Frequency and Time Interval Measurements
advertisement

Frequency and Period Measurement
l
ω
transmitter
receiver
t
vt
l= 2
Frequency Counter
Display
Memory
Strobe
Input
Input
Signal
Processor
Decade
counter
Reset
Gate
Time base
Input
Gate
Output
N
f =
t
t
N pulses
Time Base
Crystal
Oscillator
Circuit (OSC)
Frequency
Divider
Time base
signal
•Non-compensated OSC
•Temp. compensated OSC
•Oven-type OSC
Quartz crystal
High Q ~ 10000
symbol
Equivalent circuit
4-bit Binary
Counter
A
State decoder
ABCD
B
C
D
Time base
Crystal
Oscillator
Circuit (OSC)
10 Hz
100 Hz
1 kHz
Frequency
Divider
1s
0.1 s
0.01 s
Time base
signal
Logic Diagram of a time
base for a frequency counter
“0000”
State 0
Reset
“0010”
2
Open
gate
“1100”
12
Close
gate
“1110”
14
Store
ABCD
ABCD
ABCD
Input Signal Processing
Output
(Digital)
Comparator
Input
(Analog)
Input
(Analog)
Amplifier
Amplifier
Comparator
(Schmitt
Trigger)
Output
(Digital)
Schmitt Trigger: Comparator with Hysteresis
Vo
Vref
+
Vin
V(1)
Trigger level
(Vref)
Vo
output
V(0)
Vin
Vref
Vo
R2
R3
R1
+
Vin
V(1)
Vo
Vref
VTH
VTL
V(0)
VTL VTH
Vin
output
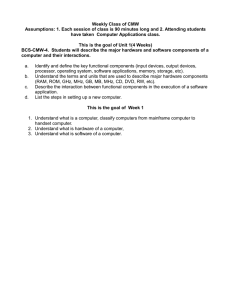
Period Measurement
Time base
f = 1 MHz
Time base
f = 1 MHz
1 µs
1 µs
X pulses
counted
T
Digital measurement of time period
T = (X pulses)(1 µs)
= X µs
Y pulses
counted
PW
Digital measurement of pulse width
PW = Y µs
Period Measurement (between pulses)
start
Signal A
Input Signal
Proccessor
Gate
S
Count
Counter
Q
stop
Signal B
Input Signal
Proccessor
R
1 MHz
Control circuit
100 kHz
A (start)
B (stop)
Gate
CLK
Count
Core system
S
0
1 kHz
0
1
10 kHz
1
CLK
t
R
Q
0 Not use
1
1
0
0
1 No change
Period Measurement (pulse duration)
Vref
start
+
stop
Vref
Amp
A
+
C
S
B
D
R
Q
Gate
S
0
0
1
1
R
Q
0 No change
1
0
0
1
1 Not use
Comparator
start
A
B
C
D
stop
input
Control
circuit
Gate
Counter
CLK
Period Measurement (pulse period)
V(1)
A
Input
High-pass
filter
A
B
C
D
B
+
-
J
C
K
SET
CLR
Q
D
Gate
Q
Comparator
V(1) = 5 V
V(0) = 0 V
+2.5 V
-2.5 V
V(1) = 5 V
V(0) = 0 V
V(1) = 5 V
V(0) = 0 V
Measurement Error
1) Gating error (± 1 count)
Frequency measurement
If fin = 10 Hz, Gate time = 1 s
Display count: 10±1 counts
If fin = 1000 Hz, Gate time = 1 s
Display count: 1000±1 counts
5 pulses
6 pulses
Gate open
If fx < fo Period measurement
if fx > fo Frequency measurement
fc: clock frequency fx: unknown frequency
Period meas.: the number of pulses (Np)
Np = fc/fx
Frequency meas.: with 1 s gate time the number of pulses (Nf)
Nf = f x
The crossover frequency (fo) Np = Nf
fc/fo = fo; fo =√fc
Measurement Error
2) Time-base Error
•Oscillator calibration errors
•Short-term crystal stability errors
(voltage transient, shock, vibrate, temperature)
•Long-term crystal stability errors
(aging, deterioration of crystal)
National Institute of Standards and Technology, 60 kHz
∆F
Loran-C, a navigation signal at 100 kHz
Slope~ 10-6deg
Receiver
Fequency
Multiplier
Phase
Detector
Local
Frequency
Source
Recorder
Slope~ 10-9deg
Adjustment
10
20
30
40
50
Time
(weeks)
Ex A frequency counter with an accuracy of ± 1 LSD ± (1×10-6) is employed to measure
frequencies of 100 Hz, 1 MHz, and 100 MHz. Calculate the percentage measurement
error in each case.
At f = 100 Hz
error = ± (1 count ± 100 Hz × 10-6)
= ± (1 count ± 1 × 10-4 count)
≈ ± 1 count
% error = ±
1
× 100%
100 Hz
= ± 1%
At f = 1000 Hz
error = ± (1 count ± 1 MHz × 10-6)
= ± (1 count ± 1 count)
= ± 2 count
% error = ±
2
× 100%
1 MHz
= ± 2 × 10-4 %
At f = 100 MHz
error = ± (1 count ± 100 MHz × 10-6)
= ± (1 count ± 100 count)
= ± 101 count
% error = ±
101
× 100%
100 MHz
= ± 1.01 × 10-4 %
Time base
error
Time base output
Low frequency
High frequency
Low frequency
error
± 1 pulse
High frequency
error
± X pulse
Measurement Error
3) Trigger Level Error (Noise)
-Use large signal amplitudes and fast rise time
Trigger
level
Trigger
level
∆T Noisy signal
Cleaned signal
Maximum accuracy could be obtained by
1) use period measurement if fx < fc
use frequency measurement if fx > fc
2) Calibrate regularly to prevent long-term stability error
3) Reduce trigger level error in time measurement by using
large signal and fast rise time
Hysteresis
band
UTP
LTP
'clean' sine wave crosses
the hystereis band twice
during each cycle triggering counting
circuits once per cycle
Noisy sine wave crosses
the hystereis band more
than twice during each
cycle - produce counting
error
Attenuated noisy wave
form crosses the
hystereis band twice
during each cycle
UTP
LTP
PW
Measured PW
A low amplitude input pulse
can produce errors in pulse
width measurement
PW
Measured PW
Amplification of the input
pulse minimizes the pulse
width measurement
Ex จงหา resolution และคาความถี่สูงสุดที่สามารถแสงผลไดในเครื่องวัด
ความถี่ที่มีการแสดงผลแบบ 7 หลัก ถาเวลาของสัญญาณเกตถูกตั้งไวที่ 1
วินาที (resolution = 1 Hz, Max. freq. = 9,999,999 Hz)
Ex เครื่องวัดความถี่เครื่องหนึ่งมีความผิดพลาดจากการนับ ±1 ครั้ง (±1 count)
และมีความผิดพลาดจากฐานเวลา 5 สวนในลานสวน (ppm: part per million)
จงหาคาเปอรเซ็นตความผิดพลาดเมื่อใชวัดความถี่ 1 kHz
ความผิดพลาดรวมเทากับผลรวมของความผิดพลาดทั้งสอง
ความผิดพลาด = ± (1 count + 1 kHz x 5 ppm)
= ± (1 count + 0.005 count)
คาเปอรเซ็นตความผิดพลาด = ± 1.005
1000 x 100 = 0.1%
Specifications of a freq./period Measurement
Frequency mode
Range:
DC to 50 MHz
Gate time: Manual 1 ms to 100 s in decade step
Automatic up 1 s gate time
Period mode
Range:
1 µs to 1 s unit in µs
Duration mode
Range:
Inputs:
100 ns to 104 s
2 channels for start signal and 1 channel
for stop signal
Extending the frequency range of a counter
Prescaler (upto 1.5 GHz)
10 - 100
MHz
÷10
1-10
MHz
10 MHz
Frequency
Counter
Reduce resolution but can be improved by extending gate time
Heterodyne Technique
frequency
selector
100 MHz
Harmonic
Generator
Input
Signal (f2)
Tuned
Cavity
100 MHz – 5GHz (f1)
Counter
Low Pass
Filter
f1 ± f2
Amp.
f1 - f2
Homodyne and Heterodyne technique
½ {cos [2π( f2- f1 )]t +
cos [2π( f2+ f1 )]t}
sin2π f1 t
sin2π f2 t
If f1 = f2; Homodyne
1
1
0.8
Time
domain
0.5
0.6
0.5
1
1.5
0.4
2
-0.5
0.2
-1
0
Amplitude
Amplitude
Frequency
domain
0.5
f1
f
0
difference
1
1.5
2
sum
2f1
f
Homodyne and Heterodyne technique
If f1 ≠ f2; Heterodyne
Time
domain
1
0.75
0.5
0.5
0.25
0.5
1
1.5
2
-0.25
0.5
1
1.5
2
-0.5
-0.5
-0.75
0
Amplitude
Frequency
domain
Amplitude
-1
f1
f2
f
0
f2 - f1
f1 + f2
f
Automatic Heterodyne Unit
Ex input freq. 2.1 GHz
1.0 GHz
A
500 MHz
1.5 ± 2.1 =3.6, 0.6 GHz
2.0 ± 2.1 =4.1, 0.1 GHz
1.5 GHz
ft = 500 MHz
2.0 GHz
Harmonic
Generator
Switch
2.5 GHz
To 500 MHz
Counter
Low
Pass
Filter
Level
Detector
3.0 GHz
X5
Control
logic
3.5 GHz
100 MHz
from
Frequency
Counter
f
Level
Detector
Input
500 MHz - 4 GHz
Accuracy
Prescaler
Displayed freq. =
Accuracy ∝ t
fin
t
N
fin: input freq.
N : divider of prescaler
t : gate time
exactly the same as the counter
without a prescaler
Heterodyne Technique
Q
Gate time, t =
fc
Q : Time-base Divisor
fc : Time-base Clk freq.
N : Harmonic number
Input freq., fin = f in′ ± Nf c
Q
Q
= f in′ ± NQ = f in′ t ± NQ
Displayed freq. = fin
fc
fc
Accuracy ∝ t; (NQ is constant)
Computing Counter
Input
Gate
Input
Signal
Processing
A
Counter
B
Counter
Precision
Clock
Time
Base
Computer
Count in A
Input freq. =
Count in B
Input time =
Count in A
Clk freq.
Period/
Frequency
Display
9 Opening and Closing gate are controlled from either the
input signal or the internal clock.
9 Computer will help to determine whether freq./period will be
performed.