Modal Analysis of the Forced Response
advertisement

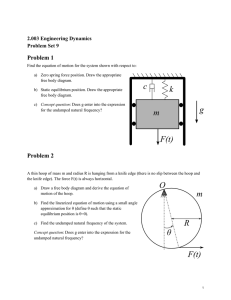
MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) Winter term - 2008 THE UNIVERSITY OF WESTERN ONTARIO DEPARTMENT OF MECHANICAL AND MATERIAL ENGINEERING MME 425b “Mechanical Vibrations” Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) 1. Objectives The objective of this experiment is to help students understand basic concepts in underdamped free and forced (harmonic excitation) vibrations of a single degree of freedom system (SDOFS). Students will estimate the level of damping present in the system via logarithmic decrement method using free response, and frequency response of forced vibration. After completing the experiment, you should be able to: y Have an understanding of underdamped free vibration behaviour of a SDOFS. y Have an understanding of forced vibration of a SDOFS subjected to harmonic excitation. y Understand angular vibration measurements using a potentiometer and LabView-based data acquisition system. 2. Principles and background The single degree of freedom system in this exercise involves a rotating imbalanced force that provides a single frequency harmonic excitation. The schematic of the lumped parameter system is shown in Figure 1. F (t ) c mm k m o e θ me lm ld lk l Figure 1. Single degree freedom system 1-6 MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) Winter term - 2008 The equation governing the angular motion of the beam about the center of rotation, O, can be derived as: I oθ + cld2θ + klk2θ = me eω 2lm cos ω t . Here the mass moment of inertia, I o about the center, can be expressed as: 1 I o = I beam + I mass = ml 2 + mmlm2 , 3 where (1) (2) mm and m denote the mass of the motor assembly and mass of the beam, respectively, while ω represents the rotational speed of the disk. Product me e signifies the amount of imbalance associated with the motor rotation. Refer Figure 1 for other parameters. 3. Apparatus y Vibration Demonstration Apparatus y D.C. Variable motor speed control y Potentiometer and electric wire y Computer with LabView y Stopwatch y Stick ruler y Weights 2-6 MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) Winter term - 2008 Part A- Prediction of Damping using Logarithmic Decrement – Free Response (i) Observe type of vibration: Initiate a free vibratory motion to the system by pressing the beam down and releasing. You will notice that the system is vibrating. What type of vibration can you observe? (ii) Find the undamped natural frequency, ωn : Remove the damper from the system and initiate vibration as above case (i). Then, count the number of cycles of vibration in a certain time using stopwatch. What is the undamped system natural frequency? (iii) Estimate damping ratio, ζ: Reinstall the damper to the system and produce an underdamped free response plot shown as Figure 2 using LabView. Measure the values of two amplitudes (Xi and Xi+n) and the number of cycles, n. Draw the underdamped free response plot manually on the Logbook, and mark the selected amplitude (Xi and Xi+n) on the plot. Then, determine the damping ratio ζ ln using the following equation: Xi 2π nζ = , X i +n 1− ζ 2 Xi X i+n Figure 2. Example of underdamped free response 3-6 (3) MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) 4-6 Winter term - 2008 MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) Winter term - 2008 Part B- Prediction of Damping using a Forced Response Equation (1) can be rearranged as: θ + 2ζω nθ + ωn2θ = where me eω 2lm cos ωt I0 (4) me represents the eccentric mass that produces the sinusoidal excitation, and the undamped natural frequency ωn and the damping ratio ωn = ζ are given as follows: klk2 , I0 (iv) Find the undamped natural frequency, ζ = cld2 2 I o klk2 . (5) ωn : Measure the values of following parameters using stick ruler: - distance of spring about the center of rotation, lk , - distance of damper about the center of rotation, - distance of mass about the center of rotation, ld , lm . Other values of parameters are given in the Log book. Estimate the spring stiffness, k , using the stick ruler and provided weighs, and Calculate the mass moment of inertia, I o , using equation (2). Then, calculate the undamped system natural frequency using equation (5). Compare your answer with the value predicted using free response (ii). (v) Estimate damping ratio, ζ: We can estimate the damping ratio using steady state response amplitude at a known frequency of excitation. To do this, consider an excitation frequency (frequencies are suggested in the Logbook for two cases) and take measurement of the response angular amplitude Θ at the considered frequency. 5-6 MME 425b Mechanical Vibration Experiment #1: Single Degree of Freedom System (Free and Forced Vibrations) Winter term - 2008 Draw the frequency response of the system on the Logbook, and mark the selected frequencies and amplitude manually. From equation (4), the amplitude response can be derived as: Θ= where β= ω ωn and me eω 2lm /( klk2 ) (1 − β 2 ) 2 + (2ςβ ) 2 (5) , θ = Θ cos(ωt − φ ) . Considering the gear ratio (gear ratio = motor frequency/disk frequency = 3.23) and potentiometer gain (360 degree = 5 V), estimate the damping ratio, ς using equation (5). (vi) Predict the damping ratio based on the ratio of amplitudes taken at two frequencies (one close to the resonance and one high frequency value). Under these conditions, the useful ratio can be derived from equation (5) as: Θ β =high Θ β =1 = 2ζ (6) 5 Data analysis and discussion for Report (1) Does the vertical excitation force given in the handout represent the excitation completely? Explain your answer. (2) Compare the undamped damping ratio obtained by the free response method and the forced response method. Are they similar? If not, explain the differences and the possible experimental errors. (3) Show the derivation of equation (6). 6-6