Steady-state and dynamic load Performance of Six
advertisement

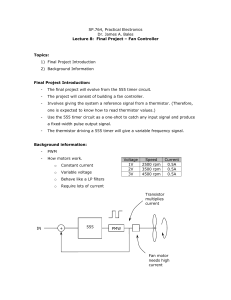
International Conference on Integrated Waste Management and Green Energy Engineering (ICIWMGEE'2013) April 15-16, 2013 Johannesburg (South Africa) Steady-state and dynamic load Performance of Six -Phase Self-Excited Induction Generator A. Senthil Kumar1, Josiah L Munda2, and G.K. Singh3 Using SPSEIG to divide the output power in two threephase groups allows for increased power in the drive system and improves the reliability. The main advantage of this configuration is that when failure happens in one of the threephase groups in the SPSEIG, the system can still operate at a lower power rating. Another advantage is that the generator supplies two separate three-phase loads, thereby improving the real power output. The first paper on the multi-phase induction generators appeared in 2005 [7], followed by some more works on sixphase self-excited induction generator (SPSEIG) [8-11]. Authors in [9-11] have presented the modelling and analysis of SPSEIG. In [9-11], performance evaluation of SPSEIG is discussed showing its practical feasibility, whereas [12] deals with the steady-state modelling and analysis of SPSEIG. The paper is organized as follows; Section 2 presents an explanation of the system under study; Section 3 is devoted to the effect of Self-Excitation, voltage buildup and collapse under no-load condition of SPSEIG; Section 4 deals with the effect of speed variation; while Section 5 presents a summary of the results. Abstract— this paper presents steady-state and dynamic load performance of a Six-Phase Self-Excited Induction Generator (SPSEIG) with capacitor excitation used in stand-alone micro hydro power generation. Detailed experimental investigations about the voltage build-up, collapse of voltage, self-excitation of SPSEIG, and operation with the capacitor connected in delta under no-load condition and connection of purely resistive load are elaborated. Keywords—self-excited induction generator, excitation, renewable-energy generation, speed control. capacitor I. INTRODUCTION E NVIRONMENTAL concerns and international policies are supporting new interest and development in smallscale power generation during the last few years [1]. Selfexcited induction generators have gained importance as they are particularly suitable for wind and small hydro power plants [2-3]. Interest in multi-phase drives has been steadily increasing over the past 30 years, mainly due to the advantages they possess over traditional three-phase drives. These include improved reliability, reduced torque ripple, increased torque density and reduction in inverter per-phase rating [4]. When high-power levels are required, the use of six-phase machines is one of the alternatives in industry. For variablespeed applications, power electronic converters are used to drive the machine, and the power level of the converter has to match the machine and the load. Limitations on the power level of semiconductor devices present a barrier on the increase in converter ratings [5]. In order to get rid of this limitation, multilevel converters have been developed where switches of reduced rating are used to construct high-power level converters. Instead of multilevel converters, multi-phase machines can be used. By dividing the handled power between multiple phases, generally more than three, highpower levels can be achieved even by using limited rated power electronic converters. Multi-phase systems expand the universe for drive and control purposes [6]. II. SYSTEM UNDER STUDY A simplified schematic diagram of the experimental setup is shown in Fig.1. SPSEIG is connected across a delta connected capacitor bank, single three-phase winding set abc and both winding sets abc and xyz through miniature circuit breaker(mcb) and subjected to separate three- phase star connected variable resistances through a contactor connected for both sets. The series capacitor as shown in Fig 1 is needed in order to improve the voltage regulation in SPSEIG. In the Fig.1 provision is made for alternative exploitation (in this experimental setup) of the machine as six phase output or three phase output. SPSEIG allows for the operation at adjustable speeds, which is sensed and display by a micron [mode: 2176] speed transducer and digital encoder range [609999] rpm unit. Fluke 43b is used to measure voltage, current, power and transient waveform. The induction machine used in this study is 50 Hz, 6 poles, 960 rpm, 1.1 kW, 2.9 A, 415 V, 36 slot squirrel case. All the 72 armature coil terminals were taken out A.Senthil Kumar1, Department of Electrical Engineering, Tshwane University of Technology, Pretoria-0001, South Africa. (corresponding author to provide phone: +27743559011; e-mail: vastham@gmail.com, Senthilkumara@tut.ac.za ). Josiah L Munda2, Department of Electrical Engineering, Tshwane University of Technology, Pretoria-0001, South Africa.. G.K. Singh3, Department of Electrical Engineering, Indian Institute of Technology, Roorkee-247 667, India. 292 International Conference on Integrated Waste Management and Green Energy Engineering (ICIWMGEE'2013) April 15-16, 2013 Johannesburg (South Africa) Cseries a MCB b Six phase SEIG V b Contactor Va Vc x 30° 1:1:1 T/F a Excitation capacitor Cshunt z b IL L O A D c x c y Vy y Vx Vz Contactor MCB Cseries Prime Mover z Fig. 1 Schematic diagram of the induction generator system employing a six-phase self-excited induction generator on a connection table mounted on the top of the machine body to give way for different winding schemes for the different number of poles and phases. The layout of the stator winding of the SPSEIG can be made as split phase winding configuration. In this configuration six phase stator winding can be made by two equal parts of star connected three phases winding sets (namely xyz and abc respectively) with spatial phase separation of 30 electrical degrees. In this configuration of stator winding design, there is a strong magnetic coupling between the stator phases. Here, neutral points of two threephase sets of stator windings have been isolated, in an attempt to prevent physical fault propagation from one three phase set to the other one, and to avoid the flow of triplen harmonics. The test machine was coupled to a semi closed-loop small hydro power (SHP) plant. The SHP test rig [8,9], consists of two identical service pumps, each having 150 litres per second discharge capacity at the head of 10 meters, connected to a 5kW cross-flow turbine of efficiency 56% through pipeline networks. The measured parameters of the test machine in p.u. are: R s1 =R s2 = 0.1198, R rr =0.2576, X s1 =X s2 = 0.1987,X r = 0.3985 From the magnetization curve as described in [8], the following approximation by the polynomial of degree 3 can be made: E g /F =- K 1 X m 3 + K2Xm2 – K3Xm + K4 Where, K 1 = 0.0002, K 2 = 0.0657, K 3 = 8.0427, K 4 = 550 TABLE I. INDUCTION MACHINE DATA FROM THE TESTS Six-phase induction machine data Resistances inductance at 50 Hz R s =4.095Ω Stator leakage inductance L ls= 25mH R r =7.79 Ω Rotor leakage inductance L lr =25mH 6 pole Mutual inductance L m =241 mH Frequency=50 Hz Rated power=1.1kW Further synchronous speed test has been carried out by means of a dc drive coupled to the induction machine. This test adds to the accuracy as it ensures zero slip. III. SELF-EXCITATION, VOLTAGE BUILDUP AND COLLAPSE UNDER NO-LOAD CONDITION OF SPSEIG A. Effect of voltage buildup and voltage collapse of SPSEIG at no load Table II and Table III show the analytical results for voltage build up and collapse for three values of excitation capacitance, when the capacitor bank is connected to one of its three-phase winding sets, and when the capacitor bank is connected to both winding sets. TABLE II VOLTAGE BUILD-UP AND COLLAPSE WHEN DELTA C-BANK IS CONNECTED ACROSS WINDING SET ABC AT NO LOAD. One of its three phase winding set is connected Excitation across C-bank C-bank Experimental results Analytical results Voltage Voltage Voltage Voltage buildup collapse buildup collapse 50µF 780 rpm 650 rpm 750 rpm 650 rpm 41µF 850 rpm 750 rpm 830 rpm 750 rpm 32µF 925 rpm 800 rpm 900 rpm 800 rpm A. Parameter Determination Test A no-load circuit test and blocked rotor tests are performed. The parameters of the induction generator are computed from the test data, and the results are listed in Table I. 293 International Conference on Integrated Waste Management and Green Energy Engineering (ICIWMGEE'2013) April 15-16, 2013 Johannesburg (South Africa) TABLE III VOLTAGE BUILD-UP AND COLLAPSE WHEN DELTA C-BANK CONNECTED ACROSS BOTH WINDING SET ABC AND XYZ AT NO LOAD Excitation Cbank 30µF 25µF 20µF Both winding set is connected across C-Bank Experimental results Analytical results Voltage Voltage Voltage Voltage buildup collapse buildup collapse 650 rpm 475 rpm 650 rpm 600 rpm 700 rpm 550 rpm 730 rpm 650 rpm 800 rpm 650 rpm 800 rpm 700 rpm B. Establishment of self- excitation Fig.2 illustrates the voltage and current transients across the three-phase winding set abc with the other three phase winding set xyz kept open. The SPSEIG is operating at 1000 rpm with the delta connected capacitor bank switched on across the winding set abc. SPSEIG was found to be selfexcited smoothly even with the excitation at the one three phase winding set. This is of course a consequence of the strong magnetic coupling between the two three phase windings. b. Fig.3.Self-excitation transients ;(a) voltage and current build-up across winding set abc of SPSEIG after switching on the delta connected bank of C sh = 25 µF at both winding sets abc and xyz, (b) voltage and current build-up across winding set xyz of SPSEIG after switching on the delta connected bank of C sh = 25 µF at both winding sets abc and xyz. Here, both winding sets abc and xyz have the delta connected capacitor bank switched on at the same time at an operating speed of 1000 rpm. Voltage and current build up are illustrated in Fig.3a and Fig.3b. Simultaneously, excitation at both winding sets pushes the operating point at the magnetization curve into deeper saturation. IV. EFFECT OF SPEED VARIATION For this work, the six-phase to the three-phase transformer shown in Fig.1, was not utilized and each three-phase winding set (abc and xyz) was independently loaded with a specific resistive load. Contactors were provided to enable switching of the delta connected three-phase shunt capacitor to either only one of the three-phase winding sets or to both winding sets. The series capacitors, C se shown in Fig.1, were also removed during experimentation as a simple shunt. Experimental investigations are carried out for a simple shunt connected across winding set abc for different modes of operation, and when it is connected to both winding sets abc and xyz. The speed of the prime mover can be varied with specific resistive loads as elaborated in the next section. a. A. Variation of speed, while the one three- phase winding set abc connected across shunt capacitance (C sh =41 µF) with a resistive load and the other winding set xyz is kept open The SPSEIG can be loaded with a resistive load by closing the switch across abc winding at a given capacitance value, and the speed of the prime mover varied. Fig.1 allows for the collection of information about the relationship between load at winding set abc, the exciting capacitor at winding set abc and the speed. It shows the allowable speed range, and the generated voltages are improved by increasing the load resistance. If the load increases (resistance decreases) the voltage drops and may go to zero if the speed is not readjusted. For each curve, a careful evaluation of X m equal to the slope of the air-gap line will give an appreciation of the lower limit of the speed range beyond which the machine becomes unstable and losses its voltage, the higher limit being determined by the ratings of the machine. Fig.4a shows the values of voltage build up against speed for specific load resistance. It is seen that for each load resistance there exist a minimum and maximum speed beyond which voltage buildup with that specific terminal resistance is b. Fig.2 Self-excitation transients; (a) voltage and current build-up across winding sets abc of SPSEIG after switching on the delta connected bank of C sh =41µF at set abc only, (b) voltage and current build-up across winding set xyz of SPSEIG after switching on the delta connected bank of C sh =41µF at set abc only. a. 294 International Conference on Integrated Waste Management and Green Energy Engineering (ICIWMGEE'2013) April 15-16, 2013 Johannesburg (South Africa) Load voltage for different value of R impossible. Fig.4b shows the rotor speed versus frequency with specific load resistance. Fig.5a illustrates the terminal voltage and current transients at winding set abc that follows the speed changes from 1000 to 900 rpm, whose load is R L =440 ohm. Fig.5b. illustrates the terminal voltage and current transients at winding set abc that follows speed changes from 900 to 1000 rpm, whose load is R L =440 ohm. The variation in voltage and current with the change in speed for different loading conditions is depicted in table IV for steady-state reference. The same percentage change (reduction and increase respectively) in voltage and current was recorded for both conditions, i.e, when speed changes from 1000 to 900 rpm and also when speed changes from 900 to 1000 rpm. b. Fig.5 voltage and current transients at winding set abc with R L =440 ohm. (a) when speed changes from 1000 rpm to 900rpm, (b) when speed changes from 900 rpm to 1000 rpm. TABLE IV VARIATION IN VOLTAGE AND CURRENT WHEN SPEED CHANGES FROM 1000 TO 900 RPM AT DIFFERENT RESISTIVE LOADING: Speed Voltage Current R load reduction % reduction % reduction % 880 ohm 10 17 15 440 ohm 10 19 13 220 ohm 10 25 10 230 200 1-RL=880 ohm 2-RL=440 ohm 3-RL=220 ohm 3 2 170 140 1 110 B. Variation of speed, both winding sets abc and xyz connected with shunt capacitance (C sh1 = C sh2 = 25µF) and subjected to separate resistive loading Fig. 6a shows the variation of load voltage as a function of rotor speed when both the three-phase winding sets abc and xyz are excited. Characteristic curves are given for three different values of load resistances, R L = 154ohm, 281ohm and 563ohm. It is observed that load voltage decreases with the decrease in speed. Fig 6b. shows the variation of frequency as a function of rotor speed when both the threephase winding sets abc and xyz are excited for three different values of load resistances, R L = 154ohm, 281ohm and 563ohm. It is noticed that the frequency decreases with decrease in rotor speed. Fig.7 illustrates the voltage and current transients for both winding sets, when speed changes from 1000 rpm to 900 rpm. In Table V, the variation of speed from 1000 to 900 rpm is elaborated at three different values of resistance. It is clear from the table that with the speed reduction from 1000 to 900 rpm for the three values of load resistance, voltage regulation is improved as the load resistance increases. 80 50 750 800 850 900 950 1000 rotor speed(rpm) frequency for different value of R a. 50 3 2 40 1 30 20 750 1-RL=880 ohm 2-RL=440 ohm 3-RL=220 ohm 800 850 900 950 1000 rotor speed(rpm) load voltage for different value of R (V) b. Fig.4. Variation of load voltage (a), and frequency (b), as the function of rotor speed for different values of load resistance when winding set abc excited by shunt capacitance Csh=41µF is subjected to specific resistive load with winding set xyz kept open. 230 200 170 1-RL=563 ohm 2-RL=281 ohm 3-RL=154 ohm 3 2 140 1 110 80 50 800 850 900 rotor speed(rpm) 6 a. a. 295 950 1000 frequency for differenct value of R (Hz) International Conference on Integrated Waste Management and Green Energy Engineering (ICIWMGEE'2013) April 15-16, 2013 Johannesburg (South Africa) of the proposed method. The specific conclusions of this paper are summarized as follows. 1. The proposed methods provide the ability to analyze the unregulated behaviour of the SPSEIG with any prime mover by considering the effects of unregulated prime mover on the system performance. 2. For a loaded SPSEIG, there are also limiting values, which determine the range of C, u, and the load impedance over which self-excitation can be maintained. These extreme values can be computed by following the proposed method of analysis. 60 3 50 1 2 40 30 20 1-RL=563 ohm 2-RL=281 ohm 10 3-RL=154 ohm 0 800 850 900 950 1000 rotor speed (rpm) 6 b. Fig.6. Variation of load voltage (a) and frequency (b) of SPSEIG against rotor speed when the capacitor banks are connected to winding sets abc and xyz. REFERENCES [1] B. Palle, M. G. Simoes and F. A. Farret,”Dynamic simulation and analysis of Parallel self-excited induction generator for islanded wind frame systems,” IEEE Tans. Ind. Applicat., vol. 41, no. 4, pp. 1099– 1106, July/Aug. 2005. [2] F. A. Farret, B. Palle and M. G. Simoes,” Full expandable model of parallel self-Excited induction generators,” IEE Proc.-Electr. Power Appl., vol. 152, no. 1, pp. 96– 102, Jan. 2005. [3] Singh, G. K., “Self-excited induction generator research – a survey,” Electric Power Systems Research, vol. 69, pp.107-114, 2004 [4] Singh, G. K., “Multi-phase induction machine drive research – a survey,” Electric Power Systems Research, Vol. 61, pp. 139-147, 2002 [5] Y. Ai, M. J. Kamper, and A. D. Le Roux, “Novel direct field and direct torque control of six-phase induction machine with special phase current waveform,” in Conf. Rec. IEEE IAS Annu. Meeting, Tampa, FL, 2006,pp. 805–812. [6] Jones, M., and Levi, E., “A literature survey of state-of-the-art in multiphase ac drives,” Proc. 36th Univ. Power Eng. Conf. UPEC 2002, Stafford, U.K., pp. 505-510. [7] Singh, G. K., Yadav, K. B., and Saini, R. P., “Modeling and analysis of multi-phase (six-phase) self-excited induction generator,” Proc. IEEE Conf. The Eighth International Conference on Electrical Machines and Systems, ICEMS’05, Vol. 3, pp.1922-27, September 27-29, 2005. [8] Singh, G. K., Yadav, K. B., and Saini, R. P., “Analysis of a saturated multi-phase (six-phase) self-excited induction generator,” International Journal of Emerging Electric Power Systems, Vol. 7, pp.1-23, 2006. [9] Singh, G. K., “Modeling and experimental analysis of a self-excited sixphase induction generator for stand-alone renewable energy generation,” Int. Journal of Renewable Energy, Vol. 33, pp.1605-1621, 2008. [10] G.K.Singh, A.Senthil Kumar, R.P. Saini, “Steady-state modeling and analysis of six-phase self-excited induction generator for renewable energy generation,” Electric Power Components and Systems, vol. 38, Issue. 2, Jan. 2010, pp. 137-151. [11] Singh, G. K., Yadav, K. B., and Saini, R. P., “A Self-excited six-phase induction generator for stand-alone renewable energy generation,” Proc. IEEE International Agean Conference on Electric Machines, Power Electronics and Electromotions, ACEMP’07, pp. 690-695, Bordrum, Turkey, 10-12 September, 2007. [12] G.K.Singh, A.Senthil Kumar, R.P. Saini, “Performance evaluation of series compensated self-excited six-phase induction generator for standalone renewable energy generation,” Energy, vol. 35, Jan. 2010, pp. a. b. Fig.7. voltage and current transients at both windings sets excited with R L =563ohm and (a) when speed changes from 1000 rpm to 900 rpm (b) when speed changes from 900 rpm to 1000 rpm TABLE V. VARIATION IN VOLTAGE AND CURRENT WHEN SPEED CHANGES FROM 1000 TO 900 RPM AT DIFFERENT RESISTIVE LOADING R Load Speed Voltage Current reduction % reduction % reduction % 560 ohm 10% 20% 19% 280 ohm 10% 25% 15% 153 ohm 10% 27% 13% 288-297. V. CONCLUSION This paper has discussed steady-state and dynamic load performance of Six-Phase Self-Excited Induction Generator (SPSEIG) with capacitor excitation used in stand-alone micro hydro power generation. Effects of self-excitation, shunt capacitance, load impedance and speed have been studied. This paper has also presented both experimental and simulated results of the studied SPSEIG to validate the results 296