Induction machine models for efficiency studies in EV design
advertisement

Induction machine models for efficiency studies in
EV design applications
Facundo Aguilera, Pablo M. de la Barrera, Cristian H. De Angelo
Grupo de Electrónica Aplicada (GEA), Fac. de Ingenierı́a, Universidad Nacional de Rı́o Cuarto
Ruta Nac. #36 Km. 601, X5804BYA, Rı́o Cuarto, Argentina. Rı́o Cuarto, Córdoba, Argentina
email: {afacu, pbarrera, cdeangelo}@ieee.org
Abstract—Different induction machine (IM) models are evaluated, with the aim to determine its usefulness in efficiency studies
for electric vehicles (EV) traction drives. In particular, two simple
IM models proposed in the literature, which take into account the
additional losses, are compared. With this aim, model parameters
are adjusted from experimental tests performed on a 4 kW IM.
Then, obtained results from both models at different operating
points are compared. Even when the estimation errors are similar
using both models, one of them is chosen because of its simplicity.
Finally, a simple application of this model is proposed, which
consists in use the model for obtaining a complete efficiency map
of the IM, without need further essays. Such efficiency map can
be used to evaluate the overall efficiency of the traction drive of
an EV or in EV design.
Index Terms—Electric vehicles, models, induction machines,
efficiency map
I. I NTRODUCTION
Efficiency optimization is one of the most important challenges in the design of an electric vehicle (EV) due to its
limited energy storage capacity. In the design stage, it is good
to have an estimation of the power consumption, for which
model based simulations of the EV are usually used [1], [2].
Electric motors are one of the most important components
in the traction system to be taken into account during the study
of power consumption. Induction motors (IM) are usually
used in an electric traction system [3], [4]. The knowledge
of IM efficiency is useful for the design of the remaining
components in traction systems as well as for improving its
control strategies [5], [6].
IM power consumption can be estimated knowing its electric input power and the output power supplied to the mechanical system of the EV. Efficiency maps (EM) (also known as
iso–efficiency contours) are an option to determinate the IM
consumption, in which the torque, speed and efficiency of the
IM are related in the same plot [7].
To obtain EM a large number of experimental tests are
usually performed in order to obtain an interpolation between
different operation points [8]. Another way to obtain the EM
is using a model thus significantly reducing the number of
experimental tests.
Some studies about model–based efficiency assessment of
EV/HEV can be found in the literature [1], [2], [9], [10].
These studies take into account dynamic losses in different
component of the traction drive including the electric motor.
All cited works use the conventional IM model that only
considering I 2 R losses. Although I 2 R losses are the most
important, for a better estimation of efficiency is necessary to
consider all IM losses, which typically includes iron losses
(IL) and stray-load losses (SLL) [11]. In this way, simple IM
models that take SLL into account whose parameters can be
determined by tests have been poor treated in literature [12]–
[14].
Furthermore, if a suitable model is available it is possible to
build a precise EM for the IM. It could be used for energy flow
optimization algorithms in EV/HEV [2], [15], transmission
system design [16] or machine power assessment for a given
driving cycle [7], [17].
Because of the IM is linked to other elements of the EV (e.g.
inverter and transmission system) its model must correctly
represent their input/output variables (stator current, power and
torque). This fact is not considered in other papers [18].
Therefore, in this paper a comparison between IM models available in literature is presented. These models must
consider all IM losses for the estimation of the machine
power consumption in EV/HEV applications. Two models
were selected and analyzed for this purpose. In addition,
the parameter determination methods were also presented.
The estimation error of input/output power, stator current and
torque for different operating points are also analyzed. Finally,
the construction of an EM is presented as an application of
the analyzed models.
The rest of the paper is organized as follows: Section II
presents a description of IM losses. The selection of IM
models is presented in Section III. Parameter estimation based
on standard procedure tests is shown in Section IV. Results
obtained with models and experimentaly are presented in
Section V. Finally, the construction of an EM based on an
IM model is shown and analyzed in Section VI.
II. E FFICIENCY AND LOSSES IN INDUCTION MACHINES
The efficiency of an IM can be expressed as [19]
η=
Pm
Pe − PLT
=
Pe
Pe
(1)
where Pe is the total input power of the machine, Pm is the
output mechanical power in the motor shaft and PLT is the
total loss power. The total loss power can be segregated in the
following components:
Rsl
PLT = PLsir + PLrir + PLh + PLsl + PLm
(2)
where PLsir and PLrir are the I 2 R losses in the stator and
rotor windings, respectively; PLh , PLsl and PLm represent
total core losses, stray load losses (SLL) and windage and
friction losses, respectively. In the following subsections a
brief description of the losses calculation is given.
Rs
jXls
Is
jXlr
Ir
I r2
IF e
Vs
RF e
A. Stator and rotor I 2 R losses
Im
Rr
s
jXm
Stator I 2 R losses can be calculated as
PLsir = 3Rs Is2
(3)
Fig. 1.
where Rs and Is represent the equivalent stator phase resistance and stator phase current (RMS value), respectively.
Rotor I 2 R loss is obtained using the following expression
Rs
IM electrical model M1 proposed in [14].
jXls
jXlr
Rsl
Ir
PLrir = (Pe − PLsir − PLh )s
(4)
where s is the slip.
IF e
Vs
B. Core losses
RF e
Im
jXm
Rr
s
Core losses can be calculated as
Is
PLh = Pe,0 − PLsir − PLm
(5)
where Pe,0 is the no-load power. Core losses can be modeled
as an equivalent resistance in parallel with the magnetizing
branch of the IM [19].
C. Windage and friction losses
These losses are estimated using the curve of the difference
between stator I 2 R losses and no-load losses (Pe,0 − PLsir )
versus voltage. The interception of this curve with the zero
voltage axis corresponds to the windage and friction losses
[19].
D. Stray-load losses
Stray-load losses are related to the machine saliences (stator
and rotor slots, core anisotropies) [20]. These losses are highly
dependent on IM load torque level. In addition, they depend
on the supply frequency and voltage [21], [22].
SLL can be indirectly estimated in the whole operation
range of the IM by the load test: a set of six tests with different
levels of load torque ( 25 %, 50 %, 75 % 100 %, 125 % and
150 %). For each torque level, SLL are obtained as follows
PLsl = PLT − (PLsir + PLrir + PLh + PLm )
(6)
Then, a lineal approximation of the results versus the square
of torque level is obtained [19], [23], as follows
∗
PLsl
= aT 2
where T is the load toque level and a is a constant.
(7)
Fig. 2.
IM electrical model M2 proposed in [12].
III. S ELECTION OF IM MODELS
The IM models presented in this section were selected by
using the following criteria:
1) they must take into account all IM losses;
2) their parameters must be obtained by a reduced number
of tests;
3) they must keep a good estimation of torque and stator
current;
4) they should be usable over an extended speed range;
5) they should be simple in order to be used as a subsystem
in the EV model.
Two models were selected and studied based on previous
criteria. They were described in detail in [12]–[14], [18], [22].
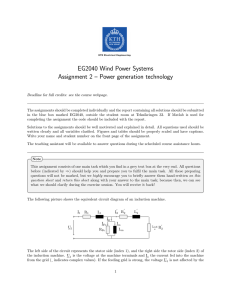
One of them (hereafter called M1) was proposed and
analyzed in [13], [14], [24]. The equivalent electric circuit
is presented in Fig. 1, where V , R and X represent phase
voltages, resistances and reactances, respectively; subscripts s
and r indicate stator and rotor-related variables, respectively;
subscripts l, m, F e and sl indicate leakage, magnetizing, iron
and stray-load related variables, respectively. This equivalent
circuit is based on the standard IM model in steady state with
the addition of the SLL equivalent resistance included in the
rotor branch. SLL are modeled as proposed in [19]: they are
expressed as a function of the square of the load torque and
must be zero in no-load condition. The good estimation of
stator phase current, electromagnetic torque and input/output
power was demonstrated in [13] by using this model.
The other selected model was proposed in [12], hereafter
it is called M2. In this case, SLL equivalent resistance is
included in the stator branch, as shown Fig. 2. This one is
based on the model proposed in [20] where the SLL caused by
air gap spatial harmonics are taken into account. In addition,
an expression for the equivalent SLL resistance is obtained in
this paper. Experimental validation of the model is presented in
[12] and [22] in which the efficiency for different load levels
is only analyzed. Other variables such as stator current and
torque are not verified in the cited papers.
Next sections present the parameter estimation and the
verification of both previous IM models.
3∼
Autotransformer
AC Drive
Voltage and
current sensors
IV. PARAMETER ESTIMATION
The parameters of M1 and M2 were estimated from the
standard test procedures proposed in [19]. By performing
the no-load test at different voltage levels, locked rotor test
and load test, IM losses can be indirectly calculated. Then,
based on these losses, the complete set of parameters can be
obtained.
Mentioned tests were performed using the experimental
setup shown in Fig. 3. This setup consists on a standard
4 kW (5.5 CV) squirrel cage IM (“Tested motor” in the
figure) supplied by an autotransformer for obtaining different
voltage levels. Some rated values of the IM are: line voltage:
380 V, phase current: 9 A, frequency: 50 Hz, 4 poles. This
IM is coupled through a torque sensor to another IM supplied
by a commercial torque-controlled variable speed drive (“AC
Drive”), which acts as a programmable load.
Two phase currents, two line voltage, mechanical speed
and torque were acquired by an oscillographic recorder with
a sampling frequency of 8 (kHz) and 12 bit of resolution.
Finally, these electric signals were processed by a PC.
According to [13], it is necessary readjusting the values
of the rotor parameter originally calculated based on the
mentioned tests for M1. Rr , Llr and Rsl are readjusted in
order to obtain a satisfactory error between variables calculated
with M1 and those measured using the experimental setup.
It is interesting to note that there is not an mathematical
expression for calculating Rsl , therefore it must be empirically
determined.
A mathematical expression for calculating Rsl was proposed
in [12] for model M2. The addition of Rsl in the stator branch
produces not only variation in rotor parameters, as in M1, but
also in parameters of magnetizing and iron branches (Lm and
RF e ). Although, the adjustment of RF e is proposed, other
parameters were not treated in [12].
It is concluded that using the method proposed in [13] and
[12] for adjusting parameters of the models M1 and M2, it is
not possible to obtain satisfactory results for torque, current
and efficiency. It was considered satisfactory results those
whose relative estimation errors were lower than 10 %.
Therefore, in the present paper a nonlinear least–squares
method was used for readjusting the following parameters: Rr ,
Llr , Rsl , Lm and RF e . Variables used for least square method
Tested motor
Load
Torque and
speed sensor
Fig. 3.
Experimental setup.
TABLE I
PARAMETERS OBTAINED BY THE STANDARD PROCEDURE AND BY THE
LEAST– SQUARES METHOD
Parameter
Model M1
Initial Adjusted
Model M2
Initial Adjusted
Rs (Ω)
Xls (Ω)
Rr (mΩ)
Xlr (Ω)
Xm (Ω)
RF e (Ω)
Rsl (mΩ)
1.232
2.392
625.8
2.391
36.36
310.1
-
1.232
2.392
627.7
2.392
36.36
346.4
435.6
1.232
2.392
856.5
3.290
42.14
323.0
897.2
1.232
2.392
866.5
1.196
42.01
340.5
568.7
were: electric and mechanical power (Pe and Pm ), efficiency
(η), torque (Tm ) and stator current (Is ). For improving the
adjusting performance, initial values of the parameters were
used and calculated by the methods proposed in [13] and [12].
Table I shows in the second and fourth column the initial
values of M1 and M2 parameters, in addition, third and fifth
columns show those parameters adjusted using least–squares
method. It can be observed important modifications in some
parameters due to standard procedures do not take into account
the SSLL in the calculation of parameters.
Table II shows average values of relative estimation errors
calculated with the same data set used for adjusting model
parameters. It can be noted that estimation errors are below
the 2.5 %, which it is considered by the authors a satisfactory
estimation.
The analysis performed in this section exposes the need
of new standard procedures to determine the complete set of
parameters of the IM model, that consider all losses, for the
estimation of efficiency, torque and stator current.
TABLE II
AVERAGE VALUES OF RELATIVE ESTIMATION ERRORS .
0.9
M1
Adjustment
M1
M2
ePe
ePm
eη
eTm
eIs
2.029
2.077
0.649
2.077
1.580
%
%
%
%
%
1.987
2.298
0.567
2.298
1.818
Verification
M1
M2
%
%
%
%
%
2.687
2.858
0.461
2.858
0.740
%
%
%
%
%
2.849
2.983
0.137
2.983
0.896
%
%
%
%
%
Efficiency
0.85
0.8
0.75
Model
Standard tests
Additional tests
0.7
0.65
0.01
0.02
0.03
Slip
0.04
0.05
0.03
Slip
0.04
0.05
(a)
V. M ODEL VERIFICATION
0.9
In order to verify the presented models additional data were
experimentally obtained at five different load levels: 40 %,
60 %, 80 % and 110 % of rated torque. Fig. 4 shows results
obtained with M1 and M2 for efficiency versus IM slip (solid
line). In addition, experimental data obtained with standard
tests (“x”) used for the model parameters adjustment and the
new additional data (“*”) were included in the same figure.
Torque and stator current versus slip is presented in Fig.
5 and 6, respectively, expressed in pu (per unit, referred to
the motor nominal values). Maximum values of efficiency are
obtained at s = 0.03, corresponding to 90 % of load torque
and 0.97 pu of stator current. In addition, electric power in
dashed line and mechanical power in solid line are presented
in Fig. 7, where experimental data are included and indicated
in the same way as in previous figures.
For a quantitative analysis of results, the average value of
the relative estimation error for the model verification process
(new additional data) are presented in Table II. It can be
noted that errors smaller than 3 %, which can be considered
a satisfactory estimation, validating the models.
Based on the obtained results, it is possible to conclude
that both models are suitable for the estimation of efficiency
and others IM variables. Nevertheless, in the opinion of the
authors, model M2 has the following advantages over model
M1: there is a procedure for calculating the initial value of Rsl ;
it presents a better representation of the SLL since they can
be easily separated from the iron losses by using the standard
test procedures [12], [25]; it simplifies the SLL study because
they can be estimated from stator currents [22].
0.85
Efficiency maps (also called iso efficiency contours) are
a graphical representation of the efficiency of a machine
as a function of rotor speed and torque. They are usually
represented as 2D iso contours and are very useful in EV/HEV
design applications, such as: full EV efficiency map determination, dimensioning of mechanical transmission [16],
simplification of the output power calculation for use in energy
flow optimization algorithms [2], evaluation of a machine
power consumption given a torque/speed in time specification
[7] and IM selection in function of its best high efficiency
area.
Efficiency
0.8
0.75
0.7
0.65
0.01
0.02
(b)
Fig. 4. Efficiency versus slip using model M1 (a) and using model M2 (b).
1.5
Torque (pu)
M1
1
0.5
0
Model
Standard tests
Additional tests
0.01
0.02
0.03
Slip
0.04
0.05
0.03
Slip
0.04
0.05
(a)
1.5
M2
Torque (pu)
VI. A PPLICATION OF THE MODELS : E FFICIENCY M AP
M2
1
0.5
0
0.01
0.02
(b)
Fig. 5. Electromechanical toque versus slip using model M1 (a) and using
model M2 (b).
0.05
Mechanical and electrical power (pu)
0.05
Mechanical and electrical power (pu)
1.4
Stator current (pu)
M1
1.2
1
0.8
Model
Standard tests
Additional tests
0.01
0.02
0.03
Slip
0.04
2
M1
1.5
Pe
1
Pm
Pm with model
Pe with model
Standard tests
Additional tests
0.5
0
0.01
(a)
Stator current (pu)
M2
1.2
1
0.8
0.02
0.03
Slip
0.04
(b)
0.05
0.04
0.05
2
M2
1.5
Pe
1
Pm
0.5
0
0.01
0.03
Slip
0.02
(b)
Fig. 6. RMS stator current versus slip using model M1 (a) and using model
M2 (b).
Currently, there are discussions of which is the better way
to conform this maps, but normally a set of several tests in
different operating points is used [7]. It should be noted that
the efficiency measurements from this tests depend on the
control algorithm used in the variable speed drive. A model of
the machine with an accurate representation of looses makes
easy to develop an estimation of the efficiency map. Moreover,
different control strategies can be compared without the need
to take the whole set of tests for each one.
The model used for this application has to be valid in a
wide speed range. Currently, there are not proposed models
based on M2 for variable speed but it is known that PLh and
PLsl depends on the electrical frequency [26], [27]. In [14]
a modification of model M1 (Fig. 1) is proposed for variable
speed, i.e. making Rf e and Rsl frequency dependent, but it
was not validated for different frequencies besides the rated
one. In the present work, a similar approach was made for
M2 in order to take into account the frequency dependency of
these losses.
With respect to iron losses, it was proposed that PLh can
be approximated as PLh ∝ f 1.3 , resulting in RF e ∝ ωe0.7
[28]. For stray load losses, an extended study of the frequency
dependence of PLsl was conducted in [27], showing that it
is linearly proportional to supply frequency. Therefore, there
were redefined the parameters Rsl and RF e as
ω 0.7
Rsl (ωe ) = RslN ωωee ; RF e (ωe ) = RF eN ωe0.7
N
0.04
(a)
1.4
0.01
0.03
Slip
0.02
eN
(8)
Fig. 7. Electric and mechanical power versus slip using model M1 (a) and
using model M2 (b).
where ωe is the electrical angular speed, RslN and RF eN are
the SLL and iron losses equivalent resistance, respectively,
calculated from the standard tests at rated frequency.
A recent study shows that Rsl in M2 also depends on supply
voltage [22], but it was not considered in the present work.
Fig. 8 shows the efficiency maps conformed from the IM
model M2 using the above considerations about PLh and PLsl .
This map was obtained using estimated torque and electrical
and mechanical power calculated from the model for different
voltage, frequency and rotor speed. Voltage, frequency and
rotor speed values were selected considering a constant V/F
control strategy.
In order to validate the model with the proposed modification in RF e and Rsl (frequency dependence), additional
experimental tests were performed at half rated frequency. In
Fig. 8 the points obtained at half rated frequency are shown
with “*”, together with the additional data at rated frequency
shown in previous section. As it can be seen, the model has
a good performance at different frequency from that used for
parameter estimation.
Torque versus speed and efficiency versus torque at half
rated frequency are presented in Fig. 9 and 10, respectively.
Solid line indicates results obtained with the model while
experimental results are indicated with “*”. Results shown
in these figures confirm those observed in Fig. 8. As in the
previous section, the good estimation of the variables even at
different frequencies is observed.
1.5
74
70
Torque (p.u.)
60
80
65
78
50
1
76
1030
10 30
0
81
80
74
70
65
60
50
0.5
3010
50
60
65
70
74
76
78
80
78
0.2
Fig. 8.
78
76
74
70
65
60
50
30
81
81
80
70
60
50
40
30
80
7678
74
70
65
60
50
10
10 30
10
0.6
1.2
0.4
0.8
1
1.4
Rotor angular speed (p.u.)
20
10
Iso efficiency contours using model M2.
Torque (pu)
1.5
1
R EFERENCES
0.5
Model
Tests
0
0.44
Fig. 9.
0.46
0.5
0.48
Speed (pu)
0.52
Torque versus speed at half rated frequency using model M2.
Efficiency
0.8
0.6
0.4
0.2
Model
Tests
0
0
0.5
1
1.5
Torque (pu)
Fig. 10.
were selected and compared, M1 and M2. A procedure for
adjusting its parameters from the results obtained in standard
tests was proposed. It was concluded that new analytical
procedures must be investigated for calculating the parameters
of the models when considering the induction machine losses.
From additional tests, both models were validated, concluding that they are suitable for VE/VEH applications, since it is
possible to adjust its parameters using a small number of tests
and obtaining good estimations of power, current and torque.
Because its simplicity and the ease in parameter calculation,
it was preferred the use of the model M2.
Finally, an application of the selected model was presented,
which consists on the construction of an efficiency map of the
induction machine from the model. The obtained efficiency
map was validated using tests at half rated frequency. In
this application, it was concluded that more studies should
be performed on the variation of the model parameters when
using variable speed drives.
Efficiency versus torque at half rated frequency using model M2.
With the proposed modification an efficiency map of an
IM for a desired control strategy can be easily constructed. It
should be noted that only a few tests were accomplished in
order to obtain the parameters, i.e. the IEEE 112 standard set
of tests. The proposed modification of M2 must be considered
as a first attempt in order to get a model usable over an
extended speed range. Further studies should be performed
for a better validation of the model at variable frequency and
an improvement of its accuracy.
VII. CONCLUSION
Induction machine models to be used in VE/VEH efficiency
studies were evaluated. Based on literature, two simple models
[1] M. Amrhein and P. Krein, “Dynamic simulation for analysis of hybrid
electric vehicle system and subsystem interactions, including power
electronics,” Vehicular Technology, IEEE Transactions on, vol. 54, no. 3,
pp. 825–836, 2005.
[2] L. V. Pérez and E. A. Pilotta, “Optimal power split in a hybrid
electric vehicle using direct transcription of an optimal control problem,”
Mathematics and Computers in Simulation, vol. 79, no. 6, pp. 1959–
1970, Feb. 2009.
[3] X. Xue, K. Cheng, and N. Cheung, “Selection of electric motor drives
for electric vehicles,” in Power Engineering Conference, 2008. AUPEC
’08. Australasian Universities, 2008, pp. 1–6.
[4] J. de Santiago, H. Bernhoff, B. Ekergård, S. Eriksson, S. Ferhatovic,
R. Waters, and M. Leijon, “Electrical motor drivelines in commercial
All-Electric vehicles: A review,” Vehicular Technology, IEEE Transactions on, vol. 61, no. 2, pp. 475–484, 2012.
[5] A. Lamine, E. Levi, and A. Cavagnino, “Compensation of stray load
loss induced detuning in rotor flux oriented induction machines,” vol. 2,
sept. 2006, pp. 685–689.
[6] M. Sokola, E. Levi, G. Jamieson, and D. Williams, “Representation and
compensation of iron loss in rotor flux oriented induction machines,” in
Power Electronics, Drives and Energy Systems for Industrial Growth,
1996., Proceedings of the 1996 International Conference on, vol. 1,
1996, pp. 243–249 vol.1.
[7] D. Vanhooydonck, W. Symens, W. Deprez, J. Lemmens, K. Stockman,
and S. Dereyne, “Calculating energy consumption of motor systems
with varying load using iso efficiency contours,” in Electrical Machines
(ICEM), 2010 XIX International Conference on, 2010, pp. 1–6.
[8] W. Deprez, J. Lemmens, D. Vanhooydonck, W. Symens, K. Stockman,
S. Dereyne, and J. Driesen, “Iso efficiency contours as a concept to
characterize variable speed drive efficiency,” in Electrical Machines
(ICEM), 2010 XIX International Conference on, 2010, pp. 1–6.
[9] A. Bazzi and P. Krein, “Comparative evaluation of machines for electric
and hybrid vehicles based on dynamic operation and loss minimization,”
in Energy Conversion Congress and Exposition (ECCE), 2010 IEEE,
2010, pp. 3345–3351.
[10] D. Cundev and P. Mindl, “European driving schedule of hybrid electric
vehicle with electric power splitter and supercapacitor as electric storage
unit,” in Electrical Machines, 2008. ICEM 2008. 18th International
Conference on, 2008, pp. 1–5.
[11] A. De Almeida, F. Ferreira, and J. Fong, “Standards for efficiency of
electric motors,” Industry Applications Magazine, IEEE, vol. 17, no. 1,
pp. 12–19, 2011.
[12] A. Boglietti, A. Cavagnino, L. Ferraris, and M. Lazzari, “Induction
motor equivalent circuit including the stray load losses in the machine
power balance,” Energy Conversion, IEEE Transactions on, vol. 23,
no. 3, pp. 796–803, 2008.
[13] E. Levi, A. Lamine, and A. Cavagnino, “Impact of stray load losses on
vector control accuracy in current-fed induction motor drives,” Energy
Conversion, IEEE Transactions on, vol. 21, no. 2, pp. 442–450, 2006.
[14] A. Lamine and E. Levi, “Dynamic induction machine modelling considering the stray load losses,” in Universities Power Engineering
Conference, 2004. UPEC 2004. 39th International, vol. 2, 2004, pp.
582–586 vol. 1.
[15] L. Perez, G. Bossio, D. Moitre, and G. Garcia, “Optimization of power
management in an hybrid electric vehicle using dynamic programming,”
Mathematics and Computers in Simulation, vol. 73, no. 1-4, pp. 244–
254, Nov. 2006.
[16] W. Wei, W. Qingnian, Y. Yuanbin, Z. Xiaohua, and Z. Naiwei, “Study on
the operation region of induction traction motor for electric vehicle,” in
Measuring Technology and Mechatronics Automation, 2009. ICMTMA
’09. International Conference on, vol. 2, 2009, pp. 699–703.
[17] S. Williamson, M. Lukic, and A. Emadi, “Comprehensive drive train
efficiency analysis of hybrid electric and fuel cell vehicles based on
motor-controller efficiency modeling,” Power Electronics, IEEE Transactions on, vol. 21, no. 3, pp. 730–740, 2006.
[18] C. Shumei, L. Chen, and S. liwei, “Study on efficiency calculation
model of induction motors for electric vehicles,” in Vehicle Power and
Propulsion Conference, 2008. VPPC ’08. IEEE, 2008, pp. 1–5.
[19] “IEEE standard test procedure for polyphase induction motors and
generators,” 2004.
[20] P. Alger, Induction machines : their behavior and uses, ed.2, rev. &
updated. ed. New York: Gordon & Breach, 1970.
[21] N. Glew, “Stray load losses in induction motors: a challenge to
academia,” Power Engineering Journal, vol. 12, no. 1, pp. 27–32, 1998.
[22] A. Boglietti, A. Cavagnino, L. Ferraris, and M. Lazzari, “Impact of the
supply voltage on the Stray-Load losses in induction motors,” Industry
Applications, IEEE Transactions on, vol. 46, no. 4, pp. 1374–1380, 2010.
[23] A. Boglietti, A. Cavagnino, M. Lazzari, and M. Pastorelli, “International standards for the induction motor efficiency evaluation: a critical
analysis of the stray-load loss determination,” in Industry Applications
Conference, 2003. 38th IAS Annual Meeting. Conference Record of the,
vol. 2, 2003, pp. 841–848 vol.2.
[24] E. Levi, A. Lamine, and A. Cavagnino, “Detuned operation of vector
controlled induction machines due to stray load losses,” in Industry Applications Conference, 2005. Fourtieth IAS Annual Meeting. Conference
Record of the 2005, vol. 1, 2005, pp. 500–507 Vol. 1.
[25] K. Yamazaki and Y. Watanabe, “Stray load loss analysis of cage
induction motors considering inter-bar currents using 3-D finite element
method,” in Electric Machines and Drives, 2005 IEEE International
Conference on, 2005, pp. 585–590.
[26] E. Levi, “Impact of iron loss on behavior of vector controlled induction
machines,” Industry Applications, IEEE Transactions on, vol. 31, no. 6,
pp. 1287–1296, 1995.
[27] A. Wallace, A. von Jouanne, and A. Nagornyy, “Evaluation of stray load
losses in induction motors at different supply frequencies,” in Industry
Applications Conference, 2002. 37th IAS Annual Meeting. Conference
Record of the, vol. 4, 2002, pp. 2296–2300 vol.4.
[28] L. Youjie, “Asynchronous motor’s Maximum-Efficiency control considering variable iron loss equivalent resistance by adjusting the ratio of
active power to reactive power,” in Electrical and Control Engineering
(ICECE), 2010 International Conference on, 2010, pp. 3396–3399.