an at89c51 microcontroller based control circuit for dual three phase
advertisement

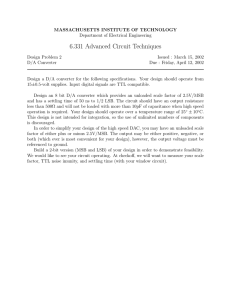
3rd International Conference on Electrical & Computer Engineering ICECE 2004, 28-30 December 2004, Dhaka, Bangladesh AN AT89C51 MICROCONTROLLER BASED CONTROL CIRCUIT FOR DUAL THREE PHASE CONTROLLED RECTIFIER K. M. Rahman1, M. A. Choudhury2 and Tofayel Ahmed Zulfikar3 1 Department of Mechatronics, International Islamic University Malaysia Jalan Gombak, 53100 Kuala Lumpur Malaysia, Email:kazi@iiu.edu.my 2 Department of Electrical and Electronic Engineering Bangladesh University of Engineering and Technology, Dhaka-1000, Bangladesh Email: mac@eee.buet.ac.bd 3 Subdivisional Engineer Ghorashal Power Plant BPDB, Ghorashal, Bangladesh ABSTRACT A new concept of building the controller of a thyristor based three-phase dual converter is presented in this paper. The controller is implemented using mixed mode digital-analog circuitry to achieve optimized performance. The realtime six state pulse patterns needed for the converter are generated by a specially designed ROM based circuit synchronized to the power frequency by a phase-locked-loop. The phase angle and other necessary commands for the converter are managed by an AT89C51 microcontroller. The proposed architecture offers 128-steps in the phase angle control, a resolution sufficient for most converter applications. Because of the hybrid nature of the implementation, the controller can change phase angles online smoothly. The computation burden on the microcontroller is nominal and hence it can easily undertake the tasks of monitoring diagnostic data like overload, loss of excitation and phase sequence. Thus a full fledged system is realizable with only one microcontroller chip, making the control system economic, reliable and efficient. 1. INTRODUCTION Thyristor based three-phase controlled rectifiers are widely used in the industry for controlling dc motor drives. Controlled rectifiers offering power conversion from ac to dc are reliable and have higher lifetime compared to other converters. DC motors have higher torque than ac motors and hence are suitable for variable speed and speed reversing applications requiring high torques [1]-[2]. Although the operation of controlled rectifiers is simple, the realization of the converter control circuit is complex in nature [3]-[5]. The control circuit needs the basic functionalities like (i) Six state pulse generation and gate drive isolation, (ii) Synchronization of the control pulses to the power frequency, (iii) Smooth ISBN 984-32-1804-4 transition in phase angle control, (iv) Startup control, (v) Phase sequence check, field excitation check and over-current protection. If the pulse pattern generation and other control tasks are to be undertaken by a single processor, an ultra high speed processor is needed because of the real-time nature of the system [6]. Moreover, special design interfaces are required for sensing excitation loss and phase sequence checks. This makes the system implementation costly. In this paper, a new approach is proposed where a hybrid type circuit generates the real time pulses for the converter and a processor supervises the controller functionality. The processor sets the phase angle, monitors the current, phase sequence, excitation condition and external control inputs for start, stop, speed change and speed reversal operations. For compact and cost effective design, instead of using a general purpose microprocessor along with peripheral interfaces, a single microcontroller chip may be used for the implementation. All the necessary controls of a vertical lathe machine driven from a 55kW dc shunt motor are incorporated in the proposed design using AT89C51 microcontroller. It is observed that the AT89C51 driven from a 20MHz clock along with the hybrid controller can efficiently accommodate all the control functions in the full operating range of the converter. 2. THE CONTROLLED RECTIFIER The dual-converter is designed with SKKT92 silicon-controlled-rectifier (SCR) modules. Because of application specific design, only one converter (either the forward converter, P or reverse converter, N) operate at a time. The P converter gives positive output voltage Vs, whereas, the N converter gives negative output voltage. The structure of the dual converter is shown in Fig. 1. 347 Reverse (N) converter Forward (P) converter va = Vm sin ωt + T3 T1 A ~ B T4 ~ C T6 T3* T1* T5 ~ Vs ~ A T4* T2 ~ T5* B T6* ~ C T2* - Fig. 1 Thyristor based dual converter structure. Three phase mains are connected to the ac inputs A, B and C for phase-A, phase-B and phase-C respectively. Considering a phase sequence of ABC, the phase angle control range is π/6 ≤ α ≤ 2π/3. Within the operating control range (π/6 ≤ α ≤ 2π/3), two thyristors (one from the top row and the other from the bottom row) of the converter conducts the dc output load current. The overlapping of conduction of two thyristors are π/6. For three phase ac input voltages given in (1), the firing angle α is calculated considering the positive zero crossing of phase A voltage va as the reference. v a = Vm sin(ωt ) vb = Vm sin(ωt − 2π / 3) vc = Vm sin(ωt − 4π / 3) (1) Considering inductive load, the output voltage is given by, 3 α+π / 3 Va = vab d (ωt ) π α 3 α+π / 3 = Vm sin(ωt − 5π / 6)d (ωt ) π α 0 π/6 2π/6 π/2 2π/3 5π/6 π 7π/6 8π/6 3π/2 5π/3 11π/6 2π g1 g2 g3 g4 g5 g6 Fig. 2 Six state pulses for the ac/dc converter. 3. PROPOSED CONTROLLER 3.1 Hybrid Circuit for Six-State Pulse Generation The proposed scheme is shown in Fig. 3. A total of 128 different shifted patterns are stored in EPROMs. To have exactly π/3 radians shifting in the six-state real time pulses, the stored pattern are chosen to be a multiple of 6. In the proposed design each pattern has 6x64=384 bits. ~ ∫ ∫ ZCD Phase Detector LPF Divide by 384 VCO 3 Phase Supply Vs ~ ~ ~ + - Vcc (2) Simplification of (2) yields, V 3 3 cos(α − π / 6) Va = m π ~ Phase A Increase Decrease Overload Excitation Phase A Phase B Direction Position Mode (CC/CS) P0.2 P0.3 P0.4 P0.5 P0.6 P0.7 P3.3 P3.4 P3.5 RUN P0.0 PSEQ P3.0 Fopen P3.1 O/L P3.2 P2.0-P2.6 P0.1 A9-A15 CE A0-A8 D0-D5 Stored PWM Pattern 6 Forward Amplifier Reverse Amplifier Isolation AT89C51 From (3), it is evident that the converter gives maximum dc output of Vm 3 3 / π at α = π / 6 and zero dc output at α = 2π / 3 , giving a control range of π/2 radians. Six state pulses, each spaced at π/3 radians are required for the converter. For the P converter, the pulse sequences are g1, g2, g3, g4, g5 and g6 for the thyristors T1,, T2, T3, T4, T5 and T6. For inductive load, each thyristor may conduct for π radians. Hence the gate pulse of a thyristor should be extended for duration of π radians once fired. Typical firing pulses for the converter are shown in Fig. 2. For the reverse converter, the pulse sequences are same as the forward converter, however, the gating signals g1, g2, g3, g4, g5 and g6 are applied to the thyristors T*1, T*2, T*3, T*4, T*5 and T*6. P1.0-P1.7 Reverse Converter 9 7 F/R P3.6 (3) Forward Converter 8 DB0-DB7 +Vcc ADC0804 Position Potentiometer Fig. 3 Proposed control scheme using hybrid circuit for generating synchronized six-state pulses for the ac/dc converter. The centre frequency of the PLL-VCO is set to 384*50=19.2 kHz considering the nominal supply frequency to be 50Hz. The PLL takes few cycles to synchronize with the supply frequency. Hence the converter should not be turned ON during the capture period; otherwise, there will be unwanted high voltage output from the converter. To ensure error free operation, the AT89C51 sends a disable signal at P0:1 line connected to the PWM EPROM and the associate firing circuitry during the first few cycles. The AT89C51 microcontroller supervises the operation of the controller and makes necessary 348 diagnostics. The AT89C51 is programmed according to the following algorithm: Controller Algorithm 1) Initialize the reference voltage output Vref. Set Vout = 0; Vδ = 0. Disable EPROM output. 2) Check the field circuit at P0.5. If field circuit is open goto step 17, else goto step 3. 3) Check the phase sequence from the signals at pins P0.6 and P0.7. If phase sequence is not correct, disable the EPROM then goto step 16. 4) Delay for some time so that the PLL can lock the input supply frequency. 5) Check the mode of operation at pin P3.5. If constant motor speed is needed (mode=0), then set Vchange = 0, otherwise read the ADC data connected at port P1 and set Vchange = ADC data. 6) Check the direction of rotation at pin P3.3. If direction changes while motor runs, reset speed to zero first and wait some time. Choose the appropriate converter (Forward or Reverse) at pin P3.6. 7) Check the field circuit. If field circuit is open, disable the EPROM and goto step 17, otherwise, goto step 8. 8) Check for inching motion request at P3.4. If inching motion is requested, disable the EPROM output and set Vout = 0, otherwise keep Vout as before. 9) Keep track of the number of cycles counter, K. If K = Kmax, goto step 10, otherwise, goto step 13. 10) Set K = 1. Check the speed requests at pins P0.2 (increase) and P0.3 (decrease). If speed increase is requested, increase Vref. If speed decrease is requested, decrease Vref. 11) If Vref > Vout, increase Vout. If Vref < Vout, decrease Vout. 12) If Vchange > Vδ, increase Vδ. If Vchange < Vδ, decrease Vδ. 13) Set the phase angle α corresponding to Vout + Vδ and send the phase angle data to the EPROM connected at port P2. Enable the EPROM. 14) Check the overload status pin P0.4. If overload detected, disable the EPROM and then goto step 18, otherwise, goto step 15. 15) Check for the start of a new cycle. If a new cycle is detected, increment K, otherwise, keep K as before. goto step 5. 16) Send blink signal at P3.0. Loop at this step. 17) Send blink signal at P3.1. Loop at this step. 18) Send blink signal at P3.2. Loop at this step. scan pulses in a fundamental period in synchronism with the phase-A voltage reference. The phase detector PD2 of CD4046 is used that produces inphase pulses at Cin with the reference at Sin when the PLL is in locked condition. The Q9 and Q10 lines of the 14-bit binary counter (CD4040) are connected to an AND gate. The output of the AND gate is connected to the asynchronous RESET input of CD4040. Thus the CD4040 is reset after a count value of 384. The inverted Q9 signal is connected to the phase detector input (Cin pin of CD4046). The waveform at Cin pin of CD4046 has a duty cycle of 66% in locked condition. 4049 Cin Phase A reference VCO OUT Clock Q9 Q10 Sin CD4046 CD4040 P2 Rx VCO IN Rz R1 Cx Reset Ry Q1-Q9 C2 Cx 9 A0-A8 C1 Fig. 4 Phase locked loop (PLL) circuit and the scan counter for the control circuitry. 3.3 Protection Circuits 3.3.1 Overload Protection To protect the converter thyristors and the dc load from over-current, two phase current from the ac side is monitored. Since the converter operate in fullbridge mode, during fault in any phase of the converter, the fault current returns through the other two phases. Hence, the current monitored on any two phases can sense the overload if any. In the proposed scheme, the overload protection circuit monitors the phase currents of A and B. Two current transformers isolate the live lines and the secondary sides are fed to a bridge rectifier. The output of the bridge rectifier is connected to a low resistance R1. A pulsating voltage is generated across R1 proportional to the maximum current of the A or B phases that is filtered with a large capacitor C. After filtering, the output becomes a dc voltage that is applied to an optoisolator (4N35) through a potentiometer. The potentiometer sets the overload limit. Vcc D1 D3 D5 A B R1 C D4 D6 R3 R2 P0.4 D2 74LS14 3.2 The Phase Locked Loop (PLL) Circuit 4N35 The PLL circuit is shown in Fig. 4 and is the crucial part of the controller. It is designed to generate 384 Fig. 5 Overload protection incorporated from two phases of the ac side. 349 Rectifier Output Voltage 600 Voltage (V) The output of 4N35 is buffered with inverters to generate TTL logic level voltage that feds the P0.4 pin of AT89C51. Figure 5 shows the over-current protection circuit used in the proposed scheme. 400 200 Phase A Phase B Phase C 0 Vcc D1 D3 D5 Phase C Neutral D4 R1 0 R2 D6 D2 P0.5 74LS14 4N35 Field (-) Field (+) 2 3 Angle (Rad) 4 5 6 Fig. 7 Three phase voltages and controlled rectifier output voltage for a phase angle of 600, the rms phase voltage is 240V. 5. CONCLUSION Fig. 6 Loss of excitation (field) protection taking feedback from the field circuit current. 3.3.2 1 Loss of Excitation Protection For shunt type dc motor drives, the field current is different from the armature current. The field circuit should be checked before supplying current to the armature; otherwise, short circuit current may flow damaging the armature commutators and the converter thyristors. The output of the field circuit bridge-rectifier (D1-D4) as shown in Fig. 6 is connected to two series diodes (D5-D6) before applying to the motor field. During steady state, dc current flows in the motor field if the field circuit is in good condition and its mains have proper supply voltage. The dc voltage across D5-D6 will be VE = 2Vth, where Vth is the threshold voltage of the series diodes D5 and D6. The diodes D5 and D6 are silicon power diodes, hence, during conduction VE will be about 1.4V. The output VE is connected to an optoisolator 4N35 and the isolated output of 4N35 is buffered and fed to pin P0.5 of AT89C51. Thus with presence of field excitation, the opto-isolator produces a logic 0 level voltage at P0.5 of AT89C51. 4. RESULTS The proposed converter and the controller are built and tested in the laboratory. The converter is also tested as part of the 55kW dc shunt motor drive of a vertical lathe machine of Ghorashal Power Plant Workshop. The controller functions properly as per theoretical expectations and offer smooth operation during steady state and dynamic conditions. The protection features are also tested during the running conditions and found to work well. Reversal of speed, increase or decrease of speed, constant cutting and constant motor speed operations are also tested and verified at both full load and no load conditions. Simulation output of a typical three phase ac input voltages and the rectifier output voltage are shown in Fig. 7 for a firing angle of 600. A new technique for designing the controller of a converter is reported in this paper. The controller is implemented using mixed analog digital and memory circuitry centered on a single chip microcontroller. Because of the hybrid type of implementation, the controller offers high performance at low cost, and hence is suitable for commercial and industrial applications. ACKNOWLEDGEMENT This work was supported by Bangladesh Power Development Board (BPDB). REFERENCES [1] J. Chaisson and M. Bodson, “Nonlinear control of a shunt DC motor,” IEEE Trans. Automatic Control, vol. 38, pp. 1662-1666, 1993. [2] Luo Fang Lin, Liu Zou Zong and D. Tien, “Nonlinear field weakening controller of a separately excited dc motor,” Proc. of the Int. Conf. on Energy Management and Power Delivery, EMPD’98 Singapore, pp. 552557, 3-5 March 1998. [3] H. M. El-Bolok, “A microprocessor-based novel scheme for constant angle triggering of thyristors under a variable frequency anode supply,” IEEE Tran. Ind. Electron., vol. IE-34, pp. 471-474, Nov. 1987. [4] Eui-Ho Song and Bong-Hwan Kwon, “A direct digital control for phase-controlled rectifier,” IEEE Tran. Ind. Electron., vol. 38, pp. 337-343, Oct. 1991. [5] Mirbod and A. El-Amawy, “A general purpose microprocessor based control circuit for a three phase controlled rectifier bridge,” IEEE Tran. Ind. Electron., vol. IE-33, pp. 310-317, Aug. 1986. [6] K. M. Rahman, “Analysis of microcomputer based three phase controlled rectifier for separately excited dc motor drive,” Proc. of Int. Conf. on Computer and Information Technology, ICCIT’99, pp. 75-79, 3-5 December, 1999. 350