PID Controller Design with Constraints on Sensitivity Functions
advertisement

Proceedings of the 2006 American Control Conference
Minneapolis, Minnesota, USA, June 14-16, 2006
WeA08.3
PID Controller Design with Constraints on Sensitivity Functions Using
Loop Slope Adjustment
Daniel Garcia*, Alireza Karimi*, Roland Longchamp* and Sebastián Dormido**
Abstract— This paper presents a PID controller design
method for stable minimum-phase systems. The approach is
similar to the one proposed in the so-called modified ZieglerNichols method, where only one point on the frequency response
of the plant is measured and then moved to the desired position
on the unit circle. This technique provides the specified phase
margin and crossover frequency to the closed-loop system.
However, the ratio between integral and derivative time is
not fixed prior to the design in the proposed approach. This
ratio is chosen is order to obtain the desired loop slope
at the crossover frequency. Constraints on the infinity-norm
of sensitivity functions are used to shape the loop transfer
function and to determine the corresponding loop slope value.
The proposed method, which is based on Bode’s integral
relationships for the slope adjustment, does not require any
parametric model of the plant and can be applied with only
modest effort.
I. INTRODUCTION
The conventional PID controllers are undeniably the most
commonly used control algorithm for industrial processes. In
spite of their very simple structure, they can often provide
satisfying closed-loop stability and performances as long as
their parameters are properly chosen.
Nowadays many different methods exist for the design
of such controllers. The simplicity of the PID structure,
which consists of only three parameters, constraints however
the design method to be not very complex. Among the
techniques currently available, the modified Ziegler-Nichols
[1] method has this advantage of simplicity and is known
to work well in many situations in process control. The
approach is very intuitive and can be applied with only
modest effort. It only requires the knowledge of the point
on the frequency response of the plant that corresponds to
the desired crossover frequency. This point can be moved
by the controller to a desired position on the unit circle in
order to satisfy a phase margin specification. Two equations
for phase and amplitude assignment are obtained and can be
solved to find the parameters of the controller. An additional
equation, which specifies the ratio between integral and
derivative time, should however be introduced in order to
obtain a unique solution. In the modified Ziegler-Nichols
* D. Garcia, A. Karimi and R. Longchamp are with the Laboratoire
d’Automatique, Ecole Polytechnique Fédérale de Lausanne (EPFL), 1015
Lausanne, Switzerland. {daniel.garcia, alireza.karimi,
roland.longchamp}@epfl.ch.
The work of these authors is financially supported by the Swiss National
Science Foundation under grant No. 2100-064931.01.
** S. Dormido is with the Dpto de Informática y Automática, UNED, c\
Juan del Rosal 16, 28040 Madrid, Spain. sdormido@dia.uned.es.
The work of this author is financially supported by the Spanish CICYT
under grant DPI 2004-01804.
1-4244-0210-7/06/$20.00 ©2006 IEEE
method, this ratio is chosen to be constant, i.e, Ti = αTd . The
closed-loop stability and performances are heavily influenced
by the choice of α [2]. In [1] it has been shown that the
ratio α = 4 is appropriate for many industrial processes.
For some systems, however, it has been pointed out in [3]
that better results are obtained with an α parameter in the
vicinity of 2.5. One problem associated with the modified
Ziegler-Nichols is that the ratio α is specified prior to the
controller design, without any a priori information of the
process dynamics. Only one point on the Nyquist curve of
the loop can then be positioned by the method, and the curve
cannot be shaped more precisely. In [2], a design procedure is
proposed in order to overcome this problem and to shape the
Nyquist curve between the crossover and critical frequencies.
The design procedure however requires a parametric model
of the plant and thus looses the advantage of simplicity.
Recently, in [4], [5] it has been shown how the slope of
the Nyquist curve at the crossover frequency can be adjusted,
without any model of the plant. The design is based on
Bode’s integrals and only requires the knowledge of the
frequency response of the plant at the crossover frequency
as well as its static gain. This approach is used in this paper.
The main contribution of this work is to shape the frequency
response of the loop, based on constraints on the infinitynorm of the sensitivity and complementary sensitivity functions. A closed-loop experiment is provided to measure the
point on the Nyquist curve of the plant corresponding to the
desired crossover frequency. The modified Ziegler-Nichols
method is then used to obtain the required phase margin.
The ratio between integral and derivative time is designed
to impose, in the Nyquist diagram, the slope of the loop
frequency response, which is chosen according to constraints
on the infinity-norm of sensitivity functions.
This paper is organized as follows: Section II recalls the
modified Ziegler-Nichols method as well as the procedure
for adjusting the loop slope at the crossover frequency.
The choice of the slope to shape the loop transfer function
according to sensitivity constraints is explained in Section
III. In Section IV the measurement procedure for identifying
the plant at the chosen crossover frequency is presented. A
simulation example is then provided in Section V to illustrate
the approach. Finally, some concluding remarks are offered
in Section VI.
II. PRELIMINARIES
This Section recalls briefly the so-called modified ZieglerNichols method. It also underlines that PID controllers
have more parameters than required for the design problem.
268
0.5
Finally it explains how this supplementary degree of freedom
can be used to shape the Nyquist plot of the compensated
system, without any model of the plant.
B. Loop Slope Adjustment
The slope ψ of the Nyquist curve of the loop transfer
function L(jω) at the frequency ωc is equal to the phase of
the derivative of L(jω) with respect to the frequency at ωc .
The derivative of the loop transfer function with respect to
the frequency is computed as follows:
dL(jω)
dK(jω)
dG(jω)
= G(jω)
+ K(jω)
(3)
dω
dω
dω
0
Imaginary Axis
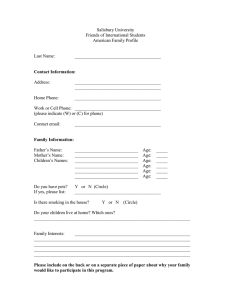
A. Phase Margin Adjustment
Suppose that, for a given unknown system, specifications
on crossover frequency ωc and phase margin Φ are known.
Reasonable values for such design parameters are usually
easy to find: A phase margin specification does not depend
on the system structure and parameters, and is habitually
chosen between 40◦ and 60◦ . For the crossover frequency, a
specified value is not a priori known and depends especially
on the plant dynamics. Since the crossover frequency is
closely related to the rise time and thus to the bandwidth
of the closed-loop system, guiding rules on its choice based
on a specification on these performance indicators can be
formulated [6].
The amplitude and phase of the plant at the crossover
frequency ωc can then be measured with the procedure proposed in Section IV. The modified Ziegler-Nichols method
can now be used to adjust the phase margin. One obtains the
following equations for the controller parameters [1]:
cos(Φ − ϕc − π)
(1)
Kp =
|G(jωc )|
1
T d ωc −
= tan(Φ − ϕc )
(2)
T i ωc
where ϕc is the phase of G(jωc ). Eq. (2) has usually
an infinity of solutions for the parameters Ti and Td . In
order to have a unique solution, an additional equation has
been introduced in the modified Ziegler-Nichols method:
Ti = αTd . The choice of α influences heavily the closedloop performances and stability. This fact may be illustrated
with an example. Consider a plant with given closed-loop
specifications on phase margin and crossover frequency.
Suppose that three controllers are obtained, by solving Eq.
(1) and (2) with three different values for the parameter
α. Resulting Nyquist plots will show similar behaviors as
those depicted in Fig. 1. It can be seen, that the three curves
pass effectively through a common point and ensure a given
phase margin and crossover frequency. Nevertheless, stability
and performances of the three designed closed-loop systems
differ passably since the loops are shaped very differently.
The parameter α should thus be chosen in order to shape
appropriately the Nyquist curve of the compensated system.
Recently, it has been proposed in [5], [4], to design the
ratio between integral and derivative time in order to obtain
the desired loop slope at the crossover frequency. This design
is briefly recalled hereafter.
−0.5
−1
−1.5
−1
−0.5
0
0.5
Real Axis
Fig. 1.
Influence of the parameter α on the loop frequency response.
which gives after some calculations:
1
dL(jω)
= Kp G(jω) j(Td + 2 )
dω
ω Ti
1
)
+ 1 + j(Td ω −
ωTi
d ln |G(jω)|
d∠G(jω)
×
+j
dω
dω
(4)
Hence, the slope of the Nyquist curve at ωc is given by:
ψ= ∠
dL(jω) = ϕc + arctan
dω ωc
(Td Ti ωc2 + 1) + (Td Ti ωc2 − 1)sa (ωc ) + sp (ωc )Ti ωc
sa (ωc )Ti ωc − (Td Ti ωc2 − 1)sp (ωc )
(5)
where ϕc = ∠G(jωc ) and sa (ωc ) and sp (ωc ) are defined as
follows:
d ln |G(jω)| sa (ωc ) = ωc
(6)
dω
ωc
d∠G(jω) sp (ωc ) = ωc
(7)
dω
ωc
Straightforward calculation brings the following result for the
relation between integral and derivative time for the specified
loop slope ψ at the crossover frequency:
269
Td = [sa (ωc ) − 1 + sp (ωc ) tan(ψ − ϕc )
− Ti ωc (sp (ωc ) − sa (ωc ) tan(ψ − ϕ0 ))]
× [ωc2 Ti (1 + sa (ωc ) + sp (ωc ) tan(ψ − ϕ0 ))]−1
(8)
Eq. (8) and (2) give for the derivatives time Td :
1
[(sa (ωc ) − sp (ωc ) tan(Φ − ϕc ))
2ωc
× tan(ψ − ϕc ) + (1 − sa (ωc )) tan(Φ − ϕc )
− sp (ωc )] (9)
sa (ωc ) ≈
2
∠G(jωc )
π
sp (ωc ) ≈ ∠G(jωc ) +
m
It is thus possible, if the slope of amplitude and phase
sa and sp of the plant are known at ωc , to design the
Nyquist plot of the loop transfer function with the desired
slope at the crossover frequency. In [5], [4] it is shown
for stable minimum phase systems, how these slopes can
be approximated with an adequate precision for controller
design without any model of plant. The approximations
which are based on the Bode’s integrals, only require the
knowledge of the plant at the crossover frequency as well
as its static gain. The following expressions are obtained for
the slopes:
0.75
M , φ [rad]
Td =
1
0.5
0.25
0
0
0.25
0.5
Mc
0.75
1
Fig. 2. Lower bound of Mm (dashed line) and Φ in radian (solid line) in
function of the Mc value.
1.5
(10)
2
[ln |Kg | − ln |G(jωc )|]
π
1
Imaginary axis
where Kg stands for the plant static gain.
In the following Section, it will be shown how the slope
ψ can be chosen in order to appropriately shape the loop.
This design is based on constraints on the infinity-norms of
the sensitivity functions.
0.5
1
(− 1−M
2 , 0)
c
0
Φ
ψ
Mc
1−Mc2
-0.5
-1
III. SENSITIVITY CONSTRAINTS
-1.5
Consider the complementary sensitivity function T (s) and
the sensitivity function S(s) which express respectively the
closed-loop transfer function from set-point to process output
and the closed-loop disturbances amplification:
T (s) =
L(s)
,
1 + L(s)
S(s) =
1
1 + L(s)
(11)
It is well-known that the loci for constant values of |T | and
|S| are represented in the complex plane by circles [6].
In the following, the notations introduced in [6] will be
used for the complementary modulus margin Mc and the
modulus margin Mm . They represent respectively the inverse
of the infinity-norm of the complementary sensitivity and
sensitivity functions:
Mc = ||T ||−1
∞,
Mm = ||S||−1
∞
(12)
Consider now only one specification on Mc . This corresponds in the complex plane to a prohibited disk for the
frequency response of the loop. The radius rc and center cc
of the disk are given as follows [6]:
rc =
Mc
,
1 − Mc2
cc = (−
1
, 0)
1 − Mc2
(13)
It can be shown that a specification on Mc also ensures
a lower bound for Mm , which guarantees the closed-loop
-3
-2
-1
0
1
Real axis
Fig. 3.
Tangency condition at the loop crossover frequency.
stability, as well as for the phase margin Φ:
Mm ≥
Mc
1 + Mc
Φ ≥ − arccos
(14)
Mc2 − 2
2
+π
(15)
These lower bounds of Mm and Φ in function of Mc are
depicted in Fig. 2.
A necessary condition for a given specification on Mc to
be achieved is the tangency condition. In other words, the
Nyquist curve of the loop must be tangent to the prohibited
disk defined by the specification. The key idea of this design
procedure is to choose the loop frequency response to be
tangent to the prohibited disk at the crossover frequency ωc .
The loop slope ψ at ωc will then be determined according
to the tangency condition (see Fig. 3).
The specification on Mc is however not given by the user.
Only the phase margin Φ and the crossover frequency are
explicitly specified. However, since for each phase margin,
only one Mc circle exists, which crosses the unit circle at
the corresponding point, the Mc value is unique. It can be
270
0
1.5
d
_
-d
e−T s
G(s)
Imaginary axis
1
0.5
0
Φ
-0.5
ψ
Fig. 5.
Fig. 4 depicts this circle for a given value of Mm and Mc .
Now with the given specification on Φ, it is possible to do
exactly the same procedure as for the Mc circle. It consists
in determining the circle satisfying Eq. (20) and (21), which
intersects the unit circle at the point corresponding to the
phase margin. This circle includes the specified Mm circle
and the largest possible Mc circle. It can be determined by
solving the following equation:
-1
-1.5
-3
-2
-1
0
1
Real axis
Fig. 4.
Circle including both the Mm and Mc circles.
determined by solving the corresponding equation of the
circle:
Mc2
1
2
2
)
+
y
=
(16)
(x +
1 − Mc2
(1 − Mc2 )2
with:
x = cos(Φ − π),
y = sin(Φ − π)
Relay plus additional time delay feedback system.
(17)
In the complex plane, x + iy is the point on the unit circle
corresponding to the phase margin Φ. From Eq. (16), and
(17) one obtains:
Mc4 +Mc2 (−3 − 2 cos(Φ − π))+2+2 cos(Φ−π) = 0 (18)
which is a second order equation for Mc2 with only one
positive solution for Mc .
Now that the Mc circle crossing the unit circle at the point
corresponding to the phase margin is known, it remains to
compute its slope at this intersection. This slope in radian is
given by the following equation:
cos Φ + cc ψ = arctan −
(19)
sin Φ
where cc stands for the center of the Mc circle according to
Eq. (13). Now the PID controller can be design using Eq.
(1), (2), (9), (18) and (19), .
Remark: Instead of defining specifications on Φ
and ωc , specifications can be given on Mc and
ωc . Then the phase margin will be imposed by the
intersection of the Mc circle with the unit circle.
The problem can easily be generalized to other circles.
Suppose that, for a specific problem, a modulus margin larger
than the lower bound given by Eq. (14) is specified. For each
value of Mc , it is then possible to compute the smallest circle
in the complex plan that include both the Mm and Mc circle.
Radius and center of this circle are given as follows:
1
rcm = 0.5 −1 + Mm −
(20)
Mc − 1
1
,0
(21)
ccm = 0.5 −1 + Mm +
Mc − 1
2
(x − ccm )2 + y 2 = rcm
(22)
where x and y are defined according to Eq. (17). Equation
(22) can be solved analytically and has only one positive
solution for Mc . Then the slope of the circle at this intersection is computed and the frequency response of the loop
is then designed to be tangent to the circle at the crossover
frequency.
IV. MEASUREMENT PROCEDURE
For the proposed controller design procedure, the static
gain of the plant as well as the amplitude and phase of the
plant at the chosen crossover frequency ωc have to be known.
The static gain is very simple to measure (for example by
performing only one step response) and is thus assumed to
be known. To measure the frequency response of the plant
at the crossover frequency different experiments exist, either
in open loop or in closed-loop. In this paper, a closed-loop
relay experiment is used for the measurement. Relay methods
have usually been well accepted by the industrial world
because, compared to open-loop solutions, the sensitiveness
to disturbances is reduced, and the implementation of such
structures are simpler.
The standard relay method [7] provides the knowledge
of the critical point and frequency of a system. In order to
identify points on the Nyquist plot of the plant corresponding
to other frequencies an additional time delay is inserted in
the loop [8]. Figure 5 depicts the resulting closed-loop relay
experiment, where G(s) represents the unknown plant, T
the additional time delay (T > 0) and d is the amplitude of
the relay output. The influence of the time delay T on the
frequency response of the plant G(s) consists on moving
each point of the Nyquist plot of the plant, by adding a
phase lag, which is proportional to the frequency and to the
value of the time delay. As a result, the critical point and
frequency of the equivalent plant can be changed by varying
the time delay T . By choosing appropriately the time delay
T , the purpose of the method is to make the system oscillate
at the chosen frequency ωc , in order to identify G(jωc ). The
271
_
k
Imaginary axis
.
1
s
_
0
_
a)
0.5
δ
e−T s
G(s)
0
0
-0.5
-0.5
-1
-1.5
Nonlinear scheme for improving the measurement precision.
-2.5
-2.5
-1
-0.5
0
Tk−1 − Tk−2
ωk−1 − ωk−2
0.5
1
1.5
-3
-1.5
-1
-0.5
0
0.5
1
1.5
Real axis
Fig. 7. Nyquist plots (Dashed line: modified Ziegler Nichols, solid line:
proposed design).
problem is solved iteratively as explained hereafter, using the
secant algorithm:
1) Choose two different initial values for the time delay
T (T0 and T1 ). The value T0 is usually chosen to
be 0 and T1 > 0. Then two relay experiments can
be performed with the two time delay values. Each
experiment results in a limit cycle with the frequency
ω0 or ω1 which corresponds respectively to the time
delay T0 and T1 .
2) The time delay parameter is updated iteratively using
the secant algorithm:
Tk = Tk−1 + (ωc − ωk−1 )
-1.5
-2
Real axis
Fig. 6.
-1
-2
3
-1.5
b)
0.5
Imaginary axis
ε
(23)
where k represent the iteration number. A new relay
experiment can then be performed with the obtained
time delay, and the frequency ωk of the obtained limit
cycle can be determined.
3) Repeat the previous step until the obtained frequency
is closed enough to the desired one: |ωk − ωc | < η,
where η is a small positive number that represents the
absolute tolerance.
Remark: The secant algorithm is derived from
the Newton-Raphson algorithm. The derivative is
simply replaced in the secant algorithm by a quotient of differences. However, convergence conditions remain the same as for the classical NewtonRaphson method. In particular, the secant method
has a quadratic convergence rate near the solution.
There is however, one problem associated with the closedloop relay experiment (see Fig. 5). It is the generation by
the nonlinear relay element of higher order harmonics that
cannot be completely attenuated by the low-pass behavior
of the plant. By considering then only the first harmonic of
the signals with the describing function analysis, it leads
to identification errors. In order to improve considerably
the measurement precision, another nonlinear closed-loop
structure can be used (see Fig. 6). In this scheme, the relay
element is replaced by a saturation nonlinearity and a time
varying gain k [9]. The main idea of this scheme is to
automatically tune the gain k with an empirical adaptation
law in order to obtain the critical gain kkr of the resulting
system G(s)e−T s . Convergence analysis as well as guiding
rules on the choice of the parameters δ and ε are provided in
[9]. Different simulation examples and real-time experiments
[9], [10] show that this scheme leads to accurate results in
only few oscillations.
The iterative procedure based on the secant algorithm
associated with the structure of Fig. 6 allows to identify
with high accuracy the point on the frequency diagram of
a given plant G(s) corresponding to the given frequency
ωc . Furthermore, the time needed for the experiment is
reasonable since the secant algorithm converges usually in
less than 5 iterations to a frequency sufficiently near to the
desired one.
V. SIMULATION EXAMPLES
A simulation example is now provided to illustrate the
design method.
Consider the first-order process plus dead time proposed
1
e−0.2s . The specifications are set at
in [2]: Gp (s) = s+1
3 rad/s for the crossover frequency and 60◦ for the phase
margin. The measurement procedure presented in Section IV
is used to measure the point on the frequency response of
the plant corresponding to the desired crossover frequency.
A first controller is then designed using the modified ZieglerNichols method. This controller moves the point G(3j) of
the Nyquist curve of the plant to the point of K(jω)G(jω)
on the unit circle with the phase of 60◦ − 180◦ .
Now it is desired to adjust the controller parameters with
the proposed method. First the Mc circle which intersects the
unit circle at the point corresponding to the phase margin of
60◦ is considered. Solving Eq. (18) one obtains Mc = 1.
This value corresponds to a degenerated circle (radius rc =
∞) which is the line parallel to the imaginary with the real
coordinate of −0.5. Its slope at the crossover frequency is
thus ψ = 90◦ . The controller is then designed by using this
slope for the loop at the crossover frequency. The resulting
Nyquist curve is depicted in Fig. 7 a) and compared with the
result provided by the modified Ziegler-Nichols method.
A complementary modulus margin of 1 ensures a lower
bound equals to 0.5 for the modulus margin. Suppose now
that we want to give a larger specification for this one: Mm =
272
even if the slope is perfectly adjusted, the tangency condition
is not a sufficient condition for the curve to stay outside a
circle. The curve can enter the circle at other frequencies.
This can be the case for complex high-order systems, where
specifications may be satisfied just locally at the crossover
frequency and the behavior changes drastically elsewhere
leading to poor results. However, since the method needs the
same informations as the modified Ziegler-Nichols method
plus the plant static gain, it can constitute a good alternative
to this method when it does not provide appropriate results.
Furthermore the specifications can be chosen in a very simple
way (phase margin and crossover frequency) like in the
modified Ziegler-Nichols method, and the problem solution
is very easy, since it only requires to solve some algebraic
equations.
1
0.8
0.6
0.4
0.2
0
0
1
2
3
Time [s]
4
5
6
Fig. 8. Closed-loop step responses (dashed-dotted line: modified ZieglerNichols, solid line: proposed design with specification on Mc , dashed line:
proposed design with specification on Mc and Mm ).
TABLE I
S IMULATION RESULTS .
Method
Mod. Z-N
Specification Mc
Specification Mc , Mm
Kp
3.07
3.07
3.07
Ti
0.5203
1.016
0.6658
Td
0.13007
0.0258
0.0834
Mc
0.85
0.99
0.91
Mm
0.57
0.61
0.65
0.6. Specifications on phase margin and crossover frequency
are however preserved. Now we can find with Eq. (22), (20)
and (21) the circle which includes both the given Mm and
the largest possible Mc circle and which intersects the unit
circle at Φ. The corresponding Mc is found to be 0.875. The
slope ψ of the circle at the intersection is then chosen for
the loop slope at the crossover frequency. Again the achieved
loop frequency response is shown in Fig. 7 b) and compared
with the results of the modified Ziegler-Nichols method. The
different circles are also depicted in the figure. It should be
remarked here that, by introducing a circle which includes
the two sensitivity circles, conservatism is introduced.
Step responses obtained in closed-loop with the modified
Ziegler-Nichols and the proposed controllers are compared
in Fig 8. These curves show that both proposed controllers
improve the time-domain performances of the closed-loop
system in terms of overshoot and settling time. Furthermore,
the Nyquist plots (see Fig. 7) show that the frequency
responses with both proposed controllers are appropriately
shaped in the frequency range, which is crucial for closedloop stability and performances. Details of the design as
well as obtained values for the modulus and complementary
modulus margin are shown in Table I. It should be noted that
the obtained results are very close to the desired requirements
for the infinity-norm of the sensitivity functions. For different
reasons however, the proposed method cannot ensure these
desired values. On the one hand, the Bode’s integrals are
used to adjust the loop slope without any model of the plant.
These relations are not exact and consequently the obtained
slope can differ from the desired one. On the other hand,
VI. CONCLUSIONS
An similar approach to the one given by the well-known
modified Ziegler-Nichols method is presented in this paper.
However, instead of considering a fixed ratio between the
integral and derivative time, the ratio is adjusted to obtain the
desired loop slope at the crossover frequency. As a result, the
loop transfer function can be shaped, in this frequency range,
according to constraints on the infinity-norm of sensitivity
function. Compared to the modified Ziegler-Nichols method,
this procedure requires only one more information about the
plant, which is its static gain. It can thus be applied without
the need of any parametric model of the system to stable
minimum phase plants. This procedure can be considered
as an attractive alternative approach to the modified ZieglerNichols method to improve considerably the achieved stability and performances for systems where satisfactory results
cannot be obtained with the traditional method.
R EFERENCES
[1] K. J. Aström and T. Hägglund, Advanced PID Control. Instrument
Society of America, 2006.
[2] K. K. Tan, T. H. Lee, and Q. G. Wang, “Enhanced automatic tuning
procedure for process control of PI/PID controllers,” AIChE journal,
vol. 9, no. 42, pp. 2555–2562, September 1996.
[3] B. Kristiansson and B. Lennartson, “Optimal PID controllers including
roll off and Schmidt predictor structure,” in 14th Triennial World
Congress, Beijing, P.R. China, 1999, pp. 297–301.
[4] A. Karimi, D. Garcia, and R. Longchamp, “PID controller tuning using
Bode’s integrals,” IEEE Transactions on Control Systems Technology,
vol. 11, no. 6, pp. 812–821, 2003.
[5] ——, “PID controller design using Bode’s integrals,” in ACC, FP13-6,
May 2002, pp. 5007–5012.
[6] D. Garcia, A. Karimi, and R. Longchamp, “PID controller design with
specifications on the infinity-norm of sensitivity functions,” in 16th
IFAC World Congress, July, 2005.
[7] K. J. Aström and T. Hägglund, “Automatic tuning of simple regulators
with specifications on phase and amplitude margins,” Automatica,
vol. 20, no. 5, pp. 645–651, 1984.
[8] A. B. con Voda and H. Roux-Buisson, “Another version of the relay
feedback experiment,” J. Proc. Cont., vol. 7, no. 4, pp. 303– 308,
1997.
[9] M. Saeki, “A new adaptive identification method of critical loop gain
for multi-input multi-output plants,” 37th IEEE CDC, vol. 4, pp. 3984–
3989, 1998.
[10] A. Karimi, D. Garcia, and R. Longchamp, “Iterative controller tuning
using Bode’s integrals,” in CDC, FrM07-6, December 2002, pp. 4227–
4232.
273