Nonlinear Control System Design using a Gain Scheduling
advertisement

i
Nonlinear C o n t r o l S y s t e m D e s i g n
u s i n g a Gain S c h e d u l i n g Technique
A Thesis Presented t o
The F a c u l t y o f t h e College o f Engineering and Technology
Ohio U n i v e r s i t y
In Partial Fulfillment
o f t h e R e q u i r e m e n t s f o r t h e Degree
Master o f Science
by
Metin Songchai kul)
,/
March, 1993
iii
Table of contents
Page
Acknowledgements.....
...........................................................................
iv
Abstract ............
.
.
..................................................................................... v
Chapter 1
Introduction.........................................................................
1
Chapter 2 Theory.......................................................................................
3
2.1 Basics of Lyapunov S t a b i l i t y Theory ............................3
.....................13
2 . 2 Linear Controller Design ...,...........
.
.
.
......................................
2 . 3 Gain Scheduling..................
.
.
.
29
..
Chapter 3 Missile Flight Control Problem.............
.
32
3 . 1 Mathematical Description of M i s s i l e Mode1...........3 3
3 . 2 Design Objectives ............................................................
36
Chapter 4
Design Steps...................................................................
38
4.1 Equilibrium Point Selection ..........................................
38
4 . 2 Linearization around each E q u i l i b r i u m Point .........41
4.3 Linear Controller Designs..............................................
43
4.4 Scheduling the Set o f Linear C o n t r o l l e r s ................60
Chapter 5
Summary and Conclusions ................................
References. ...........
......
Appendix A
77
...........................................................................
79
Computer programs..................................................
A1
Acknow ledaement
1 w i s h e s t o express sincere appreciation t o my advisor Dr.
Douglas Lawrence, f o r h i s support and guidance throughout the
course of t h i s study, w i t h o u t w h i c h the completion o f t h i s t h e s i s
would n o t have been possible.
A p p r e c i a t i o n i s extended t o the member o f t h e examination
c o m m i t t e e f o r s a c r i f i c i n g t h e i r free time, and g i v i n g t h e i r valuable
c r i t i c i s m s : Dr. Aysin Yeltekin , Dr. Dennis I r w i n and Dr. Brain Fabien.
Special appreciation i s extended t o my f a m i l y : Pramot, Arunee
and Nutharin Songchaikul, f o r t h e i r encouragement and support which
I have been able t o depend on.
Also, thanks t o Srikasem's f a m i l y who a l w a y s help and care
throughout the years of m y academic i n Ohio University.
F i n a l l y , deepest thanks t o my special f r i e n d Nuthaya f o r her
help i n typing.
Abstract
Real i s t i c models o f engineering s y s t e m s of t e n are nonlinear.
As a consequence, t h e dynamical b e h a v i o r o f a s y s t e m t o be
c o n t r o l l e d changes w i t h the operating region.
I n recent years, one
design methodology t o c o n t r o l t h i s e f f e c t , c a l l e d Gain Scheduling,
has proven t o be successful. The basic idea o f gain scheduling i s t o
break the c o n t r o l design process i n t o t w o steps. The f i r s t step i s t o
l i n e a r i z e the model about one or more operating p o i n t s . Then l i n e a r
design methods are applied t o the linearized model a t each operating
p o i n t i n order t o o b t a i n t h e s t a b i l i z e d s y s t e m w i t h i n t h e design
objectives. The f i n a l step, the actual gain scheduling, i s obtained by
scheduling o r i n t e r p o l a t i n g the gains of t h e l o c a l operating p o i n t s
designs i n o r d e r t o handle t h e n o n l i n e a r a s p e c t s o f t h e design
problem.
I n t h i s thesis, a nonlinear c o n t r o l l e r w i l l be designed using a
gain scheduling technique f o r a h y p o t h e t i c a l m i s s i l e model.
The
m i s s i l e considered here i s the same as discussed i n recent papers on
g a i n scheduling.
Here, a nonlinear a u t o p i l o t i s designed u s i n g
c l a s s i c a l servomechanism theory and s t a t e f e e d b a c k k t a t e observer
based techniques.
C h a ~ t e r1
Introduction
I t i s a w e l l - k n o w n f a c t t h a t a r e a l i s t i c s y s t e m model f o r
engineering applications i s nonlinear.
dynamical behavior of
As a consequence, t h e
a system t o be c o n t r o l l e d changes w i t h the
operating region. One design method t o handle t h i s e f f e c t i s called "
Gain Scheduling " .
Recently, several papers have described studies
of gain scheduling i n c o n t r o l s y s t e m design both i n l i n e a r s y s t e m
aspects and nonlinear s y s t e m aspects, and of those studies, many
have focused on the application of gain scheduling i n f l i g h t c o n t r o l
problems as published i n [5], [9], [ I 01, [ I 11, [ I 21, and [ 131. These
s t u d i e s have demonstrated t h a t gain scheduling can be a successful
design methodology f o r many applications o f engineering. The design
process f o r gain scheduling involves 2 basic steps.
1 . The s y s t e m t o be c o n t r o l l e d i s l i n e a r i z e d a t s e v e r a l
e q u i l i b r i u m p o i n t s (The equi 1 i b r i u m p o i n t s should be s e l e c t e d t o
cover the desired operating range). Then, f o r each 1 inearized plant, a
l i n e a r t i m e - i n v a r i a n t design technique i s applied t o c r e a t e a l o c a l
c o n t r o l l e r w h i c h s a t i s f i e s t h e design o b j e c t i v e s
f o r the system
when operating s u f f i c i e n t l y close t o the given e q u i l i b r i u m p o i n t .
2. The a c t u a l gain scheduling i s obtained by " s c h e d u l i n g " or
2
i n t e r p o l a t i n g the gains of the c o n t r o l l e r s i n step 1 between the
equilibrium points. In this way, a nonlinear controller f o r a nonlinear
system w i l l be obtained.
Despite i t s popularity, the gain scheduling method s t i l l has
some r e s t r i c t i o n s . For example, the operating condition i s normally
specified by the value of one or more exogenous variables and the
scheduled gain depends on the instantaneous values o f these
variables.
The studies described in [ I 31 show t h a t current gain
scheduling i s necessarily l i m i t e d t o s l o w v a r i a t i o n s i n t h e
scheduling variables. Previously, t h i s l i m i t a t i o n was j u s t i f i e d only
through implementation and simulation, but [ l 11, [13], and a recent
paper 151 shows a mathematical formula to j u s t i f y t h i s r e s t r i c t i o n .
In t h i s thesis, the author w i l l use the gain scheduling
technique t o design a nonlinear controller f o r a hypothetical m i s s i l e
model, The m i s s i l e considered here i s the same as discussed i n [9101, but, instead of using an H-infinity controller as done i n 191, the
author w i l l employ type- 1 servo system as the controller.
Chapter 2 explains the theory that w i l l be used throughout this
thesis. Chapter 3 describes the m i s s i l e model. The design process
and simulation r e s u l t s w i l l be discussed i n Chapter 4. Chapter 5
w i l l set f o r t h the conclusions of t h i s design work.
C h a ~ t e r2
Theory
In t h i s chapter the theory that related to t h i s thesis w i l l be
reviewed. First, the basics of the Lyapunov s t a b i l i t y theory w i l l be
given. The detail i n this section w i l l include the theory of nonlinear
system, equilibrium point, s t a b i l i t y i n the sense of Lyapunov and
linearization. Next, the theory of linear control design, type- 1 servo
system w i l l be described. Last, the technique f o r gain scheduling
w i 1 1 be considered.
2.1 Basics of Lva~unovS t a b i l i t v Theory
For a given control system, the f i r s t and most important
aspect t o be determined i s i t s s t a b i l i t y . A system i s described as
stable i f when we s t a r t the system somewhere around a desired
operating point, the system w i l l operate around t h i s point f o r all
future time.
I f the system i s linear and t i m e - i n v a r i a n t , many
c r i t e r i a are available f o r determining s t a b i l i t y such as the Nyquist
S t a b i l i t y C r i t e r i a and Routh's S t a b i l i t y Criteria.
nonlinear, or time-varying,
I f the system i s
one cannot apply these c r i t e r i a ,
The
most useful theory f o r determining the s t a b i l i t y of a nonlinear
4
and/or time-varying system i s Lyapunov S t a b i l i t y Theory.
Lyapunov's work, The General Problem o f Plot ion Stability.,
together w i t h t w o methods f o r s t a b i l i t y analysis (the linearization
method and the direct method) was published i n 1892 by the Russian
mathematician Alex Mi khai louich Lyapunov. However, t h i s theory did
not r e c e i v e much a t t e n t i o n u n t i l the e a r l y
1 9 6 0 ' s when the
p u b l i c a t i o n of the work of Lure's and a book by La Salle and
Lefschetz brought Lyapunov's work t o the f o r e f r o n t o f the control
engineering community. Today, Lyapunov's 1 inearizat ion method has
come t o represent the theoretical j u s t i f icatiorl of linear control,
w h i l e Lyapunov's direct method has become the most important tool
for nonlinear system analysis and design [ 141.
The Theory of Lyapunov also plays an important r o l e i n the
design o f a controller f o r a nonlinear system.
I n order t o provide
foundational information regarding Lyapunov Theory, the f o l l o w i n g
terms are defined and explained:
- Nonlinear System
A nonlinear dynamic system can be represented by a s e t of
nonlinear d i f f e r e n t i a l equation of the form
x
=
f(x,u,t)
where
X- 1 i.
,m
U =
Y1
,p x 1 output or measurement vector
...
- YP
1 input or control vector
-
Y2
Y=
,n x 1 state vector
-
I n the case where the system does not e x p l i c i t l y contain
control input variables, the system i s described by the f o l l o w i n g
equation.
x = f(x,t)
The number of states n i s called the order of the system. A
s o l u t i o n x ( t ) of Equation (2.1-2) i s r e f e r r e d t o as the system
t r a j e c t o r y i n the state space for t 2 0
- Equilibrium Point
Definition:
A
state x u
i s an e q u i l i b r i u m s t a t e ( o r
~ q u i l i b r i u mp o i n t ) o f the system i f once x ( t l is equal t o x u , i t
remains equal t o xu for a i l future time.
Mathematically, t h i s d e f i n i t i o n means t h a t an e q u i l i b r i u m
point of the system i s a t r i p l e (xo,uo,yo of a constant state, input
and output such that
f(~g,uo,t)" 0
Many s t a b i l i t y problems are n a t u r a l l y f o r m u l a t e d w i t h
respected to equilibrium points.
- S t a b i l i t y i n the sense of Lyapunov
Definition:
stable i f , f o r any
then /' x f t l
The Equilibrium s t a t e
xo
=
0 i s said to be
R>U, there exist r>U,, such that i f I/ x(UI //< r,
I/< R f o r a l l t>U. Otherwise, the equilibrium point i s
8
system t r a j e c t o r i e s , which s t a r t closely t o the equi l i brium point,
actually converge t o the equilibrium point as t i m e goes t o i n f i n i t y .
Also, i t i s necessary t o know how f a s t the system trajectories w i l l
converge t o the equilibrium point. The following definitions address
these concepts.
Definition: An equilibrium point xu
=
U i s as,ymptotical/y
stable i f i t i s stable,, and i f in addition there ~ . x i s t ssome r > 0
such that
If x(UI If < r implies that x(tl
Definition: .An equilibrium point
7'
U as
xu
=
t
7
'
a,.
0 i s e.xponential1,~
stable i f there exist two s t r i c t l y positive numbers
a and A such
that
V t > 0 , 11 x(t) 11 I a Ilx(0) lle-At
for a1 1 x(Ul in some ha l l Br around the origin.
These s t a b i l i t y definitions are formulated to characterize the
l o c a l behavior of systems when the system operates near an
equilibrium point. Local properties do not describe the behavior of
the system when the i n i t i a l state i s some distance away f r o m the
equil ibrium point. The following d e f i n i t i o n describes a concept o f
s t a b i l i t y i n t h i s case.
Definition:
I f asymptotic (or e.xponential) s t a b i l i t y holds
f o r any i n i t i a l state,, the equilibrium point
i s said t o be
asymptotically (or e.xponentially) stable in the large.
I t is also
called globally asymptotically (or e.xponentiall,~)stable.
-
Linearization
The l a s t s t a b i l i t y theorem that w i l l be given i s the important
theorem f o r t h i s gain scheduling technique. This theorem give the
idea o f the s t a b i l i t y f o r nonlinear systems w i t h s l o w l y varying
inputs. I t i s used t o guarantee nonlocal performance of the nonlinear
system. The t3eorem and the details of the proof are discussed i n
[S]. Here, the theorem i n [51 w i l l be given again as;
For the system described as
~ ( t =) f(x(t), u(t)) , x(b) =xo , t 2 to
assume
( H I ) f: R* x
~ m - +
i s t w i c e continuously differentiable
(H2) there i s bounded, open set
r c R~
and a continuously
10
d i f f e r e n t i a b l e f u n c t i o n x:;input value u
E
R" such t h a t f o r each constant
r, ~(x(u),U) =O,
(H3) t h e r e i s a A
> Osuch t h a t
f o r each u E
r, t h e
eigenvalues
have r e a l p a r t s no greater than -A.
of (~V~X)(X(U),U)
Theorem: Suppose t h e s y s t e m ( 1 . 1 ) s a t i s f i e s ( t i 1 ), (H2), and ( H 3 ) .
Then t h e r e i s a p* > o such t h a t given any p
E
(0, p*] and T > 0 , there
e x i s t 6,(p), B2(p, T)> 0 f o r w h i c h t h e f o l l o w i n g p r o p e r t y holds.
continuously d i f f e r e n t i a b l e input u ( t ) s a t i s f i e s
~ ( t E)
If a
11 xo - x(u(to)) 11 <a1 f o r
r, t 2 to and
then t h e corresponding s o l u t i o n o f t h e s y s t e m given above s a t i s f i e s
II x(t>- x(u(t)) II < P ,
t
2 to.
Now t h e l i n e a r i z a t i o n method w i 1 1 be discussed.
linearization method
Lyapunov's
i s concerned w i t h t h e l o c a l s t a b i l i t y o f a
11
nonlinear system. The idea of t h i s approach comes from the w e l l known f a c t that a nonlinear system, when operated i n a s u f f i c i e n t l y
small neighborhood of an equilibrium point, may behave much l i k e a
linear system. This method involves linearizing the given system in
the neighborhood of an e q u i l i b r i u m point and d e t e r m i n i n g the
behavior of the nonlinear system's t r a j e c t o r i e s by studying t h i s
1 inearized system using 1 inear system techniques.
Mathematically, the idea i s to expand the nonlinear functions
i n t o a Taylor series around the equilibrium point and r e t a i n only the
linear term, neglecting the higher-order terms provided they are
small compared to the linear term. Consider the nonlinear dynamics
system described below;
Recall an e q u i l i b r i u m p o i n t of the s y s t e m i s a t r i p l e
( x ~ ~ ou1 of~ constant
~ Y
state, input, and output such that
f(xo,uo,t) = 0
for all t 2 to
Define Jacobian matrices
By Taylor Series Expansion of f and g, the functions f and g
can be expanded around the equilibrium state and input (xo,uo)
as
f ( x , ~ , t=) f(x0,u0,t) + A(x0,uO,t)(x - xo)+ B(xO,uO,t)(u - uo) + hot's
(2.1-6)
g(x,u,t) = g(q,uo,t) + C(xo,uO,t)(X - xo)+ D(%,u0,t) (U - uo) + hot's
(2.1-7)
where hot's means higher-order terms
Assuming that the higher-order terms are s m a l l enough t o be
neglected one can approximate these functions as
f(x,u,t) = A(xg,uo,t) (x - xo)+ B(xo,~o,t)(u - uo)
then define deviation variables
x6 = x - xo
u6 = u - uo
Ya = Y - Yo,
Since x ( t ) i s a constant v e c t o r
Using the linear approximation of f and g around e q u i l i b r i u m
s t a t e and i n p u t one can t h e n d e s c r i b e a l i n e a r s y s t e m t h a t
approximates the behavior of the nonlinear system (2.1-3) near the
e q u i l i b r i u m p o i n t as
y6(t) = C(xo,uO,t)xa(t) + D(xo,uo,t>uij(t)
(2.1-8)
Based on the l i n e a r i z e d s y s t e m (2.1-8>, one can apply l i n e a r
design techniques t o guarantee the s t a b i l i t y of tP~iss y s t e m .
2.2 Linear Controller Desian
The design o f the c o n t r o l l e r , w h i c h regulates the given m i s s i l e
i n t h i s t h e s i s problem, employs a type- l servo s y s t e m based on the
pole placement approach and s t a t e observers . Theorems r e l a t e d t o
t h i s d e s i g n i n c l u d e p o l e p l a c e m e n t d e s i g n and t h e d e s i g n o f
observers.
-
Pole Placement
Consider SISO system
x=Ax+Bu
where
x = s t a t e vector (n
x
1 vector)
Y = output signal (scalar)
u
=
control signal ( s c a l a r )
A
=
n x n constant m a t r i x
B = n x 1 constant m a t r i x
C
=
1
x n constant m a t r i x
The c o n t r o l signal w i l l be
us-Kx.
The 1 x n vector K i s called the s t a t e feedback gain v e c t o r .
S u b s t i t u t i n g Equation (2.2-3) i n t o Equation (2.2-1 ), w e obtain
The s o l u t i o n o f Equation (2.2-4)
i s given by
The s t a b i l i t y of t h i s system i s determined by the eigenvalues
of the m a t r i x (A-BK).
By choosing a proper K, one can construct the
m a t r i x (A-BK) such that i t i s asymptotically stable. This problem
of placing the closed-loop poles a t the desired location i s called the
pole placement problem. The technique used t o solve t h i s problem
c o n s t r u c t s an a s y m p t o t i c a l l y s t a b l e closed-loop
s y s t e m by
specifying the desired locat ions f o r the closed-.loop poles.
By
assuming the control law t o be u = -Kx, one can determine the
feedback gain vector K such that the closed-loop system as shown i n
FIGURE 2.2- 1 w ill have a desired characteristic equation.
FIGURE 2.2-1 Block diagram w i t h u = -Kx
16
When using t h i s technique, one must meet the necessary and
sufficient
condition that
controllable.
the
system state
i s completely
Algebraically, t h i s i s equivalent t o nonsingularity of
C ( A P B ) = [ B A B . - - A " - ~ B ]Note,
all
t h e n x n controllability matrix
s t a t e v a r i a b l e s are assumed t o be available and measurable f o r
feedback.
D e t a i l e d i n f o r m a t i o n c o n c e r n i n g t h i s technique i s
explained i n [61.
feedback
An approach f o r the d e t e r m i n a t i o n o f the s t a t e
K p r e s e n t e d n e x t w a s developed by
gain m a t r i x
J.E.Ackermann. This approach i s known as Ackermann's formula.
Ackermann's formula
The s t a t e equation f o r t h i s system i s given by
x=Ax+Bu.
Assume that the system i s completely s t a t e controllable
.
Ackermann's formula i s given as
K = [0 0 ... 0 11 [B f AB
f A*B f . . . i
B]-'a(~)
and
a (s) = ( s - ~ i()s - ~ 2 ). . . ( s - c I ~ )
=
sn+ a 1 s n - l + . . . +a,.ls
where p 1 .p2, ... .pn
=
+ an
the desired closed-loop poles.
(2.2-6)
-
Design of S t a t e Observers
I n the pole placement approach, one assumes t h a t a l l s t a t e
variables are available f o r feedback.
For a fir-st o r second order
s y s t e m , f u l l s t a t e feedback i s not an unreasonable e x p e c t a t i o n .
However, f o r most high order systems, a l l s t a t e v a r i a b l e s are n o t
available f o r feedback; t o implement pole-placement design i n these
s y s t e m s , i t i s necessary t o e s t i m a t e these u n a v a i l a b l e s t a t e
v a r i a b l e s f r o m the measurements t h a t can be made on the system.
The method used t o e s t i m a t e the unavailable s t a t e s i s commonly
c a l l e d a s t a t e observer
A s t a t e observer e s t i m a t e s t h e s t a t e
v a r i a b l e s based on the measurements o f the o u t p u t and c o n t r o l
variables w i t h a r b i t r a r i l y specified e r r o r dynamics, b u t can only do
so on the condition that the system i s completely observable. Also,
[6]has provided proof of t h i s f a c t
A f u l l - o r d e r s t a t e observer i s one t h a t e s t i m a t e s a l l s t a t e s
v a r i a b l e s o f t h e s y s t e m regardless o f w h e t h e r o r n o t they are
d i r e c t l y measurable. A minimum-order s t a t e observer i s defined as
an observer t h a t e s t i m a t e s only t h e m i n i m u m number of s t a t e
variables.
T h i s thesis w i l l only consider the f u l l order s t a t e observer
t
Use ? t o designate the observed s t a t e vector f o r
Assume that state x i s t o be approximated by the state ? of
the dynamic model as show i n FIGURE 2.2-2
X
+
b
B
q=>
+
1/s
2
Y
C
+
U
A
-
2
+
+
B X,
,
u +
-
-
-X
l/s :
>u
A ,
L
3
C
-
4
+
4
FIGURE 2.2-2 Block diagram o f system w i t h full-order s t a t e observer
From FI GURE (2.2-2),
;=A?+BU+L(~-G)
(2.2-9)
which represents the state observer w i t h y and u as input and
-x as output.
19
To obtain the observer e r r o r equation, s u b t r a c t Equation ( 2 . 2 9) f r o m Equation ( 2 . 2 - 7 )
x - 2 = Ax+Bu - Ax?-Bu-L(Cx-Cs = (A-LC) (x -
x)
(2.2- 10)
Define the d i f f e r e n c e between x and ii as t h e e r r o r v e c t o r or
e = X-ii and Equation (2.2- 10) becomes
e = (A-LC) e .
(2.2- 1 1)
T h i s i l l u s t r a t e s t h a t t h e eigenvalues of t h e m a t r i x A - L C
determine the dynamic behavior of the e r r o r v e c t o r .
I f t h e eigenvalues of m a t r i x A-LC are chosen i n such a way
that the error system 2 2 - I
i s exponentially stable w i t h
acceptable r a t e o f decay, then any e r r o r v e c t o r w i l l tend t o zero
w i t h adequate speed.
Since the problem o f designing a f u l l - o r d e r observer requires
t h a t the observer gain m a t r i x L be such t h a t A-LC
has desired
eigenvalues, t h i s problem resembles t h e pole placement problem.
Thus, using the Principle of Duality, l e t
z = A*Z + C*V
and assume the control signal y t o be
v
=
-L*z
(2.2- 12)
20
L e t I J ~ . I J ~ . .Pn
be t h e d e s i r e d eigenvalues o f t h e s t a t e
observer m a t r i x , and assume the dual s y s t e m i s completely s t a t e
c o n t r o l lable.
Furthermore, t a k i n g the same
p i ' s as the desired
eigenvalues o f the s t a t e feedback gain m a t r i x , one can w r i t e :
Is1 - (A* - C8L*)I= (s - pl)(s- pZ)...(s - p,)
Since (A*-c
*L*1 has
the same eigenvalues as
can determine the observer gain
(A-LC),
L by f i r s t d e t e r m i n i n g L*
one
i n the
pole placement approach
Ackermann's
Formula
Consider Equation (2.2- 12) and Equation (2.2- 13)
The Ackermann Formula f o r pole placement can be w r i t t e n as
L* = [O 0 ... 0 11 [C*
A'C*
I ...
(A*)"-~c*]"a(A)
Taking transposes, one w i l l obtain Ackermann's Formula f o r
the s t a t e observer gain as
and
where
P ~ . P ...
~ ..Pn = the desired eigenvalues of observer e r r o r
dynamics.
I n t h e pole placement design process, w e assumed t h a t the
actual s t a t e x ( t ) was available f o r feedback; however, the actual
s t a t e x ( t ) may not be measurable. Therefore, w e need t o design an
observer and use the observed s t a t e
G(t)
f o r feedback.
Thus, t h e
design step involves a two-stages, f i r s t determine the feedback gain
m a t r i x K t o y i e l d the desired closed-loop c h a r a c t e r i s t i c equation
assuming s t a t e feedback and second d e t e r m i n e t h e observer gain
m a t r i x L t o y i e l d the desired observer c h a r a c t e r i s t i c equation. The
e f f e c t o f using
g(t) instead
of the actual s t a t e x(t) on t h e closed-
loop control system i s discussed i n [ 6 ] . Thus, only the conclusion o f
t h i s e f f e c t w i l l be mentioned.
22
Since the characteristic equation that described the dynamics
of the observed-state feedback control system i s given as
I sI-A+BK I 1 sI-A+LCI
=0
Obviously, i t shows that the closed-loop poles of the combined
observer-state feedback system comprise the poles due t o the pole
placement design together w i t h the poles due t o the observer design.
This means that the pole placement design and the observer design
can be done separately and combined together t o f o r m the observerstate feedback control system.
-
Servo s y s t e m
FIGURE 2.2-3 Block diagram of Type-1 servp system
In the discussion of pole placement and the design of a state
observer, only a closed-loop system w h i c h has no input was
considered. The purpose of such a design I s t o r e t u r n a l l s t a t e
variables from t h e i r i n i t i a l values t o values of zero when the states
23
have been perturbed. Such a system i s called a regulator. However,
many c o n t r o l s y s t e m s , i n c l u d i n g the c o n t r o l s y s t e m discussed i n
t h i s thesis, require the system output t o t r a c k an external reference
input.
I n such cases, t h i s n e c e s s i t a t e s m o d i f y i n g t h e design
equation of t h e pole placement and the s t a t e observer. These types
o f s y s t e m s a r e known as servo s y s t e m s
and a r e i l l u s t r a t e d i n
FI GURE 2.2-3.
Servo system design involves c o n s t r u c t i n g compensators and
feedback l a w s t h a t y i e l d a stable (BIB0 and / o r a s y m p t o t i c ) closedloop system able t o t r a c k a specified class of reference signals. In
FIGURE 2.2-3, the i n t e g r a t o r , together w i t h s t a t e feedback scheme,
i s used t o
s t a b i l i z e the s y s t e m and a s y m p t o t i c a l l y t r a c k s t e p
reference inputs w i t h zero steady-state e r r o r .
Since the given p l a n t ( m i s s i l e problem) does n o t i n v o l v e an
integrator, t h i s thesis w i l l consider only the design theory o f a type
1 servo s y s t e m w h e r e t h e p l a n t has no i n t e g r a t o r .
As mentioned
e a r l i e r , i n m o s t cases, n o t a l l s t a t e v a r i a b l e s can be d i r e c t l y
measured, theref ore t h i s consideration of servo s y s t e m design w i l l
also include a discussion o f the s t a t e observer.
A type- 1 servo
s y s t e m where the plant has no i n t e g r a t o r i s shown i n FIGURE 2.2-4.
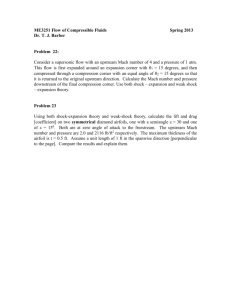
FIGURE 2.2-4 Block dlagram o f type- 1 servo s y s t e m w i t h s t a t e observer
F r o m t h i s figure, w e have
x(t) = Ax(t) + Bu(t)
The c o n t r o l l a w i s described as
where
u(t)
=
control signal ( s c a l a r )
y(t)
=
plant output signal (scalar)
r(t)= reference input signal
c(t)
=
output of i n t e g r a t o r ( s t a t e variable o f t h e system)
I t w i l l be assumed t h a t :
1 . The plant i s controllable and observable
2. The plant has no pole a t s=O
3. The plant has no zero a t s=O
Assume t h a t the r e f e r e n c e i n p u t ( r ( t ) = s t e p f u n c t i o n ) i s
applied a t t
=
0 . As a consequence of the e f f e c t of t h e a d d i t i o n of
the observer on a closed-loop system, the pole placement design and
the observer design can be design separately and combined together
t o f o r m the observer-state feedback system. Thus, f r o m FIGURE 2.24, w e w i l l use the pole placement approach t o design gain K and K i
t o s t a b i l i z e the system. Then the observer design f o r gain L w i l l be
app 1 ied.
Assuming the actual s t a t e s x ( t ) are a v a i l a b l e f o r feedback,
one can f o r m t h e dynamic equation of type- 1 servo s y s t e m as
An a s y m p t o t i c a l l y stable system w i l l be designed such t h a t f o r
t -> m, x(t),
f(t), and u(t) approach c o n s t a n t
values, denoted xss, fss, and us,
respectively. Further, f(t) -> 0 and
r(t)
=
r, t 2 0 as
A t steady state, one has
Since r(t)
i s a s t e p i n p u t , t h u s r(t)
=
r (constant).
f r o m Equation (2.2-21) and defining
subtracting Equation (2.2-22)
x(t) - xss = xe(t>
E(t>
w e have
- ESS = Ee(t)
By
where
ue(t> = -Q(t)
+
KiEe(t>
Define a new (n+ 1 ) th-order error vector e(t) by
then Equation (2.2-23) becomes
$(t) = &t)
+ Bue(t)
where
The control signal u,(t)
becomes
where
K=[K
I
-Ki]
The idea of f i r s t design stage i n type-1 servo system i s t o
design a stable ( n + l ) t h - o r d e r regular system t h a t w i l l b r i n g the
new error
c(t) t o
zero. And the s t a t e error equation of t h i s system
can be found by putting Equation (2.2-25) into Equation (2.2-24)
$(t) =
(-i
BK) a t )
Therefore, i f the desired eigenvalues o f m a t r i x
X-BK
are
28
specified as p l , p2 , ..., pn + I i n order t o have the zero steady state
e r r o r , the s t a t e feedback gain m a t r i x K and the i n t e g r a l gain
constant K i can be determined by the pole placement approach.
Now consider the s t a t e observer t o design the gain L. To
obtain the observer e r r o r equation, subtracting Equation ( 2 . 2 - 2 0 )
from Equation (2.2- 16), we have
x - i? = Ax+Bu - Ax--Bu-L(Cx-C%) = (A-LC) (x - 2 )
(2.2-26)
Define the difference between x and ii as the error vector e or
e = (A-LC)e
(2.2-27)
From Equation (2.2-27), we see that the dynamic behavior of
the e r r o r vector i s determined 5y the eigenvalues of m a t r i x A-LC.
I f the eigenvalues o f m a t r i x A-LC are chosen i n such a way that the
dynamic behavior of the error vector i s asymptotically stable and i s
adequately fast, then any error vector w i l l tend t o zero w i t h an
adequate speed. Since we assumed t h a t t h i s system i s completely
observable, the gain L of state observer approach can be chosen by
specification of the desired eigenvalues
A-LC.
F1, F2 , .... -pn
of the m a t r i x
A t t h i s point, one can f i n d the gain K, K i and L which makes
t h i s type-1 servo system have z e r o steady state error.
Next the closed-loop s t a t e equation o f t h i s type-1 servo
29
system i n FIGURE 2.2-4 w i l l be developed for future reference i n the
design steps.
Consider Equation (2.2- 1 6 ) - Equation (2.2-20);
Put Equati on(2.2- 1 9)into Equation (2.2- 16) t o obtain
~ ( t =) Ax(t) + B ( - E ( t ) + Kic(t) )
Put Equation (2.2- 17) into Equation (2.2- 18) t o obtain
Putting Equation ( 2 . 2 - 17), (2.2- 19)) and (2.2-28) into Equation (2.220) yields finally,
Thus, the combination of Equation (2.2-28), (2.2-29)) and (2.230) gives the closed-loop system as
-
?
A
LC
-C
-BK
A-BK-LC
BKi
13Ki
0
0
]
x(t)
%t)
-
SO)
+
,
[H ]
dt)
2-3 Gain Schedulinq
R e a l i s t i c models of
engineering s y s t e m s are t y p i c a l l y
nonlinear. In studying control system design, an important e f f e c t of
t h i s kind o f system emerges: the dynamic behavior of a system t o be
c o n t r o l l e d changes w i t h the operating region.
An approach t o
handling t h i s e f f e c t i s called "Gain Scheduling".
As f i r s t noted, current gain scheduling practice i s l i m i t e d t o
s l o w v a r i a t i o n of exogenous scheduling variables.
Thus i n the
considered model, the operating condition had t o be arranged so that
i t would be s p e c i f i e d by the value of one o r more exogenous
variables, then the gains w i l l be scheduled according t o the
instantaneous values of the exogenous variable. The model of the
system w i l l resemble as shown i n FIGURE 2.3-1.
w( t),exogenous (scheduling) variables
r(t)
r
Nonlinear
Controller
u(t)
Nonlinear
plant
FIGURE 2.3- 1 System f o r applying gain scheduling
The application of gain scheduling t o the controller design i s
divided into 4 steps:
1 , select a set of equilibrium points t o cover desired operating
range
2. linearize the plant around each equilibrium point
3. design a linear controller for each linearization
4. schedule the set of linear controllers
To determine an equilibrium point (step I ) , set
f(x,u,t)=O and
The linearization about an equilibrium point i n step 2 involves
expanding f and g i n a Taylor series at the equilibrium point and
neglecting the higher order terms.
32
The type 1 servo system w i l l be designed f o r each linear
controller i n step 3 as previously described.
Scheduling or interpolating the set of linear controllers i n the
l a s t step has the basic idea t o interpolate the linear c o n t r o l l e r a t
intermediate operating conditions. That is, a scheme i s devised f o r
changing the gains i n the c o n t r o l l e r s based on the operating
condition of the system. The details of scheduling techniques used
i n t h i s thesis w i l l be discussed i n chapter 4.4.
C h a ~ t e r3
M i s s i l e F l i a h t Control Problem
Consider m i s s i l e - a i r f r a m e c o n t r o l problem i l l u s t r a t e d i n
FI GURE 3- 1 .
attack
Fin defection
Velocity vector
FIGURE 3- 1 M i s s i l e Fl ight control problem
When the vehicle i s f l y i n g w i t h an angle of a t t a c k ( a ) , l i f t i s
developed.
T h i s l i f t may be represented as a c t i n g a t a c e n t r a l
l o c a t i o n ( c e n t e r o f pressure). The vehicle w i l l be s t a t i c a l l y s t a b l e
o r u n s t a b l e ( w i t h o u t c o r r e c t i v e t a i 1 d e f e c t i o n s ) depending on the
l o c a t i o h of the center of pressure r e l a t i v e t o t h e c e n t e r of mass [21.
The problem focused on i n t h i s t h e s i s i s t h a t o f c o n t r o l l i n g t h i s
vehicle t o t r a c k commanded normal acceleration by generating a t a i l
f i n defection angle. The a u t o p i l o t w h i c h needs t o be designed w i l l
34
accept a normal acceleration command f r o m some o u t e r guidance
system. The f i r s t p a r t of t h i s chapter w i l l introduce the description
of a hypothetical m i s s i l e model t h a t w i l l be used i n the f o l l o w i n g
design discussion. Some of the m i s s i l e ' s v a r i a b l e are measured by
gyros and accelerometers. The l a s t p a r t of t h i s chapter w i l l show
the requirements of the autopilot design. The process o f t h i s design
w i l l be discussed i n the next chapter.
3.1 Mathematical D e s c r i ~ t i o nof Missile Model
The m i s s i l e f l i g h t control problem used i n the t h e s i s design i s
shown i n FIGURE 3.1-1.
M( t)
6
b actuator
6
b a i r frame
-b accel erome t o r
-b
pitch rate
FIGURE 3.1- 1 The block diagram of m i s s i l e model
A i r f r a m e Dynamics
h(t>= &M(t)G[a(t>,6(t),M(t)lcos(a(t>>+q(t)
Actuator Dynamics
Output
Variables
a(t) = angle of attack, range -20'1 a 5 20'
M(t) = Mach number, range 2 M 4
q(t) = pitch rate.
GC(t)= commanded tail fin deflection angle
6(t) = actual tail fin deflection angle.
qc(t) = commanded normal acceleration.
qz(t) = actual normal acceleration.
note: The angles a r e measured i n degrees.
The a c c e l e r a t i o n i s measured i n gees
Simulation Variable
36
F o r simulation purposes, a state equation for Mach number i s
defined as
Aerodynamic Coefficients
Constants
where
(0.7) PoS/mv,
K,
=
Ax
= (0.7) PoSCa/m
Po = static pressure a t 20,000 f t
s = surface area = 0.44 f t 2
m
=
mass
=
13.98 slugs
=
973.3 l b s / f t 2
37
vs =
speed of sound a t 20,000 f t
=
1036.4 ft/sec
d = diameter =0.75 f t
IY = pitch moment of inertia
=
182.5 slug-ft2
Ca = drag coefficient = -1.5
=0.7
3.2 Desian Obiectives
The requirements of the design are as follows:
( 1 ) Obtain robust s t a b i l i t y over the operating range. The
operating range i s specified by the angle of attack
a and Mach
number M and consists of those points (a,M) such that
-200sas200
and 2 s M s
(
altitude = 20,000 f t . ) .
38
( 2 ) Track step normal acceleration commands w i t h t i m e
constants of approximately 0.25 second or less.
( 3 ) Maintain greater than 30 dB attenuation at 300 rad/sec f o r
the open-loop linearized transfer function w i t h the loop broken at
the actuator input. This requirement seeks t o avoid e x c i t i n g the
unmodelled structural dynamics.
Chapter 4
Gain Schedulina Desian
I n t h i s c h a p t e r t h e n o n l i n e a r s y s t e m design u s i n g a g a i n
scheduling technique w i l l be discussed.
An a u t o p i l o t w i l l be
designed i n o r d e r t o c o n t r o l t h e m i s s i l e p r o b l e m discussed i n
chapter 3.
By using the gain scheduling technique t h e a u t o p i l o t
design i s divided i n t o 4 steps as
1 , e q u i l i b r i u m point selection
2. l i n e a r i z a t i o n around each e q u i l i b r i u m p o i n t
3, l i n e a r control l e r designs
4. schedclling the set o f linear c o n t r o l l e r s .
Each o f these des'ign s t e p s w i l l be discussed n e x t
After
obtaining the a u t o p i l o t f r o m the design method, t h e local s t a b i l i t y
of the m i s s i l e w i l l be checked. And a t t h e end o f t h i s chapter t h e
s i m u l a t i o n by SIMULAB w i l l be applied t o t h e m i s s i l e i n order t o
check t h e m i s s i 1 e's performance.
4.1 Eauilibrium Point Selection
From t h e m a t h e m a t i c a l d e s c r i p t i o n i n Chapter 3, t h e m i s s i l e
model i s w r i t t e n as a set o f nonlinear d i f f e r e n t i a l equations as
where
x
=
a 4 X 1 state vector so that
Thus,
=
K,M(t)G[a(t),G(t),M(t)lcos(a(t)) + q(t)
=,
f l(x(t),u(t),w(t))
To determine the e q u i l i b r i u m p o i n t s of t h i s system, by
definition,we set f(x,u,y)
=
0. Thus the set of equilibrium poirlts
i s calculated and shown as follows:
and
6(t) = - Isgn(a(t))laJa(t)13
dm
+ bmla(t)12+ G,($M(~) -7)la(t)ll
,
f~(x(t),u(t),w(t))= 0, i m p l y i n g t h a t
and
q(t) = KaM(t)C,[a(t),6(t),M(t)lcos
(a(t)) = 0:
q(a,M) = -K,MCJa,G(a,M),Mlcos
(a)
and the constant operating point o f the output f u n c t i o n i s calculated
as
g(x(t),u(t>,w(t>)= y
rl,(t)
and
= KzM2(t)G[a(t),G(t),M(t)l:
rlz(a,M) = KzM2G[a,G(a,M),Ml
4.2 Linearization around each eauilibrium point.
The nonlinear plant i s given as
where
To linearize the nonlinear system,
we use the Taylor series
expansion of f and g around an equilibrium s t a t e and neglecting the
higher-order term of order greater than 2, which are assumed t o be
small, we have
where
Z(t)
= x(t)
- x(a,M)
G(t) = 1Z(t) - rlz(a,M)
The Jacoblan m a t r i c e s A(a,M),
-I
B(a,M),
C(a,M)are
calculated as
44
The c o e f f i c i e n t m a t r i c e s of the 1 ineari zed p l a n t are c a l c u l a t e d
v i a PROGRAMftl s h o w n i n appendix f o r any e q u i l i b r i u m p o i n t
s p e c i f i e d by (a,M).
4.3 Linear Controller Desians
As mentioned earlier, i n order t o design a c o n t r o l l e r t o c o n t r o l
nonlinear plants, i t i s necessary t o break the c o n t r o l design process
i n t o t w o steps. F i r s t , one m u s t design local linear c o n t r o l l e r s based
on 1 i n e a r i z a t i o n o f t h e n o n l i n e a r p l a n t s a t s e v e r a l d i f f e r e n t
operating conditions. Second, one m u s t i n t e r p o l a t e t h e gains of the
local designs. The process o f a linear c o n t r o l l e r design i s described
below.
I n designing these c o n t r o l l e r s , the p l a n t t h a t w e consider i s
t h e l i n e a r i z e d p l a n t c a l c u l a t e d frorn S e c t i o n 4.2, s i n c e i t i s
necessary t o design a c o n t r o l l e r f o r t h e l i n e a r i z e d p l a n t a t several
d i f f e r e n t operating points.
points at a
;1 2 , 3
Here, consider 3 d i f f e r e n t o p e r a t i n g
and (1;,4).
I t was previously observed i n
[9]t h a t the solutions are a f f e c t e d by v a r i a t i o n s i n Mach numbers and
o n l y w e a k l y a f f e c t e d by changes i n angle o f a t t a c k ; t h e r e f o r e ,
0
s e l e c t i n g an angle o f a t t a c k a t
10 f o r each o f t h r e e Mach numbers
r e p r e s e n t s a reasonable compromise i n t h a t t h i s value r e p r e s e n t s
the m i d p o i n t of the desired operating range. The f i r s t o b j e c t i v e f o r
45
t h i s s t e p i s , f o r f i x e d Mach number, the c o n t r o l l e r m u s t s t a b i l i z e a l l
p l a n t l i n e a r i z a t i o n s corresponding t o a l l values of
b e t w e e n -200 < a < 200
angle o f a t t a c k
By s y m m e t r y p r o p e r t i e s o f the p l a n t
description, one need consider only
$<
a < 2$
The type 1 servo system based on pole placement i s u t i l i z e d i n
order t o design the desired c o n t r o l l e r . Since some o f s t a t e variables
are not available f o r measurement, the s t a t e observer i s placed i n t o
t h i s servo system.
D e t a i l s about t h i s type-1 servo s y s t e m w e r e
given i n Section 2.2 f r o m w h i c h the closed -loop system i s described
In order t o meet the design o b j e c t i v e , the open-loop t r a n s f e r
f u n c t i o n of the l i n e a r i z e d system requires t h e loop t o be opened a t
the input to the actuator.
Before going f u r t h e r t o t h e c o n t r o l l e r
46
design step, the open-loop s y s t e m i s developed here. FIGURE 4.3- 1
shows a blclck diagram of the open-loop s y s t e m w h i c h i s developed
f r o m FIGURE 2.2-4.
FIGURE 4 3 - 1 B l o c k d 1 2 c r w -
gf
o a e n - l o g p 5ys:en
The dynamics o f the open-loop system i s described as
-
r
A
0
0
LC A-LC 0
-C
0
O J
1
d t i 1
%(ti + [ E 3 ] u l ( t )
- f(t)
J
I n Chapter 2.2, a method t o f i n d the g a i n
K o f the p o l e
placement design and the gain L of the s t a t e observer w a s given by
using Ackermann's formula. However, i n t h i s c o n t r o l l e r design step
these can be found d i r e c t l y by using the "PLACE" command i n the
Control System Toolbox of MATLAB.
The f i r s t design i s calculated i n PROGRAM #2. The p l a n t used
i s t h e l i n e a r i z e d p l a n t f r o m PROGRAMXl.
suitable gain vector
In determining the
K that gives the best overall system
performance, the several d i f f e r e n t m a t r i c e s
K are examined v i a
computer s i m u l a t i o n t o o b t a i n the response c h a r a c t e r i s t i c s o f the
s y s t e m The m a t r i x K i s based on the s e l e c t i o n o f the eigenvalues
w h i c h give the desired c h a r a c t e r i s t i c equation. I n our design, a f t e r
several s i m u l a t i o n s t o check the system c h a r a c t e r i s t i c s , i t i s found
t h a t t h e e i genvalues a t [ - 3 6 . 3 , - 3 6 . 9 6 + 0 . 6 6 i , - 3 6 . 9 6 - 0 . 6 6 i ,
3 7 . 6 2 + 1 . 3 2 i , -37.62- 1 . 3 2 i l give the b e s t gain m a t r i x
K
-
that is
suitable f o r the design objectives.
The observer gain m a t r i c e s L are considered i n t h e same
manner as the gain
K .
48
The best gain m a t r i x L which gives the
suitable response for the design objectives i s defined by placing the
eigenvalues for states observer technique at [-6 16+ 1 1 i, -61 6-1 1 i, 627+22i, -627-2213.
In addition, PROGRAM "2 simulates the closed-loop system
step response and the frequency response of the open-loop system
From PROGRAM #2, the gain K, K i and L for the controller a t
0
the constant equi librium point
0
0
(a,M); ( 10,2), ( 1 0,3), and ( 10,4) are
given respectively as
at fixed Mach number 2:
KK2
=
[-5.7 137e+00, -4.56 13e-0 1 , -4.0079e-0 1 , - 1 . 1 296e-031
Ki2
=
6.3689e+O1
KL2'= [-7.7941 e+02, -7.6420e+04, 2.0806e+03, -2.5828e+051
at fixed Mach number 3:
KK3
=
Ki3
=
[-2.2529e+00, - 1.7727e-0 1 , -4.0539e-0 1 , - 1 . 1 405e-031
1.4099e+01
KL3'= [-4.0547e+02, -3.9609e+04, 9.19 1 8e+02, - 1.1657e+05]
at fixed Mach Number 4:
KK4 = [ - 1.3009e+00, -9.5867e-02, -4.0555e-0 1 , - 1 . 1 457e-031
K i 4 = 5.0734e+00
where
KK2=the gain K design a t f i x e d Mach number 2
K i 2 = t h e gain K i design a t f i x e d Mach number 2
KL2=the gain L design a t f i x e d Mach number 2
and KK3, K i 3 , KL3, KK4, K i 4 and KL4 are defined i n the same but a t
the f i x e d Mach number 3 and 4 r e s p e c t i v e l y .
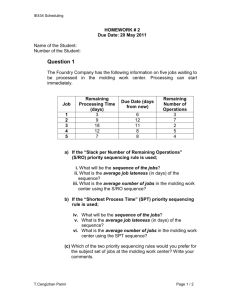
The s t e p response of the closed-loop l i n e a r s y s t e m a t t h r e e
c o n s t a n t o p e r a t i n g p o i n t s a r e p i c t u r e d i n FIGURE4.3-2, w h i c h
i l l u s t r a t e s t h a t t h e o u t p u t t r a c k s t h e s t e p command w i t h t i m e
c o n s t a n t s l e s s than 0 . 2 5 sec. FIGURE 4 . 3 - 3 describes t h e frequency
response of t h e open-lcop system a t those e q u i l i b r i u m points; w i t h a
frequency of 3 0 0 rad/sec, a l l t h e magnitude are l e s s than -30 dB.
B o t h graphs d e m o n s t r a t e t h a t the p r e v i o u s l y s p e c i f i e d eigenvalues
y i e l d gains K, K i and L w h i c h achieve t h e design o b j e c t i v e s .
0
FIGURE 4.3-2 Step Response of closed-loop system at M=2, 3 , and 4 ,alfa= 10
Frequency (radlsec)
0
FIGURE 4.3-3 Frequency Response of open loop system at M=2, 3, and 4 ,alfa= 1 0
51
As p r e v i o u s l y noted, a c o n t r o l l e r a t a f i x e d Mach number m u s t
s a t i s f y t h e design o b j e c t i v e s over t h e range o f an angle of a t t a c k
between
6 to
200 Thus PROGRAM "3 i s c r e a t e d i n o r d e r t o check
t h e s t a b i l i t y o f the s y s t e m as t h e angle o f a t t a c k v a r i e s .
This
program uses t h e c o n s t a n t gain K, K i and L found e a r l i e r a t each
f i x e d constant operating points.
The same p l a n t c o e f f i c i e n t s
m a t r i c e s a t those p o i n t s are use t o be t h e c o e f f i c i e n t s m a t r i c e s of
the s t a t e observer i n the considered system.
For convenience i n representing the design s t e p and output, the
a u t h o r n o w w i l l f i r s t consider t h e c o n t r o l l e r design s t e p a t t h e
f i x e d Mach number 2.
The f i x e d Mach number 3 and 4 w i l l be
addressed l a t e r .
The s i m u l a t i o n a r e a p p l i e d t o t h e c o n t r o l l e r w h i c h a r e
designed i n PROGRAMs3 t o check t h e s t a b i l i t y of t h e s y s t e m as the
angle of a t t a c k vary b e t w e e n
to
26
We s i m u l a t e d PROGRAMz3
w i t h a l l t h e angle of a t t a c k i n t h e range of i n t e r e s t .
Around t h e
0
c o n s t a n t o p e r a t i n g design p o i n t (a,M)
=
(10,2), t h e c o n t r o l l e r can
s a t i s f y a l l the design o b j e c t i v e s , but when t h e angles of a t t a c k are
changed, t h e c o n t r o l l e r performance i s degraded.
I t means t h a t the
c o n t r o l l e r i s able t o s t a b i l i z e t h e s y s t e m o n l y a t t h e v a l u e s o f
0
a t t a c k w h i c h do not d i f f e r much f r o m the design p o i n t , a = l o . When
t h e angle o f a t t a c k changes s i g n i f i c a n t l y , t h e c o n t r o l l e r cannot
52
stabilize the system.
A t t e m p t s t o s e l e c t d i f f e r e n t design p o i n t s
corresponding t o d i f f e r e n t angle o f a t t a c k y i e l d comparable r e s u l t s .
The l i n e a r s i m u l a t i o n s a t d i f f e r e n t angle o f a t t a c k a r e s h o w n
i n FIGURE 4 . 3 - 4 and FIGURE 4 . 3 - 5 .
FIGURE 4 . 3 - 4 s h o w s t h e s t e p
responses o f the closed-loop s y s t e m a t the c o n s t a n t Mach number 2
0
0
0
and t h e angle o f a t t a c k 0, 10, and 2 0 . The frequency responses o f
t h e open-loop s y s t e m a t t h e same design p o i n t s v a l u e s a r e displayed
i n FIGURE 4.3-5. The p r o b l e m o f t h e c o n t r o l l e r w h i c h m e n t i o n e d a r e
c l e a r l y s h o w n f r o m these graphs
Now consider the design step a t t h e f i x e d Mach number 3 and 4.
We a l s o s i m u l a t e the s y s t e m a t these f i x e d Mach number w i t h a l l the
0
0
angle o f a t t a c k f r o m 0 t o 20. The p r o b l e m encountered a t t h e f i x e d
Mach numbers 3 and 4 r e s e m b l e as s h o w n t h a t f a c e d a t f i x e d Mach
number 2.
With
s i g n i f i c a n t changes o f t h e angle o f a t t a c k , t h e
c o n t r o l l e r performance i s degraded. FIGURE 4 . 3 - 6 - FIGURE 4 . 3 - 9 are
m a n i p u l a t e d as t h e same a s FIGURE 4.3-4, and FIGURE 4.3-5. FIGURE
4 . 3 - 6 , and FIGURE 4.3-8 s h o w s t e p r e s p o n s e o f t h e c l o s e d - l o o p
s y s t e m a t f i x e d Mach number 3 and 4 r e s p e c t i v e l y .
0
0
I n t h e s e graph
0
t h e d i s t i n c t angle o f a t t a c k a t 0, 10 and 20 a r e chosen. FIGURE 4.3-
7, and FIGURE 4 . 3 - 9 i l l u s t r a t e t h e open-loop's f r e q u e n c y responses
a t t h e same angle o f a t t a c k values f o r f i x e d Mach number 3 and 4.
L
......... :a d o
-: a-10'
1.5 -
--
++++ : a -20'
-
1-
a
*+*
n.
a
0
-
-
-0.5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
time(sec)
FIGURE 4.3-4 Step Response of closed-loop system at M=2.
Frequency (radlsec)
FIGURE 4.3-5 Frequency Response of open loop system at M=2.
0.5
time(sec)
FIGURE 4.3-6 Step Response of closed-loop system at M=3.
Frequency (radiscc)
FIGURE 4.3-7 Frequency Response of open loop system a t N=3.
time(sec)
FIGURE 4.3-8 Step Response of closed-loop system at M=4.
Frequency (radlsec)
FIGURE 4.3-9 Frequency Response of open loop system a t W-4.
56
We redesign the c o n t r o l l e r again as c a l c u l a t e i n PROGRAM # 4 .
Once again, f i r s t consider the design s t e p a t the f i x e d Mach number 2
and then a t the f i x e d Mach numbers 3 and 4.
In t h e new design, use t h e same gain K, K i , and L b u t l e t the
l i n e a r i z e d p l a n t c o e f f i c i e n t m a t r i c e s used i n the s t a t e observer v a r y
w i t h angle o f a t t a c k as i n d i c a t e d i n S e c t i o n 4.2. By l e t t i n g t h e
c o e f f i c i e n t m a t r i c e s of t h e observer depend on angle o f a t t a c k , step
response and frequency response o f t h e 1 i n e a r i z e d m i s s i l e model
w i t h type- 1 servo s y s t e m a t f i x e d Mach number 2 m e e t t h e design
0
0
o b j e c t i v e s a t a l l angle o f a t t a c k b e t w e e n 0 t o 20. Three d i f f e r e n t
angle of a t t a c k
6 ;1
0
and 2 0 are chosen t o v e r i f y these r e s u l t s as
shown i n FIGURE 4.3- 10 and FIGURE 4.3- 1 1 .
Next, consider the c o n t r o l l e r design a t the f i x e d Mach numbers
3 and 4 by u s i n g the same c o n s i d e r a t i o n b u t changing t h e gains (K,
K i , and L).
The s i m u l a t i o n r e s u l t s are also the same as w e discuss
i n design a t f i x e d Mach number 2 f o r a l l the angle o f a t t a c k b e t w e e n
0
0
0 t o 20. The closed-loop s t e p responses and open-loop frequency
responses are shown i n FIGURE 4.3- 12 and FIGURE 4.3-1 3 f o r f i x e d
Mach number 3 and i n FIGURE 4 . 3 - 1 4 and FIGURE 4 . 3 - 1 5 f o r f i x e d
Mach number 4 , r e s p e c t i v e l y .
The s i m u l a t i o n response a t t h r e e
d i f f e r e n t angles o f a t t a c k are shown in these graphs.
Thus w e can conclude t h a t t h e l i n e a r c o n t r o l l e r w h i c h i s
57
designed by t h e chosen eigenvalues g i v e n e a r l i e r and l e t t i n g t h e
c o e f f i c i e n t s m a t r i c e s of t h e observer p a r t of t h e c o n t r o l l e r depend
on angle o f a t t a c k as w e l l as Mach number, t h e l i n e a r i z e d closedloop s y s t e m f o r f i x e d Mach number (M=2,3,4) and a l l angle of a t t a c k
i s s t a b l e and m e e t s the design s p e c i f i c a t i o n s .
time(sec)
FIGURE 4.3- 10 Step Response of closed-loop system at M=2.
tirne(sec)
FIGURE 4.3- 1 2 Step Response of closed-loop system at M=3.
Frequency (radlsec)
FIGURE 4.3- 13 Frequency Response of open loop system at M=3.
FIGURE 4.3- 1 5 Frequency Response of open loop system at M=4.
4.4 Schedulina the Set of Linear Controllers
Gain scheduling i s broken i n t o t w o s t e p s .
The f i r s t s t e p
involves designing a local c o n t r o l l e r based on 1 i n e a r i z a t i o n of the
nonlinear p l a n t a t several d i f f e r e n t e q u i l i b r i u m p o i n t s . T h i s w a s
accomplished i n t h e p r e v i o u s s e c t i o n .
The l o c a l c o n t r o l l e r w a s
0
0
designed a t three d i f f e r e n t equi l i b r i u m p o i n t s ( ( a,M)=( 10,2), ( 10,3),
0
1
0
4 Each e q u i l i b r i u m point gives a s p e c i f i e d gain w h i c h makes
the c o n t r o l l e r capable of s a t i s f y i n g the system requirements l o c a l l y
around each design point.
The second step, t o be discussed i n t h i s chapter, r e q u i r e s
i n t e r p o l a t i n g , or "schedul ing", the qains of t h e l i n e a r designs t o
o b t a i n a nonlinear c o n t r o l l e r . The three s p e c i f i e d gains f r o m t h e
local c o n t r o l l e r are r e w r i t t e n as f o l l o w s :
A t f i x e d Mach number 2:
A t f i x e d Mach number 3 :
KK3
=
[-2.2529e+00, - 1.7727e-0 1 , -4.0539e-0 1 , - 1.1 405e-031
Ki3
=
1.4099e+O1
At fixed Mach Number 4:
KK4
=
[ - 1.3009e+00, -9.5867e-02, -4.0555e-0 1, - 1 . 1 457e-031
Ki4
=
5.0734e+00
KL4'= [-2.7506e+02, -2.68 1 3e+04, 5.1287e=02, -6.6569e+041
It i s known from the linear controller analysis that the gains
at each fixed Mach number can stabilize the linearized plant at the
f i x e d number and over the entire range of the angle of attack
0
0
between 0 to 20. In considering this problem, an attempt i s made to
schedule a l l these gains when the Mach nurriber i s different from the
fixed point. This means that the gain i s defined when the value of
the Mach number l i e s between the Mach numbers
2 and 3
or the
Mach numbers 3 and 4, or outside the range 2 5 M i 4.
F o r the gain scheduling method, K i i s considered f i r s t . At the
fixed Mach numbers 2, 3 and 4, the values of the gain K i are known.
To f a c i l i t a t e an understanding of the discussion that follows, these
3 values a r e shown in the FIGURE 4.4- 1 .
From t h i s figure, one can see that a t each fixed Mach number
2, 3, and 4, the gain K i i s set a t the known values. Thus, when the
Mach number i n the considered system l i e s a t one of these fixed
63
points, the appropriate gain K i w i l l be used i n the controller.
2
3
4
Mach number
FIGURE 4.4- 1 Scheduling the gain Ki
Now consider the points between the f i x e d Mach numbers 2
and 3 and draw a l i n e between these t w o points. An equation can
then be created f o r t h i s line. The same can be done between the
fixed Mach numbers 3 and 4.
Recall now, the equation of the l i n e j o i n i n g between t w o
poi n t s P(xi,y1) and P(x2,yz):
Using t h i s t w o equations, one can obtain the gain K i as a
function of Mach number, w r i t t e n Ki(M). Therefore, when the Mach
number i s given between either the t w o fixed points 2 and 3 or the
t w o fixed points 3 and 4, one can find the gain K i
64
related t o the
corresponding Mach number.
One can schedule the gains
K and the gain
L, i n the same
manner t o obtain K(M) and L(M).
Gain "scheduling" i s the most important component of
the
nonlinear controller design and w i 1 1 be u t i l i z e d f o r the remainder of
t h i s thesis. The M - f i l e from MATLAB i s w r i t t e n t o calculate this.
The M-fi le i s named "schedu1ing.m" and i s described i n PROGRAM
#5.
Using PROGRAM l f 5 the gain scheduling i s created f o r the
nonl inear controller.
With the gain scheduling, i t i s expected that
our nonlinear controller w i 11 stabilize the nonlinear plant over the
e n t i r e operating range.
I n order t o c o n f i r m t h i s expectation, the
local s t a b i l i t y around any equilibrium point i n the desired range w i l l
be examined f i r s t and then the overall performance of the nonlinear
system w i t h the designed controller w i l l be examined by means of
simulation using SIMULAB.
- Checking the local stability of the linearized system.
For the discussion of local s t a b i l i t y , consider the nonlinear
control ler, the "Autopilot ". First, connect the autopilot t o the plant
65
and close t h i s loop. The block diagram i s i l l u s t r a t e d i n FIGURE 4.4-
-
nz
nc
Autopilot
) missile/actuator
.
FIGURE 4.4- 2 Block diagram of the missile model w i t h nonlinear controller
The closed-loop dynamic system i s given as
where
t=n,-nz
6, = -K(M)Z + Ki(M)t
where
fandgarethenonlinearfunctionofthemissilemodel
66
A t the constant operating point
fc,
(x,:,f,h,~)
=
o which implies that
Thus, a t any closed-loop constant o p e r a t i n g p o i n t , w e have
?(a,M)
so t h a t
= x(a,M)
Sz(a,M) = nz(a,M)
f(a,M) = &[Wa,M)
- K(M)x(a,M)I .
Next, 1 i n e a r i z a t i o n o f the nonlinear closed-loop s y s t e m around
t h i s set o f constant operating points yields a set o f linearized
s y s t e m s w h o s e p r o p e r t i e s w i 11 be analyzed. The J a c o b i a n m a t r i c e s
f o r t h i s l i n e a r i z a t i o n method are given a s f o l l o w s .
F r o m t h e closed-loop s y s t e m :
Define
G = %a3+bna2+cn(2-$M)a,
G,= 3 % a 2 + 2 b a + c , (2-$M)
The Jacobian m a t r i c e s t h a t describe t h e l i n e a r i z a t i o n of the
n o n l i n e a r c l o s e d - l o o p s y s t e m i n FIGURE 4.4-2 a r e c r e a t e d i n
PROGRAMlt6,
Included i n t h i s p r o g r a m i s t h e s i m u l a t e d s t e p
response of t h e linearized closed-loop s y s t e m i n order t o check t h e
local s t a b i l i t y of the system. For t h e l o c a l s t a b i l i t y , t h e l i n e a r i z e d
s y s t e m s w h i c h are s i m u l a t e d a t any c o n s t a n t o p e r a t i n g p o i n t s
should provide stable response i n the e n t i r e range o f i n t e r e s t .
A s f i r s t m e n t i o n f o r t h e l o c a l s t a b i l i t y check, m o r e t h a n
hundred p o i n t s o f the f i x e d Mach number and t h e angle o f a t t a c k i n
68
the interested range are simulated and checked. Each step response
f r o m those simulations show the a b i l i t y to track the step command
w h i c h indicated the local s t a b i l i t y of the linearized system. Also,
these step responses s a t i s f y the design objectives of t i m e constant
less than 0 . 2 5 second.
To v e r i f y the conclusion, the simulation a t the angle of attack
00 and
0
2 0 w i t h the f i x e d Mach number 2.3, 2.3, 3.3, and 3.7 are
examined.
The step response which provided the s t a b i l i t y of the
l i n e a r i z e d s y s t e m w i t h t i m e c o n s t a n t l y than 0 . 2 5 second are
i l l u s t r a t e d i n FIGURE 4.4-3 and FIGURE 4.4-5. The frequency
response of the open-loop system w h i c h less than - 3 0 dB a t 3 0 0
radian/second are shown i n FIGURE 4.4-4 and FIGURE 4.4-6.
time(sec)
0
FIGURE 4.4-3 Step Response of the linearized system at alfa=O.
Frequency (radlsec)
0
FIGURE 4.4-4 Frequency Response of open loop linearized system at alfa=O.
FIGURE 4.4-5 Step Response of the linearized system at alfa.26
Frequency (rad/sec)
0
FIGURE 4.4- 6 Frequency Response of open loop linearized system a t alfa=20.
71
- Checking Performance of the Nonlinear Controller
Previously, a nonlinear a u t o p i l o t i s created by scheduling the
gains of the 1 inear c o n t r o l l e r s designed a t 3 d i f f e r e n t e q u i l i b r i u m
points. A t the conclusion o f t h a t chapter, local s t a b i l i t y around any
e q u i l i b r i u m p o i n t o f t h e s y s t e m w a s checked.
The r e s u l t s
demonstrated t h a t the autopi l o t can s t a b i l i z e t h e nonl inear system
l o c a l l y around any operating point i n the desired range.
Since w e r e q u i r e t h a t t h e a u t o p i l o t s t a b i l i z e t h e s y s t e m
throughout the e n t i r e operating range, a program f o r s i m u l a t i n g
nonlinear dynamic systems, SIMULAB, w i 1 1 be employed i n order t o
verify this stability.
For s i m u l a t i o n purpose, t h e a u t o p i l o t i s connected t o t h e
m i s s i l e as shown i n FIGURE 4 . 4 - 7 . The v a r i a b l e s i n t h i s b l o c k
diagram t h a t are fedback are the actual v e r t i c a l a c c e l e r a t i o n ( e t a )
and the Mach number (M). Note; the Mach number generated in t h i s
program i s not p r o p e r l y p a r t o f t h e p l a n t b u t i t i s included f o r
s i m u l a t i o n purposes. PROGRAMZ7 and *8 contain t h e M-f i l e s o f t h e
s - f u n c t i o n s i l l u s t r a t e i n FIGURE 4.4-7.
" A u t o p i 1ot.m" i s an M - f i l e
w h i c h describes the autopi l o t , the designed c o n t r o l l e r . " M i s s i l e . m n
also, i s an M - f i l e w h i c h i s used t o describe the m i s s i l e and a c t u a t o r
dynamics.
73
To obtain the response of t h i s system over the e n t i r e range of
the Mach number 2 and 4, the Mach number are consider as 4 range;
4.0-3.5, 3.5-3.0, 3.0-2.5, and 2.5-2.0. The simulations are designed
t o s i m u l a t e each of these range. The f i r s t s i m u l a t i o n output are
shown i n FIGURE 4.4-8. The graph shows the response of the system
compared to the step command.
system
I t show that the response of the
can track the step command w i t h t i m e constant less than
0.25 second which i s the requirement of the design objectives. Also,
i n FIGURE 4.4-8 , the Mach number p r o f i l e ( s t a r t i n g a t Mach number
=
4)i s shown.
I n FIGURE 4 . 4 - 9 - FIGURE 4.4-1 1 i l l u s t r a t e the s i m u l a t i o n
output as the same as i n FIGURE 4 4 - 8 . The difference i n these graph
i s the range of the Mach number. From these graphs, one obviously
sees t h a t no m a t t e r what the range of the Mach number are
considered, the system i s able to track the step command w i t h t i m e
constant less than 0.25 second. Thus , w i t h these data, i t i s clearly
show t h a t the dynamic c o n t r o l l e r y i e l d s stable and well-behaved
response which s a t i s f i e s the design objectives.
40
.----step command
-
acceleration
i
-
..
I
-
,
I
-
-
-10-
-20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
time(sec)
FIGURE 4.4-8 Step Response of the missile model starting at M=4.
time(sec)
Mach number for simulation i n FIGURE 4.4-8,
- - - - - - step command
-
-
acceleration
-
-
-
-10 -
-20.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
FIGURE 4.4-9 Step Response of the missile model starting at M=3.5
time(sec)
Mach number for simulation i n FIGURE 4.4-9.
time(sec)
FIGURE 4.4- 10 Step Response of the missile model starting at M=3.
time(scc)
Mach number for simulation i n FIGURE 4.4- 10.
time(sec)
FIGURE 4.4- 1 1 Step Response of the missile model starting at M=2.5.
time(sec)
Mach number for simulation in FIGURE 4.4- 1 1 .
Chapter 5
Summary and Conclusions
In t h i s thesis, w e study the design o f an a u t o p i l o t by applying
gain schedul ing, new c o n t r o l l e r design technique, t o the example of
nonlinear system.
scheduling
As w e mentioned e a r l i e r , a l t h o u g h t h e gain
i s a successful
technique
i n many e n g i n e e r i n g
application, i t has a r e s t r i c t i o n on the exogenous variable w h i c h had
t o vary slowly.
I n the example problem o r m i s s i l e f i g h t c o n t r o l
p r o b l e m , t h e Mach number i s considered t o be t h i s exogenous
var iable.
In Chapter 3, a l l tne matheniatics d e s c r i p t i o n of t h e m i s s i l e
problem together w i t h a s t a t e equation o f t h e Mach number w e r e
defined ( A s t a t e equation f o r the Mach number w a s n o t a proper p a r t
o f t h e m i s s i l e s y s t e m but t h i s equation w a s necessary i n t h e
s i m u l a t i o n p a r t f o r checking the performance o f t h e autopi lot.).
The d e t a i l s o f the design procedure w e r e discussed i n Chapter
4. F i r s t , the linear c o n t r o l l e r s were designed f r o m l i n e a r i z e d plant
data a t 3 d i f f e r e n t constant operating p o i n t s . Since the c o n t r o l l e r s
designed there used 1 inear t ime-invariant technique, our c o n t r o l l e r s
can guarantee only local performance and nominal s t a b i l i t y o f t h e
m i s s i l e . The open-loop frequency response of the 1 inearized system
79
s h o w s t h a t a t 300 radian/second the magnitude w a s l e s s than -30
dB. T h a t i s one o f t h e designed r e q u i r e m e n t s t h a t seeks t o a v o i d
e x c i t i n g t h e unmodel l e d s t r u c t u r a l dynamics.
L a s t , t h e gains o f
those c o n t r o l l e r are scheduled, and the a u t o p i l o t w i t h t h e scheduled
g a i n s w a s s i m u l a t e d t o check f o r t h e m i s s i l e p e r f o r m a n c e .
The
r e s u l t f r o m t h e s i m u l a t i o n show t h e a b i l i t y o f t h e a u t o p i l o t t o
0
0
s t a b i l i z e the s y s t e m w i t h i n the operating range (-20 5 a _ <
20 and 2 5
M 3 4 ). T h i s r e s u l t i s also s a t i s f i e s the design o b j e c t i v e s .
Since t h e m i s s i l e ' s performance m e t a l l design o b j e c t i v e s , i t
i s concluded t h a t t h e a u t o p i l o t , t h e c o n t r o l l e r , designed by u s i n g a
gain scheduling i s achieved.
References
[I].
Doebelin, E. O., " C o n t r o l S y s t e m P r i n c i p l e s a n d D e s i g n " . J o h n
W i l e y & Sons, Inc., 1 9 8 5 .
[ 2 ] . Dragoslav, D. S., " N o n l i n e a r S y s t e m s " . J o h n W i l e y & Sons, I n c . ,
1969.
[3].
K a i 1 a t h , T., " L i n e a r S y s t e m s " .
P r e n t i c e - H a l 1,
I n c . ,New
Jersey, 1 980.
[4]. K h a l i l , H. K.,and
K o k o t o v i c , P. V., "On S t a b i l i t y P r o p e r t i e s o f
N o n l i n e a r S y s t e m s w i t h S l o w l y V a r y i n g I n p u t s " , l EEE T r a n s a c t i o n s
on A u t o m a t i c Control, v o l . 36, no. 2, pp. 2 2 9 , 1 9 9 1 .
151. L a w r e n c e , D. A,, and Rugh, W. J., "On a S t a b i l i t y T h e o r e m f o r
Nonl i n e a r S y s t e m s w i t h S l o w l y V a r y i n g I n p u t s " . l EEE T r a n s a c t i o n s
on A u t o m a t i c C o n t r o l , v o l 35, no, 7, pp. 8 6 0 - 8 6 4 , 1 9 9 0 .
[61. Ogata, K., "Modern C o n t r o l Engineering ". P r e n t i ce-Hall, I nc. ,New
Jersey, 1990.
t
171. P h i l l i p s , C. L., and Harbor, R. D., "Feedback C o n t r o l S y s t e m s "
P r e n t i ce-Hal 1, Inc. ,New J e r s e y , 1 9 8 8 .
[81. P h i l l i p s , C. L.,and Nagle, H. T., " D i g i t a l C o n t r o l S y s t e m A n a l y s i s
and D e s i g n ". P r e n t i ce-Hall, I nc. ,New J e r s e y , 1 9 9 0 .
81
[9]. R e i c h e r t , R., T., " D y n a m i c S c h e d u l i n g o f Modern-Robust-Control
A u t o p i l o t Designs f o r M i s s i l e
".
IEEE C o n t r o l S y s t e m Magazine,
october, pp.35-42, 1992.
[ 101. Reichert,R. T., " G a i n S c h e d u l i n g f o r H - l n f i n i t y C o n t r o l l e r s : A
Flight Control Example". Technical
Report,The John Hopkins
U n i v e r s i t y , ECE, 9 2 - 9 3 .
[1
11. Rugh,
W. J., " A n a l y t i c a l F r a m e w o r k f o r Gain S c h e d u l i n g " , IEEE
c o n t r o l S y s t e m s Magazine, v o l . 1 1 , no. 1 , pp. 7 9 - 8 4 , 1 9 9 1 .
[12].
Shamma, J. S.,and A t h a n s , M., " A n a l y s i s o f Gain S c h e d u l e d
Control f o r Nonlinear Plants
" ,
l EEE T r a n s a c t i o n s on A u t o m a t i c
C o n t r o l , v o l . 35, no. 8, pp. 8 9 8 - 9 0 7 , 1 9 9 0 .
[13].
Shamma, J. S.,and A t h a n s , M., " G a i n S c h e d u l i n g P o t e n t i a l
Hazards and P o s s i b l e Remedies " . l EEE c o n t r o l S y s t e m s Magazine, v o l .
12, no. 3, pp. 10 1 - 1 0 7 , 1 9 9 2 .
[ 141. S l o t i n e , J.-J., E., " A p p l i e d N o n l i n e a r C o n t r o l " . P r e n t i c e - H a l l ,
I n c . ,New J e r s e y , 1 9 9 1
[ 151.
V i dyasagar, M., "Nonl i n e a r S y s t e m A n a l y s i s ". P r e n t i c e - H a l l ,
I n c . , New J e r s e y , 1 9 7 8 .
% PROGRAM # 1
% Linearization of nonlinear system
m=input('The value of Mach number (m)=')
alfa=input('The value of the angle of attack (alfa) = ' )
%
%
Airframe and actuator constants
Kalfa=0.02069;
damp=0.7;
%
%
Kq=l. 23196;
Wa=150;
Kz121.4432;
Ax=32.1648;
Some constants that change from degree to radian
alfan= alfa*pi/l80;
Kalfan= 1.18587;
Kzn= 0.6661697;
Kqn=70.586;
% Aerodynamic coefficients
%
an=0.000103;
bn=-0.00945;
cn=-0.1696;
am-0.000215;
bm=-0.0195;
cm=0.051;
Cn=an*alfaA3+bn*alfaA2+cnf(2-m/3)*alfa;
~m=am+alfa~3+bm*alfa^2+cm*(8*m/3-7)*alfa;
%
%
dn=-0.034;
dm=-0.206;
Differential values
cnd=3*an*alfaA2+2*bn*alfa+cnt(2-m/3);
~md=3*am*alfa~2+2*bm+alfa+cmt(8fm/3-7);
delta=-cm/dm;
.
%
Jacobian matrices
8
all=~alfan*m*(Cnd*cos(alfan)-(Cn+dnfdelta)*sin(alfan)*pi/l80);
a12=1;
al3=Kalfan*m*dn*cos(alfan);
a14=0;
a21=Kqn*mA2*Cmd;
a22=O;
a23=Kqn*mA2*dm;
a24=0;
a31=0;
a32=0;
a33=0;
a34=1;
a4 1-0;
a42=O;
a4 3=-WaA2;
a44=-2 *damp*Wa;
%
%
The the linearized system
aa=[all,al2,a13,a14;a21,aZZ,a22Ia23,a24;a31la32,a33la34;a4lla42la43la44]
bb=[bll;b21;b31;b41]
cc=[cll,c12,~13,~14]
% PROGRAM # 2
% ~inearizationof
A2
nonlinear system
m=input ('The value of Mach number (m) = ' )
alfa=input('The value of the angle of attack (alfa) = ' I
%
% Airframe and actuator constant
Kalfa=0.02069;
damp=O.7;
%
%
Kq=1.23196;
Wa=150;
Kz=21.4432;
Ax=32.1648;
Some constant that change from degree to radian
alfan= alfa*pi/l80;
Kalfan= 1.18587;
%
%
Aerodynamic coefficients
%
%
Some differential value
%
%
Jacobian matrix
Kzn= 0.6661697;
Kqn=70.586;
ades=[all,al2,al3,al4;a21,a22,a23,a24;a3l,a32,a33,a34;a4l,a42,a43,a44];
bdes=[bll;b21;b31;b41];
cdes=[cll,cl2,cl3,cl4];
% sk=pole locatin
%
%
%
%
%
Controller design step
Finding the gain K for poles placement
sk=the desired eigenvalues
q=[0;0;0;01;
sk=[-36.3,-36.96+0.66*i,-36.96-0.66*i,-37.62+1.32*i,-37.62-1.32*il;
abar=[ades,q;-cdes,OI;
bbar= [bdes;01 ;
kk=place(abar,bbar,sk);
A3
% Finding the gain L for states observer
% sl=the desired eigenvalues
%
Finging the step response for the closed-loop system
aclose=[ades -bdesek bdes*ki;l*cdes ades-l*cdes-bdes*kbdes*ki;-cdesq' 01;
bclose= [q;q;11 ;
cclose=[cdes q' 0 I ;
dclose=O;
t=linspace(O,. 5 ) ;
[yclose,xclose]=step(aclose,h~1ose,cclose,dclose,
1,t) ;
plot it,yclose),grid
title(' GRAPH-? Step response for closed-loop system ' )
xlabel('time(sec)'),ylabel('output')
pause
%
Finding the frequency response of the open-loop system
qs=[s#q.q#sl;
aopen=[ades,qq,q;l*cdes,ades,ades-l*cdes,q;-cdes,q',O];
bopen=[bdes;bdes;Ol;
copen=[q', -k,ki j ;
dopen=O;
[mag,phase,w]=bode(aopen,bopen,copen,dopen,1);
semilogx(w,20*log(mag)) ,grid
title('GFAPH-? Frequency response of the open-loop system')
xlabel('Frequency (rad/sec)');ylabel('Magnitude (dB)' ) ;
% PROGRAM # 3
% Design the Type 1 servo system(use the coefficients matrices
8 of the state observer the same as the plant coefficients
% matrices at design point.
%
m= 2
alfa=input('The value of the angle of attack ( a l f a )
= I )
% Airframe and actuator constants
%
Kalfa=0.02069;
damp=O. 7 ;
Kqi1.23196;
Wa-150;
Kz=21.4432;
Ax=32.1648;
% Some constants that change from degree to radian
%
alfans alfa*pi/l80;
Kalfan= 1.18587;
Kzn= 0.6661697;
Kqnz70.586;
% Aerodynamic coefficients
%
an=0.000103;
bn=-0.00945;
cn=-0.1696;
am=O.000215;
bm=-0.0195;
cm=O. 051;
~n=an*alfa^3+bn*alfa*Z+cn+(2-m73)+alfa;
~m=am*alfa~3+brn*alfa~2+cm*(8*m/3-7)Palfa;
& I = - 0 .034;
dm=-0.206;
% Some differential values
%
Cnd=3*an*alfaA2+2+bn*alfa+cn+(2-m/3);
Cmd=3*am*alfaA2+2*bm*a1fa+cm*(8*m/3-7);
delta=-cm/dm;
% Jacobian matrices coefficients
%
all=~alfan*m*(Cnd*cos(alfan)-(Cn+dn+delta)*sin(alfan)*pi/l80);
a1231;
al3=Kalfan*m*dn*cos(alfan);
a14=0;
a21=Kqn*mA2+Cmd;
a22-0;
a23=Kqn*mA2*dm;
a24=O;
a3 1=0;
a32=0;
a33=0;
a34=1;
a41=0;
a4 2=O ;
a43=-WaA2;
a44=-2 *damp*Wa;
% Controller's design step
%
% The gain K from poles placement
%
k=[-5.7137e+00,-4.5613e-01,-4.0079e-01,-1.1296e-03];
ki=6.3689e+01:
%
%
The gain L from states observer
1=[-7.7941e+02;-7.6420e+04;2.0806e+03;-2.5828e+05];
%0
8 % The gains are changed for the difference constant m as
8 % at m=3; k=[-2.2529e+00,-1.7727e-01,-4.0539e-01,-1.1405e-03]
%%
ki=1.4099e+01
%%
1=[-4.0547e+02,-3.9609e+04I9.1918e+02,-1.l657e+O5]
%%
%%
%%
%%
%%
%
%
at m=4; k=[-1.3009e+00,-9.5867e+02-4.0555e-01,-1.1457e-O3]
ki=5.0734e+00
1=[-2.7506e+02,-2.6813e+04,5.1287e+02,-6.6596e+O4]
Finging the step response for the closed-loop system
aclose=[aa -bb*k bb*ki;l*cc aa-l*cc-bb*k bb*ki;-cc q f 01;
bclose=[q;q; 11 ;
cclose=[cc q' 01;
dclose=O;
t=linspace(0,.5);
[yclose,xclose]=step(acloseIbclosetcclosetdclosetltt);
plot(t,yclose),grid
title(' GRAPH-? Step response for closed-loop system ' )
xlabel('time(sec)'),ylabel('output(y(t))')
pause
%
Finding the frequency response of the open-loop system
8
qqr[q!qlqlql;
aopen=[aa,qq,q;ltcc,aa-l*cc,q;-ccIq'IO];
bopen=[bb;bb;O];
copen=[qt,-k,ki];
dopen-0 ;
[mag,phase,w]=bode(aopenIbopen,copen~dopenll);
semilogx(wt20*log(mag)),grid
title('GRAPH-? Frequency response of the open-loop system')
xlabel('Frequency (rad/sec)');ylabel('Magnitude (dB)');
o PROGRAM
# 4
%
%
%
Design Type 1 servo System (let the plant coefficient used
in the state observer vary with angle of attack and Mach
number)
m= 2
alfa=input('The value of the angle of attack (alfa) = ' )
0 Airframe and actuator constants
%
Kalfa-0.02069;
damp=O .7;
Kq=1.23196;
Wa=150;
Kz=21.4432;
kx=32.1648;
0 Some constants that change from degree to radian
%
alfan=alfa+pi/l80;
%
%
Kalfan= 1.18587;
Kqn=70.586;
Aerodynamic coefficients
an=0.000103;
bn=-0.00945;
arn=0.000215;
bm=-0.0195;
Cn=an*alfaA3+bn+alfa^2+cn*(2-m/3)talfa;
Cm=am+alfaA3+bm+alfa^2+cmt(8*m/3-7)talfa;
%
%
Kzn= 0.6661697;
cn=-0.1696;
cm=O.051;
dn=-0.034;
dm=-0.206;
Some differential values
Cnd=3*an*alfaA2+2+bn+alfa+cn*(2-m/3);
Cmd=3*am*alfaA2+2*bm+alfa+cm+(8fm/3-7);
delta=-cm/dm;
%
%
Jacobian matrices coefficient
all=Kalfan+m*(Cndfcos(alfan)-(Cn+dn*delta)*sin(alfan)*pi/l8O);
a12=1;
al3=Kalfan*m+dn*cos(alfan);
a14=0;
a21=Kqn+mA2*Cmd;
a22=0;
a23=Kqn+mA2*dm;
a24=0;
a3 1-0;
a32=0;
a33=0;
a34=1;
a41=0;
a42=0;
a43=-Waa2;
a44=-2*damp+Wa;
%
%
%
%
Controller's design step
The gain K from poles placement
k=[-5.7137e+00,-4.5613e-01,-4.0079e-01,-1.1296e-03];
ki=6.3689e+Ol;
%
%
The gain L from states observer
1=[-7.7941e+02;-7.6420e+04;2.0806e+03;-2.5828e+05];
%%
8 % The gains are changed for the difference constant m as
8 % at m=3; k=[-2.2529e+00,-1.7727e-01,-4.0539e-01,-1.1405e-03]
%%
ki=1.4099e+01
%%
1=[-4.0547e+02,-3.9609e+04I9.1918e+02,-l.l657e+O5]
%0
% % at m=4; k=[-1.3009e+00,-9.5867e+O2-4.0555e-01,-1.1457e-O3]
%%
ki=5.0734e+00
%%
1=[-2.7506e+02,-2.6813e+O4,5.1287e+O2I-6.6596e+O4]
%%
%
%
Finging the step response for the closed-loop system
aclose=[aa -bb*k bb*ki;l*cc ades-ltcdes-bdes*k bdes*ki;-cc q r 01;
bclose=[q;q;l];
cclose=[cc q' 0];
dclose=O ;
t=linspace(0,.5);
[yclose,xclose]=step(acloseIb~loserccloseldcloserllt);
plot(t,yclose),grid
title(' GRAPH-? Step response for closed-loop system
')
xlabel('time(sec)'),ylabel('output(y(t))')
pause
%
8
Finding the frequency response of the open-loop system
~¶~[SrSrSr¶l;
aopen=[aa,qq,q;l*ccIades-l*~deslq;-~~Iq'rO];
bopen=[bb;bdes;O];
copen=[q',-k,ki];
dopens0;
[mag,phase,w]=bode(aopenIbopen,dopen,l);
sem~logx(w,20*log(mag)),grid
title('GRAPH-? Frequency response of the open-loop system')
xlabel('Frequency (rad/sec)');ylabel('Magnitude (dB)');
% Program # 5
% Scheduling the gains for nonlinear controller
% Gains from the constant operating points
%
kk2=[-5.7137e+00,-4.5613e-01,-4.0079e-01,-1.1296e-03];
ki2=-6.3689e+01;
k12=[-7.7941e+02,-7.6402e+04I2.0806e+03,-2.5828e+05];
kk3=[-2.2529e+00,-1.7727e-01,-4.0539e-01,-1.1405e-03];
ki3=-1.4099e+01;
k13=[-4.0547e+02,-3.9609e+04I9.1918e+02,-1.1657e+05];
kk4=[-1.3009e+00,-9.5867e-02,-4.0555e-01,-1.1457e-03];
ki4=-5.0734e+00;
k14=[-2.7506e+02,-2.6813e+04,5.1287e+02,-6.6596e+04];
kdata=[kk2;kk3;kk4]
ldata=[kl2;kl3;kl4]
kidata=[ ki2, ki3, ki4] .
% Calculate the line equation between two fixed Mach numbers
%
skil=kidata(2)-kidata(1);
bkil=kidata(l)-skil*2;
kil=skil*m+bkil;
skim=kidata(3)-kidata(2);
bkim=kidata( 2 ) -skirn+3;
kim=skim*rn+bkim:
% "scheduling" gains
%
if (m<3),
ki=kil;
k=kl;
1=ll1;
else
ki=kim;
k=h;
1=lmt;
end
%
%
Program # 6
Linearization of the system with nonlinear controller
m=input('The value of m=')
alfa=input('The value of alfa ='I
% Using the gain'Schedulingm
%
scheduling
% Airframe and actuator constants
%
Kalfa=0.02069;
danp=O.7 ;
%
%
Kz=21.4432;
Some constants that change from degree to radian
alfan=alfatpi/180;
%
%
Kq=1.23196;
Wa=150;
Kalfan=1.18587;
Kzrk0.6661697;
Aerodynamic coefficients
an=0.000103;
bn=-0.00945;
cn=-0.1696;
am=O.000215;
bm=-0.0195;
cm=0.051;
~n=an*alfa~3+bn*alfa^2+cnf(2-m/3I*alfa;
~m=am*alfa~3+bm*alfa"2+cm*(8*m/3-7)'alfa;
%
%
Some differential values
Cnd=3*an*alfaA2+2*bn*alfa+cn*(2-m/3);
Cmd=3*am*alfaA2+2*bm'alfa+cm*(8*m/3-7);
delta=-cm/dm;
%
Kqn=70.585;
Jacobion matrices at an equilibrium points
dn=-0.034;
dm=-0.206;
$
Finding the step response of this linearized system
%
t=linspace(0,.6);
[y,x]=step(aln,bln,cln,O , l , t ) ;
plot(t,y),grid
title('GRAPH-? Step Response for the linearized system')
xlabel('time(sec)'),ylabel('output(y(t))')
PROGRAM 1 7
SIMULAB M-file = autopil0t.m
This SIMULAB M-file describes the nonlinear controller
which used gain scheduling technique.
%
%
%
%
%
function (sys,xOl=autopilot(t,x,u,flag)
%
%
%
%
%
Input: (1) u(t) (2) eta (3) M
outputs: (1) delta-c
States: (1) aiphaB (2) qB (3) deltaB (4) delta-dotB ( 5 ) integral
if abs(flag)==l,
%
%The gain
(
k ,ki and 1
)
for gain scheduling
%
kk2=[-5.7137e+00,-4.5613e-01,-4.0079e-01,-1.1296e-031;
k12=[-7.7941e+02,-7.6420e+04,2.0806e+03,-2.5828e+05];
ki2=6.3689e+Ol;
kk3=[-2.2529e+00,-1.7727e-01,-4.0539e-01,-1.1405e-031;
k13=[-4.0547e+02,-3.9609+04,9.1918e+02,-1.1657e+05];
ki3=1.4099e+Ol;
kk4=[-1.3009e+00,-9.5867e-02,-4.0555e-01,-1.1457e-031;
k14=[-2.7506e+02,-2.6813e+04,5.1287e+02,-6.6596e+04];
ki4=5.0734e+00;
kdata=[kk2;kk3;kk4];
ldata= [k12;k13;k141;
kidata=[ki2,ki3,ki4];
%
%
%
Line equation between two constant operating points
skil=kidata(2)-kidata(1);
bkil=kidata(l)-skil*2;
kil=skil*u(3)+bkil;
skim=kidata (3)-kidata (2);
bkim=kidata(2)-skim*3;
kim=skim*u(3) +bkim;
if (u(3)<3),
ki=-kil;
k=kl;
l=1lt;
else
ki=-kim;
k=km;
l=lml;
end
%
%
Airframe and actuator constants
pi=3.14159;
Kalpha=1.18587;
Kc~70.586;
Kz=0.6661697;
Wa=150;
damp=O . 7;
%
% ~erodynamiccoefficient constants
an=.000103;
bn=-.00945;
cn=-.1696;
dn=-. 034;
am=.000215;
bm=-,0195;
cm=.051;
dm=- .206;
%
%
Definitions
M=u(3);
ar=x(l)*(pi/l80);
aar =abs (ar ;
aa=abs (x( 1 ) ) ;
%
%
%
Aerodynamic coefficients (afac and dfac are used for the
perturbation analysis)
afac=l;
df ac=l;
Cn=sign ( ~ ( 1) ) (an*aa^3+bn*aa%cnV2-M/3) *aa)+dn*x(3);
Cm=sign(x(l)) *afac* (am*aaa3+bm*aaA2+cm*
(-7+(813)*M)*aa)+dfac*dm*x(3);
deltac=-k(1)*x(l)-k(2)* ~ ( 2 ) - k ( 3 ) * ~ ( 3 ) - k ( 4 )-ki*.x(S);
*~(4)
%
%
%
Plant state derivatives
sys(l)=(~alpha*~*Cn*cos(aar)+x(2)
) + ( 1 ( 1 ) * ( u ( 2 ) - K z * M A 2 * C )n; )
sys (2)= (~q*M^2*Cm)
+ (1(2)'(~(2) - K z * M W n )) ;
sys(3)=(~(4))+(1(3)*(~(2)-Kz*M^2*Cn));
s y s ( 4 ) = ( - ~ a ~ 2 * x ( 3 ) - ~ 2 * d a m p * W a * x ( 4 ) + W a ^ 2 f d e l t a c ~ + ~ l ~ 4 ~ * ~) ;~ ~ 2 ~ - K z * M ~ 2 *
sys(5)=u(l)-u(2);
%
elseif flag==3
%
%
%
The gain (K,Ki and L) for gain scheduling
kk2=[-5.7137e+00,-4.5613e-01,-4.0079e-01,-1.1296e-03];
k12=[-7.7941e+02,-7.6420e+04,2.0806e+03,-2.5828e+05];
ki2=6.3689e+01;
kk3=[-2.2529e+00,-1.7727e-01,-4.0539e-01,-1.1405e-03];
k13=[-4.0547e+02,-3.9609+04,9.1918e+02,-1.1657e+051;
ki3=1.4099e+01;
kk4=[-1.3009e+00,-9.5867e-02,-4.0555e-01,-1.1457e-03];
k14=[-2.7506e+02,-2.6813e+04,5.1287e+02,-6.6596e+04];
ki4=5.0734e+00;
kdata=[kk2;kk3;kk4];
ldata= [ k12 ;k13 ;k14 I ;
kidata=[ki2,ki3,ki4];
%
%
%
line equation between two constant operating points
skil=kidata(2)-kidata(1);
bkil=kidata(l)-skil*2;
kil=skil*u(3)+bkil;
skim=kidata(3)-kidata(2);
bkim=kidata(2)-skiin*3;
kim=skimtu(3) +bkim;
if ( u ( 3 ) < 3 ) ,
ki=-kil;
k=kl;
1 = l l 1;
else
ki=-kim;
k=km;
l=lm' ;
end
%
%
%
Autopilot outputs
sys ( l ) = - k ( l*)x ( l ) - k ( 2 )* x ( 2 )- k ( 3 ) * ~ ( 3 . ) - k ( 4 ) *-~k(l4t)x ( 5 ) ;
%
elseif flag==O
%
sys=[5;0;1;3;0;0];
x0=[0;0;0;0;01;
else
sys=[l;
%
end
%
%
%
%
%
%
%
%
PROGRAM 11 8
SIMULAB M-file = missi1e.m
This SIMULAB M-file describes the nonlinear missile.
For simulation purposes the Mach number is generated here
though it is not properly part of the missile.
function [sys,xO]=missile(t,x,u,flag)
%
%
%
%
%
Input: (1) delta-c
Outputs: (1) eta (2) M
States: (1) alpha (2) q (3) delta (4) delta-c (5) M
if abs (flag)==l,
%
%
Airframe and actuator constants
pi=3.14159;
Kalpha=1.18587;
Kq=70.586;
Kz=0.6661697;
Wa=150;
damp=O.7;
%
% Aerodynamic coefficient constants
an=.000103;
bn=-.00945;
cn=-.1696;
dn=-.034;
am=.000215;
bm=-.0195;
cm=.051;
dm=-.
206;
%
% Definitions
M=x(5);
ar=x(l) (pi/l80);
aar=abs (ar);
aa=abs ( ~ ( 1) )
;
%
%
%
Aerodynamic coefficients (afac and dfac are used for the
perturbation analysis)
afac=l;
dfac=l ;
Cn=sign(x(l)) * (an*a-bn*aa%cn*
(2-M/3)*aa)+dn*x(3);
'
% plant state derivatives
sys (1)=KalphatM*Cn*cos(aar)+x(2);
SYS (2) =Kq*MA2*Cm;
sys(3)=x(4);
sys ( 4 ) = - ~ a ~ 2 * ~ ( 3 ) - 2 * d a m p * W a * x ( 4 ) + W a * 2 * ~ ( 1 ) ;
%
%
Mach state derivative used for simulation purposes
sys (5)=-0.0207*MA2*abs(Cn)*sin(aar)-0.0062*MA2*cos(aar);
%
%
elseif flag==3
%
% Airframe constant
Kz=0.6661697;
%
% Aerodynamic coefficient constants
an=.000103;
bn=-.00945;
cn=-.1696;
dn=-,034;
%
% Definitions
M=x(5);
aa=abs ( x ( 1 ) ) ;
%
% Aerodynamic coefficient
Cn=sign(x(l))*(an*aaA3+bn*aa^2+cn*(2-M/3)*aa)+~*x(3);
%
% Plant outputs
SYS ( 1 )= K z * M A 2*Cn;
%
% Mach output used
%
sys (2) =M;
%
elseif flag==O
%
sys=[5;0;2;1;0;01;
x0=[0;0;0;0;2.51;
else
sys=[I;
%
end
%
%
for simulation purposes