LIGO-P080057-P
Physics Letters A 372 (2008) 5727–5731
Contents lists available at ScienceDirect
Physics Letters A
www.elsevier.com/locate/pla
Numerical calculations of elastic modes frequencies for parametric oscillatory
instability in Advanced LIGO interferometer
S.E. Strigin a,∗ , D.G. Blair b , S. Gras b , S.P. Vyatchanin a
a
b
Physics Department, Moscow State University, Moscow 119991, Russia
School of Physics, The University of Western Australia, Crawley, WA 6009, Australia
a r t i c l e
i n f o
Article history:
Received 2 June 2008
Accepted 17 June 2008
Available online 9 July 2008
Communicated by V.M. Agranovich
a b s t r a c t
We discuss the importance of accurate numerical calculation of elastic modes in the mirrors of Advanced
LIGO to enable precise predictions of the problem of parametric oscillatory instability. We propose
accuracy estimations through use of analytical solutions based on Chree–Lamb modes. Small deviations
from cylindrical test mass shape may produce splitting of non-axial symmetric elastic modes into
doublets. This splitting may increase the possibility of parametric oscillatory instability.
© 2008 Elsevier B.V. All rights reserved.
1. Introduction
The full scale operational terrestrial laser interferometer gravitational wave LIGO antennae have achieved sensitivity, expressed
in terms of the metric perturbation amplitude, of approximately
∼ 3 times better than the planned level of h 1 × 10−21 [1,2] in
100 Hz bandwidth (see the current sensitivity curve in [3]). In Advanced LIGO (to be realized by approximately 2014), the acoustic
mirror noise will be improved and the optical power circulating in
the resonator will be increased up to W 830 kW, enabling the
sensitivity to reach a value of h 1 × 10−22 [4,5]. The high optical
power combined with extra low mechanical losses in mirrors may
result in undesirable effect of parametric oscillatory instability. This
effect, first analyzed for FP cavities [6], causes the excitation of
high order (Stokes) optical modes having frequency ω1 and mirror
elastic modes with frequency ωm . Instability appears when optical energy stored in the main mode, with frequency ω0 , exceeds a
certain threshold. The frequencies are related by ω0 ω1 + ωm .
Later E. D’Ambrosio and W. Kells pointed out [7] that if there
is an anti-Stokes mode (with frequency ω1a = ω0 + ωm ), then the
effect of parametric instability (PI) will be substantially damped
or even excluded. However in [8–11,13,14] the analysis based on
the models of initial and Advanced LIGO interferometers was presented; it was demonstrated that anti-Stokes modes could not
completely suppress the effect of PI due to the intrinsic asymmetry
of the mode distribution. As a possible “countermeasure” to avoid
the PI it was proposed to change the mirror shape and introduce
low noise damping [12]. A valuable idea to heat test masses to vary
the radii of curvature of mirrors in the interferometer and hence
*
Corresponding author.
E-mail address: strigin@phys.msu.ru (S.E. Strigin).
0375-9601/$ – see front matter © 2008 Elsevier B.V. All rights reserved.
doi:10.1016/j.physleta.2008.06.083
to control values of detuning and the overlap factor between the
optical and elastic modes has been proposed in [15–17]. Now the
problem of introduction of low noise damping into elastic modes
has been intensively investigated [18].
Parametric instability is a serious problem for advanced gravitational wave detectors and we need to know this “enemy” in
detail to avoid it. In particular, we need detailed information about
pairs of Stokes modes and elastic modes which may be possible
candidates for PI. It is known that Stokes modes may be analytically calculated for Gaussian beams (here we do not consider
more “exotic” mesa beams [19,20]). In contrast, elastic modes may
be calculated only numerically. Hence, the accuracy of PI forecast
(and success of methods to prevent it) directly depends on how
accurately we can calculate normal (eigen) frequencies and spatial distributions of elastic modes. In this article we propose to use
known analytical calculated Chree–Lamb elastic modes for perfect
cylinder to estimate an accuracy of numerically calculated modes
frequencies. We also discuss the elastic modes structure and accuracy of numerical calculations for cylinder with flats (model of
LIGO test mass).
2. Calculations of elastic modes
For Advanced LIGO the condition of PI is the following [9]:
Λ1 W ω1
2cLmωm γm
Λ1 ≡ γ+
γ+2 + Δ2
+
γ−
γ−2 + (Δ + δ)2
A0 A∗1 u ⊥ dr⊥ |2
.
u (r )|2 dr
|A0 |2 dr⊥ |A1 |2 dr⊥ |
V|
> 1,
(1)
Here W is the light power circulating in the arms of interferometer (in the main mode), ω1 is the frequency of the Stokes mode,
L is the distance between mirrors in the arms, m is the mirror
LIGO-P080057-P
5728
S.E. Strigin et al. / Physics Letters A 372 (2008) 5727–5731
mass, ωm and γm are the natural frequency and relaxation rate of
elastic modes, γ+ , γ− are relaxation rates of the symmetrical and
anti-symmetrical modes respectively, Δ = ω0 − ω1 − ωm is the detuning, δ is additional detuning of anti-symmetrical mode which
can be introduced by displacement of the signal recycling mirror.
Λ1 is the overlap factor between the main, Stokes optical modes
and elastic mode, A0 , A1 are complex distribution functions over
the cross section of the main and Stokes modes respectively, u ⊥ is
of the elastic mode
the component of the displacement
vector u
normal to the mirror surface, dr⊥ corresponding to the integration over the mirror surface and dr to the integration over the
mirror volume V . Recall that the formula (1) was obtained when
γm γ+ , γ− which is valid for Advanced LIGO.
We see from the condition (1) that to predict PI we need to
know exactly the detuning Δ and overlap factor Λ1 . The frequencies and distribution functions of gaussian optical modes can be
analytically calculated, even if mirrors in the arms have small
differences. For example, they may have slightly different curvature radii which cause optical modes frequency shifts larger than
100 Hz [21,22]. Hence, numerically calculated normal frequency
ωm and displacement vectors u for each elastic mode give the
main contributions to the errors. Requirement for the accuracy of
of elastic mode is modest. Practically, it is
displacement vector u
of several percent—it means
quite enough to have accuracy for u
that the overlap factor may be calculated with the same accuracy
of several percent. The toughest requirement is for the accuracy
ωm of the numerical calculation of elastic modes frequencies: as
it follows from (1) ωm should be small compared with the relaxation rates γ+ or γ− of the Stokes modes:
ωm γ+ , γ− ,
γ+ , γ− 2 s−1 .
(2)
The estimate for the relaxation rates γ+ , γ− is presented for optical modes with low orders (1, . . . , 3) characterizing their distribution over the cross section of the beam (with parameters of
Advanced LIGO listed in Appendix A), for high order mode relaxation rates increased due to diffraction losses [23].
In order to avoid signal recycling effects of high order optical modes generated inside arms cavities it has been proposed to
incorporate the mode matching telescopes in the recycling cavities [24] (it provides additional possibility to control Gouy phase
and transverse mode spacing in each recycling cavity). Therefore,
the range of elastic mode frequencies relating to PI problem may
be estimated from 2π × 4 × 103 s−1 (4 kHz) to approximately
2π × 100 × 103 s−1 (100 kHz).
The key problem of the numerical calculation of elastic mode
frequencies is their relative accuracy. It must be extremely high:
for low elastic frequency about 2π × 10 × 103 s−1 and Δ γ± the
relative accuracy may be estimated as following ωm /ωm 10−5 .
Previous numerical calculations [8] using FEMLAB packet provided insufficient accuracy of several percents. Later accuracy was
improved about 0.1% using an FEM package on a mesh with more
than 60 000 meshing elements [16,17], however, accuracy was still
insufficient.
2.1. Chree–Lamb modes
The accuracy of numerical calculations is usually estimated
comparing difference between frequencies calculated on meshes
with different (increased) number of meshing elements. However,
the best way is to have particular cases when frequency may be
calculated analytically which can be used as beacons. For elastic
modes in cylinders we have such analytical solutions—known from
19th century Chree–Lamb axial symmetric modes [25,26] for cylinders with radius R and height H
u r = − A J 1 (β r ) cos β z,
u z = A J 0 (β r ) sin β z,
u φ = 0,
(3)
β R = ai ,
β H = b j,
ai J 0 (ai ) − J 1 (ai ) = 0,
b j = π + 2π j ,
√
ωm = 2β ct , ct =
E
2ρ (1 + σ )
(4)
(5)
.
Here u r , u z , u φ are components of the displacement vector, A is
a constant, ct is a speed of transverse elastic wave, ρ is density of mirror, E is Young’s module, σ is Poison ratio, J 0 , J 1 are
Bessel functions of order 0 and 1 correspondingly. We see that
Chree–Lamb solutions may be applied only to cylinder with fixed
relations between its radius R and H : R / H = ai /b j . The series of
numerical values ai , b j are the following:
ai 1.84, 5.33, 8.54, 11.71, 14.86, 18.02, 21.16,
24.31, 27.46, . . .
(6)
b j 3.14, 9.42, 15.71, 21.99, 28.27, . . . .
(7)
We can choose the combinations of ai and b j with fractions b j /ai
close to the fraction corresponding to Advanced LIGO test masses
R / H 0.9:
a2
b1
a6
b3
1.70,
1.15,
a4
b2
a7
b3
1.24,
1.35,
a5
b2
a9
b4
1.58,
1.25, . . . .
(8)
For these combinations we have calculated frequencies and distributions of modes both analytically and numerically in order to get
estimates of the numerical calculations error. The relation between
radius and height are slightly different for each case but we will
keep the volume of cylinder to be a constant and equal to volume
of Advanced LIGO test masses fabricated from fused silica.
2.2. Numerical calculations
In order to calculate numerically normal frequencies and distributions of elastic modes we independently used the packages
COMSOL (in Moscow) and ANSYS (in Perth). We have numerically tested frequencies for full 3D analysis and for axial symmetry
(2D problem) when cylinder dimensions R, H relate to Chree–
Lamb modes. We consider the difference ωm between numerically and analytically calculated frequencies as an estimate for the
numerical calculation error. In Fig. 1 we present results for the
frequency range from 2π × 104 s−1 to 2π × 4.5 × 104 s−1 in logarithmic scale if fused silica mirrors have the same volume V as
Advanced LIGO’s 40 kg mirrors.
We can easily see for both in 2D and 3D problems, that the
higher the elastic frequency, the greater the error of the numerical frequency calculations. The curve which corresponds to the
3D problem has been plotted in the frequency range only up to
∼ 2π × 4.5 × 104 s−1 because the high elastic Chree–Lamb mode
distributions are difficult to determine exactly among other elastic
modes due to poor numerical accuracy. It is desirable to increase
the range of calculated frequencies.
We see from Fig. 1 that errors of frequency calculations for
3D case are considerably larger (by about 5 or 6 orders!) than
for the 2D case. Hence, it would be very attractive to transform
the 3D problem into a 2D problem presenting components of displacement vector with known dependence on azimuth angle φ as
following:
u r = u r (r , z)e imφ ,
u z = u z (r , z)e imφ ,
u φ = iu φ (r , z)e imφ . (9)
It would be interesting to solve this very important problem.
It is useful to present these results in terms of relative accuracy ωm /ωm . The calculated Chree–Lamb elastic modes accuracy
LIGO-P080057-P
S.E. Strigin et al. / Physics Letters A 372 (2008) 5727–5731
5729
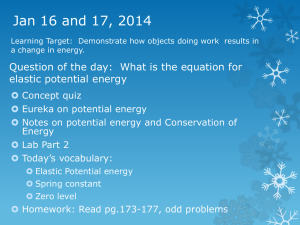
Fig. 3. Test masses of Advanced LIGO have cylindrical shape with radius 17 cm,
height 19 cm and flats shown in figure.
Fig. 1. Dependence of elastic mode frequency error ωm on elastic frequency ωm in
2D and 3D problem for number of meshing elements in the ranges 160 000–200 000
and 37 000–40 000 correspondingly.
Fig. 2. Dependence of elastic mode frequency error ωm on elastic frequency ωm
in 3D problem on different triangle meshes: curve with circle points corresponds
to approximately 8000–10 000 meshing elements, curves with diamond and square
points—to 24 000–27 000 and 37 000–40 000 meshing elements correspondingly.
in the 2D problem varies in the range 10−10 –3 × 10−9 . In the
3D problem the accuracy obtained for ωm /ωm lies in the range
4.4 × 10−6 –10−3 . It is worth recalling that in [8] the relative accuracy of elastic modes numerical calculations (in FEMLAB code)
was about 10−2 whereas in [16,17] (in ANSYS code) accuracy was
better: ωm /ωm 10−3 . The last accuracy is comparable with 3D
calculations with COMSOL code above.
We have also calculated the numerical errors in determination of elastic frequencies for different numbers of meshing elements in the 3D problem. The curve with circle points (see
Fig. 2) corresponds to approximately 8000–10 000 meshing elements, curves with diamond and square points—to 24 000–27 000
and 37 000–40 000 meshing elements correspondingly. The more
accurate curve with square points allows us to determine the error
of numerical calculations in each frequency range. It is worth noting that increasing the number of meshing elements by about 5
times can improve the accuracy of our calculation (error of numerical calculation) approximately by 5–7 times in different frequency
ranges (compare curves with circle and square points in Fig. 2). It
is clear that in the frequency range up to 10 × 104 s−1 the numerical error is less or comparable with relaxation rates γ− , γ+ 2 s−1
of Stokes optical modes.
2.3. Test masses of non-perfect cylindrical shape
The real test mass has small deviations from cylindrical shape:
ears for suspensions, a non-plane (spherical) reflecting surface
with thin interferometric coatings which have elastic constants
which differ from the elastic constants of test mass body. We must
also take into account the influence of these “imperfections”.
For example, all mirrors in Advanced LIGO have non-ideal cylindrical form. They have two symmetrically situated flat regions
(“flats”) on their radial surfaces for attaching ears (see Fig. 3). In
addition the cylinder faces are wedged by a small angle. Obviously,
these changes to the mirror shape will produce a shift of elastic
mode frequencies and, additionally, the splitting of each non-axial
symmetric mode into a doublet. The splitting can be explained
by the fact that flats remove degeneracy with respect to azimuth
angle φ : modes with dependencies ∼ cos mφ and ∼ sin mφ (m is
the azimuth index) must have different frequencies due to different elastic energies of “sine” and “cosine” modes in the regions
near flats. This splitting may increase the possibility of parametric
instability. It is worth underlining that axially symmetric modes
with m = 0 are not split but shifted. Both numerical COMSOL
and ANSYS calculations have been made independently for the
ideal cylinder and for the cylinder with flats by the Moscow and
Perth groups. The cylinder radius and height are equal to 17 cm
and 19 cm and all other parameters for flat regions are available
in [5].
In Table 1 we present some first frequencies of elastic modes
both for the ideal cylinder, for the cylinder with flats and errors
of numerical calculations ωm to each mode. The numerical calculations have been made on triangle mesh with about 40 000
meshing elements. For estimation of the accuracy we used the calculated errors presented in Fig. 2 (curve with square points).
For example, the axisymmetric mode with frequency ∼ 2π ×
10 486 s−1 has a shift of about ω 42 s−1 —it is larger than possible value of optical relaxation rates γ± 2 s−1 . The elastic mode
with m = 1 and frequency ∼2π × 9230 s−1 is split into two modes
(doublet) separated from each other by ω 257 s−1 which is
large value as compared with possible relaxation rate of Stokes
mode. Therefore, each of them should be examined as a separate candidate for parametric instability. It is also well known that
the higher the elastic frequency, the greater the density of elastic
modes and, of course, the possibility of parametric instability.
For preliminary analysis it is useful to have analytical formula
to estimate frequency shifts for mirrors with imperfections (before
doing numerical calculations). We assume that the distribution of
displacements (displacement vector) of a cylinder with and without flats are practically the same. The average kinetic and potential
energies of elastic deformations are equal to each other for mirrors
with and without flats:
LIGO-P080057-P
5730
S.E. Strigin et al. / Physics Letters A 372 (2008) 5727–5731
Table 1
The frequencies ωm of elastic modes with different azimuth numbers for ideal cylinder and cylinder with flats. The errors are taken from Fig. 2 (curve with square
points)
Freq.
ωm of ideal cylinder
Freq.
2π × (8016.07 ± 0.01)
2π × (8016.07 ± 0.01)
2π × (8256.83 ± 0.02)
2π × (8064.98 ± 0.01)
2π × (8064.96 ± 0.01)
2π × (8267.89 ± 0.02)
2π × (8323.75 ± 0.02)
2π × (8267.89 ± 0.02)
2π × (8323.75 ± 0.02)
2π × (9385.92 ± 0.30)
2π × (9128.0 ± 0.3)
2π × (9385.92± 0.30)
2π × (9127.96 ± 0.30)
2π × (10 528.14 ± 0.50)
2π × (10 528.14 ± 0.50)
2π × (12 705.44 ± 1.00)
2π × (12 619.96 ± 1.00)
2π × (12 705.44 ± 1.00)
2π × (12 619.95 ± 1.00)
2π × (8256.84 ± 0.02)
2π × (9230.65 ± 0.30)
2π × (9230.67 ± 0.30)
2π × (10 486.16 ± 0.50)
2π × (10 486.17 ± 0.50)
2π × (12 605.85 ± 1.00)
2π × (12 605.92 ± 1.00)
1
2
ρωm2
u 2i dV =
V
1
2
1
ωm of cylinder with flats
m
Code
0
0
2
2
2
2
1
1
1
1
0
0
3
3
3
3
COMSOL
ANSYS
COMSOL
COMSOL
ANSYS
ANSYS
COMSOL
COMSOL
ANSYS
ANSYS
COMSOL
ANSYS
COMSOL
COMSOL
ANSYS
ANSYS
u i j σi j dV ,
2
V
ρ (ωm + ωm )2
u 2i dV V − V
1
2
(10)
u i j σi j dV ,
(11)
V − V
where ρ is the density of the mirror, ωm and ωm are the elastic frequency of mirrors without flats (perfect cylinder) and shift of
elastic frequency in the case of mirrors with flats, u i are the com , u i j and σi j are the components
ponents of displacement vector u
of strain and stress tensors for perfect cylinder respectively (that
is why we have approximate equality in second equation). All integrals are taken over the cylinder volume V or over the volume
(V − V ) of mirror with flats.
We apply perturbation method using that ωm ωm and
V V and obtain the following estimation:
ωm
ωm
ρωm2
2
V u i dV
2
2ρωm
−
V
V u i j σi j dV
u 2i dV
.
(12)
Note that this formula is valid also for the case when the volume of the non-perfect cylinder is slightly larger—in this case all
integrals over V will change sign.
As an example of candidates for PI we can consider elastic
modes with different azimuth numbers calculated in COMSOL
in 3D. Using COMSOL data we can estimate the frequency shifts
of the doublets for mirrors with flats (see second column of Table 2). In third column of this table we estimate frequency shifts
produced by flats substituting numerical solutions data obtained
for perfect cylinder into formula (12). We can see that formula (12)
gives approximate agreement with COMSOL data and can be very
useful in frequency shift estimations for elastic modes in the case
of cylinders with flats.
It is worth noting that these shifts are greater than the relaxation rates of symmetric and anti-symmetric optical modes
γ+ , γ− 2 s−1 so that each doublet can contribute to the parametric instability separately.
3. Conclusion
Using analytical solutions for Chree–Lamb elastic modes as a
beacons we can effectively estimate numerical calculation error of
elastic modes.
The calculation of elastic modes frequencies with accuracy less
than relaxation rates γ± of Stokes mode is very important for Advanced LIGO because it allows the most dangerous candidates for
Table 2
Shifts of elastic modes frequencies estimations ωm for the cylinder with flats using COMSOL code and formula (12)
Freq.
ωm of ideal cylinder
2π × (8016.07 ± 0.01)
2π × (9230.65 ± 0.30)
2π × (8256.83 ± 0.02)
2π × (12 605.85 ± 1.00)
ωm using COMSOL
ωm using formula (12)
m
2π × 49.0
2π × 155.3
−2π × 102.7
2π × 11.0
2π × 66.9
2π × 13.1
2π × 99.1
2π × 47.7
2π × 145.2
−2π × 67.2
2π × 11.5
2π × 68.9
2π × 22.6
2π × 103.2
0
1
1
2
2
3
3
PI to be identified. This can allow methods to prevent PI to first
be analyzed analytically thereby reducing the risk of having to find
adhoc experimental solutions after interferometers come into operation. Thus accurate analysis can allow the development of a
“cure” against PI more effectively. Note that the relaxation rate of
Stokes modes is not a fixed value but it increases with the order of the optical mode (due to diffraction losses) and we should
compare the relaxation rates γ+ , γ− and error of numerical calculations ωm for each pair of PI candidates.
The numerical calculations using 3D module of COMSOL
demonstrate considerably larger error than calculations with the
2D module. It is very attractive to transform 3D problem into
2D problem by introducing dependence of all displacement vector components on azimuth angle φ as ∼ e imφ . This program is in
progress now.
Imperfections from the cylinder shape (such as flats and suspension ears), should cause splitting of elastic modes with azimuth
index m 1 into doublets and the difference between doublet
frequencies may be large enough or greater as compared with
relaxation rate of Stokes mode. The appearance of doublets may
increase the possibility of PI.
Using the numerically calculated distributions of elastic modes
for the perfect cylinder we can effectively estimate frequency shift
of elastic modes in test masses with small imperfections using a
perturbation method.
It is also worth noting that numerical calculation of elastic
modes cannot solve completely the problem of parametric instability because of inhomogeneities of fused silica density, Young’s
modulus uncertainty, suspension “ears” and some small implementation differences of each test mass. This may provide an
uncontrollable shift of elastic mode frequencies [8] on the level
ωm /ωm 10−3 .
We emphasize that the most reliable method to avoid the
parametric instability requires experimentally measured eigenfrequency values, mode shapes and quality factors of elastic modes
for each mirror and comparison with numerical results. Perhaps,
the most “dangerous” modes (candidates for parametric instability)
can be removed, for example, by accurate small change of mirror shape or by introducing low noise damping. The last stage of
the research requires direct tests of the optical field behavior with
smooth increase of the input optical power. This will allow the
study of parametric instability precursors.
Acknowledgements
We are grateful to Vladimir Braginsky, Ilya Polyakov, Peter
Fritschel and especially to Michael Gorodetsky for fruitful and
stimulating discussions. This work was supported by LIGO team
from Caltech and in part by NSF and Caltech grant PHY-0353775,
by the Russian Agency of Industry and Science (contracts No.
5178.2006.2 and 02.445.11.7423), by grant of President of Russian
Federation No. MK-195.2007.2, by grant of Moscow State University
in 2008 and by grant of rector of Moscow State University, 2008.
Work in Perth was supported by the Australian Research Council
LIGO-P080057-P
S.E. Strigin et al. / Physics Letters A 372 (2008) 5727–5731
and the Western Australian Government Centres of Excellence Program. We thank Pablo Barriga, Ju Li and Chunnong Zhao for useful
discussions.
Appendix A. Numerical parameters
For the interferometer we use parameters planned for Advanced
LIGO:
ω0 = 2 × 1015 s−1 ,
W = 830 kW,
w 0 = 6 cm,
L = 4 × 10 cm,
R = 17 cm,
H = 19 cm,
−3
T = 5 × 10
γ+ =
(A.1)
5
T pr T c
T pr = 6 × 10
1.5 s−1 ,
16L
(A.3)
−2
,
(A.2)
,
−2
T sr = 7 × 10
γ− = 1.6 . . . 103 s−1 .
,
(A.4)
(A.5)
Here W is the power circulating inside each arm of LIGO interferometer, ω0 is mean light frequency, w 0 is radius of beam spot
on mirror, L is distance between mirrors, R is radius and H is
height of test mass (input and end mirrors in the arms), T is transparency of input mirror of FP cavity in the arm, T pr and T sr are
transparencies of PR and SR mirrors correspondingly. We assume
that cylindrical mirror is fabricated from fused silica with angle of
structural losses φ = 1.2 × 10−8 :
ρ = 2203 kg/m3 ,
m = 40 kg,
E = 7.31 × 1010 Pa,
−8
φ = 1.2 × 10
,
σ = 0.17,
(A.6)
γm = ωm φ/2.
(A.7)
Here E is Young’s module,
σ is Poison ratio.
References
[1] A. Abramovici, et al., Science 256 (1992) 325.
5731
[2] A. Abramovici, et al., Phys. Lett. A 218 (1996) 157.
[3] LIGO technical document G060052-00-E, current sensitivity curves are available in http://www.ligo.caltech.edu/~lazz/distribution/LSC_Data/.
[4] Advanced LIGO System Design (LIGO-T010075-00-D), Advanced LIGO System
requirements (LIGO-G010242-00), available in http://www.ligo.caltech.edu.
[5] http://www.ligo.caltech.edu/~ligo2/scripts/12refdes.htm.
[6] V.B. Braginsky, S.E. Strigin, S.P. Vyatchanin, Phys. Lett. A 287 (2001) 331, gr-qc/
0107079.
[7] E. D’Ambrosio, W. Kells, Phys. Lett. A 299 (2002) 326;
LIGO-T020008-00-D, available in http://www.ligo.caltech.edu.
[8] V.B. Braginsky, S.E. Strigin, S.P. Vyatchanin, Phys. Lett. A 305 (2002) 111.
[9] A.G. Gurkovsky, S.E. Strigin, S.P. Vyatchanin, Phys. Lett. A 362 (2007) 91, gr-qc/
0608007.
[10] S.E. Strigin, S.P. Vyatchanin, Phys. Lett. A 365 (2007) 10.
[11] S.E. Strigin, S.P. Vyatchanin, Quantum Electron. 37 (12) (2007) 1097.
[12] V.B. Braginsky, S.P. Vyatchanin, Phys. Lett. A 293 (2002) 228.
[13] H.S. Bantilan, W.P. Kells, LIGO document T-060159, available in http://www.
ligo.caltech.edu/docs/T/T060159-00/.
[14] W.P. Kells, LIGO document T-060207, available in http://www.ligo.caltech.edu/
docs/T/T060207-00/.
[15] C. Zhao, L. Ju, J. Degallaix, S. Gras, D.G. Blair, Phys. Rev. Lett. 94 (2005) 121102.
[16] L. Ju, S. Gras, C. Zhao, J. Degallaix, D.G. Blair, Phys. Lett. A 354 (2006) 360.
[17] L. Ju, C. Zhao, S. Gras, J. Degallaix, D.G. Blair, J. Munch, D.H. Reitze, Phys. Lett.
A 355 (2006) 419.
[18] S.W. Schediwy, C. Zhao, L. Ju, D.G. Blair, P. Willems, Phys. Rev. Lett., submitted for publication, available in http://admdbsrv.ligo.caltech.edu/lsc_papers/
default_reviewed.htf.
[19] E. D’Ambrosio, R. O’Shaughnessy, S.E. Strigin, K. Thorne, S.P. Vyatchanin, gr-qc/
0409075.
[20] R. O’Shaughnessy, S.E. Strigin, S.P. Vyatchanin, gr-qc/0409050.
[21] W.P. Kells, LIGO document T060159-00-D, available in http://www.ligo.caltech.
edu.
[22] W.P. Kells, LIGO document G050578-00-I, available in http://www.ligo.
caltech.edu.
[23] P. Barriga, B. Bhawal, L. Ju, D.G. Blair, J. Opt. Soc. Am. A 24 (6) (2007) 1731.
[24] LIGO technical document LIGO-G070691-00-D, available in http://www.ligo.
caltech.edu.
[25] C. Chree, Quart. J. Pure Appl. Math. 21 (83/84) (1886) 287.
[26] H. Lamb, Proc. R. Soc. London A 93 (648) (1917) 114.