transform and zero padded complex fast Fourier transform of the data or Fourier cosine transform yield results with similar short comings (fig. 2). Only three of the four main tides could be determined significantly. The GPS data seem to have one diurnal and two semidiurnals tidal waves and the gravimetric data showed two diurnals and one semi-diurnal tidal signal. These time-series are extremely short to derive a model of the tidal response. 0° ° -30 8° 40 A0 BC ° 60 -90° -90° 90° 12 0° 180° D200 A003 A3 D100 A002 A2 A004 A4 GL 0 km 05 km 1 A001 A1 100 0 8° 40 8° 30 1 2 3 4 5 km Figure 1: Map of Ekstroemisen grounding zone with the positions of continuous working GPS receivers, gravimeters and tiltmeters. The black square in the inlay map shows the position of Ekstroemisen in Antarctica. the change of surface slope from a steep, undulating surface of grounded ice to the gently sloping surface of a floating ice shelf. It represents the limit of tidal flexure of the ice surface and the position of the bedrock under the ice body, where ice starts to float on the ocean. This feature is the onset of ablation processes at the ice-ocean interface right at the grounding line. Another characterization of the grounding zones is the transition processes of the ice from shear stress dominated dynamics to a longitudinal stress regime. But looking closer, the definition of a grounding line becomes comparable to that of a shore line. Its position varies and depends on the shore structure, the ocean tides and possible sea level changes. The Ekstroemisen (Ekstroem Ice Shelf) is one of the smaller ice shelves in Queen Maud Land belonging to East Antarctica. The only German overwintering station Neumayer (70 ◦ 39’S, 08◦ 15’W) has been established up on the northern part of the Ekstroemisen (fig. 1). The part of the Ekstroemisen grounding zone that has been investigated in this study lies 140 km south of the Neumayer station on the south-western rim of the ice shelf. A first rough impression of this area has been obtained from the topograpical cross-sections which have been 2 Data sources The continuous geodetic monitoring in the vicinity of the grounding zone using GPS, gravimeters and tiltmeters started on February 10 th and had to be finished 2 0.3 O1 M2 K1 (a) S2 Figure 3: Observation periods of the GPS (black) and gravimetric (grey) stations. 0.1 only 16 days later due to bad weather conditions (Riedel et al. 1999). To obtain the pure geometrical response of the ice body in the grounding zone caused by the ocean tides, six GPS receivers were set up each with a sampling rate of 15 seconds. One receiver acted as the permanent base station at the site KOTA, which is situated on a bedrock near the temporal airfield Windy Corner in the Kottas Mountains at the eastern margin of the Heimefrontfjella (Heinert et al. 1998). A second receiver was set up as the local reference station at site A001 during the whole campaign (Riedel and Heinert 1998). The daily position of the northward drifting site A001 was given by the baseline solution of KOTA-A001. An additional kinematic processing of the 300km long baseline yields no signifcant tidal signals at A001. The network of the remaining GPS receivers was recording simultaneously on three respectively four additional sites. Their tidal signal is a result of the kinematic baselines to station A001. The map in figure 1 shows the distribution of the GPS sites in the grounding zone. The sites A001 and A004 were placed on grounded ice while the sites A003, D100 and D200 were set up on the ice shelf. The site A002 marks the grounding line position, where the ice body is assumed to start floating on the ocean. At the sites BC, GL0 (close to A002), KM05, KM1 (close to A004) and KM2 each one tiltmeter and one gravimeter were buried in a snow pit. The gravimeter and tiltmeter raw data were recorded in intervalls from five to 300 seconds depending on the data logger storage. The gravimeter output shows a combined signal of solid earth tides and the response of the ice on the ocean tides. The decrease of the local acceleration can be interpreted as a Bouguer plate of water (Torge 1991) with an unknown thickness that increases under the ice body during the high tide. With a combined local free-air and amplitude [m] 0.2 0.0 0.00 0.01 0.02 0.03 0.04 0.05 frequency [mHz] 0.06 0.07 0.08 0.3 O1 M2 K1 (b) S2 amplitude [m] 0.2 0.1 0.0 0.00 0.01 0.02 0.03 0.04 0.05 frequency [mHz] 0.06 0.07 0.08 Figure 2: The periodicities in the spectra of the GPS observations at the nearly undisturbed station A003 (a) indicate an ocean tide signal, while the gravimetrical observations at station KM2 yield a distribution of periodicities (b), which are typical for the gravimeter registrations of the tides of the solid earth. The fast Fourier transform has been done on the original data with (line) and without (broken line) zero padding. It can be compared with the Fourier cosine transform on the autocovariance function (dotted line). 3 Bouguer gradient of 0.04308 mGal · m −1 it is possible to get geometrical height variations based on the approaches of Thiel (1960) and Doake (1992). The pure geometrical information of the tiltmeters give us the possibility to separate sites with pure earth tides from those which have got mixed tidal signals in the gravimetrical data. As a result only the site KM2 showed unbiased earth tides, as no tilt signal exists there. Furthermore, the tilt information is an indicator for the deformation intensity as we assume that a tilt change only can be found in a region where the tidal energy is dissipated. Accordingly, we found no tilt at the site BC which has a minimum distance of five kilometres from any grounded ice (figure 1). An overview of the periods of observation at the different sites is given in figure 3. than the quantile of the Student distribution α P t̂ ≤ tf ;1− α2 = 1 − 2 with a high-significance threshold α = 0.01. The quantile tf ;1−α of this moving average can be computed using the degree of freedom f f= Outliers, noise, data gaps as well as linear and nonlinear trends distort our data more or less seriously. One has to face the problem that these biasing effects cannot be treated independently of each other: the outliers and the noise falsify the trend estimation, a linear filter algorithm requires data without gaps. Also, outliers and noise are not easily to reduce, if a signal cannot be filtered. Consequently, we screened, analysed and modelled our data in a recursive way and developed our own adapted algorithms. At first, we eliminated the extreme outliers in every data segment. Therefore we compared a single value x t of the time series with the result of a moving average x̄ t with half-sided cosine weight function b τ 1 π xt−τ 1 + cos b − 1 τ =1 b b−1 (b − 1)2 · sx t = . b 2·b A detected single outlier can be substituted by the value of the moving average. It is useful to add a random value derived from a stationary Gaussian process with the local standard deviation s xt . However, this algorithm has to be stopped if more than five outliers in sequence have been detected. Otherwise this algorithm can create a random walk process (Schlittgen and Streitberg 1997). If there are more than five outliers then this sequence should be treated as a data gap. The treatment of data gaps is a serious problem with respect to analyses, which require equidistant data. A quite easy and sufficient way is given by Melchior’s method (Kobarg 1988) on the base of Labrouste’s combination of ordinates (Lecolazet 1956). For time series of tides this interpolation combines highly positively correlated values of the access intervals to fill the gaps. Typically, the highly correlated intervals of tide observations are shifted by 24, 48 and 72 hours. 3 Data screening x̄t = (3) (1) x̃t = − with the width b = 10, which is equivalent with two and half minutes given by our sampling rate. Accordingly, we can test whether x t and x̄t are statistically equal (null hypothesis) or x t differs significantly (alternative hypothesis). The estimation of the Student ratio t̂ can be written as b−1 |xt − x̄t | = |xt − x̄t | (2) t̂ = b sx t (xt−τ − x̄t )2 + 1 (xt−72h + xt+72h ) 20 3 (xt−48h + xt+48h ) 10 3 (xt−24h + xt+24h ) 4 (4) In distorted time series it can happen that such an invariable interpolation tries to use values of the access intervals, in which data are missing as well. Consequently, we tried to change the source intervals. One possible solution is the use of access intervals within time intervals of high negative correlations with respect to the gap. In those cases we used a modified Melchior τ =1 with the empirical local standard deviation s xt . The null hypothesis can be accepted if the estimated t̂ is smaller 4 algorithm with heuristically determined weights. x̃t = + access intervals + (a) − 45 46 47 48 filling interval 49 50 51 52 45 46 47 filling interval 48 49 53 (b) 50 51 52 x̃t = 53 45 46 47 t 50 51 52 uτ · xt±(I+τ ) with I ∈ N (6) The question is, how to determine the unknown weight vector u. In an undistorted interval of the time series it is possible to build differences between the known values xt and modelled values x̃ t , whereby one starts with a random set of weights. To get an optimal set of weights the mean squares 2 (x̃t (u, I, b) − xt ) = vt2 (7) (c) weight function filling interval 48 49 b τ =1 days of the year access intervals (5) To be as flexible as possible we developed a correlative Melchior algorithm (fig. 4). By using the YuleWalker equation (Schlittgen and Streitberg 1997) it is possible to determine the weights of an auto-regressive process AR[p] of the order p from well-known autocorrelations. Unfortunately, this combination uses values that are directly neighboured to those we are looking for. That means for data gap, which should be filled, that it can only consist of one single value. Let a data gap have the size of n values. Then we need each the number of b values of x t before and behind a data gap to interpolate one value x̃ t of the gap. So, the first element u1 · xt±(I+1) of the combination has to be I ≥ n values away from the gap at time t. days of the year access intervals 1 (xt−30h + xt+30h ) 10 1 (xt−24h + xt+24h ) 2 1 (xt−18h + xt+18h ) 10 1 (xt−6h + xt+6h ) 5 t have to be minimized. The most comfortable way to solve this minimization problem is to use one of the various non-linear optimization algorithms (see section 5 and appx.). We recommend that the interval of the time series, which is used for the weight determination, should have the number of 3·(I+2b) more or less undistorted observations. If one starts to fill the smaller gaps first, it should be possible to fill all the gaps in a time series by using these three methods. To sum up one may say that Melchior’s method and its first adaptation is quite useful for tidal signals, but only the second adaptation can be used for other signals without the typical tidal character as well. 53 days of the year Figure 4: Data filling: (a) Melchior’s method, (b) an adapted Melchior method and (c) an autocorrelative Melchior method with the symmetrical weight function. 5 4 Data analysis For various questions we need only special frequency ranges. Therefore, we filtered the time series by using a linear high- or low pass filter. As weight function we used the so-called Gaussian core g (τ ) = τ2 1 √ · e− Θ2 Θ π (8) with the form parameter √ ∆t 2 and τ = , Θ= e b Figure 5: Example of the convergence of the minimization procedure using the steepest descent (left) or the quasi-Newton method (right). whereby b determines the width of the filter. The related filter gain function is given by H (ν) = e−π 2 2 ν Θ2 . The phase lag is given by (9) ϕi = arctan The separation between high and low frequencies was defined by the filter width of b = ˆ 15 min. A statistical test yields the result whether the high frequent noise follows the normal distribution. Accordingly, the use of all statistical standard methods, which depend on normal distribution, gives no cause for concern. For further investigations it was, of cause, necessary to determine the trend of station motion from the time series. On one hand this result represents a station velocity and on the other hand the search for periodicities becomes possible after the linear trend reduction. The minimization of the simple linear regression (xt − (β0 + β1 t))2 (10) bi ai . (12) The periodical answer of an ice body on the periodicities to the ocean tides can be different from the theoretical ocean tides. Thus, this regression concept is not sufficient. Consequently, for a motion model, that should be free of hypotheses, the frequencies have to be treated as unknown parameters as well. Therefore, we created a model in which all the free parameters u i are estimated in the same recursion. The model refers to both the linear trend given by its zero value x 0 and the related gradient m and the periodicities which can be described by their amplitude A, the frequency ν and the phase lag ϕ. In case that the model has to fit a gravimetrical time series the parameter e determines the effect of the tides of the solid earth: τ was sufficient for these purposes. Φt (u) = x0 + m · t + e · E(t) n + Ai · sin (2πνi · t + ϕi ) 5 Parametric modelling of iceocean interaction (13) i=1 with For the modelling of ocean tides it is quite common to use a regression of the parameters amplitudes and linearized phase lags ai · cos (2πνi t) + bi · sin (2πνi t) , (11) Φt (νν ) = uT = [x0 m e A1 ν1 ϕ1 . . . An νn ϕn ] (14) and with n = 4 representing the four main tides O1 , K1 , M2 and S2 . At first, the geometrical variation has to be deduced from the variation of the local gravimetrical signal. This signal still contains the tides of the solid earth, which had to be estimated together with the ocean tides. Therefore, we used the global earth tide model i whereby the frequencies ν i of the tides are assumed to be known: νi = νO1 , νK1 , νM2 , νS2 , .... 6 7 5 1 3 0 1 amplitude [m] distance to the grounding line [km] 9 -1 -3 36 38 40 42 44 46 48 50 52 time [day of the year] 54 56 58 60 Figure 6: The quite short ocean tide registration (left) along the profile crossing the grounding line yield highly distorted time series, which hardly can be interpreted. After a thorough data screening and modelling (right) the time series show typical ocean tide oscillations. 0,03 (b) (a) 0,3 S2 0,2 K1 O1 0,1 0,0 0,02 S2 0,0 2,0 4,0 6,0 8,0 10,0 -2,0 distance to assumed grounding line [km] O1 tilt phase lag [rad] phase lag [rad] 6,0 (c) 5,0 4,0 S2 3,0 K1 2,0 M2 1,0 -2,0 (d) 0,5 O1 5,0 4,0 S2 3,0 K1 2,0 M2 1,0 0,0 2,0 4,0 6,0 8,0 -2,0 10,0 gravimetrical pre-factor [-] distance to assumed grounding line [km] local tilt [mrad] -1,5 -1,0 -0,5 0,0 distance to assumed grounding line [km] 0,0 0,0 0,5 O1 0,01 0,00 -2,0 6,0 K1 M2 M2 amplitude [m] amplitude [m] 0,4 (e) 0,4 0,3 M2 0,2 S2 K1 O1 0,1 0,0 -1,1 0,0 2,0 4,0 6,0 8,0 distance to assumed grounding line [km] 10,0 (f) -1,2 -1,3 -1,4 -2,0 0,0 2,0 4,0 6,0 8,0 10,0 -2 distance to assumed grounding line [km] 0 2 4 6 8 10 distance to assumed grounding line [km] Figure 7: In subfigure a) the amplitudes of the shelf ice oscillation due to ocean tides modelled from combined GPS and gravimeter observations are shown and these amplitudes are zoomed around the grounding line’s vicinity in (b). The phase lags of identical stations have got small differences dependent on the sensor type: GPS and gravimeters (c) or tiltmeters (d). The measured (black line and dots) and modelled (grey line, no dots) local tilt due to the ocean tides is an indicator of the regions of ice body deformation (e). The gravimetrical pre-factors (f) are necessary to fit the tides of the rigid earth derived from the global model ETGTAB to the real gravimeter observations (13). 7 7.5 7.5 (a) 2.5 amplitude [cm] amplitude [cm] 5.0 (b) 2.0 0 -2.5 0.1 0.0 -0.1 -5.0 -2.0 -7.5 42 43 44 45 46 47 48 49 50 time [day of the year] 51 52 53 43 54 46 47 3.0 O1 M2 K1 O1 (c) S2 2.0 1.0 0.01 0.02 0.03 0.04 0.05 frequency [mHz] 0.06 M2 K1 amplitude [cm] amplitude [cm] 45 time [day of the year] 3.0 0.0 0.00 44 2.0 1.0 0.0 0.00 0.07 (d) S2 0.01 0.02 0.03 0.04 0.05 frequency [mHz] 0.06 0.07 Figure 8: Vertical station motions and their spectra due to the tides: measured (black) and modelled (grey) tidal motion at (a) station A002 (assumed grounding line) indicates a grounding of the ice shelf during the low tide. The related spectra (c) proof the non-harmonic tides by showing side peaks. The tidal motion of the station A004 (b) can only be described by an upward folded tide model. The related spectra (d) show a frequency doubling that indicates an elastic feedback motion at this station situated one kilometre behind the assumed grounding line. ETGTAB (Timmen and Wenzel 1995). The function E(t) represents this earth tide model in our equation (eq. 13). To fit this model to the gravimetrical data, we defined the pre-factor e. This factor changes locally, what may be caused by ocean loading effects (fig. 7). To get the parameter vector u we had to minimize the residuals vt between the model Φ t and real data l(t) by using the least mean squares. 2 ft (u) = (Φt (u) − lt )) = vt2 . (15) case of systematic errors. Due to these restrictions of the Gauss-Newton methods, we decided to use the methods of non-linear programming. The simplest recursion that is used for non-linear programming is given by the gradient method which is also known as method of steepest descent or as NewtonRaphson method (see appx.). Starting with random elements of the parameter vector u0 , the minimization follows the steepest descent of the solution function ∇f (u 0 ) with step length α and the parameter vector is updated by Most of the Gauss-Newton adjustment methods including the regression require good parameter approximations and huge matrixes. Furthermore, these methods are based on the estimation function of the least mean squares. Accordingly, it is impossible to change the estimation function to, e.g., the least median of squares making it quite difficult to get robust solutions in the uk+1 = uk − αk · ∇f (uk ) . t t (16) The determination of the step length is a particular problem. Most of the algorithms estimate the step length quite conservatively, which slows down the convergence (fig. 5 left). In addition the Newton method uses a local Hessian matrix H. This matrix contains the 8 derivatives of the second order. The inversion of this matrix determines an optimal step size (see appx.) of the iteration (fig. 5 right). uk+1 amplitude and phase lag stability. This turned out as to be quite difficult for the data around the grounding zone, where the magnitudes of the different effects change rather rapidly in space and time. Although the tiltmeter signals cannot be used directly, they were quite important for interpretation purposes. For example at the station KM2 there are no typical ocean tide signals. Consequently, we know from this tiltmeter time series that we have to expect a nearly undistorted solid earth tide signal on the neighbouring gravimeter. The amplitude and tilt information of all stations clearly show the ice body deformation in the observed area between the assumed grounding line and the station Base camp (BC). The station BC situated about eight kilometres north of the grounding line shows the highest ocean tide impact with a maximum amplitude of about 60 centimetres. This is 80% of the prediction from the regional Weddell Sea Model (Robertson et al. 1998). The amplitudes of the main tides M2 , S2 , K1 and O1 obviously decrease towards the assumed grounding line (fig. 7). The periodicities in the time series of the stations above and behind the assumed grounding line do not disappear. Consequently, the spectrum of the data at the station A002-GL0 still shows the typical ocean tide peaks. Though, the side peaks indicate that the motion is not harmonical any more (fig. 8c). The model of vertical motion of station A002-GL0 (fig. 8a) does not fit during the low tide. This suggests that the ice body touches the rocks of the sea floor. On the one hand the existence of tide signals at station A002-GL0 implies that the grounding line as it was determined from seismic shootings is placed more south and on the other hand the nonharmonic motions support once more Vaughan’s theory that we have to assume a wider grounding zone. The amplitudes do not reach zero even a kilometre behind the assumed grounding line (fig. 7). Rather, there exists a frequency doubling in the spectra of the station A004-KM1 (fig. 8d). The model of the vertical motion of station A004-KM1 (fig. 8b) fits only under the condition that during the low tide the convex parts of the wave is folded upwards. That means that the ice shelf lifts up as well during the high tide as during the low tide and touches down in between. This is a significant evidence for an elastic feedback at this station (fig. 9a-c). This elastic feedback is obvious in the phase plot (fig. 7 d) as well. The phase lag of every periodicity changes significantly at the stations above and behind the formerly assumed grounding line, whereas this change is dependent on the tide’s frequency. The diur- −1 = uk − ∇2 f (uk ) · ∇f (uk ) = uk − H−1 k · ∇f (uk ) (17) The use of the frequently inverted Hessian matrix causes a lot of numerical problems, which can result in the termination of the recursion before convergence is reached. To avoid these numerous inversions, a group of so-called Quasi-Newton methods use approximations of the inverted Hessian matrix H̃−1 k (see appx.). uk+1 = uk − α · H̃−1 k · ∇f (uk ) (18) Because of the approximation of the Hessian matrix the update of the parameter vector requests an optimized step length α. This 1-dimensional line search can be solved by a separate optimization with e.g. an onedimensional steepest gradient recursion. 6 Results It has once more to be emphasized that all the modelling efforts that have been done in our study, were necessary to combine the data of different sensors installed at different places during different observation intervals (fig. 6). This incoherence of the sensor field is caused by the logistical and environmental situation of the investigated area. Nevertheless, we need the information of how this ice body interacts with the ocean tides at all places at one time. It is straight forward to model the GPS data first. They represent directly the geometrical height variations due to the ocean tides. On the other hand we have to be careful with the gravimetrical data. The solid earth tides reach maximum amplitudes of about 15 centimetres around the Ekstroemisen grounding zone. At the stations KM1-A004 and GL0-A002 where both GPS and gravimeter data were available the comparison between a GPS signal and the related gravimetrical signal showed that the GPS signal is much more reliable, even if the gravimetric signal had been corrected. Accordingly, we modelled the ocean tides using the GPS time series first. In the second step, we tried to explain the gravimetrical signals by fitting all known effects to the model.The other gravimetrical time series at KM2, KM05 and BC were modelled with respect to regional 9 (a) inland ice ice shelf water KM1-A004 bedrock GL0-A002 (b) ice shelf inland ice water bedrock (c) inland ice water ice shelf bedrock ary moves during spring tides more than one kilometre landwards and back twice a day. The ice body at the formerly assumed grounding line – represented by the data at the site A002-GL0 – rests several hours on the bedrock instead of reacting unbiased on the low ocean tides. Much more surprising seems to be the uplift of the ice body during the low tides at site A004-KM1. This site one kilometre behind the grounding line was assumed to be situated on grounded ice. Both the low and the high tides induce a maximum uplift of one centimetre here. We interpret the uplift during a low tide as an elastic feedback of the ice body. Two assumptions of Holdsworth’s models cannot be verified for the Ekstroemisen: the ice body is not vertically fixed at the grounding line and the grounding line is not horizontal invariable with respect to the bedrock either. Vaughan’s grounding line definition using a stationary bedrock-water boundary at the ice shelf bottom as well has to be modified at first in the very case of the situation at Ekstroemisen. We assume outgoing from this case that comparable results can be found for other regions with a shallow bedrock topography as well. Consequently, this example shows that the system boundary between the inland ice and the ice shelf can often be instationary in space and time. The impact of this instationarity is significant and systematic. Accordingly, the variability of the system boundary has to be taken into account for the determination of the mass balance of an ice shelf. Acknowledgments Figure 9: Schematic cross-sections through the ice shelf at the grounding line during (a) the mean tidal level, (b) the high tide and (c) the low tide as suggested by our results. Our reviewers have greatly contributed to the quality of the manuscript. We are most grateful to our reviewer D. Vaughan and the editor H. Schmeling who have given us encouraging support. nal waves cross over between station GL0-A002 and KM05, while the semi-diurnals change over a longer distance. 7 Conclusions The Ekstroemisen grounding line is not a clear line that strictly separates a grounded from a floating ice body. Furthermore the presented results show that this bound10 References Bartsch, H.-J. (1999): Taschenbuch Mathematischer Formeln. 18 th ed. Fachbuchverlag Leipzig im Carl-Hanser-Verlag, München-Wien. Bazaraa, M. S. and Shetty, C. M. (1979): Nonlinear Programming Theory and Algorithms. John Wiley & Sons, New York-Chichester-BrisbaneToronto-Singapore. Doake, C. S. M. (1992): Gravity tidal measurements on Filchner Ronne Ice Shelf. In Oerter, H. (ed.): Filchner-Ronne Ice Shelf Programme (FRISP), Report, Alfred-Wegener-Institut für Polar- und Meeresforschung, Bremerhaven, 6, 34–39. Grundmann, W. (2002): Operations Research Formeln und Methoden. Teubner, StuttgartLeipzig-Wiesbaden. Heinert, M., Oerter, H. and Riedel, B. (1998): Geodäsie im Bereich der Kottasberge, Heimefrontfjella. In Jokat, W. and Oerter, H. (eds.): Die Expedition ANTARKTIS-XIV mit FS Polarstern 1997 – Bericht vom Fahrtabschnitt ANT-XIV/3. Berichte zur Polarforschung, Bremerhaven, 267, 132–133. Heinert, M. and Riedel, B. (2003): A parametric model of ice-ocean interaction in the grounding zone derived from extremely short time series. Abstract. 7th International Symposium on Antarctic Glaciology, University of MilanoBicocca, Italy. Holdsworth, G. (1969): Flexure of a floating ice tongue. J. Glaciol., 8 (54), 385–397. Holdsworth, G. (1974): Erebus glacier tongue, Mc Murdo Sound, Antarctica. J. Glaciol., 13 (67), 27–35. Karsten, A. and B. Ritter (1990): Trigonometrisches Nivellement 1987 auf dem Ekstroem-Schelfeis. In Miller und Oerter (ed.): Die Expedition ANTARKTIS-V mit FS Polarstern 1986/87 – Bericht von den Fahrtabschnitten ANT-V/45. Berichte zur Polarforschung, Bremerhaven. No. 57. Kobarg, W. (1988): Die gezeitenbedingte Dynamik des Ekstroem-Schelfeises, Antarktis. Berichte zur Polarforschung, Bremerhaven. No. 50. Lecolazet, R. (1956): Application a L’analyse des Observations de la Maree Gravimetrique, de la Methode de H. & Y. Labrouste dite par Combinaisons Lineaires D’ordonnees. Ann. de Geo11 phys. 12, Fasc. 1, 59–71. Mautz, R. (2001): Zur Lösung nichtlinearer Ausgleichungsprobleme bei der Bestimmung von Frequenzen in Zeitreihen. Deutsche Geodätische Kommission, Serie C , No. 532, München. Mayer, C. (1996): Numerische Modellierung der Übergangszone zwischen Eisschild und Schelfeis. Berichte zur Polarforschung, Bremerhaven, No. 214. Rardin, R. L. (1998): Optimization in Operations Research. Prentice Hall, Upper Saddle River, USA. Riedel, B. and Heinert, M. (1998): First results of GPS array observations in the grounding zone of Ekstroem Ice Shelf. In Oerter, H. (ed.): FilchnerRonne Ice Shelf Programme (FRISP), Report, Alfred-Wegener-Institut für Polar- und Meeresforschung, Bremerhaven, 12, 74–76. Riedel, B., Nixdorf, U., Heinert, M., Eckstaller, A. and Mayer, C. (1999): The response of the Ekströmisen (Antarctica) grounding zone to tidal forcing. Ann. Glaciol., 29, 239–242. Riedel, B. (2002): Modelle zur Beschreibung des gezeitenbedingten Bewegungsverhaltens von Schelfeisen in der Übergangszone. Ph.D. thesis. Technical University Braunschweig. Robertson R., L. Padman and G. D. Egbert (1998): Tides in the Weddell Sea. In: Ocean, Ice, and Atmosphere: Interactions at the Antarctic Continental Margin. Antarctic Research Series, 75, 341–369. Schlittgen, R. and Streitberg, B. H. J. (1997): Zeitreihenanalyse. R. Oldenburg Verlag, MünchenWien. Thiel, E., A.P. Crary, R.A. Haubrich and J.C. Behrendt (1960): Determination of Ocean Tide, Weddell and Ross Seas, Antarctica. J. Geophys. Res., 65(2), 629–636. Timmen, L. and Wenzel, H.-G. (1995): Worldwide synthetic gravity tide parameters. In: Sünkel, H., (ed.) Gravity and Geoid. Berlin, International Association of Geodesy, 92–101. Torge, W. (1991): Geodesy. 2 nd ed. deGruyter, Berlin-New York. Vaughan, D. G. (1994): Investigating tidal fexure on an ice shelf using GPS. Ann. Glaciol., 20, 372– 376. Appendix a Taylor-polynomial of the second order (compare eq. 19). Derivation of the method of the steepest descent f (uk+1 ) = The method of the steepest descent can be deduced from the Taylor-polynomial (Bartsch 1999). + ∞ 1 ∂ i f (uk ) i f (uk+1 ) = (uk+1 − uk ) iu i! ∂ k i=0 To determine a steepest local descent, the first partial derivative as a gradient is sufficient. Accordingly, only the polynomial of the first order is necessary for the further analysis. grad(f (uk )) = ∇f (uk ) = ∂f (uk ) ∂uk (20) (21) The stationary vector u opt marks a local optimum of the solution function f (u opt ). Consequently, the polynomial has to be solved for u k+1 : uk+1 = uk + ∆f (xk ) · ∇f (uk ) (22) The difference of the values of the function ∆f (x k ) can be interpreted as the step length α. Correspondingly, the general recursion of the steepest descend method can be expressed as follows (Rardin 1998). uk+1 = uk ± αk ∇f (uk ) ∂ 2 f (uk ) ∆u2k+1 ∂ 2 uk (24) ∆uk+1 = uk+1 − uk (19) k = 1 . . . m. ∂f (uk ) (uk+1 − uk ) ∂uk ∂f (uk ) ∆uk+1 ∂uk with with f (uk+1 ) = f (uk ) + f (uk ) + (23) The search of an optimal step length α requires a separate algorithm. Mostly, the step length is estimated quite conservativly to avoid that too long steps miss the next local optimum. Because of this conservative step length estimation the convergence of this recursion needs a lot of steps. Derivation of the Newton method To force a faster convergence of the algorithm it is necessary to find an optimal step length instead of the small linear steps α that are used for the steepest descend method. Consequently, it is possible to start with At first the step length along the solution function has to be defined 1 . 1 ∆f uk = ∇f (uk ) ∆uk+1 + ∇2 f (uk ) ∆u2k+1 (25) 2 The derivation with respect to ∆u k allows determining the impact of the step length of the parameter vector u k on the solution function. ∂∆f (uk ) = ∇f (uk ) + ∇2 f (uk ) ∆uk+1 ∂∆uk (26) We are looking for the stationary vector. Accordingly, the derivative of the substitution function has to have the value zero (Rardin 1998). A further progress along the gradient would lead to an increasing distance to the next local extremum. ∂∆f (uk ) ! =0 ∂∆uk+1 (27) The substitution function in eq. (24) can be recomposed. Remember that ∆u k in eq. (7) was defined as the difference of the two places in the parameter space k + 1 and k. −∇f (uk ) = ∇2 f (uk ) (uk+1 − uk ) (28) To yield the recursion of the Newton method with its so-called Newton step the equation has to be solved for uk+1 . −1 uk+1 = uk ± ∇2 f (uk ) ∇f (uk ) (29) The comparison of this expression with the recursion of the steepest descend method makes clear that instead of an undefined step length α k (23) we can find the Newton step from the vector product of the gradient and the inverse Hessian matrix H −1 (u), whereby this matrix is defined as H(uk ) = ∇2 f (uk ) = ∂ 2 f (uk ) . ∂uk,i ∂uk,j (30) 1 The resulting substitution function is only an approximation with all its problems (Mautz 2001). 12 Pseudo-inverse Hessian matrix approaches The BFGS approach after Rardin (1998) has got a different appearance: for the Quasi-Newton method The steadily repeated inversion of the Hessian matrix forms a serious problem of singularity. The combination of numerical derivatives in an approximately linear surrounding of the solution function, which one find far away from local extrema, will cause matrix instabilities and singularity. The algorithm will stop before having converged. Therefore, this algorithm has to be modified. Typically, the recursion uses a pseudo-inverse approach of the Hessian matrix. The recursion starts because of missing information with an identity matrix as the pseudo inverse of the state k = 0 (Grundmann 2002). The DFP2 approach after Bazaraa and Shetty (1979) for the pseudo-inverse Hessian matrix H̃−1 k+1 can be expressed as −1 H̃−1 k+1 = H̃k − λk+1 ]T · H̃−1 [λ k · λ k+1 = H̃−1 k − + T −1 H̃−1 k λ k+1 H̃k λ k+1 λ k+1 ]T H̃−1 [λ k λ k+1 T [∆uk+1 ] λ k+1 T [∆uk+1 ] λ k+1 · h · hT h= T [∆uk+1 ] λ k+1 − H̃−1 k λ k+1 λk+1 ]T H̃−1 [λ k λ k+1 with 3 Broyden, Fletcher, Powell Fletcher, Goldfarb, Shanno ∆uk+1λ k+1 H̃−1 k . ∆uk+1λ k+1 ρk+1 = ∆uk+1 [∆uk+1 ]T ∆uk+1λ k+1 (33) (34) Recursion of the Quasi-Newton algorithm Φ0 ← f (u0 ) ∇f (u0 ) ← (32) ∂f (u0 ) ∂u0 H̃−1 0 ←I 2nd step: determination of the minimization direction vector. ∆uk+1 ← H̃−1 k ∇f (uk ) 3rd step: 1-dimensional minimization of the value of the solution function along the minimization direction vector. This step is only required if the pseudo-inverse Hessian matrix H̃−1 k is used and can be solved as an own steepest gradient minimization: λ k+1 = λ k+1 = ∇f (uk+1 ) − ∇f (uk ) 2 Davidson, + 1st step: the decision has to be done whether the recursion reached a stationary point or not. If the convergence process falls below the self-determined threshold , the recursion will stop. < (recursion stops) ∇f (u0 ) ≥ (recursion continues) ∆uk+1 [∆uk+1 ] ∆uk+1 H̃−1 k λ k+1 [∆uk+1 ] ∆uk+1λ k+1 with . (31) whereby − u0 ← rnd T + = T The BFGS3 approach after Grundmann (2002) is a polynomial extension of the DFP approach, H̃−1 k+1 λk+1 H̃−1 k λk+1 1+ · ρ k+1 ∆uk+1λ k+1 H̃−1 k Pre-step: before the start of the recursion, the parameter vector can be chosen by random, the related output of the solution function and its first derivatives can be computed and finally, the pseudo-inverse of the Hessian matrix can be defined as the positive identity matrix. −1 ˜ 2 f (uk+1 ) = ∇ T −1 H̃−1 k · λ k+1 · H̃k · λ k+1 H̃−1 k+1 f (uk+1 ) ← minα (f (uk + α · ∆uk+1 )) iff 13 −1 H̃−1 k = Hk . (35) 4th step: update of the parameter vector with and optimized step length α and computation of the local gradient. uk+1 ← uk + α · ∆uk+1 ∇f (uk+1 ) ← ∂f (uk+1 ) ∂uk+1 5th step: computation of the updated inverse Hessian matrix following eq. (32) or (33). −1 H̃ H̃−1 ← BFGS k+1 k 6th step: the recursion can be restarted at the first step after updating the epoch parameter. k ←k+1 14