Chapter 5
advertisement

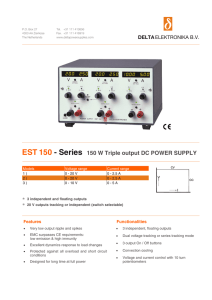
Chapter 5 Representation of Synchronous Machines for Stability studies The equations (3.149) – (3.157) and (3.161) - (3.162) of Chapter 3 representing the synchronous machine dynamics, equations (4.27) – (4.29), (4.54) - (4.55) and (4.65) given in Chapter 4 representing the dynamics of generator exciter, steam turbine and speed governor describes the complete behaviour of a steam generating system. However, the q -axis of the synchronous generator has to be located with respect to some reference in order to define the rotor angle. The synchronous generator terminal conditions like complex voltage, real and reactive power decide the rotor angle. The synchronous generator terminal conditions in turn depend on the interaction of the synchronous generator with the network conditions. While representing a synchronous machine in a system, the representation should include the dynamic behaviour of the generator as well as its interaction with the network. The effect of synchronous machine interaction with the rest of the network can be understood through the steady state conditions. 5.1 Steady State Condition In the steady state condition the rotor rotates at synchronous speed. Since rotor rotates at synchronous speed the damper winding currents I1d , I1q , I 2 q are zero. Since the synchronous generator is in steady state, left hand side of equations (3.149) to (3.157) will become zero. Hence, from equations (3.149) to (3.157) the following expression can be written Vd Rs I d q (5.1) Vq Rs I q d (5.2) E fd Eq' ( X d X d' ) I d (5.3) 1d Eq' ( X d' X ls ) I d (5.4) Ed' ( X q X q' ) I q (5.5) 2q Ed' ( X q' X ls ) I q (5.6) 5.1 Taking the d-axis flux linkage equations in the steady state we get d X d ( I d ) X md I fd (5.7) fd X md ( I d ) X fd I fd (5.8) Eliminating the filed current I fd from equations (5.7) and (5.8), equation (5.7) can be written d ( X d 2 X md X ) I d md fd X d' I d Eq' X fd X fd (5.9) Similarly, q X q' I q Ed' (5.10) Substituting equation (5.9) and (5.10) in equations (5.1) and (5.2) lead to Vd Rs I d X q' I q Ed' (5.11) Vq Rs I q X d' I d Eq' (5.12) Let the three-phase terminal voltage be given in per unit as vta Vm cos(s t ) vtb Vm cos(s t 120) (5.13) vtc Vm cos(s t 120) by applying Park’s transformation defined in Chapter 3, we get Vd Vm cos(s t s ) (5.14) Vq Vm sin(s t s ) 5.2 Here, s is the angle between the d -axis and the phase-a mmf axis. Let s s t 0 where 0 is the initial angle between the d -axis and the phase-a mmf axis at time t 0 , also noting that in per unit the RMS value of the voltage Vt and peak value of the voltage Vm are one and the same, equation (5.14) can be written as Vd Vt cos( 0 ) (5.15) Vq Vt sin( 0 ) From (5.15) it can be observed that though Vd ,Vq are scalar quantities, due the trigonometric nature of the equation the terminal voltage Vt can be represented as a ac phasor in dq axis. Just like an ac phasor in real and imaginary axis rotating at synchronous speed in electrical radians the dq axis also rotates at the speed of the rotor which is synchronous speed in steady state. Hence, the terminal voltage can be represented as a phasor in dq axis as Vt 0 Vd jVq (5.16) Where, Vt Vd2 Vq2 and angle 0 is the angle between the terminal voltage phasor and d axis as shown in Fig. 5.1. Instead of taking the angle between the d axis and terminal voltage phasor let us take the angle between the terminal voltage phasor and the q axis represented as 90 0 . Then we get Vd jVq Vt sin( ) j cos( ) Vt (5.17) 5.3 q-axis Vt 0 d-axis Fig. 5.1: Phasor diagram of terminal voltage in dq axis Here, Vt is a complex quantity in dq axis. Similarly, the stator current I t lagging the terminal voltage Vt by an angle , can be expressed as a phasor in dq axis as I d jI q I t sin( ) j cos( ) I t (5.18) Substituting equations (5.11) and (5.12) in equation (5.17), the following expression can be written Vt Rs I d X q' I q Ed' j Rs I q X d' I d Eq' (5.19) Rearranging terms in (5.19), the following expression can be derived as Vt Rs I d X q' I q Ed' j Rs I q X d' I d Eq' Rs ( I d jI q ) jX q ( I d jI q ) jX q ( I d jI q ) X q' I q Ed' j X d' I d Eq' 0 ' ' Rs jX q I t Ed X q X q I q Rs jX q I t j X q X d I d E fd E fd ' j X q X d I d X d X d I d Eq' …………………………………………………………………………… 5.4 (5.20) Noting that E fd X md V fd X md I fd , we can write equation (5.20) as R fd j X md I fd X d X q I d Vt Rs jX q I t let, (5.21) the internal voltage of the synchronous generator be represented as Eq X md I fd X d X q I d , or Eq j X md I fd X d X q I d then Eq Vt Rs jX q I t (5.22) Eq is defined as the internal voltage behind the synchronous reactance X q . Equation (5.22) can be represented as an equivalent electrical circuit as shown in Fig. 5.2. Xq Rs It Vt Eq Fig. 5.2: Electrical equivalent circuit of steady state synchronous generator From equation (5.22) it can be observed that the internal voltage phasor Eq is aligned along the q axis as shown in Fig. 5.3. Since Eq is aligned along q axis, it is at angle from the terminal voltage Vt . This angle is called as generator rotor or load angle. The load angle can be computed if the real power output Pt , reactive power output Qt and terminal voltage Vt of the synchronous generator are defined. Let us take terminal voltage as the reference and then locate the q axis 5.5 at an angle with respect to the terminal voltage phasor. The following steps should be followed X md I fd X d X q Id Eq q-axis jX q I t Vq Iq Rs I t Vt It Id Vd d-axis Fig. 5.3: Phasor diagram of the steady state synchronous generator Pt 2 Qt2 P , cos 1 t Vt Vt I t (5.23) Eq Vt 0 Rs jX q I t (5.24) It X q I t cos Rs I t sin Vt Rs I t cos X q I t sin Eq tan 1 (5.25) In case of steady state no load condition, the stator currents I d , I q will become zero and therefore the following expression holds Vq Eq Eq' E fd Vt d X md I fd (5.26) Vd Ed' q 0 (5.27) 5.6 Hence, in the steady state no load case the internal voltage Eq and the terminal voltage Vt are one and the same due to which the load angle becomes zero. As the load increase the load angle also increases. It can also be observed that for 1 pu , internal voltage or terminal voltage in steady state no-load condition the field current should be I fd 1 . X md The load angle computed in equation (5.25) is with respect to the dq -axis of a particular generator. In multi-machine systems there should be a common reference instead of multiple individual generator references. Usually in a network with multiple machines a slack bus or a reference bus is defined and all other bus angles in the network are defined with respect to the common reference bus. Hence there should be a conversion from dq -axis of individual generator to common reference in real-imaginary (RI) axis or it is conversion from machine reference frame to common network reference frame. VI I-axis Vt q-axis Vq d-axis Vd VR R-axis Fig. 5.4: Terminal voltage phasor in dq -axis and RI-axis The load angle previously was defined as the angle by which the q-axis leads the terminal voltage phasor but now it should be defined as the angle by which the q-axis lead the common reference R-axis. In steady state both dq -axis and RI-axis rotate at electrical synchronous speed hence the load angle in the new reference frame is fixed for a given load condition. Even in case of transients since the effect of rotor speed 5.7 variation on stator voltage is neglected the load angle can still be considered fixed. From the phasor diagram shown in Fig. 5.4 the following expression can be derived VR Vt cos Vd sin Vq cos VI Vt sin Vd cos Vq sin (5.28) Vt e j VR jVI Vd sin Vq cos j Vq sin Vd cos (Vd jVq ) sin j cos (Vd jVq )e (Vd jVq ) Vt e j 2 (5.29) j 2 Vt sin jVt cos (5.30) Hence, when ever the stator voltage current expressed in dq -axis needs to be transformed to network reference frame or RI-axis multiply the complex voltage or current in dq -axis with the factor e j 2 where the load angle is the angle between the q-axis of the individual generator with respect to the common reference phasor R-axis. To understand conversion from dq -axis to common reference let us take the case of a single machine connected to an infinite bus with a voltage V e j 0 through a transmission line with impedance RT jX T . Xq Eq e j 2 Rs ( I d jI q )e (Vd jVq )e j 2 XT j 2 RT P jQ Vt e j V e j 0 Fig. 5.5: Equivalent electrical circuit of single machine connected to an infinite bus The generator terminal voltage is Vt e j . Let the generator stator current be I t e j and the power factor angle is defined as . Both the angles and are taken with respect to the infinite bus voltage phasor. Let the generator supply a complex power P jQ to the infinite bus. From the equivalent circuit shown in Fig. 5.5 the following expressions can be written 5.8 I t e j Eq e P jQ Vt e j j 2 (5.31) (Vd jVq )e j 2 Rs jX q ( I d jI q )e Vt e Rs jX q I t e j j 2 (5.32) j Substituting Eq jEq j X md I fd X d X q I d in equation (5.32) we get jEq e j 2 Eq e j Vt e j Rs jX q I t e j (5.33) The load angle can be obtained from (5.33) and this angle is again with respect to the infinite bus voltage phasor. Equation (5.33) can also be represented as a phasor diagram as shown in Fig. 5.6. The network equations that is the relation between the terminal voltage, stator current and the infinite bus voltage can also be expressed in terms of dq -axis parameters as (Vd jVq )e (Vd jVq ) j 2 V e j 0 RT jX T ( I d jI q )e V e j 2 j 2 or RT jX T ( I d jI q ) (5.34) From equation (5.34) separating real and imaginary terms we can get Vd RT X T I d V sin Vq X T RT I q V cos (5.35) The real and reactive power generated by the generator in terms of dq -axis parameters is given as S P jQ Vt e j I t e j (Vd jVq )e * j 2 Vd I d Vq I q j Vq I d Vd I q 5.9 * j ( I d jI q )e 2 (5.36) The electrical torque output is given as, by substituting equation (5.1) and (5.2) for stator flux linkages, Te d I q q I d Vq Rs I q I q Vd Rs I d I d Vd I d Vq I q Rs ( I q2 I d2 ) P R I real Eq e 2 s t j (5.37) I e j * t It can be understood from equation (5.37) that the per unit electric torque produced is equal to the real power delivered by the dependent source Eq e j . X md I fd I-axis X d X q Id Eq q-axis jX q I t Vq Iq Vt Rs I t It Vd Id V R-axis d-axis Fig. 5.6: Phasor diagram of steady state synchronous generator connected to infinite bus 5.2 Multi-Machine System Representation In a power system there will be multiple synchronous machines with their respective exciters, turbines, speed governors and load distributed throughout the 5.10 system. The synchronous machines and load are connected through power system network that is through transformers and transmission lines. For a total system representation the system network model also should be included along with the synchronous machine, exciter, turbine, speed governor and static/dynamic load. Let there be a system with n number of buses. Let m represent number of load buses and ng number of generator buses and hence ng number of generators. The dynamics of an i th generator along with the exciter, steam turbine and speed governor are given as ( X ' X di" ) ( X di X di' ) I di ' di Eqi' ( X di' X lsi ) I di 1di 2 dt ( X di X lsi ) dEqi' ' Tdoi Eqi' (5.38) E fdi " Tdoi d 1di Eqi' ( X di' X lsi ) I di 1di dt ' Tqoi ( X qi' X qi" ) dEdi' ' ' Edi ( X qi X qi ) I qi ' Edi' ( X qi' X lsi ) I qi 2 qi 2 dt ( X qi X lsi ) (5.39) (5.40) d 2 qi " Tqoi dt Edi' ( X qi' X lsi ) I qi 2 qi (5.41) d i i base dt (5.42) 2 H i d i Tmi Tei Di i base base dt (5.43) VRi K Ei S Ei ( E fdi ) E fdi (5.44) TEi TAi dE fdi dt dVRi K K VRi K Ai RFi Ai Fi E fdi K Ai Vrefi Vti , VRiMin VRi VRiMax dt TFi dRFi K RFi Fi E fdi dt TFi TRHi TCHi (5.45) (5.46) K T dTMi K T TMi 1 HPi RHi PCHi HPi RHi PSVi dt TCHi TCHi dPCHi PCHi PSVi dt 5.11 (5.47) (5.48) TSVi dPSVi 1 PSVi Prefi dt RDi i Max 1 , 0 PSVi PSVi base (5.49) Stator algebraic equations are given as X di" I di X qi" I qi ( X di" X lsi ) ' ( X di' X di" ) Eqi ' 1di Vqi Rsi I qi ( X di' X lsi ) ( X di X lsi ) ( X qi" X lsi ) ( X qi' X lsi ) Edi' ( X qi' X qi" ) ( X qi' X lsi ) (5.50) 2 qi Vdi Rsi I di (5.51) Here, i 1, 2.........ng . These ng generators are connected to the network. In a power system network with n number of buses, the injected current at all the n buses can be written in terms of admittance matrix and the bus voltages. The current injected at i th bus is given as, where i 1, 2.........n , n I i Yij e ij V j e j j j (5.52) j 1 Where, Yij e j ij is the (i, j ) element of the admittance matrix. V j e j j is the bus voltage at j th bus. The complex power injected at i th bus can be written as n Pi jQi Vi e ji I i VV i jYij e * j i j ij (5.53) j 1 The injected power at any bus is the difference between the power generated at that bus minus the load power required at that bus. Hence, at i th bus the injected real and reactive power can be written as Pi PGi PDi VV i jYij cos i j ij (5.54) Qi QGi QDi VV i j Yij sin i j ij (5.55) n j 1 n j 1 5.12 Where, PGi , QGi are the real and reactive power generated at i th bus and PDi , QDi are the real and reactive power loads. The real and reactive power generated at a generator bus is given as * j i j 2 i PGi Real Vi e I di jI qi e I diVi sin( i i ) I qiVi cos( i i ) (5.56) * j i QGi Imaginary Vi e ji I di jI qi e 2 I diVi cos( i i ) I qiVi sin( i i ) (5.57) In case static loads they can be represented as a function of the bus voltage as was explained in Chapter 4. Then equation (5.56) and (5.57) can be written as I diVi sin( i i ) I qiVi cos( i i ) PDi (Vi ) VV i j Yij cos i j ij (5.58) I diVi cos( i i ) I qiVi sin( i i ) QDi (Vi ) VV i j Yij sin i j ij (5.59) n j 1 n j 1 for, i 1, 2,......, ng , generator buses PDi (Vi ) VV i j Yij cos i j ij (5.60) QDi (Vi ) VV i jYij sin i j ij (5.61) n j 1 n j 1 For, i ng 1, ng 2,......, n , for load buses. Dynamic equations (5.38) to (5.49), stator algebraic equations (5.50) to (5.51) and network power balance equations (5.58) to (5.61) together are called as differential algebraic equations (DAEs) and completely define the behaviour of multi- 5.13 machine power system. In case the loads are dynamic loads then apart from equation (5.38) to (5.49) and (5.58) to (5.61) the dynamic equations of the loads should also be considered. 5.2.1 A special case of impedance loads If loads are represented as constant impedance loads then DAEs given in equations (5.38) to (5.49) and (5.58) to (5.61) can be simplified to a significant extent. Suppose load at an i th bus is represented by an impedance load then, the real and reactive power drawn by the load is given as Vi 2 Z Li (5.62) PLi jQLi Vi * Vi * Z Li (5.63) PLi jQLi I Li Where, PLi , QLi , Z Li are the real power, reactive power and impedance of a load at an i th bus. Substituting equation (5.63) in (5.52), the current injected into i th bus can be expressed as n Vi j j I i I Gi I Li I Gi * Yij e ij V j e j Z Li j 1 (5.64) Let YLi Z Li1 , then n I Gi YLi e j Li Vi e ji Yij e ij V j e j j j j 1 n 0 YLi e j Li Vi e ji Yij e ij V j e j 1 j j j i 1, 2,......., ng i ng 1 , ng 2 ,......., n 5.14 (5.65) (5.66) Let a new admittance matrix be formed with the load impedances included as . The equation (5.65) and (5.66) can shunt branches at each bus, represented as YBUS be represented as V1 I G1 V I ng Gng YBUS Vn 0n g 1 g 1 0n Vn (5.67) The network voltages and the generator currents can be represented in terms of the generator internal voltages by making modifications to equations (5.67). This will eliminate the generator currents and terminal voltages in dynamic equations given in equations (5.38) to (5.49) reducing the complexity. This also has another advantage when transient stability analysis is done and this will be explained later. At an i th generator bus an additional node is created marked as i with a voltage Ei Edi" jEqi" e j i 2 , representing the generator internal voltage. The impedance between i i nodes is given as RSi jX di . Hence, ng numbers of additional nodes are added to the existing n nodes. The currents injected at these nodes are given as 1 I i I Gi RSi jX di j i " " 2 Vi e ji E jE e di qi j i " ji 1 1 " 2 Edi jEqi e Vi e RSi jX di RSi jX di i 1, 2......, ng (5.68) i 1, 2,......., ng Note that since i is an additional node connected to an i th generator node, it is simply represented with a number same as that of the generator node to which it is connected but with a prime to differentiate it. Also, now the additional nodes are the generator nodes injecting a current into the network and at all other network buses the 5.15 current injection is zero. Equation (5.68) can be included in the equation (5.67) which leads to 1 1 0 0 0 0 (1,ng 1) RS 1 jX d1 (1, n ) RS 1 jX d1 E 0 I G1 1 1 0 ( ng , n ) ( n , n 1) 1 g g 0 0 RSng jX dng RSng jX dng I Eng Gng 1 0 Y (1,1) Y (1, n ) Y (1, n 1) Y (1, n) V 01 RS 1 jX d1 BUS BUS g BUS g BUS 1 0 (ng ,1) (ng , ng ) YBUS (ng , ng 1) (ng , n) Vn YBUS YBUS 1 YBUS g 0 ng RSng jX dng 0n Vng 1 g 1 ( ng 1,1) YBUS ( ng 1, ng ) YBUS ( ng 1, ng 1) YBUS (ng 1, n) 0( ng 1,1) 0( ng 1, ng ) YBUS 0n Vn YBUS (n,1) ( n, n g ) (n, n) YBUS YBUS 0( n ,ng ) YBUS 0( n ,1) (n, ng 1) Let, 1 R jX 0 d1 S1 , YII 1 0 RSng jX dng ng ng 1 0 0(1,n 1) RS 1 jX d1 g YIN 1 0( ng , ng 1) 0 RSng jX dng 5.16 0(1,n ) 0 ( ng , n ) ng n YBUS (1,1) (1, ng ) YBUS (1, ng 1) (1, n) YBUS YBUS YBUS Y (n ,1) Y n n Y n n Y n n ( , ) ( , 1) ( , ) BUS g g BUS g g BUS g BUS g YBUS (ng 1, n) (ng 1,1) YBUS (ng 1, ng ) YBUS (ng 1, ng 1) YBUS Y (n,1) YBUS ( n, n g ) (n, n) YBUS YBUS (n, ng 1) BUS I G1 IG I Gng 1 ng E1 , E E ng 1ng V1 V ng , VN Vn g 1 Vn 1n Then, YII YIN E IG T ' 0 ng n 1 YIN YBUS ng n ng n VN ng n 1 (5.69) From equation (5.69) it can be seen that, 1 ' YINT E VN YBUS (5.70) 1 ' YINT E I G YII YIN YBUS (5.71) From equation (5.70) and (5.71) it can be observed that the network voltages and the generator currents, represented by the vector VN and I G , can be obtained directly from the internal voltages vector E without the need to solve stator algebraic and network power balance equations. 5.17 5.2.2 Initial Conditions Before doing any stability analysis the system along with its generators, loads and network should be initialized. These are the steps which should be followed for initializing the system Step 1 The network real and reactive power balance equations given in equations (5.58) to (5.61) should be solved. Solving equations (5.58) to (5.61) is nothing but doing load flow analysis. After load flow analysis all the network bus complex voltages, real and reactive powers injected at a bus are know. Step 2 Find the internal load angle of each generator. This can be done as following Ei e ji Vi e ji Rsi jX qi I Gi e jGi i 1, 2,.....ng (5.72) After load flow analysis the network bus voltages are known. The currents generated by each generator are also known. With this information an internal voltage can be defined for all the generators as given in equation (5.72). The internal load angle i of an i th generator is the angle of the complex internal voltage Ei e ji . Step 3 Calculate the d , q axis components of voltages, currents and fluxes Vdi Vi sin i i (5.73) Vqi Vi cos i i (5.74) I di I Gi sin i Gi (5.75) 5.18 I qi I i cos i Gi (5.76) Edi' Vdi Rsi I di X qi' I qi (5.77) Eqi' Vqi Rsi I qi X di' I di (5.78) E fdi Eqi' ( X di X di' ) I di (5.79) 1di Eqi' ( X di' X lsi ) I di (5.80) 2qi Edi' ( X qi' X lsi ) I qi (5.81) K Fi E fdi TFi RFi (5.82) VRi K Ei S Ei ( E fdi ) E fdi Vrefi (5.83) VRi Vi K Ai (5.84) i base (5.85) PSVi Prefi (5.86) PCHi PSVi (5.87) TMi PCHi (5.88) Tei TMi (5.89) The synchronous machine model along with the exciter, turbine and speed governor model given in (5.38) to (5.49) can be simplified significantly my making some assumptions. This simplification can lead to significant reduction in computational complexity [1]-[2]. The various models that can be derived by simplifying equations (5.38) to (5.49) is given below 5.3 Sub-transient Model with Stator and Network Transients Neglected The rate of changes of the stator flux linkages d , q (here dot means rate of change with respect to time) in equation (3.149) and (3.150) in Chapter 3, can be neglected. The reason behind this is that the stator, which is connected to the rest of 5.19 the network electrically, has very fast transients as compared to the rotor. Compared to the slow dynamics of the rotor the stator dynamics can be considered to be very fast and hence any change or disturbance in the stator or the network can be considered as an instantaneous change without any dynamics. This leads to reduction in computational complexity drastically as the network transient also need not be considered along with stator transients. With these assumptions the synchronous machine dynamics along with exciter, turbine and governor are given as q Vd Rs I d (5.90) d Vq Rs I q (5.91) Vo Rs I o 0 (5.92) ( X ' X d" ) Eq' ( X d X d' ) I d ' d Eq' ( X d' X ls ) I d 1d E fd 2 dt ( X d X ls ) dEq' Tdo' (5.93) Tdo" d 1d Eq' ( X d' X ls ) I d 1d dt Tqo' ( X q' X q" ) dEd' Ed' ( X q' X ls ) I q 2 q Ed' ( X q X q' ) I q ' 2 dt ( X q X ls ) (5.94) d 2 q Tqo" dt Ed' ( X q' X ls ) I q 2 q (5.95) (5.96) d base dt (5.97) 2 H d Tm Te D base base dt (5.98) VR K E S E ( E fd ) E fd (5.99) TE TA dE fd dt dVR K K VR K AVin VR K A RF A F E fd K A Vref Vt dt TF dRF K RF F E fd dt TF TRH K T dTM TM 1 HP RH dt TCH (5.100) (5.101) K HPTRH PSV PCH TCH 5.20 (5.102) dPCH PCH PSV dt dP 1 TSV SV PSV Pref dt RD TCH (5.103) 1 s (5.104) ( X d" X ls ) ' ( X d' X d" ) d X I ' 1d Eq ' ( X d X ls ) ( X d X ls ) " d d q X I " q q ( X q" X ls ) ( X q' X ls ) E ' d ( X q' X q" ) ( X q' X ls ) (5.105) 2q (5.106) Equations (5.90), (5.91) can be substituted in (5.105) and (5.106) which lead to X d" I d X q" I q ( X d" X ls ) ' ( X d' X d" ) Eq ' 1d Vq Rs I q ( X d' X ls ) ( X d X ls ) ( X q" X ls ) ( X q' X ls ) Ed' ( X q' X q" ) ( X q' X ls ) 2 q Vd Rs I d (5.107) (5.108) Now by multiplying equation (5.107) by complex number j1 and adding both equation (5.107) and (5.108) lead to ( X q" X ls ) ' ( X q' X q" ) " 2q Ed ' X q I q ' ( X q X ls ) ( X q X ls ) Vd Rs I d j Vq Rs I q ( X " X ls ) ' ( X d' X d" ) 1d j X d" I d d' Eq ' ( X d X ls ) ( X d X ls ) (5.109) Rearranging the terms, we can get " E " ' " " ' " " ( X q X ls ) ' ( X q X q ) ( X X ls ) ' ( X d X d ) " 2 q j d' 1d Ed ' Eq ' ( X q X d ) I q ' ( X q X ls ) ( X q X ls ) ( X d X ls ) ( X d X ls ) Vd jVq Rs jX d" I d jI q E " Vd jVq Rs jX d" I d jI q …………………………………………………………………………… 5.21 (5.110) Equation (5.110) can be further simplified by assuming that the effect of saliency during sub-transient is negligible on the voltage E " that is it can be assumed that X q" X d" . This assumption is very useful in multi-machine system stability analysis. With this assumption equation (5.110) can be written as E " Ed" jEq" Vd jVq Rs jX d" I d jI q (5.111) Where, Ed" ( X q" X ls ) ( X q' X ls ) Ed' ( X q' X q" ) ( X q' X ls ) 2 q , Eq" ( X d" X ls ) ' ( X d' X d" ) 1d Eq ' ( X d' X ls ) ( X d X ls ) Equation (5.111) when expressed in RI-axis can be represented as Ed" jEq" e j 2 Vd jVq e j 2 Rs jX d" I d jI q e j 2 (5.112) Equation (5.112) can be represented as a dynamical electrical circuit, as shown in Fig. 5.7. Where, E jE e " d " q j 2 is a dependent voltage source behind the sub- transient reactance X producing a current I d jI q e " d of Vd jVq e j 2 j 2 with a terminal voltage . X d" Rs I d jI q e j 2 Vd jVq e E " d jE e " q j 2 j 2 Fig. 5.7: Dynamic electrical equivalent circuit of synchronous generator sub-transient model 5.22 The per unit torque is equal to the real power delivered by the dependent source Ed" jEq" e j 2 , which is * j j " " 2 2 Te real Ed jEq e I d jI q e (5.113) Ed" I d Eq" I q 5.4 Transient or Two-Axis Model The sub-transient generator model can be further simplified. The sub-transient time constants Tdo" , Tqo" corresponding to the damper windings 1d , 2q are very small as compare to the transient time constants Tdo' , Tqo' . Hence, the sub-transient time constant Tdo" , Tqo" can be set zero in equation (5.94) and (5.96). This leads to d 1d Eq' ( X d' X ls ) I d 1d 0 dt 1d Eq' ( X d' X ls ) I d Tdo" Tqo" d 2 q dt 2q (5.114) Ed' ( X q' X ls ) I d 2 q 0 Ed' ( X q' (5.115) X ls ) I q Substituting equation (5.114) and (5.115) in equation (5.93) to (5.106) the following expression can be obtained Tdo' Tqo' dEq' dt Eq' ( X d X d' ) I d E fd (5.116) dEd' Ed' ( X q X q' ) I q dt (5.117) d base dt (5.118) 5.23 2 H d Tm Te D base base dt (5.119) VR K E S E ( E fd ) E fd (5.120) dE fd TE dt dVR K K VR K AVin VR K A RF A F E fd K A Vref Vt dt TF TA dRF K RF F E fd dt TF (5.121) (5.122) K T dTM K T TM 1 HP RH PCH HP RH PSV dt TCH TCH dP TCH CH PCH PSV dt dP 1 TSV SV PSV Pref 1 dt RD s (5.124) d X d' I d Eq' (5.126) q X q' I q Ed' (5.127) (5.123) TRH (5.125) Substituting equation (5.90) and (5.91) in equation (5.126) and (127) lead to Vd Rs I d X q' I q Ed' (5.128) Vq Rs I q X d' I d Eq' (5.129) Multiplying equation (5.129) with j1 and adding it to equation (5.128) gives V d jVq Rs jX d' I d jI q X ' q X d' I q Ed' jEq' (5.130) Expressing equation (5.130) in RI-axis lead to, with the additional assumption that X d' X q' . Ed' jEq' e j 2 Vd jVq e j 2 Rs jX d' I d jI q e 5.24 j 2 (5.131) X d' Rs I d jI q e V d Ed' jEq' e j 2 jVq e j 2 j 2 Fig. 5.8: Dynamic electrical equivalent circuit of synchronous generator transient model The dynamic electrical equivalent circuit of the synchronous generator transient model is shown in Fig. 5.8. The electrical torque is given as * j j ' ' 2 2 Te real Ed jEq e I d jI q e (5.132) Ed' I d Eq' I q 5.5 Flux Decay or One-Axis Model The transient model can be further simplified by neglecting the damper windings 1q and considering only the dynamics of field winding alone. This is also justified as the time constant Tqo' is less compared to the time constant Tdo' and hence can be set to zero in equation (5.117) and with this assumption equation (5.116) to (5.127) can be written as Tdo' dEq' dt Eq' ( X d X d' ) I d E fd (5.133) d base dt (5.134) 2 H d Tm Te D base base dt (5.135) 5.25 TE TA dE fd dt VR K E S E ( E fd ) E fd (5.136) dVR K K VR K AVin VR K A RF A F E fd K A Vref Vt dt TF (5.137) dRF K RF F E fd dt TF (5.138) K T dTM K T TM 1 HP RH PCH HP RH PSV dt TCH TCH dP TCH CH PCH PSV dt dP 1 TSV SV PSV Pref 1 dt RD s (5.140) d X d' I d Eq' (5.142) q X q Iq (5.143) (5.139) TRH (5.141) Substituting equation (5.90) and (5.91) in equation (5.142) and (5.143) lead to Vd Rs I d X q I q (5.144) Vq Rs I q X d' I d Eq' (5.145) Multiplying equation (5.145) with j1 and adding it to equation (5.144) and expressing in RI-axis gives X q X ' d I q jE e ' q j 2 Vd jVq e j 2 Rs jX ' d I d jI q e j 2 (5.146) The dynamic electrical equivalent circuit of flux decay model is given in Fig. 5.9. 5.26 X d' Rs I d jI q e V d X q X d' I q jEq' e j 2 jVq e j 2 j 2 Fig. 5.9: Dynamic electrical equivalent circuit of synchronous generator flux decay model 5.6 Classical or Constant Flux Linkage Model This is the simplest model but not very accurate. This model is useful in case of very large power systems. In case of dynamic studies with a time period less than that of Tdo' are considered then the field winding dynamics can also be neglected. In the flux decay model in equation (5.133), if we assume that during the period of study the voltage behind the transient reactance X d' , E ' d jEq' , is constant and only the electro-mechanical equations (5.134) and (5.135) need to be considered. The transient voltage is computed at steady state, Ed' _ ss jEq' _ ss , and kept constant throughout the study. The input mechanical torque Tm is assumed to be constant and hence the turbine and turbine governor dynamics are eliminated. Hence, the dynamic equations of the model can be written as d base dt (5.147) 2 H d Tm Te D base base dt (5.148) The dynamic equivalent circuit of the classical model is shown in Fig. 5.10 5.27 X d' Rs I d jI q e V d Ed' _ ss jEq' _ ss e j 2 jVq e j 2 j 2 Fig. 5.10: Dynamic electrical equivalent circuit of synchronous generator classical model 5.28 Example Problems E1. A three-phase, 50 Hz, synchronous generator is connected to an infinite bus through a transformer and two parallel transmission lines. The generator is transferring a complex power of 1 j 0.25 to the infinite bus. Vt t X T 0.15 X L 0.2 V 10 P jQ 1 j 0.25 The generator parameters are given below: X d = 0.8, X q = 0.7, X ls = 0.2, X d' = 0.3, X q' = 0.55, Rs = 0.0025, K A = 20, K E = 1.0, TE = 0.36, K F = 0.125, TF = 1.8 Initialize the synchronous generator Sol: The current drawn by the infinite bus can be computed as following It ft = P - jQ = 1- j 0.25 = 1.038-14.036 V¥0 The terminal voltage of the synchronous generator is given as 5.29 (E1.1) Vt qt = V¥ + j ( X t + 0.5´ X L ) It ft = 1.091513.24 (E1.2) The internal voltage of the synchronous generator is given as Eqd = Vt qt + ( Rs + jX q ) It ft = 2.453652.607 (E1.3) The rest of the synchronous generator variables can be initialized as following Vd Vt sin t 0.6923 (E1.4) Vq Vt cos t 0.8438 (E1.4) I d I t sin t 0.9463 (E1.6) I q I t cos t 0.4086 (E1.7) Ed' Vd Rs I d X q' I q 0.4699 (E1.8) Eq' Vq Rs I q X d' I d 1.1288 (E1.9) E fd Eq' ( X d X d' ) I d 2.5482 (E1.10) 1d Eq' ( X d' X ls ) I d 1.0341 (E1.11) 2q Ed' ( X q' X ls ) I q 0.3269 (E1.12) RF KF E fd 0.1769 TF (E1.13) VR K E S E ( E fd ) E fd 2.5482 Vref (E1.14) VR Vt 1.2189 KA (E1.15) i base 314.159 rad / s (E1.16) PSV Pref 1.0 (E1.17) PCH PSV 1.0 (E1.18) TM PCH 1.0 (E1.19) Te TM 1.0 (E1.20) 5.30 E2. A 5 bus power system has two synchronous generators and one load as shown in the figure below. The generators are connected at bus-1 and bus-4. The load is connected at bus-5. The per unit reactances of the connecting branches are mentioned in the figure. The load is consuming a complex power of 1.8 j 0.65 at a voltage 0.9811.53 . Assuming the load to be constant impedance type, convert the system admittance matrix to reduced admittance matrix with only internal nodes. 1 X d' j 0.20 j 0.15 2 3 j 0.25 j 0.2 4 X d' j 0.35 j 0.4 j 0.18 5 V5 0.9811.53 1.8 j 0.65 Sol: The system admittance matrix can be written as é- j 6.67 j 6.67 0 0 0 ù ê ú ê j 6.67 - j13.16 j 4 0 j 2.50 ú ê ú YBUS = êê 0 j 4 - j13.55 j 5 j 5.55 úú ê 0 j5 - j5 0 0 úú ê ê 0 j 2.5 j 5.55 0 j8.05úúû ëê (E2.1) Since the load is considered as impedance type, the load impedance can be included in the admittance matrix. The load admittance should be added to the 5th row-5th column of the admittance matrix. The load admittance can be found as following: IL = P - jQ V5* = 1.8 - j 0.65 = 1.932 - j 0.2828 0.98-11.53 5.31 (E2.2) V Z L = 5 = 0.4720 + j 0.1704 IL (E2.3) 1 = 2.0444 - j 0.8295 ZL (E2.4) YL = The system admittance matrix can now be changed as é- j 6.67 j 6.67 ù 0 0 0 ê ú ê j 6.67 - j13.16 j 4 j 2.50 ú 0 ê ú YBUS = êê 0 j 4 - j13.55 j 5 j 5.55 úú ê 0 ú j5 - j5 0 0 ê ú ê 0 j 2.5 j 5.55 0 2.0444 + j 7.2205úúû êë (E2.5) In order to reduce the system to internal nodes first add additional buses representing generator nodes. The generator internal nodes are connected to the respective generator terminal buses through the direct axis transient reactance. With the generator internal nodes added the system admittance matrix changes to éYGG YGN ù ú Y = êê ú ' ëêYNG YBUS ûú (E2.6) Where, é 1 ê ê j 0.2 YGG = ê ê ê 0 êë ù é 1 ú êú T êê j 0.2 ú , YGN = YNG ê 1 ú ê ú 0 êë j 0.35 úû 0 ù 0ú ú ú ú 1 0 0ú j 0.35 úû 0 0 0 0 é- j11.67 j 6.67 0 0 0 ù ê ú ê j 6.67 - j13.16 j 4 j 2.50 ú 0 ê ú ' YBUS j 4 - j13.55 j 5 j 5.55 úú = êê 0 ê 0 j5 - j 7.8571 0 0 úú ê ê 0 j 2.5 j 5.55 0 2.0444 + j 7.2205úúû êë 5.32 The reduced admittance matrix can be computed as ( ' YRED = YGG - YGN YBUS -1 ) é 0.0343 - j 2.0289 0.0281 + j 0.0788ù ú (E2.7) YNG = ê êë 0.0281 + j 0.0788 0.0230 - j1.5819 úû In the reduced system only two buses are present, which are the internal buses of the respective generators, hence the size of the admittance matrix is 2´ 2 . 5.33 References 1. M. Stubbe, A. Bihain, J. Deuse and J. C. Baader, “STAG-A new unified software program for the study of the dynamic behavior of electrical power systems,” IEEE Trans., Vol. PWRS-4, No. 1, pp. 129-138, 1989. 2. P. Kundur and P. L. Dandeno, “Implementation of advanced generator models into power system stability programs,” IEEE Trans., Vol. PAS-102, pp. 2047-2052, July 1983. 5.34