V - PowerWorld
advertisement

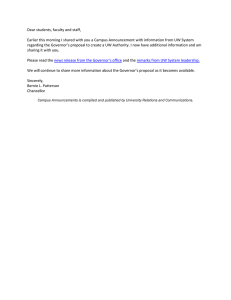
Exciter AC7B and ESAC7B Exciter AC7B and ESAC7B
IEEE 421.5 2005 Type AC7B Excitation System Model
V UEL
VR EF
EC
1
1 + sTR
+ +
2
VC
VS
−
Σ
+
KPR +
−
VAMAX
VRM AX
KIR sKDR
+
s 1+ sTDR
VR M IN
3
4
+
Σ
KPA +
−
KIA VA
s 5
VFEMAX -K D I FD
K E +S E (VE )
K P VT
+
π
Σ
−
-K L VFE
VAM IN
Σ
+
1
sTE
VEM IN
KF 2
VX = VE SE (VE )
+
6
VE 1
Spdmlt
0
π
VFE
FEX
FEX = f ( IN )
+
+
Σ
+
KE
KD
States
KF1
3 - K IR
4 - K DR
5 - VA
6 - Feedback
AC7B supported by PSSE
ESAC7B supported by PSLF with optional speed multiplier
E FD
IN
+
2 - Sensed Vt
1
VX
sKF3
1+ sTF
Σ
1 - VE
Speed
IN =
KC IFD
VE
I FD
Exciter AC8B Exciter AC8B
IEEE 421.5 2005 AC8B Excitation System
VREF
VCOMP
1
1 + sTR
2
−
+
Σ
+
VS
+
Σ
+
VUEL
VRMAX
VPIDMAX
+
VOEL
K
sKDR
KPR + IR +
s 1+ sTDR
VPIDMIN
3
VFEMAX -K D I FD
K E +S E (VE )
4
KA
1 + sTA
5
1
sTE
VΣ
+
R
1
π
−
VRMIN
VEM IN
VFE
E FD
FEX
FEX = f ( I N )
IN
Σ
+
K E + S E (VE )
+
KD
States
1 - VE
2 - Sensed Vt
3 - PID 1
4 - PID 2
5 - VR
Model supported by PSSE
IN =
K C I FD
VE
I FD
Exciter BPA_EA Exciter BPA_EA
Continuously Acting DC Rotating Excitation System Model
Regulator
VST B
Filter
VT
1
1 + sTR
+
2
−
Σ
+
VRM AX
+
KA
1+ sTA
Σ
−
3
1
1+ sTA1
VRM IN
VREF
5
Stabilizer
sKF
1+ sTF
States
1 - E FD
2 - Sensed Vt
3 - VR
4 - VR1
5 - VF
Model in the public domain, available from BPA
4 +
Exciter
Σ
−
1
sTE
SE + KE
E FD
1
Exciter BPA EB Exciter BPA EB
Westinghouse Pre-1967 Brushless Excitation System Model
Exciter
Regulator
VST B
VT
Filter
1
1 + sTR
2
+
−
+
Σ
VRM AX
+
Σ
−
3
KA
1+ sTA
1
1+ sTA1
VRM IN
Stabilizer
VREF
5
sKF
1+ sTF
States
1 - E FD before limit
2 - Sensed Vt
3 - VR
4 - VR1
5 - VF
6 - VF1
Model in the public domain, available from BPA
6
1
1+ sTF1
4 +
E FD M AX
Σ
−
1
sTE
SE + KE
1
E FD
E FD M IN = 0
Exciter BPA EC Exciter BPA EC
Westinghouse Brushless Since 1966 Excitation System Model
Regulator
VST B
VRM AX
+
VT
Exciter
−
+
Σ
+
Σ
KA
1+ sTA
−
2
3
1
1+ sTA1
VRM IN
VREF
4
Stabilizer
sKF
1+ sTF
States
1 - E FD before limit
2 - VR
3 - VR1
4 - VF
Model in the public domain, available from BPA
E FD M AX
+
Σ
−
1
sTE
SE + KE
SE + KE
1
E FD
E FD M IN = 0
Exciter BPA ED Exciter BPA ED
SCPT Excitation System Model
Regulator
VR EF
VT'
1
1 + sTR
−
+
VBM AX
VRM AX
+
2
Exciter
Σ
+
Σ
−
KA
1+ sTA
4 +
1
1+ sTA1 VR
3
VB
Σ
+
VRM IN
+
Σ
−
0
KE
VS
5
VT
IT
⎛ 0.78 ⋅ I FD ⎞
A=⎜
⎟
⎝ VTH EV ⎠
If A > 1, V B = 0
2
VTHEV = KPVT + jKI IT
IFD
States
1 - EField
2 - Sensed Vt
3 - VA
4 - VR
5 - Feedback
Model in the public domain, available from BPA
1
sTE
VTH EV
1− A
π
sK F
1 + sTF
Stabilizer
1
E FD
Exciter BPA EE Exciter BPA EE
Non-Continuously Active Rheostatic Excitation System Model
Exciter
Regulator
VRM AX
VT'
−
Σ
KA'
1+ sTRH
+
+
VREF
VRM IN
VT'
∗
E FD M AX
If:
VRH
2
ΔVT ≥ KV , VR = VRMAX
ΔVT < KV , VR = VRH
ΔVT ≤ −KV , VR = VRMIN
VR
+
Σ
−
1
sTE
1
SE + KE
−
Σ
Δ VT
+
VT' O
States
1 - EField before limit
2 - VRH
Model in the public domain, available from BPA
* NOTE:
If the time constant TRH is equal to
zero, this block is represented as K 'A /s
E FD
E FD M IN
Exciter BPA EF Exciter BPA EF
Westinghouse Continuous Acting Brushless Rotating Alternator
Excitation System Model
Regulator
VSO
VRM AX
+
VT
( TR = 0 )
Exciter
−
+
Σ
+
Σ
KA (1+ sTA )
s
−
E FD M AX
2 +
VRM IN
VREF
3
Stabilizer
sKF
1+ sTF
States
1 - EField before limit
2 - VR
3 - VF
Model in the public domain, available from BPA
Σ
−
1
sTE
SE + KE
SE + KE
1
E FD
E FD M IN = 0
Exciter BPA EG Exciter BPA EG
SCR Equivalent Excitation System Model
Regulator
VR EF
VRM AX
+
VT
−
+
Σ
+
Σ
−
KA
1+ sTA
2
1
1+ sTA1 VR
VRM IN
VSO
3
sK F
1 + sTF
Stabilizer
States
1 - EField
2 - VA
3 - VF
Model in the public domain, available from BPA
1
E FD
Exciter BPA EJ Exciter BPA EJ
Westinghouse Static Grand Couple PP#3 Excitation System Model
Regulator
VSO
VT'
Filter
1
1+ sTR
VRM AX
+
2
−
+
Σ
+
Σ
KA
1+ sTA
−
4
1 - EField before limit
2 - Sensed Vt
3 - VR
4 - VF
Model in the public domain, available from BPA
1
1+ sTA1
VRM IN
VREF
States
3
Stabilizer
sKF
1+ sTF
E FD M AX
1
π
E FD M IN
E FD
Exciter BPA EK Exciter BPA EK
General Electric Alterrex Excitation System Model
Regulator
VSO
VRM AX
+
VT
(TR =0)
Exciter
−
+
Σ
+
Σ
−
KA
1+ sTA
2
1
1+ sTA1
VRM IN
VREF
4
States
1 - EField before limit
2 - VR
3 - VR1
4 - VF
Model in the public domain, available from BPA
Stabilizer
sKF
1+ sTF
3 +
E FD M AX
Σ
−
1
sTE
SE + KE
1
E FD
E FD M IN = 0
Exciter BPA FA Exciter BPA FA
WSCC Type A (DC1) Excitation System Model
VREF
VT
IT
VC = VT + (RC + jXC )IT
VC
1
1 + sTR
2
−
+
Σ
VS
VERR
+
+
VF
Σ
−
VRM AX
1+ sTC
1+ sTB
3
KA
1+ sTA
1 - EField
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model in the public domain, available from BPA
4
Σ
−
VFE
VRM IN
5
States
VR +
sK F
1 + sTF
1
sTE
SE + KE
E FD
1
Exciter BPA FB Exciter BPA FB
WSCC Type B (DC2) Excitation System Model
VREF
VT
IT
VC = VT + (RC + jXC )IT
VC
1
1 + sTR
2
−
+
Σ
VS
VERR
+
+
VF
Σ
−
VT VRM AX
1+ sTC
1+ sTB
3
KA
1+ sTA
1 - EField
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model in the public domain, available from BPA
4
Σ
−
VFE
VT VRMIN
5
States
VR +
sK F
1 + sTF
1
sTE
SE + KE
E FD
1
Exciter BPA FC Exciter BPA FC
WSCC Type C (AC1) Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
2
−
+
Σ
VERR
VRM AX
VS
+
+
Σ
−
1+ sTC
1+ sTB
4
VF
3
VR
+
1
sTE
Σ
−
sKF
1+ sTF
1
VE
E FD
π
FEX
0
VRMIN
5
States
1 - VE
KA
1+ sTA
FEX = f ( IN )
VFE
IN
Σ
+
+
KE
IN =
KC IFD
VE
2 - Sensed Vt
3 - VR
4 - VLL
5 - VF
Model in the public domain, available from BPA
KD
I FD
Exciter BPA FD Exciter BPA FD
WSCC Type D (ST2) Excitation System Model
VREF
VT
VC
VC = VT + (RC + jXC )IT
IT
2
−
1
1 + sTR
+
Σ
VERR
VRMAX
+
Σ
+
VS
3
KA
1+ sTA
−
EFDMAX
VR
VRMIN
VF
+
Σ
+
VB
+
1
sTE
Σ
−
1
E FD
0
KE
4
VT
VE = KPVT + jKI IT
IT
VE
sK F
1 + sTF
If K P = 0. and K I = 0., VB = 1.
π
States
IFD
KI
IN = C FD
VE
1 - EField
IN
FEX = f ( IN )
Model in the public domain, available from BPA
FEX
2 - Sensed Vt
3 - VR
4 - VF
Exciter BPA FE Exciter BPA FE
WSCC Type E (DC3) Excitation System Model
VREF
VT
IT
VC = VT + (RC + jXC )IT
VC
2
1
1 + sTR
+
−
Σ
VRM AX
KV
VRMAX − VRMIN
sKV TRH
VERR
−K V
VRH 3
VRMIN
If VERR ≥ KV , VR = VRMAX
If VERR < KV , VR = VRH
States
If VERR ≤ −KV , VR = VRMIN
1 - EField before limit
2 - Sensed Vt
3 - VRH
Model in the public domain, available from BPA
+
VR
Σ
−
1
sTE
VFE
KE + SE
1
E FD
Exciter BPA FF Exciter BPA FF
WSCC Type F (AC2) Excitation System Model
VREF
VT
VC = VT + (RC + jXC )IT
IT
VC
1
1 + sTR
2
−
+
Σ
VERR
VAMAX
VS
+
+
Σ
−
VF
4
1+ sTC
1+ sTB
VRM AX
3
KA
1+ sTA
VAMIN
+
Σ
−
VA
LV
Gate
VL
VH
+
KB
VRM IN
KL
VR
Σ
1
sTE
Σ
−
−
1
VE
π
FEX
0
+
FEX = f ( IN )
VLR
KH
5
States
1 - VE
sKF
1+ sTF
2 - Sensed Vt
IN
VFE
Σ
+
KE + SE
+
3 - VA
4 - VLL
5 - VF
Model in the public domain, available from BPA
E FD
KD
IN =
KC IFD
VE
I FD
Exciter BPA FG Exciter BPA FG
WSCC Type G (AC4) Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
2
−
+
Σ
VERR
VIM AX
+
Σ
+
VS
States
1 - EField before limit
2 - Sensed Vt
3 - VLL
Model in the public domain, available from BPA
VIM IM
1+ sTC
1+ sTB
(VRM AX − K C I FD )
3
KA
1+ sTA
1
(VRM IN
E FD
− K C I FD )
Exciter BPA FH Exciter BPA FH
WSCC Type H (AC3) Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
2
−
+
Σ
VERR
Σ
KLV
+
VAMAX
VS
+
+
1+ sTC
1+ sTB
Σ
−
4
KA
1+ sTA
HV
Gate
3
VA
VLV
π
VR
1
sTE
Σ
−
VN
s
1+ sTF
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model in the public domain, available from BPA
VE 1
π
FEX = f ( IN )
VFE
IN
KN
Σ
KF
EFD
E FDN
E FD
FEX
0
KR
5
+
VAMIN
VF
−
+
KE + SE
+
KD
IN =
KC IFD
VE
I FD
Exciter BPA FH Exciter BPA FH
WSCC Type H Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
2
−
+
Σ
VERR
VAMAX
VS
+
+
1+ sTC
1+ sTB
Σ
−
4
KA
1+ sTA
3
VA
π
VR
1
sTE
Σ
−
VAMIN
VF
VEMIN
KR
5
+
VN
s
1+ sTF
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model in the public domain, available from BPA
VE 1
π
FEX
FEX = f ( IN )
VFE
IN
KN
Σ
KF
EFD
E FDN
E FD
+
KE + SE
+
KD
IN =
KC IFD
VE
I FD
Exciter BPA FJ Exciter BPA FJ
WSCC Type J Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
2
+
Σ
−
VERR
+
VS
VRM AX
Σ
+ −
1+ sTC
1+ sTB
4
1 - EField before limit
2 - Sensed Vt
3 - VLL
4 - VF
Model in the public domain, available from BPA
KA
1+ sTA
VRM IN
VF
States
3
sKF
1+ sTF
1
(VT E FDM AX − K C I FD )
(VT E FDM IN
E FD
− K C I FD )
Exciter BPA FK Exciter BPA FK
WSCC Type K (ST1) Excitation System Model
VREF
VT
IT
VC
VC = VT + (RC + jXC )IT
1
1 + sTR
+
2
−
Σ
VERR
VIM AX
+
Σ
+ −
VS
1+ sTC
1+ sTB
VIM IM
4
1 - EField before limit
2 - Sensed Vt
3 - VLL
4 - VF
Model in the public domain, available from BPA
KA
1+ sTA
1
(VT VRM IN
VF
States
3
(VT VRM AX − K C I FD )
sKF
1+ sTF
E FD
− K C I FD )
Exciter BPA FL Exciter BPA FL
WSCC Type L (ST3) Excitation System Model
VREF
VT
IT
VC = VT + (RC + jXC )IT
VC
1
1 + sTR
2
−
+
Σ
VGMAX
VERR
KG
VS
VIM AX
+
+
VG
Σ
VRM AX
E FDMAX
−
KJ
+
1+ sTC
1+ sTB
3
+
VA
VIM IN
1
KA
1+ sTA
Σ
π
VR
VB
VRMIN
VREF
VT
IT
VE = K PVT + j ( KI + KP XL ) IT
IFD
States
1 - VM
2 - Sensed Vt
3 - VLL
Model in the public domain, available from BPA
KI
IN = C FD
VE
IN
E FD
VE
π
FEX = f ( IN )
K P = KPe jθ p
FEX
Exciter BPA FM through BPA FV Exciter BPA FM through BPA FV
No block diagrams have been created
Exciter DC4B Exciter DC4B
IEEE 421.5 2005 DC4B Excitation System Model
V
V
O EL
(O EL=1)
O EL
(O EL=2)
Alternate OEL Inputs
VUEL
VUEL
(UEL=1)
Alternate UEL Inputs
Speed
(UEL=2)
VT
VREF
VRMAX K A
EC
1
1 + sTR
2 +
−
VS
+
−
Σ
+
−
VF
HV
Gate
K
sKD
KP + I +
s 1+ sTD
3
LV
Gate
π
VT VRM AX
KA
1+ sTA
VR
+
1
5
1
sTE
Σ
−
VEMIN
VT VRMIN
4
VRMIN K A
Σ
+
VX = VE SE (VE )
+
KE
States
1 - E FD
2 - Sensed Vt
6
3 - PID1
4 - PID2
5 - VR
6 - Feedback
Model supported by PSSE
Model supported by PSLF with optional speed multiplier
sKF
1+ sTF
1
0 Spdmlt
π
E FD
Exciter ESAC1A Exciter ESAC1A
IEEE Type AC1A Excitation System Model
V UEL
VS
EC
1
1 + sTR
2
VAMAX
+
Σ
+
−
1+ sTC
1+ sTB
KA
1+ sTA
3
HV
Gate
+
LV
Gate
VR
VRM IN
VAMIN
VF
1
VRM AX
4
−
VREF
Speed
1
sTE
Σ
−
sKF
1+ sTF
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF with optional speed multiplier
VE
π
VX = VE SE (VE )
VFE
Σ
+
E FD
FEX
0
VO EL
5
1
Spdmlt
0
FEX = f ( IN )
VX
+
Σ
+
KE
+
KD
IN =
KC IFD
VE
I FD
Exciter ESAC2A Exciter ESAC2A
IEEE Type AC2A Excitation System Model
EC
VREF
VS
+ +
1
−
1+sTR 2 Σ
−
VF
VAMAX
VO EL
VU EL
VRMAX
4
1+sTC
1+sTB
KA + 3
1+sTA V
A
VAMIN
Σ
HV
Gate
KB
−
VFEMAX -K D I FD
K E +S E (VE )
LV
Gate
1
sTE
+
Σ
VR −
KH
5
sK F
1+sTF
+ VX
Σ
+
3 - VA
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF with optional speed multiplier
+
VFE
Spdmlt
0
VE
π
E FD
FEX
KE
Σ
2 - Sensed Vt
1
VX =VE SE (VE )
+
States
1 - VE
1
0
VRMIN
VH
Speed
KD
FEX =f(I N )
IN
IN =
K C I FD
VE
I FD
Exciter ESAC3A Exciter ESAC3A
IEEE Type AC3A Excitation System Model
KR
VUEL
VR EF
EC
2
1
VC
−
1 + sTR
+
Σ
+
VS
VFEMAX -K D I FD
K E +S E (VE )
VAMAX
1+ sTC
1+ sTB
4
HV
Gate
+
Σ
−
3
+
KA
π
VR Σ
1+ sTA VA
1
sTE
−
VAMIN
VX = VE SE (VE )
VX
Σ
+
States
1 - VE
5
s
1+ sTF
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF with optional speed multiplier
VN
VN
Spdmlt
0
Σ
E FD
π
FEX = f ( IN )
IN
+
+
KE
KD
2 - Sensed Vt
3 - VA
+
VE
1
FEX
VEMIN
VFE
VF
1
Speed
KN
KF
EFD
IN =
KC IFD
VE
I FD
Exciter ESAC4A Exciter ESAC4A
IEEE Type AC4A Excitation System Model
VUEL
VR EF
EC
1
1 + sTR
2
−
+
Σ
+
VS
States
1 - EField before limit
2 - Sensed Vt
3 - VLL
Model supported by PSLF and PSSE
PSSE uses nonwindup limit on E FD
VRMAX -K C I IFD
VIM AX
VI
VIM IN
1+ sTC
1+ sTB
3
HV
Gate
KA
1+ sTA
1
VRMIN
E FD
Exciter ESAC5A Exciter ESAC5A
IEEE Type AC5A Excitation System Model
EC
VR EF
1
1 + sTR
2
−
+
VRMAX
+
KA
1+ sTA
Σ
−
3
+
Σ
−
0
VRMIN
VS
4
5
sKF (1+ sTF3 )
(1+ sTF1 )(1+ sTF 2 )
If TF2 =0, then sTF3 =0.
States
1 - EField
2 - Sensed Vt
3 - VR
4 - Feedback 1
5 - Feedback 2
Model supported by PSLF and PSSE
1
1
sTE
VX = VE ⋅ S E (VE )
VX
+
Σ
+
KE
E FD
Exciter ESAC6A Exciter ESAC6A
IEEE Type AC6A Excitation System Model
Speed
VUEL
VR EF
EC
+ +
1
1 + sTR
2
VC
−
Σ
+
VAMAX
KA (1+ sTK )
1+ sTA
3
1+ sTC
1+ sTB
4 +
VA
VAMIN
VS
5
1+ sTJ
1+ sTH
1
VT VRM AX
+
Σ
−
VR
1
sTE
Σ
−
VT VRM IN
1
FEX
VX = VE SE (VE )
VH
0
−
Σ
VFELIM
VFE
Σ
+
IN
+
Σ
+
KE
+
States
1 - VE
2 - Sensed Vt
3 - TA Block
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF with optional speed multiplier
FEX = f ( IN )
VX
+
E FD
π
0
VHMAX
KH
VE
Spdmlt
0
KD
IN =
KC IFD
VE
I FD
Exciter ESAC8B_GE Exciter ESAC8B_GE
IEEE Type AC8B with Added Speed Multiplier.
VREF
K PR
VRMAX
VCOMP
1
1 + sTR
2
−
+
Σ
+
VFEMAX -K D I FD
K E +S E (VE )
+
K IR
s
3
+
Σ
KA
1 + sTA
+
5
1
sTE
VΣ
+
R
sK DR
1 + sTDR
4
1
Spdmlt
0
π
−
VRMIN
VS
1
Speed
VEM IN
VFE
E FD
FEX
FEX = f ( I N )
IN
Σ
+
K E + S E (VE )
+
KD
States
1 - VE
2 - Sensed Vt
3 - PID 1
4 - PID 2
5 - VR
Model supported by PSLF
If VTMULT <> 0, VRMAX = VT VRMAX and VRMIN = VT VRMIN
IN =
K C I FD
VE
I FD
Exciter ESAC8B_PTI Exciter ESAC8B_PTI
Basler DECS Model
VR EF
VC
1
1 + sTR
2
−
K PR
VRMAX
+
+
Σ
K IR
s
4
+
+
VS
Σ
+
KA
1+ sTA
5
+
VR
1
sTE
Σ
−
0
VRMIN
sK DR
1 + sTD
3
VX = EFD⋅ SE ( EFD)
VX
+
Σ
States
1 - E FD
2 - Sensed Vt
3 - Derivative Controller
4 - Integral Controller
5 - VR
Model supported by PSSE
+
KE
1
E FD
Exciter ESDC1A Exciter ESDC1A
IEEE Type DC1A Excitation System Model
VR EF
EC
2
1
1 + sTR VC −
+
VS
+
Σ
−
VRMAX
VUEL
1+ sTC
1+ sTB
5
KA
1+ sTA
HV
Gate
3 +
VR
1
sTE
Σ
−
E FD
0
VRMIN
VFE
VF
1
VX = EFD⋅ SE ( EFD)
VX +
Σ
4
+
KE
sK F
1 + sTF 1
States
1 - E FD
2 - Sensed Vt
3 - VR
4 - VF
5 - Lead-Lag
Model supported by PSSE
Model supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in the Simulator implementation
Exciter ESDC2A Exciter ESDC2A
IEEE Type DC2A Excitation System Model
VR EF
EC
1
1 + sTR
+
2
VC −
Σ
+
−
VT VRMAX
VUEL
1+ sTC
1+ sTB
5
KA
1+ sTA
HV
Gate
3 +
VR
1
sTE
Σ
−
VT VRMIN
VS
VF
VFE
VX = EFD⋅ SE ( EFD)
VX
+
Σ
4
+
KE
sK F
1 + sTF 1
States
1 - E FD
2 - Sensed Vt
3 - VR
4 - VF
5 - Lead-Lag
Model supported by PSSE
Model supported by PSLF includes spdmlt, exclim, and UEL inputs that are read but not utilized in Simulator
1
E FD
Exciter ESDC3A Exciter ESDC3A
IEEE Type DC3A with Added Speed Multiplier
VREF
VC
1
1 + sTR
1 +
−
Σ
VERR
VRMAX
KV
−K V
VRMAX − VRMIN
sKV TRH
VRMIN
3
If VERR ≥ KV , VR = VRMAX
If VERR ≤ −KV , VR = VRMIN
Else VR = VRH
VX
VRH
VX = EFD⋅ SE ( EFD)
Speed
1
−
VR
+
Σ
1
KE + sTE
2
If exclim <> 0 then 0 else unlimited
States
1 - EField
2 - Sensed Vt
3 - VRH
Model supported by PSLF
Spdmlt
0
π
E FD
Exciter ESST1A Exciter ESST1A
IEEE Type ST1A Excitation System Model
V
V
U EL
(U EL=1)
U EL
(UEL=3)
Alternate
UEL Inputs
V
V
S
(V O S=1)
Alternate
Stabilizer
Inputs
V
U EL
(U EL=2)
EC
1
1 + sTR
2
−
+
VIM AX
+
+
Σ
−
VI
VIM IN
S
(VO S=2)
HV
Gate
VAMAX
(1+ sTC )(1+ sTC1 )
(1+ sTB )(1+ sTB1 )
3
4
VREF
KA
1+ sTA
1
+
VA
VT VRMAX -K C I FD
+
HV
Gate
Σ
VT VRM IN
VAMIN
VO EL
KLR
0
1 - VA
2 - Sensed Vt
3 - LL
4 - LL1
5 - Feedback
Model supported by PSLF and PSSE
E FD
−
VF
States
LV
Gate
5
sKF
1+ sTF
Σ
I FD
−
I LR
+
Exciter ESST2A Exciter ESST2A
IEEE Type ST2A Excitation System Model
VUEL
VR EF
EC
1
1 + sTR
+
2
VC −
Σ
+
VS
−
VRMAX
1+ sTC
1+ sTB
KA
1+ sTA
HV
Gate
VRMIN
VF
EFDMAX
3
VR
π
+
1
sTE
Σ
−
VB
0
KE
4
VT
VE = KPVT + jKI IT
IT
IFD
IN =
KC IFD
VE
IN
VE
sK F
1 + sTF
If K P = 0 and K I = 0, VB = 1
π
FEX = f ( IN )
FEX
States
1 - E FD
2 - Sensed Vt
3 - VR
4 - VF
Model supported by PSSE
Model supported by PSLF includes UEL input that is read but not utilized in Simulator
1
E FD
Exciter ESST3A Exciter ESST3A
IEEE Type ST3A Excitation System Model
VGMAX
VS
EC
1
1 + sTR
VUEL
Σ
+
VG
VRMAX
VIM AX
+
2 −
KG
VMMAX
−
HV
Gate
VI
1+ sTC
1+ sTB
VIM IN
4
3 +
KA
1+ sTA
VA
VR
KM
1+ sTM
Σ
VMMIN
VRMIN
VREF
VT
IT
VE = K PVT + j ( KI + KP XL ) IT
K P = KPe jθP
IFD
States
1 - VM
2 - Sensed Vt
3 - VR
4 - LL
Model supported by PSLF and PSSE
IN =
KC IFD
VE
IN
VE
VM
VBMAX
π
FEX = f ( IN )
1
FEX
π
VB
E FD
Exciter ESST4B Exciter ESST4B
IEEE Type ST4B Potential- or Compound-Source Controlled-Rectifier Exciter Model
VCO M P
1
1 + sTR
VRMAX
+
2 −
VMMAX
+
Σ
+
VREF
KG
VS
VUEL
K
KPR + IR
s
4
VR
1
1+ sTA
−
3 +
Σ
KPM +
1
KIM
s
VMMIN
VRMIN
VT
IT
VE
VE = KPVT + j ( KI + KP XL ) IT
K P = KPe jθP
IFD
IN =
KC IFD
VE
VO EL
IN
π
FEX = f ( IN )
States
1 - VM
2 - Sensed Vt
3 - VA
4 - VR
Model supported by PSSE
Model supported by PSLF includes VGMAX input that is read but not utilized in Simulator
LV
Gate
VBMAX
FEX
π
VB
E FD
Exciter EWTGFC Exciter EWTGFC
Excitation Control Model for Full Converter GE Wind-Turbine Generators
Reactive Pow er Control M odel
VRFQ
VC
4
1
1 + sTR
−
+
1
1+ sTP
7
Q M AX
+
1
1+ sTFV
∑
3 +
KPV
1+ sTV
6
Q M IN
Q REF
tan
PFAREF
Pelec
1
fN
∑
5
KIV
s
π
0
1
pfaflg
Q REF
1
0
−
+
−1
varflg
VMAX
Q M AX Q gen
1
K QI
∑
I QM AX
VREF
s
Q M IN
+
−
KVI
s
∑
VT ER M
VMIN
2 - E qppcmd
Converter Current Limit
÷
PORD
I PM AX
I PCMD
3 - K PV
4 - VregMeas
5 - K IV
6 - QORD
7 - PMeas
Model supported by PSLF
+
Pelec
−
∑
1
VT ER M
+
−
2
I QMIN
pqflag
States
1 - Vref
IQCMD
∑
Pdbr
0
K dbr
0
−
∑
+
E BST
1
s
Exciter EX2000 Exciter EX2000
IEEE Type AC7B Alternator-Rectifier Excitation System Model
Field Current
Limiter
VAMAX
VRMAX
EC
1
1 + sTR
2
−
Σ
+
REF
Reference
Signal
K PR +
K IR
s
+
−
4
VRMIN
1st PI Controller
Σ
K PA +
K IA
s
VF
VEMAX
KP ⋅ ETRM
+
Minimum
VA Gate 1
π
3
− K L VFE
VAMIN
2nd PI Controller
Σ
+
+
KF 2
1
sTE
Σ
−
1
VE
FEX
VEMIN
VX = VE SE (VE )
VFE
E FD
π
FEX = f ( IE )
VX
+
+
Σ Σ
If field current limiter is included, VEMAX is off.
V
-K I
If field current limiter is excluded, VEMAX = FEMAX D FD
K E +SE (VE )
States
1 - VE
2 - Sensed Vt
3 - VAPI
4 - VRPI
5 - LL
6 - IFD PI
Model supported by PSSE
+
KE
+
KD
KF1
IN =
KC IFD
VE
I FD
Exciter EX2000 REFERENCE SIGNAL MODEL Exciter EX2000 Reference Signal Model
KVHZ
Frequency
QELEC
SBASE
Machine MVA BASE
1
ETERM
Reactive
Current
KRCC
VREF
VUEL
+
+
+
VSTB
Reference Signal M odel
Model supported by PSSE
−
Σ
REFLIMP
Minimum
Gate 2
REF
Exciter EX2000 FIELD CURRENT LIMITER MODEL Exciter EX2000 Field Current Limiter Model
IFD REF1
Level
Detector
Output =1 if level exceeded
Latch
Gate 1
Inverse Timing
IFD REF2
OR
( I 1, T 1)
Output =1 if
timing expired
( I 2, T 2)
Latch
Gate 2
( I 3, T 3)
( I 4, T 4)
IFD LIM P
IFD
KPIFD +
A
C
+
D
A
To
Minimum
Gate 1
C
Σ
−
IFD LIM N
B
3rd PI Controller
B
1+ sTLEAD
1+ sTLAG
Model supported by PSSE
6
D
IFD REF3
IFD REF4
KIIFD
s
5
IFD ADVLIM
Advance Lim it
Field Current Lim iter M odel
(Over Excitation Lim iter)
S w itch O peratio n
O u tp u t D = B if C = 0
O u tp ut D = A if C = 1
Exciter EXAC1 Exciter EXAC1
IEEE Type AC1 Excitation System Model
VS
VREF
EC
1
1 + sTR
2
+
−
VC
Σ
+
+
Σ
−
VRM AX
1+ sTC
1+ sTB
4
KA
1+ sTA
VRMIN
VF
3
+
VR
1
sTE
Σ
−
1
VE
E FD
π
FEX
0
FEX = f ( IN )
5
sKF
1+ sTF
States
1 - VE
VFE
Σ
+
KE + SE
+
2 - Sensed Vt
3 - VR
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF also uses VAMIN and VAMAX
Simulator will narrow the limit range as appropriate when loading the DYD file
If VAMIN > VRMIN then VRMIN = VAMIN
If VAMAX < VRMAX then VRMAX = VAMAX
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
KD
IN =
KC IFD
VE
I FD
Exciter EXAC1A Exciter EXAC1A
Modified Type AC1 Excitation System Model
VS
VREF
EC
1
1 + sTR
2
−
VC
+
Σ
VRM AX
+
+
Σ
−
VF
1+ sTC
1+ sTB
4
KA
1+ sTA
3 +
VR
VRMIN
1
sTE
Σ
−
1
FEX = f ( IN )
VFE
+
KE + SE
+
KD
States
1 - VE
2 - Sensed Vt
5
E FD
π
FEX
0
Σ
VE
sKF
1+ sTF
3 - VR
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
IN =
KC IFD
VE
I FD
Exciter EXAC2 Exciter EXAC2
IEEE Type AC2 Excitation System Model
VREF
EC
2
−
VS
+
1
1 + sTR V Σ
C
4
+
+
VAMAX
Σ
−
VF
1+ sTC
1+ sTB
3
KA
1+ sTA
VAMIN
VRM AX
+
Σ
VA
−
VH
LV
Gate
VL
+
KB
VRM IN
KL
VR
Σ
1
sTE
Σ
−
−
VE 1
π
FEX
0
+
FEX = f ( IN )
VLR
KH
5
sKF
1+ sTF
E FD
IN
VFE
Σ
+
KE + SE
+
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
KD
IN =
KC IFD
VE
I FD
Exciter EXAC3 Exciter EXAC3
IEEE Type AC3 Excitation System Model
EC
1
1 + sTR
2
−
+
VC
Σ
1+ sTC
1+ sTB
Σ
−
4
KA
1+ sTA
HV
Gate
3
VA
π
+
VR
1
sTE
Σ
−
VN
s
1+ sTF
VE 1
FEX = f ( IN )
VFE
IN
KN
Σ
KF
EFD
EFD N
E FD
π
FEX
0
KR
5
VFEMAX
VLV
VAMIN
VF
−
+
VAMAX
+
+
Σ
KLV
VS
VREF
+
KE + SE
+
KD
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model supported by PSSE
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
IN =
KC IFD
VE
I FD
Exciter EXAC3A Exciter EXAC3A
IEEE Type AC3 Excitation System Model
KR
VREF
EC
1
1 + sTR
2 +
−
Σ
VC +
VEMAX
VAMAX
1+ sTC
1+ sTB
4
+
Σ
−
KA
1+ sTA
3
VA
π
+
VR
Σ
1
sTE
−
VAMIN
VS
VE 1
FEX = f ( IN )
IN
Σ
+
IN =
KE + SE
+
5
States
1 - VE
2 - Sensed Vt
3 - VA
4 - VLL
5 - VF
Model supported by PSLF
VN
s
1+ sTF
KN
E FD
π
FEX
VEMIN
VFE
VF
Speed
KC IFD
VE
I FD
KD
KF
EFD
EFD N
VFEMAX =
VEMAX =
VEMIN =
( K L1VC +VS +VREF -VC -VF )
K FA K L1
( VFEMAX -K D I FD )
S E +K E
VLV
FEX
Exciter EXAC4 Exciter EXAC4
IEEE Type AC4 Excitation System Model
VS
VREF
EC
+
1
1 + sTR
2 −
Σ
+
VERR +
States
1 - EField before limit
2 - Sensed Vt
3 - VLL
Model supported by PSLF and PSSE
VIM AX
Σ
VIM IN
VRM AX -K C I IFD
1+ sTC
1+ sTB
3
KA
1+ sTA
1
VRM IN -K C I IFD
E FD
Exciter EXAC6A Exciter EXAC6A
IEEE Type AC6A Excitation System Model
VREF
EC
2
−
1
1 + sTR
+
Σ
+
VAMAX
KA (1+ sTk ) 3 1+ sTC
1+ sTB
1+ sTA
4
VA
+
Σ
−
VAMIN
VS
Speed
VT VRM AX
+
VR
VT VRMIN
1
sTE
Σ
−
VE 1
FEX
FEX = f ( IN )
0
VHM AX
5
1+ sTJ
1+ sTH
IN
VH
KH
0
Σ+ Σ
−
VFELIM
States
1 - VE
2 - Sensed Vt
3 - TA Block
4 - VLL
5 - VF
Model supported by PSLF
E FD
π
+
KE + SE
+
IN =
KC IFD
VE
VFE
KD
I FD
Exciter EXAC8B Exciter EXAC8B
Brushless Exciter with PID Voltage Regulator
VR EF
EC
1
1 + sTR
2
−
+
KVP
VRM AX
+ VIM AX
Σ
KVI
s
+
5
+Σ
+
-VIM AX
VS
1
1+ sTA
3
Speed
+
Σ
−
VE 1
E FD
π
FEX
FEX = f ( IN )
0
VRMIN
sKVD
1 + sTVD
1
sTE
4
IN
Σ
+
KE + SE
+
IN =
KC IFD
VE
VFE
KD
States
1 - VE
2 - Sensed Vt
3 - VR
4 - Derivative
5 - Integral
Model supported by PSLF
I FD
Exciter EXBAS Exciter EXBAS
Basler Static Voltage Regulator Feeding DC or AC Rotating Exciter Model
VREF
EC
1
1 + sTR
2
−
VU EL
VST B
+
+
Σ
+
4
+
+
Σ
KP +
−
KI
s
VRM AX
5
1+ sTC
1+ sTB
KA
1+ sTA
3
+
1
sTE
Σ
−
sKF
1+ sTF
1+ sTF1
1+ sTF 2
IN
Σ
+
KE + SE
+
KD
States
1 - VE
2 - Sensed Vt
3 - VR
4 - PI
5 - LL
6 - Feedback LL
7 - Feedback
Model supported by PSSE
π
FEX = f ( IN )
VO EL
6
E FD
FEX
VRMIN
7
VE 1
IN =
KC IFD
VE
I FD
Exciter EXBBC Exciter EXBBC
Transformer-fed Excitation System
VREF
EC
1
1+ sTF
−
Σ
+
+
1+ sT3
1+ sT4
VRM AX
+
T
K 2
T1
Σ
+
+
−
VRMIN
E T E FDMAX
+
Σ
−
E T E FDMIN
XE
1 ⎛ T1 ⎞ 1
⎜ −1⎟
K ⎝ T2 ⎠ 1+ sT2
I FD
Sw itch = 1
Sw itch = 0
Σ
1
1+ sTE
Supplem ental
Signal
Model supported by PSLF but not yet implemented in Simulator
E FD
Exciter EXDC1 Exciter EXDC1
IEEE DC1 Excitation System Model
VS
EC
1
1 + sTR
VREF
VRM AX
+
2 −
+
Σ
−
1+ sTC
1+ sTB
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model supported by PSLF
KA
1+ sTA
VRM IN
VF
4
+
VR
Σ
1
sTE
−
KE + SE
5
States
1 - E FD
3
Speed
sKF
1+ sTF1
π
E FD
1
Exciter EXDC2_GE Exciter EXDC2_GE
IEEE Type DC2 Excitation System Model
Vcomp
1
1 + sTR
2
−
Speed
VS
VREF
+
+
Σ
−
VRM AX VT
1+ sTC
1+ sTB
3
4 +
KA
1+ sTA
−
VRMIN VT
States
1 - E FD
2 - Sensed Vt
3 - VB
4 - VR
5 - VF1
6 - VF2
Model supported by PSLF
1
1+ sTE
KE + SE
sKF
(1+ sTF1 )(1+ sTF 2 )
5
Σ
6
π
E FD
1
Exciter EXDC2_PTI Exciter EXDC2_PTI
IEEE Type DC2 Excitation System Model
VREF
Vcomp
1
1 + sTR
2
−
VRM AX VT
+
+
Σ
Speed
VS
VERR
+
1+ sTC
1+ sTB
Σ
−
3
KA
1+ sTA
VRMIN VT
5
States
1 - E FD
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model supported by PSEE
sKF
1+ sTF1
4 +
Σ
−
1
1+ sTE
KE + SE
π
E FD
1
Exciter EXDC2A Exciter EXDC2A
IEEE Type DC2 Excitation System Model
VS
EC
1
1 + sTR
2 −
VRM AX VT
+
1+ sTC
1+ sTB
Σ
+ −
3
VREF
VRMIN VT
VF
5
States
1 - E FD
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model supported by PSLF
KA
1+ sTA
sKF
1+ sTF1
4 +
VR
Speed
Σ
−
1
sTE
KE + SE
π
E FD
1
Exciter EXDC4 Exciter EXDC4
IEEE Type 4 Excitation System Model
VS
EC
VRM AX
−
+
+
Σ
1
1
sTRH
-K R
KR
-1
VREF
VRM IN
Speed
2
VRH
+
VR
Σ
1
KE + sTE
−
π
VRM AX
-K V
VRMIN
States
1 - E FD
2 - VRH
Model supported by PSLF
KV
SE
π
E FD
1
Exciter EXELI Exciter EXELI
Static PI Transformer Fed Excitation System Model
K s1
PGEN
⎛ sTW ⎞
⎜
⎟
⎝ 1 + sTW ⎠
4
EC
1
1 + sTFV
3
−sTs2
1+ sTs2
Σ
+
6
8
− S M AX
7
Ks2
1 + sTs1
E F M AX
+
2
−
States
1 - TNU
5
S M AX
+
+
Σ
+
VPU
VR EF
Σ
+
1
sTNU
Σ
VPI
+
E FD
Σ
−
−
E F M IN
XE
−
3 - Sensed I FLD
Σ+
4 - PGEN Washout1
5 - PGEN Washout2
7 - Lag Stabilizer
8 - Washout Stabilizer
Model supported by PSLF and PSSE
+
VPNF
2 - Sensed Vt
6 - PGEN Washout3
1
D PNF
3
1
1+ sTFI
I FD
Exciter EXPIC1 Exciter EXPIC1
Proportional/Integral Excitation System Model
VREF
EC
2
−
1
1 + sTR E T
VR1
+
Σ
+
VS
Σ
−
KA (1+ sTA1 ) 3
VA
s
(1+ sTA3 )
(1+ sTA2 )(1+ sTA4 )
4
VR2
VRM AX
π
VR
VRM IN
5
VT
IT
VB
7
FEX
If K P = 0 and K I = 0, then VB = 1
If TE = 0, then EFD = E0
States
1 - E FD
2 - Sensed Vt
3 - VA
4 - VR1
5 - VR
6 - VF1
7 - VF
Model supported by PSLF and PSSE
π
VE = KPVT + jKI IT
I FD
IN =
KC IFD
VE
IN
+
E0
E FD M IN
sKF
(1+ sTF1 )(1+ sTF 2 )
6
E FD M AX
FEX = f ( IN )
Σ
−
1
sTE
KE + SE
E FD
1
Exciter EXST1_GE Exciter EXST1_GE
IEEE Type ST1 Excitation System Model
VS
Vcomp
1
1 + sTR
2
+
−
VREF
+
Σ
−
VAM AX
VIM AX
VIM IN
1+ sTC
1+ sTB
1+ sTC1
1+ sTB1
3
5
KA
1+ sTA
VT VRM AX -K C I IFD
1
+
Σ
+
−
VT VRM IN -K C I IFD
VAM IN
4
sKF
1+ sTF
2 - Sensed Vt
3 - VLL
4 - VF
5 - VLL1
Model supported by PSLF
E FD
−
XE
K lr
Σ
−
0
Ilr
States
1 - VA
Σ
+
I FD
Exciter EXST1_PTI Exciter EXST1_PTI
IEEE Type ST1 Excitation System Model
VREF
Ec
1
1 + sTR
+
2
−
Σ
VS
+
VERR
Σ
−
+
VIM AX
VIM IN
VT VRM AX -K C I IFD
1+ sTC
1+ sTB
2 - Sensed Vt
3 - VLL
4 - VF
Model supported by PSSE
KA
1+ sTA
1
E FD
VT VRM IN -K C I IFD
4
States
1 - E FD before limit
3
sKF
1+ sTF
Exciter EXST2 Exciter EXST2
IEEE Type ST2 Excitation System Model
VREF
EC
2
1
1 + sTR
VS
+
−
Σ
+
VERR
Σ
E FD MAX
VRM AX
+
1+ sTC
1+ sTB
−
5
3
KA
1+ sTA
VR +
VRMIN
Σ
+
VB
+
1
sTE
Σ
−
1
E FD
0
KE
4
VT
IT
States
1 - E FD
sKF
1+ sTF
VE
VE = KPVT + jKI IT
If K P = 0 and K I = 0, then VB = 1
π
FEX
IFD
IN =
KC IFD
VE
IN
2 - Sensed Vt
3 - VR
4 - VF
5 - VLL
Model supported by PSLF
Model supported by PSSE does not include TB and TC inputs
FEX = f ( IN )
Exciter EXST2A Exciter EXST2A
Modified IEEE Type ST2 Excitation System Model
VREF
VCOMP
1
1 + sTR
2
−
Σ
VS
+
+
VERR
Σ
VRM AX
+
1+ sTC
1+ sTB
−
5
VF
KA
1+ sTA
3
VR
VRMIN
E FD MAX
π
+
1
sTE
Σ
−
VB
1
E FD
0
KE
4
VT
IT
VE
VE = KPVT + jKI IT
IFD
IN =
KC IFD
VE
sKF
1+ sTF
IN
If K P = 0 and K I = 0, then VB = 1
π
FEX = f ( IN )
States
1 - E FD
2 - Sensed Vt
3 - VR
4 - VF
5 - VLL
Model supported by PSLF
Model supported by PSSE does not include TB and TC inputs
FEX
Exciter EXST3 Exciter EXST3
IEEE Type ST3 Excitation System Model
VGMAX
VREF
VS
EC
1
1 + sTR
VT
IT
2
−
Σ
+
VERR
+
Σ
+
VRM AX
VG
VIM AX
KJ
VIM IN
1+ sTC
1+ sTB
VE
VE = KPVT + j ( KI + KP XL ) IT
3 +
VA
−
1
KA
1+ sTA VR
∑
VRMIN
π
K P = K P e jθ P
I FD
IN =
KC IFD
VE
IN
KG
FEX = f ( IN )
FEX
States
1 - VR
2 - Sensed Vt
3 - LL
Model supported by PSSE
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
E FD M AX
π
VB
E FD
Exciter EXST3A Exciter EXST3A
IEEE Type ST3 Excitation System Model
VGMAX
VS
EC
1
1 + sTR
2
−
+
VREF
Σ
+
VIM AX
VIM IN
VG
1+ sTC
KJ
1+ sTB
IT
VA
−
+
∑
KA
1+ sTA
VRMIN
VE = KPVT + j ( KI + KP XL ) IT
VT
3
KG
VRM AX
VE
1
π
VB
VBMAX
π
Speed
K P = K Pe
jθ P
I FD
States
1 - VR
2 - Sensed Vt
3 - LL
Model supported by PSLF
IN =
KC IFD
VE
IN
FEX = f ( IN )
FEX
E FD
Exciter EXST4B Exciter EXST4B
IEEE Type ST4B Excitation System Model
KG
VS
EC
1
1 + sTR
2
+
−
Σ
+
VREF
VM MAX
VRM AX
K
KPR + IR
s
4
1
1+ sTA
3
−
+
∑
VMMIN
VRM IN
VT
IT
VE = KPVT + j ( KI + KP XL ) IT
VE
K P = K P e jθ P
I FD
States
1 - VMInt
2 - Sensed Vt
3 - VA
4 - VR
Model supported by PSLF
KI
IN = C FD
VE
KPM +
IN
FEX = f ( IN )
π
FEX
KIM 1
s VM
π
VB
VBMAX
E FD
Exciter EXWTG1 Exciter EXWTG1
Excitation System Model for Wound-Rotor Induction Wind-Turbine Generators
ω REF
ωR
PE
States
1 - R external
2 - SpeedReg
3 - Washout
Model supported by PSLF
−
+
∑
sKDP
1+ sTDP
R M AX
R EX T
1+ sTW1
1+ sTW 2
KW
3
2
+
+
+
∑
1
1+ sTA
R MIN
1
R EXT (E FD )
Exciter EXWTGE Exciter EXWTGE
Excitation System Model for GE Wind-Turbine Generators
W indVAR Emulation
VRFQ (VR EF )
VREG
1
1 + sTR
4
−
+
PE
1
fN
∑
PFAREF (VREF )
1
1+ sTP
KIV
s
KPV
1+ sTV
tan(⋅)
7
Q REF
(VREF )
π
+
Q M AX
Q ORD
1
1+ sTC
∑
3 +Q
M IN
6
Sw itch = 0
Sw itch = 1
pfaflg
Sw itch = 0
Q ORD
States
5
Q ORD from separate model
(VREF )
Sw itch = − 1
Sw itch = 1
varflg
I PM AX
PORD (VS )
2 - E"QCMD
From Wind Turbine Model
÷
IPCMD (IFD )
VT ER M
3 - K PV
4 - VregMeas
VM AX
Q GEN
5 - K IV
7 - PMeas
Model supported by PSLF
Q CM D
Q M IN
1 - Vref
6 - QORD
Q M AX
Open
Loop
Control
−
QCMD
+
∑
K QI
VREF
s
1
VMIN
VTERM + XI QM AX
+
−
∑
KVI
s
T o Generator
M odel
2
EQ''CMD (EFD )
VTERM + XI QMIN
Exciter IEEET1 Exciter IEEET1
IEEE Type 1 Excitation System Model
4
VR EF
EC
1
1 + sTR
VRM AX
+
2
−
Σ
+
sK F
1 + sTF
−
+
Σ
KA
1+ sTA
3 +
VR
1
sTE
Σ
−
VRMIN
VS
VE = SE ⋅ EFD
VE
+
Σ
+
KE
States
1 - EField
2 - Sensed Vt
3 - VR
4 - VF
Model supported by PSSE
Model supported by PSLF includes speed multiplier that is not implemented in Simulator
E FD
1
Exciter IEEET2 Exciter IEEET2
IEEE Type 2 Excitation System Model
VR EF
EC
1
1 + sTR
2
−
VRM AX
+
Σ
+
+
Σ
−
KA
1+ sTA
3
+
VR
1
sTE
Σ
−
VRMIN
VS
1
1 + sTF 2
5
States
1 - EField
2 - Sensed Vt
3 - VR
4 - VF1
5 - VF2
Model supported by PSSE
sK F
1 + sTF 1
4
VE = SE ⋅ EFD
VE
+
Σ
+
KE
E FD
1
Exciter IEEET3 Exciter IEEET3
IEEE Type 3 Excitation System Model
VR EF
VRM AX
EC
1
1 + sTR
2
−
Σ
+
VS
VT
IT
⎛ 0.78 ⋅ I FD ⎞
A=⎜
⎟
⎝ VTH EV ⎠
If A > 1, V B = 0
2
States
1 - EField
2 - Sensed Vt
3 - VR
4 - VF
Model supported by PSSE
+
+
KA
1+ sTA
Σ
−
3 +
VR
VBM AX
Σ
+
VRMIN
1
KE + sTE
VB
0
4
π
VTHEV = KPVT + jKI IT
I FD
1− A
sK F
1 + sTF
1
E FD
Exciter IEEET4 Exciter IEEET4
IEEE Type 4 Excitation System Model
SE
ψ
VR EF
EC
+
−
Σ
π
VRM AX
1
ΔV
1
sTRH
-K R
-1
KR
ΔV < KV
VRH
2
+
VR
−
Σ
VRMIN
ΔV > KV
VRM AX
-K V
VRMIN
States
1 - EField
2 - VRH
Model supported by PSSE
KV
1
KE + sTE
E FD
1
Exciter IEEET5 Exciter IEEET5
Modified IEEE Type 4 Excitation System Model
SE
ψ
VR EF
π
VRM AX
+
EC
−
Σ
ΔV
1
sTRH
ΔV < KV
2
VRH
+
VR
−
Σ
VRMIN
ΔV > KV
VRM AX
-K VV
VRMIN
States
1 - EField
2 - VRH
Model supported by PSSE
KV
RMAX
1
KE + sTE
E FD
1
Exciter IEEEX1 Exciter IEEEX1
IEEE Type 1 Excitation System Model
VS
VREF
EC
1
1 + sTR
2
−
+
Σ
VRM AX
Regulator
1+ sTC 3
KA
1+ sTA
1+ sTB
+
+
VERR
Σ
−
VF
4 +
VR
Σ
−
1
sTE
VRM IN
KE + SE
5
sKF
1+ sTF1
D am p in g
States
1 - EField
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model supported by PSSE
1
E FD
Exciter IEEEX2 Exciter IEEEX2
IEEE Type 2 Excitation System Model IEEEX2
VS
VREF
EC
1
1 + sTR
2
−
+
Σ
+
VERR +
Σ
−
VRM AX
Regulator
1+ sTC 3
KA
1+ sTA
1+ sTB
VF
4
+
VR
Σ
−
1
sTE
VRM IN
KE + SE
sKF
(1+ sTF1 )(1+ sTF 2 )
D am p in g
5
States
1 - EField
2 - Sensed Vt
3 - LL
4 - VR
5 - VF1
6 - VF2
Model supported by PSSE
6
1
E FD
Exciter IEEEX3 Exciter IEEEX3
IEEE Type 3 Excitation System Model
VS
VREF
EC
1
1 + sTR
2
−
+
Σ
+
VERR
VRM AX
Regulator
+
3
KA
1+ sTA
Σ
−
VF
+
VR
Σ
0
VRMIN
4
sKF
1+ sTF
Damping
VBM AX
VT
IT
VTHEV = KPVT + jKI IT
States
1 - EField
2 - Sensed Vt
3 - VR
4 - VF
Model supported by PSSE
+
VT H
IFD
V − ( 0.78IFD )
2
TH
1
KE + sTE
2
0
VB
1
E FD
Exciter IEEEX4 Exciter IEEEX4
IEEE Type 4 Excitation System Model
VREF
EC
1
1 + sTR
2
−
+
VRM AX
KV
Σ
VRMAX − VRMIN
sKV TRH
VERR
−K V
3
VRH
VRMIN
If VERR ≥ KV , VR = VRMAX
If VERR < KV , VR = VRH
If VERR ≤ −KV , VR = VRMIN
+
VR
Σ
−
1
sTE
KE + SE
States
1 - EField
2 - Sensed Vt
3 - VRH
Model supported by PSSE
1
E FD
Exciter IEET1A Exciter IEET1A
Modified IEEE Type 1 Excitation System Model
VREF
VRM AX
+
EC
Σ
−
+
+
Σ
KA
1+ sTA
−
E FD M AX
2
+
Σ
−
1
sTE
E FD M IN
VRMIN
VS
3
States
1 - EField
2 - VR
3 - VF
Model supported by PSSE
sKF
1+ sTF
1
KE + SE
E FD
Exciter IEET1B Exciter IEET1B
Modified IEEE Type 1 Excitation System Model
sKF1
1+ sTF1
Switch=1
SE
Switch=0
I M AG
ψ
XE
EC
+
+
Σ
Bias
VREF
VSM AX
+
1
−
1 + sTR VT
+
+
Σ
−
KA
1+ sTA1
+
Σ Σ
+
VSM IN
π
VRMAX
VR
1
1+ sTA2
+
VREG
−
Σ
+
1
sTE
VRMIN
VS
Model supported by PSSE but not implemented yet in Simulator
−KE
E FD
Exciter IEET5A Exciter IEET5A
Modified IEEE Type 4 Excitation System Model
SE
ψ
VR EF
+
−
π
VRM AX
KA
1+ sTRH
Σ
*
VRM IN
EC
2
ΔV < KV
+
VR
−
Σ
ΔV > KV
E FD M AX
1
KE + sTE
1
E FD M IN
VT O
VRM AX
+
−
Σ
States
1 - EField
2 - VRH
Model supported by PSSE
-K V
ΔVT
VRMIN
KV
* If T RH equals zero, block becom es
KA
s
E FD
Exciter IEEX2A Exciter IEEX2A
IEEE Type 2A Excitation System Model
VREF
VS
+
+
EC
1
1 + sTR
2
−
Σ
VERR
+Σ
VRM AX
−
1+ sTC
1+ sTB
VF
1 - EField
2 - Sensed Vt
3 - VB
4 - VR
5 - VF
Model supported by PSSE
KA
1+ sTA
VRMIN
5
States
3
sKF
1+ sTF1
4
+
VR
1
sTE
Σ
−
0
KE + SE
1
E FD
Exciter REXS Exciter REXS
General Purpose Rotating Excitation System Model
VREF
EC
1
1 + sTR
2
VIM AX
+
−
+
VRM AX
ΣV
ERR
+
K
KVP + VI
s
Σ
−
6
Regulator
(1+ sTC1)(1+ sTC2 )
(1+ sTB1)(1+ sTB2 )
VF − V
IM AX
VS
7
8
KA
1+ sTA
States
VR 5
VRMIN
9
sKF
1+ sTF
10
1 - VE
6 - Voltage PI
2 - Sensed VT
7 - VI LL1
3 - VF
8 - VI LL2
4 - Current PI
9 - Feedback
5 - VR
10 - Feedback LL
KEFD
I TERM
1+ sTF1
1+ sTF 2
VFMAX
VR
+
+ Σ
−
K
KIP + II
s
4
1
1+ sTP
3
+
VCMAX
+
Σ
+ Σ
1
1
sTE0
−
VE
Speed
FEX = f ( IN )
IN
0
1
2
E FD
π
FEX
0
VFMIN
KH
Fbf
XC
I FE
Σ
+
KE + SE
+
KD
Model supported by PSLF. If flimf = 1 then multiply VRMIN ,VRMAX ,VFMIN , and VFMAX by VTERM .
IN =
KC IFD
VE
I FD
Exciter REXSY1 Exciter REXSY1
General Purpose Rotating Excitation System Model
Voltage Regulator
VREF
EC
1
1 + sTR
2
−
Σ
+
+
−
(1+ sTC1)(1+ sTC2 )
(1+ sTB1)(1+ sTB2 )
K
KVP + VI
s
Σ
VF
F ⋅ VRMAX
6
VIM AX
+
− VIM AX
10
VS
7
1+ sTF1
1+ sTF 2
9
F= [1.0 + F1IMF (E T -1.0) ] ⋅ (K E +K D +S E )
1
1+ sTA
8
F ⋅ VRMIN
sKF
1+ sTF
VR
5
0
1
I FE
Fbf 2
E FD
I TERM
Exciter Field Current Regulator
VR
+
Σ
−
K
KIP + II
s
4
XC
F ⋅ VFM AX
1
1+ sTP
3
VCMAX
+
1
sTE0
+ Σ
−
VE
I FE
FEX
IN
States
1 - VE
6 - Voltage PI
2 - Sensed VT
7 - VI LL1
3 - VF
8 - VI LL2
4 - Current PI
9 - Feedback
5 - VR
10 - Feedback LL
Model supported by PSSE
E FD
π
FEX = f ( IN )
F ⋅ VFMIN
KH
1
Σ
+
KE + SE
+
KD
IN =
KC IFD
VE
I FD
Exciter REXSYS Exciter REXSYS
General Purpose Rotating Excitation System Model
Voltage Regulator
VREF
EC
1
1 + sTR
VIM AX
+
2
−
Σ
+
+
−
VS
(1+ sTC1)(1+ sTC2 )
(1+ sTB1)(1+ sTB2 )
K
KVP + VI
s
Σ
VF
F ⋅ VRMAX
6
− VIM AX
10
7
1+ sTF1
1+ sTF 2
9
F= [1.0 + F1IMP (E T -1.0) ] ⋅ (K E +K D +S E )
1
1+ sTA
8
F ⋅ VRMIN
sKF
1+ sTF
0
1
Fbf
VR
5
I FE
2
E FD
Exciter Field Current Regulator
VR
+
Σ
−
K
KIP + II
s
4
F ⋅ VFM AX
1
1+ sTP
3
+
1
sTE0
+ Σ
−
VE
I FE
FEX
IN
States
1 - VE
6 - Voltage PI
2 - Sensed VT
7 - VI LL1
3 - VF
8 - VI LL2
4 - Current PI
9 - Feedback
5 - VR
10 - Feedback LL
Model supported by PSSE
E FD
π
FEX = f ( IN )
F ⋅ VFMIN
KH
1
Σ
+
KE + SE
+
KD
IN =
KC IFD
VE
I FD
Exciter SCRX Exciter SCRX
Bus Fed or Solid Fed Static Excitation System Model
C SWITCH =0
ET
E FDM AX
VREF
EC
+
Σ
−
+
1+ sTA
1+ sTB
1
VS
States
1 - Lead-Lag
2 - VE
Model supported by PSLF
Model supported by PSSE has CSWITCH = 1
K
1+ sTE
E FDMIN
2
C SWITCH =1
1
π
E FD
Exciter SEXS_GE Exciter SEXS_GE
Simplified Excitation System Model
VREF
Vcomp
1
1 + sTR
2
+
−
+
Σ
Stabilizer
O utput
States
1 - EField
2 - Sensed Vt
3 - LL
4 - PI
Model supported by PSLF
E MAX
3
1+ sTA
1+ sTB
KC (1+ sTC )
sTC
E FDM AX
4
K
1+ sTE
E MIN
1
E FDM IN
E FD
Exciter SEXS_PTI Exciter SEXS_PTI
Simplified Excitation System Model
VREF
+
EC
Σ
−
+
VS
States
1 - EField
2 - LL
Model supported by PSSE
E FDM AX
1+ sTA
1+ sTB
2
K
1+ sTE
E FDMIN
1
E FD
Exciter ST6B Exciter ST6B
IEEE 421.5 2005 ST6B Excitation System Model
I FD
VC
1
1 + sTR
−
2
I LR
VO EL
VO EL
(O EL=1)
(O EL=2)
+
KCL
HV
Gate
Σ
+
VREF
+
−
Σ
+
VU EL
VS
KPA +
KIA sKDA
+
s 1+ sTDA
VAMIN
3
VT
1
KFF
VAMAX
−
KLR
VRMIN
Alternate OEL Inputs
−
Σ
4
States
1 - E FD
2 - Sensed Vt
3 - PID1
4 - PID2
5 - VG
ST6B supported by PSSE
ESST6B supported by PSLF with optional VRMULT
VA
VRM AX
+
+
Σ
−
KM
+
VRMIN
VG
5
VB
LV
Gate
Σ
sKG
1+ sTG
VRMULT
0
VR
π
1
1 + sTS
E FD
1
Exciter ST7B Exciter ST7B
IEEE 421.5 2005 ST7B Excitation System Model
V
VDR OO P
O EL
(O EL=1) Alternate
OEL Inputs
+
VSCL +
Σ
+
V
O EL
(O EL=2)
VS
VM AX
+
+
1+ sTG
1+ sTF
1
1 + sTR
VC
LV
Gate
Σ
+
HV
Gate
Σ
VMIN
Σ
VREF_FB
KPA
Alternate UEL Inputs
VREF
V
V UEL
UEL
(U EL=2)
(U EL=1)
VO EL
V UEL
(O EL=3)
(U EL=3)
VT VRM AX
HV
Gate
VT VRMIN +
Σ
−
LV
Gate
Σ
+
1+ sTC
1+ sTB
−
KH
Σ
+
LV
Gate
E FD
1
1 + sTS
HV
Gate
VT VRMIN
VT VRM AX
KL
ST7B supported by PSSE
ESST7B supported by PSLF
Not implemented yet in Simulator
+
sKIA
1+ sTIA
Exciter TEXS Exciter TEXS
General Purpose Transformer-Fed Excitation System Model
Constant
Source Voltage
Generator
Terminal Voltage
KCL
I LR
VREF
EC
1
1+ sTR
2
−
Σ
+
− VIM AX
VS
States
1 - Feedback
2 - Sensed Vt
3 - Derivative Controller
4 - Integral Controller
Model supported by PSLF
VRMAX
VIM AX
+
+
K
KVP + VI
s
4
+
Σ
−
KLR
0
KFF
Σ
+
+
+
−
Σ
KM
+
3
VRM AX
Σ
LV
Gate
VR
π
+
VE
VRM IN
VRMIN
sKVD
1+ sTVD
0
1
1
KG
1+ sTG
Σ−
XC
I FD
E FD
Exciter URST5T Exciter URST5T
IEEE Proposed Type ST5B Excitation System Model
VU EL
EC
VRM AX /K R
1
1 + sTR
2
−
Σ
+
HV
Gate
LV
Gate
+
Σ
+
1+ sTC1
1+ sTB1
VRMIN /K R
VREF
States
1 - VR
2 - Sensed Vt
3 - LL1
4 - LL2
Model supported by PSSE
VO EL
VSTB
3
VRM AX /K R
1+ sTC2
1+ sTB2
VRMIN /K R
VRM AX
4
KR
VRMIN
VRM AX VT
1
1+ sT1
1
+
Σ
E FD
−
VRMIN VT
KC
I FD
Exciter WT2E1 Exciter WT2E1
Rotor Resistance Control Model for Type 2 Wind Generator
Pow er-Slip C urve
Speed
1
1+ sTSP
2
R M AX
−
Σ
KP +
+
R MIN
Pelec
1
1+ sTPC
States
1 - R external
2 - Speed
3 - Pelec
Model supported by PSSE
3
1
sTI
1
Exciter WT3E and WT3E1 Exciter WT3E and WT3E1
Electrical Control for Type 3 Wind Generator
Reactive Pow er Control M odel
States
VRFQ
VC
1
1 + sTR
4
−
+
Q M AX
+
1
1+ sTFV
∑
KPV
1+ sTV
3 +
1
1+ sTP
7
Q M IN
−1
1
Q M AX
+
0
varflg
−
K QI
∑
1
Q M IN
( PMIN , ω PMIN )
7 - PMeas
3 - K PV
8 - PowerFilter
4 - VregMeas
9 - SpeedPI
1
1+ sTPWR
+
8
−
KQV
∑
−
RPM AX
KIP
s
9
π
+
EQCMD
0
−
PMAX
1
sTFP
∑
RPM IN
P
2
>0
s
Speed
KPP +
vltflg
XI QMIN
+
∑
10 - PORD
XI QMAX
VMIN
( P = 100%, ω P 100 )
( P = 20%, ω P 20 )
2 - E qppcmd
VREF
s
Speed
( P = 60%, ω P 60 )
( P = 40%, ω P 40 )
6 - QORD
VT ER M
VMAX
Q elec
Active Pow er (Torque) Control M odel
Speed
1 - Vref
5 - K IV
π
Q REF
Pelec
6
tan
PFAREF
Pelec
1
fN
∑
5
KIV
s
PMIN
10
I PM AX
÷
I PCMD
VT ER M
WT3E supported by PSLF with RPMAX = Pwrat and RPMIN = -Pwrat , TFV = TC
WT3E1 supported by PSSE uses vltflg to determine the limits on E QCMD . When vltflg > 0 Simulator always uses XIQMAX and XIQMIN .
Exciter WT4E1 Exciter WT4E1
Electrical Control for Type 4 Wind Generator
VRFQ
VC
1
1 + sTRV
−
+
∑
1
1+ sTFV
∑
+
Q M IN
Q REF
tan
1
1+ sTP
Q M AX
+
KPV
1+ sTV
PFAREF
Pelec
KIV
s
π
0
1
Q M AX
1
0
pfaflg
−
+
varflg
PREF
1
1+ sTPWR
+
∑
−
K QI
∑
−
VMINCL
KIP
s
VT ER M
−
+
∑
PORD
Model supported by PSSE but not yet implemented in Simulator
KVI
s
IQCMD
I QMIN
Converter Current Limit
I PM AX
÷
dPMIN
sKF
1+sTF
∑
pqflag
dPMAX
KPP +
I QM AX
+
s
Q M IN
−
Pelec
VMAXCL
Q elec
0.01
VT ER M
I PCMD
Machine Model CSVGN1 Machine Model CSVGN1
Static Shunt Compensator CSVGN1
O ther Signals
V O T H SG
V
+
−
−
Σ
V REF
V MAX
K (1+ sT1 )(1+ sT2 )
(1+ sT3 )(1+ sT4 )
V MIN
1.
1
1+ sT5
R MIN / RBASE
C BASE / SBASE
π
+
−
Σ
Y
MBASE / SBASE
RBASE = MBASE
Note : V is the voltage magnitude on the high side of generator step-up transformer if present.
Model supported by PSSE
Machine Model CSVGN3 Machine Model CSVGN3
Static Shunt Compensator CSVGN3
O ther Signals
V O T H SG
V
+
−
−
Σ
V REF
V MAX
V ERR
K (1+ sT1 )(1+ sT2 )
(1+ sT3 )(1+ sT4 )
V MIN
1.
1
1+ sT5
R MIN / RBASE
C BASE / SBASE
π
+
−
Σ
Y
MBASE / SBASE
1, if VERR > VOV
RMIN / RBASE if VERR < −VOV
RBASE = MBASE
Note : V is the voltage magnitude on the high side of generator step-up transformer if present.
Model supported by PSSE
Machine Model CSVGN4 Machine Model CSVGN4
Static Shunt Compensator CSVGN4
O ther Signals
V O T H SG
V IB
+
−
−
Σ
V MAX
V ERR
V REF
K (1+ sT1 )(1+ sT2 )
(1+ sT3 )(1+ sT4 )
V MIN
1.
1
1+ sT5
R MIN / RBASE
1, if VERR > VOV
RMIN / RBASE if VERR < −VOV
RBASE = MBASE
Model supported by PSSE
C BASE / SBASE
π
+
−
Σ
MBASE / SBASE
Y
Machine Model CSVGN5 Machine Model CSVGN5
Static Var Compensator CSVGN5
VOTHSG ( I )
Filter
VO LT (IBU S)
or
V OLT (ICO N(M ))
1
1+ sTs1
V EM AX
+
−
Σ
+
Regulator
64 4 4474 4 4 48
1st Stage
2nd Stage
1+ sTS 2
1+ sTS3
Σ
+
1+ sTS 4
1+ sTS5
KSVS
−V EM AX
VREF ( I )
V ERR
BR
B MAX
'
If VERR > DVLO : BR' = BMAX
+ KSD (VERR − DV )
If DVHI < VERR < DVLO : BR' = BR
'
If VERR < DVHI : BR' = BMIN
1
1+ sT6
'
BR
B SVS
B MIN
Fast O verride
T hyristor Delay
If DV = 0,
Model supported by PSSE
If DV > 0,
'
/ KSVS
DVLO = BMAX
DVLO = DV
'
/ KSVS
DVHI = BMIN
DVHI = −DV
MBASE(I )
SBASE
VAR ( L )
Machine Model CSVGN6 Machine Model CSVGN6
Static Var Compensator CSVGN6
Other
Signals
VOTHSG ( I )
Filter
V OLT (IBU S)
or
VO LT (IC O N (M ))
1
1+ sTs1
+
−
Σ
+
V MAX
1+ sTS 2
1+ sTS3
Σ
+
V MIN
VREF
V EMAX
1+ sTS 4
1+ sTS5
BR
KSVS
V EMIN
BIAS
V ERR
BR
B MAX
'
If VERR > DVLO : BR' = BMAX
+ KSD (VERR − DV )
If DVHI < VERR < DVLO : BR' = BR
'
If VERR < DVHI : BR' = BMIN
1
1+ sT6
B R'
+
+
B SVS
B MIN
Fast O verride
T hyristor Delay
If DV = 0,
Model supported by PSSE
Σ
+
If DV > 0,
'
/ KSVS
DVLO = BMAX
DVLO = DV
'
/ KSVS
DVHI = BMIN
DVHI = −DV
1
2
BSHUNT
Position 1 is normal (open)
If VERR > DV 2, switch will
close after TDELAY cycles.
Machine Model GENCC Machine Model GENCC
Generator represented by uniform inductance ratios rotor
modeling to match WSCC type F
X d − X d'
X d' − X d''
+
E fd
−
Σ
−
1
sTdo'
+
1
sT d''o
E q'
X d' − X d''
id
Se
d axis
π
Xq
Xd
Model supported by PSLF
Σ
−
X d − X d''
X d' − X d
q axis
−
E q'
E1
Machine Model GENCLS Machine Model GENCLS
Synchronous machine represented by “classical” modeling or
Thevenin Voltage Source to play Back known
voltage/frequency signal
R esp o n d in g
S ystem
Z a b = 0 .0 3
o n 1 0 0 M V A b ase
R eco rd ed
V o ltag e
A
B
R esp o n d in g
S ystem
I ppd
g en cls
B
Z a b = 0 .0 3
o n 1 0 0 M V A b ase
I ppd
g en cls
A
Model supported by PSLF
R esp o n d in g
S ystem
B
Machine Model GENROU Machine Model GENROU
Solid Rotor Generator represented by equal mutual
inductance rotor modeling
X
X
Pfd
E fd
+
Σ
−
−
1
sTdo'
+
Pkd
1
s T d''o
Σ
−
X d' − X d''
( X d' − X l ) * *2
''
d
'
d
− X
− X
l
l
+
X − X
X − Xl
'
d
'
d
X
+
'
d
''
d
+
Σ
Pd''
− Xl
d − AXIS
+
Σ
+
d
− X
'
d
Σ
id
+
+
Lad i fd
Pd''
Pq''
Model supported by PSLF
X
Xq − Xl
(Xd − Xl)
Se
P ''
* * *q − AXIS identical , swapping d and q substripts
Machine Model GENSAL Machine Model GENSAL
Salient Pole Generator represented by equal mutual
inductance rotor modeling
X
X
E fd
+
1
sTdo'
Σ
−
−
Pfd
+
Pkd
1
s T d''o
Σ
−
X d' − X d''
( X d' − X l ) * *2
''
d
'
d
− X
− X
l
l
+
X − X
X − Xl
'
d
'
d
X
''
d
'
d
+
Pd''
Σ
− Xl
d − AXIS
S e Pfd
+
+
Σ
+
+
Σ
X d − X d'
id
+
Lad i fd
−
Σ
−
1
s T q''o
X
Model supported by PSLF
Pq''
Pkd
q
− X
''
q
q − AXIS
iq
Machine Model GENTPF Machine Model GENTPF
Generator represented by uniform inductance ratios rotor
modeling to match WSCC type F
X d − X d'
X d' − X d''
Se
−
+
E fd
−
Σ
−
1
sTdo'
E q'
Se
+
1
sT d''o
Σ
−
X d − X d''
X d' − X d''
X d' − X d''
S e = 1 . + fsa t (ϕ a g
)
Q − A x is S im ila r e x c e p t:
Se = 1. +
Model supported by PSLF
Xq
Xd
(ϕ )
ag
E
ϕ d''
'
q
id
Machine Model GENTRA Machine Model GENTRA
Salient Pole Generator without Amortisseur Windings
E fd
+
Σ
−
1
s T d' o
+
Σ
−
Se
X
'
d
d − AXIS
+
Lad i fd
Σ
+
X
X
Model supported by PSLF
d
− X
id
'
d
q − AXIS
iq
q
Machine Model GENWRI Machine Model GENWRI
Wound-rotor Induction Generator Model with Variable External
Rotor Resistance
PELEC
PM ECH
−
+
fS
R 2T p o =
1
2Hs
÷
Σ
(Ls
− Ll
)
ϕ& fd = −
ϕ& fq
(ϕ
(ϕ
= −
fd
+ S d + ( L s − L ) id
T
fq
'
0
+ S q + ( L s − L' ) iq
T 0'
ϕ
'
d
=ϕ
ϕ
'
q
=ϕ
) + ( s lip )ϕ
) + ( s lip )ϕ
Σ
R 2 is th e in te rn a l ro to r re s is ta n c e
R 2 e x is th e in te rn a l ro to r re s is ta n c e
eq = ω sϕ d' − Li' d − R a iq
fq
ed = −ω sϕ q' + Li' q − R a id
ϕ' =
fd
Sd
fq
Sq
Model supported by PSLF
(ϕ ) + (ϕ )
= f (ϕ )
= S (ϕ )
= S (ϕ )
2
'
d
Se
fd
slip
ω0
th e to ta l ro to r re s is ta n c e .
'
0
'
−
R 2 T p o i s a c o n s t a n t w h i c h i s e q u a l t o T 0' t i m e s
ω 0 ( L s − L' )
R 2T p o
T =
(R 2ex + R 2 )
ωr
+
'
q
'
sat
e
'
d
e
'
d
2
Machine Model GEWTG Machine Model GEWTG
Generator/converter model for GE wind turbines –
Doubly Fed Asynchronous Generator (DFAG) and
Full Converter (FC) Models
E q'' cm d
( efd )
From
exwtge
−1
X ''
1
1 + 0.02s
H ig h V o ltag e
R eactive C u rren t
M an ag em en t
I sorc
s0
LVLP & rrpwr
I Pcmd
( ladifd )
From
exwtge
1
1 + 0.02s
I Plv
L o w V o ltag e
A ctive C u rren t
M an ag em en t
s1
LVPL
1.11
V
LVPL
V
xerox
(0.5pu)
1
1 + 0.02s
Vterm
s2
brkpt
(0.9pu)
LowVoltage Power Logic
Figure 1. DFAG Generator / Converter Model
Model supported by PSLF
jX ''
Machine Model GEWTG
Generator/converter model for GE wind turbines –
Doubly Fed Asynchronous Generator (DFAG) and
Full Converter (FC) Models
E q'' cm d
( efd )
From
exwtge
1
1 + 0.02s
−1
H ig h V o ltag e
R eactive C u rren t
M an ag em en t
s0
LVLP & rrpwr
I Pcmd
( ladifd )
From
exwtge
1
1 + 0.02 s
I Plv
L o w V o ltag e
A ctive C u rren t
M an ag em en t
s1
LVPL
1.11
V
LVPL
V
xerox
(0.5pu)
1
1 + 0.02 s
Vterm
s2
brkpt
(0.7pu)
LowVoltage Power Logic
Figure 1. Full Converter Generator / Converter Model
Model supported by PSLF
I sorc
Machine Model MOTOR1 Machine Model MOTOR1
“Two-cage” or “one-cage” induction machine
ψ dr 2
+
Σ
−
ψ dr 1
+
Σ
−
ω o S L IP
ω o Rr 2
L lr 2
L m = L s − Ll
−
+
Σ
+
Σ
−
ψ qr 2
+
Σ
Model supported by PSLF
−
L'm = 1. / (1. / L m + 1. / L lr 1 ) = L' − L l
1.
L lr 2
L''m = 1. / (1. / L m + 1. / L lr 1 + 1. / L lr 2 ) = L'' − L l
T o' = L lr 1 L m / (ω o R r 1 L'm ) = ( L lr 1 + L m ) / (ω o R r 1 )
T o'' = L lr 2 L'm / (ω o R r 2 L''m ) = ( L lr 2 + L'm ) / (ω o R r 2 )
ω o S L IP
ω o Rr1
L lr 1
+
+
Σ
ψ qr 1
+
1.
L lr 1
Σ
+
L
− E d'' = ψ q''
''
m sa t
ψ mq
K sat = 1. + S e (ψ m )
Se
ψ m2 d + ψ m2 q
ψ qr 1
ψ qr 2
ψm
ψ md
+
−
L''m
sa t
Σ
−
L''m
sa t
L lr 1
+
+
Σ
ψ dr 1
1.
L lr 1
L lr 2
+
Σ
L
+
+
Σ
ψ dr 2
1.
L lr 2
E q'' = ψ
''
m sa t
''
d
+
L''m sat =
ω o S L IP
ω o Rr 2
ids
+
ω o S L IP
ω o Rr1
iqs
Σ
K sat
1.
/ Lm + 1. / Llr1 + 1. / Llr 2
Machine Model SVCWSC Machine Model SVCWSC
Static Var device compatible with WSCC Vx/Wx models
Voltage Clamp Logic
if Vbus<V1vcl, Kvc = 0.
if Vbud>V2vcl for Tdvcl sec., Kvc =1.
V1MAX
VEM AX
VBU S +
Σ
1+sTC
1+sTS1
−
−
Σ
+
+
Σ
1+sTS2
1+sTS3
+
VEM IN
VRET
XC
V1MIN
VSCS + VS
VS (from external PSS)
B MAX
K VC * V 2 MAX
1+sTS4
1+sTS5
KSVS
F ast
O ver
R id e
1
1+sTS6
B MIN
K VC * V 2 MIN
π
Input 1
KS1
1+sTS7
1 + sT8
1 + sTS 9
VSCSM AX
+
Σ
+
Input 2
KS2
1+sTS10
Model supported by PSLF
1+sT11
1+sTS12
sTS13
1+sTS14
VSCS
KS3
VSCSM IN
BSVS
Generator Other Model LCFB1 Turbine Load Controller Model LCFB1
Freq
1.0
−
+
Σ
KP
Lrmax
Fb
Pmwset +
1
−
Σ
−
e M AX
− db
− e M AX
db
1
1 + sTPELEC
Pgen
Frequency Bias Flag - fbf, set to 1 to enable or 0 to disable
Power Controller Flag - pbf, set to 1 to enable or 0 to disable
States
1 - Pelec Sensed
2 - KI
Model supported by PSLF
K1
s
− Lrmax
2
+
+
Lrmax
+
Σ
− Lrmax
Σ
+
Pref 0
Pref
Governor BPA GG Governor BPA GG
WSCC Type G Governor Model
PM O
K1' Δω
1 + sT2
1 + sT1
+
2
−
Σ
PM AX
States
1 - Pmech
2 - Lead-Lag 1
3 - Integrator 3
4 - Integrator 4
Model in the public domain, available from BPA
1
1 + sT3
3
1
1 + sT4
4
1 + sFT5
1 + sT5
1
PM
+
Pe
Σ
−
PM -Pe
Governor BPA GH Governor BPA GH
WSCC Type H Hydro-Mechanical Governor Turbine Model
PILOT VALVE
P0 XR
−
1
TG (1+ sTP )
Σ
−
3
1
s
PMIN =0
P& DOWN
Σ
+
R
+
SDdTd
1+ sTd
States
1 - Pmech
2 - P gate valve
3 - y3
4 - Feedback
Model in the public domain, available from BPA
TURBINE
PMAX(P.U.)
P& UP
+
K1' Δω
GATE SERVO
4
2
1− sTW
1+ sTW /2
1
PM
Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and BPA GLTB Governor BPA GIGATB, BPA GJGATB, BPA GKGATB, and
BPA GLTB
No block diagrams have been created
Governor BPA GSTA Governor BPA GSTA
WSCC Type S Steam System Governor
And Nonreheat Turbine (Type A) Model
P0
K1Δω
1+ sT2
1+ sT1
P& UP
+
3
−
Σ
−
1
s
1
T3
P& DOWN
States
1 - Pmech
2 - P gate valve
3 - Lead-lag
Model in the public domain, available from BPA
PMAX(P.U.)
PMIN(P.U.)
2
PGV
1
1 + sTCH
1
PM
Governor BPA GSTB Governor BPA GSTB
WSCC Type S Steam System Governor and Tandem Compound
Single Reheat Turbine (Type B) Model
P0
K1Δω
1 + sT2
1 + sT1
P& UP
+
2
−
Σ
−
PMAX(P.U.)
1
s
1
T3
P& DOWN
+
1
PMIN(P.U.)
Σ
+
+
FHP
2 - Lead-lag
3 - y3
1
1 + sTCH
3
FIP
4 - y4
5 - y5
Model in the public domain, available from BPA
1
1 + sTRH
4
Σ
+
FLP
States
1 - P gate valve
PGV
1
1 + sTCO
5
PM
Governor BPA GSTC Governor BPA GSTC
WSCC Type S Steam System Governor and Tandem Compound
Double Reheat Turbine (Type C) Model
P0
K1Δω
1 + sT2
1 + sT1
+
2
−
PMAX(P.U.)
P& UP
Σ
−
1
1
s
1
T3
P& DOWN
+
PMIN(P.U.)
Σ
+
+
FVHP
PGV
Σ
+
+
FHP
+
FIP
FLP
States
1 - P gate valve
2 - Lead-lag
3 - y3
1
1 + sTCH
3
4 - y4
5 - y5
6 - y6
Model in the public domain, available from BPA
1
1 + sTRH1
4
1
1 + sTRH 2
5
Σ
1
1 + sTCO
6
PM
Governor BPA GWTW Governor BPA GWTW
WSCC Type W Hydro Governor System
And Hydro Turbine (Type W) Model
P0
KΔω
1+ sT2
(1+ sT1)(1+ sT3)
2
3
States
1 - Pmech
2 - y0
3 - y1
Model in the public domain, available from BPA
PMAX/100
+
−
PGV
Σ
PMIN/100
1− sTW
1+0.5sTW
1
PM
Governor CCBT1 Governor CCBT1
Steam Plant Boiler/Turbine and Governor Model
7
1
1 + sTW
1
1 + sTF
6
M IN4
−
+
Σ
+
Σ
K P7 +
Σ
K P3 +
−
+
Press ref
Σ
Σ
π
4
M AX5
Σ
2
Plmref •Press ref
TPLM = 50 VMIN
0
MAX1
-1
K
K P1 + I 1
s
3
1r
Model supported by PSLF
Σ
+
−
rvalve
+
−
rpelec
−
ωref
1.0
KB
+
-dbd
+dbd
13
−
Speed
M AX6
L ref
1
1 + sTPelec
K IGOV
s
Σ
+
11
+
+
+
Pgen
15
K PGOV +
MIN1
M IN5
1.0 −
1
Σ
−
KP6 +
Speed
Proportional-integral blocks 1-6 also have rate limits not shown in the block diagram
KI 6
s
M IN6
Σ
Σ
Pmech
VMAX
1
1 + sTG
10
K
K P5 + I 5
s
+
ah
12
K
KP2 + I 2
s
M IN2
KI 3
s
−
K PLM
1 + sTPLM
MAX2
MIN3
Σ
+
M IN7
+
Σ
1 − ah
1
sTRH
π
M AX3
5
+
−
Bias
sK D 7
1 + sTD 7
+
Σ
−
−
14
+
Pmech
−
π
+ Σ
M AX7
KI 4
s
Σ
9
1
sTD
KP
MAX4
KP4 +
8
−
+
Σ
+
−
Valve Bias
Governor CRCMGV Governor CRCMGV
Cross Compound Turbine-Governor Model
R eference
PM AX(HP)
Speed (HP)
1/ R( HP )
1 + sT1( HP )
1 +
−
1+ sF(HP)T5(HP)
Σ
(1+ sT )(1+ sT )(1+ sT )
3( HP)
0
4( HP)
High-Pressure Unit
(D
H ( HP)
)(E )
−
5( HP)
3
2
+
Σ
Pmech(HP)
Σ
Pmech(LP)
4
2
T −HP
R eference
Speed (LP)
−
States
1 - HPInput
2 - HPState1
3 - HPState2
+
Σ
PM AX(LP)
1/ R( LP )
1 + sT1( LP )
1+ sF(LP)T5(LP)
5 +
−
Σ
0
(1+ sT )(1+ sT )(1+ sT )
3( LP)
4( LP)
6
Low -Pressure U nit
4 - HPState3
5 - LPInput
6 - LPState1
7 - LPState2
8 - LPState3
Model supported by PSLF and PSSE
7
( −D ) ( E )
H ( LP)
5( LP)
T −HP
8
2
+
−
Governor DEGOV Governor DEGOV
Woodward Diesel Governor Model
TMAX
Δω
Speed
− (1 + sT3 )
1 + sT1 + s 2T2T1
144244
3
Electric Control Box
1
2
K (1 + sT4 )
s (1 + sT5 )(1 + sT6 )
TMIN
144
42444
3
Actuator
3
States
1 - Control box 1
2 - Control box 2
3 - Actuator 1
4 - Actuator 2
5 - Actuator 3
Model supported by PSSE
4
5
1+Speed
e
− sTD
{
Engine
π
Pmech
Governor DEGOV1 Governor DEGOV1
Woodward Diesel Governor Model
Pref
Δω
Speed
+
−
Σ
−
TM AX
− (1 + sT3 )
1 + sT1 + s 2T2T1
144244
3
Electric Control Box
1
2
1+Speed
K (1 + sT4 )
s (1 + sT5 )(1 + sT6 )
e
T
4
5
0
DROOP
1 - Control box 1
2 - Control box 2
3 - Actuator 1
4 - Actuator 2
5 - Actuator 3
6 - Droop Input
Model supported by PSSE
Droop C ontrol
6
1
States
Pmech
{
Engine
MIN
144
42444
3
Actuator
3
π
− sTD
1
1+ sTE
SBASE
MBASE
Pelec
Governor G2WSCC Governor G2WSCC
Double Derivative Hydro Governor and Turbine
Represents WECC G2 Governor Plus Turbine Model
Pref
Δω
(Speed)
2
1
1+ sTD
eps
db1
sK1
1 + sTF
3 +
+
Σ
+
−
+
Σ
−
s2 K2
(1+ sTF )2
4
VEL OPEN
+
Σ
−
KG
1+ sTP
VEL CLOSE
8
KI
s
6
(TT =0)
R
5
7
1
1+ sTT
Pelec
States
1 - Pmech
PMAX
1
s
2 - TD
PGV
GV
9
db2
PMIN
N GV
1 + s A tu r b T tu r b
1 + s B t u r b T tu r b
1
Pmech
3 - K1
4 - K 2 first
5 - K 2 second
6 - Integrator
7 - Pelec Sensed
Model supported by PSLF
GV1, PGV1...GV6, PGV6 are the x,y coordinates of NGV block
8 - Valve
9 - Gate
Governor GAST_GE Governor GAST_GE
Gas Turbine-Governor Model
5
1
1+ sTLTR
−
if (D V >L INC ) R LIM =L TRAT
else
Pref
KA (1+ sT4 )
1+ sT5
Σ
R LIM =R MAX
Σ
DV
+
−
1
LV
GATE
+
VMAX
R LIM
Σ
1
R
1
sT1
2
+
−
VMIN
FIDLE
+
+
Σ
−
KT
eps
db 0
L MAX
Σ
1+ AsT2
1+ BsT2
3
PG V
dbb
Pmech
GV
FIDLE
Σ
−
4
+
1
1+ sT3
States
1 - Input LL
Δω
(Speed)
2 - Integrator
3 - Governor LL
Model supported by PSLF
4 - Load Limit
GV1, PGV1...GV6, PGV6 are the x,y coordinates of PGV vs. GV block
5 - Temperature
Governor GAST_PTI Governor GAST_PTI
Gas Turbine-Governor Model
Speed
D turb
1
R
VMAX
−
Load ref
+
Σ
1
1
1+ sT1
LV
Gate
1
1+ sT2
VMIN
Σ
+
KT
+
+
States
1 - Fuel Valve
2 - Fuel Flow
3 - Exhaust Temperature
Model supported by PSSE
Σ
A T (Load Limit)
−
3
1
1+ sT3
2
−
+
Σ
Pmech
Governor GAST2A Governor GAST2A
Gas Turbine-Governor Model
States
1 - Speed Governor
MAX TC
2 - Valve Positioner
3 - Fuel System
Temperature
Control*
4 - Radiation Shield
5 - Thermocouple
6 - Temp Control
7 - Turbine Dynamics
+
R eference
Σ
−
+
1+ sT5
sτT
Σ
−
Thermocouple
Radiation
Shield
1
1+ sT4
K
K4 + 5
1+ sT3
5
6
MIN
1
Speed
Governor
K6
Fuel
Control
Low
Value
Select
π
f1
e−sT
K3
+
+
Σ
−
Turbine
Exhaust
w f1
4
MAX
W ( sX +1)
sY + Z
Turbine
Valve
Positioner 2
A
C + sB
Speed
Control
e−sETD
Fuel
System 3 Wf
Fuel
Flow
1
1+ sτ F
e−sECR
KF
Gas Turbine
Dynamics
7
Δω
1.0 +
Model
Pmech
Turbine
π
TRATE
MBASE
1
1+ sTCD
w f2
f2
+
Σ
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
⎛
⎞
f 2 =A f2 -B f2 w f2 -C f2 Speed
f1 =TR -A f1 ⎜ 1.0-w ⎟ -B f1 Speed
supported by PSSE
f1 ⎠
⎝
(
)
(
)
(
)
Governor GASTWD Pelec
Governor GASTWD
Woodward Gas Turbine-Governor Model
SBASE
TRATE
MAX
Pe
Temperature
Control*
KDROOP
1+ sTD
sT5 +1
sτT
MAX
Σ
+
Thermocouple
Radiation
Shield
1
1+ sT4
K
K4 + 5
1+ sT3
−
5
Turbine
Exhaust
w f1
e−sETD
TC Setpoint for
T em perature C ontrol
KP
+
f1
4
6
1
Speed
Reference
Turbine
−
+
KI
s
Σ
−
+
Σ
+
K6
Fuel
Control
π
Low
Value
Select
K3
e−sT
+
+
Σ
−
Valve
Positioner
A
C + sB
Speed
Control
sK D
2
Fuel
System 3 W
f
Fuel
1
Flow
1+ sτ F
KF
7
States
1 - Power Transducer
MIN
8
9
Δω
Pmech
2 - Valve Positioner
3 - Fuel System
4 - Radiation Shield
5 - Thermocouple
6 - Temp Control
1.0 +
e−sECR
Turbine
TRATE
MBASE
π
f2
w f2
1
1+ sTCD
Gas Turbine
Dynamics
+
Σ
7 - Turbine Dynamics
8 - PID 1
9 - PID 2
* Temperature control output is set to output of speed governor when temperature control input changes from positive to negative
Model supported by PSSE
(
)
f =T -A 1.0-w
-B ( Speed )
1 R f1
f1
f1
(
)
f =A -B
w
-C ( Speed )
2
f2 f2
f2
f2
Governor GGOV1 Governor GGOV1 – GE General Governor-Turbine Model
If D m > 0, (Speed)
L dref
( Ldref / K turb ) + w fnl
If D m < 0, (Speed+1)
+
Σ
6
−
1
1 + sTFload
10
Dm
**D m
1 + sTSA
1 + sTSB
−
Σ
π
+
K Pload
K Iload
s
aset
Speed
s
−
1 + sTA 9
7
+
+
K A Δt
+
K Pgov
−
Pref +
+
Σ
+ 1.1r
8
1
Σ
Pelec
minerr
−
s
−1
1 Rselect
1 + sTDgov
e
Σ
3
+
VMAX
VM AX
+
sK Dgov
−2
-1.1r
+
−
db
r
K IMW
s
Pmwset
K Igov
-db
Low
Value
Select
+
maxerr
Σ
Σ
Σ
5
1 + sTC
1 + sTB
1.0
Timestep
+
Σ
+
Pmech
VM IN
1
1 + sTACT
VMIN
2
governor output
valve stroke
1
1 + sTPelec
− sTeng
Kturb
4
π
+
Σ
−
Flag
0
1
w fnl
1.0 (Speed+1)
States
1 - Pelec Measured
5 - Turbine LL
2 - Governor Differential Control 6 - Turbine Load Limiter
3 - Governor Integral Control
7 - Turbine Load Integral Control
Model supported by PSLF
4 - Turbine Actuator
Model supported by PSSE does not include non-windup limits on K IMW block
9 - Accel Control
R UP , R DOWN , R CLOSE , and R OPEN inputs not implemented in Simulator
10 - Temp Detection LL
8 - Supervisory Load Control
Governor GGOV2 Governor GGOV2 - GE General Governor-Turbine Model
If D m > 0, (Speed)
L dref
( L dref / K turb ) + w fnl
If D m < 0, (Speed+1)
+
Σ
s5
Kpload
1
3
2
6
5
4
+
+
Kiload
s
aset
s6
−
s
1+ sTa
Speed
Σ
Pref +
+
Σ
+
1.1r
Pmwset
+
PELEC
minerr
−
s
Σ
s2
+
+
sKdgov
1+ sTdgov
−2
−1
Rselect
1
1 + sT P elec
s0
Model supported by PSLF
1+ sTc
1+ sTb
fsrt
Frequencydependent
limit
fsra
−sTeng
e
Low
Value
VM AX
Select
ropen
vmax
K turb
π
1
1+ sTact
fsrn
VM IN
vmin
rclose
s1
governor output
1
Σ
db
r
s7
+
Kigov
-db
−
Kimw
s
-1.1r
Kpgov
maxerr
Σ
Σ
+
s8
−
+
KaΔt
PMECH
+
Speed
Timestep
+
Σ
s9
1.0
Σ
−
π
1+ sTsa
1+ sTsb
1
1+ sTfload
−
Dm
**D m
valve stroke
+
Σ
−
s3
Flag
0
1
1.0 (Speed+1)
w fnl
s4
Governor GGOV3 Governor GGOV3 - GE General Governor-Turbine Model
If D m > 0, (Speed)
L dref
( L dref / K turb ) + w fnl
If D m < 0, (Speed+1)
+
Σ
6
−
10
1
1+ sTfload
Dm
**D m
−
5 +
π
1+ sTsa
1+ sTsb
1+ sTc
1+ sTb
Kpload
7
Kiload
s
aset
−
s
1+ sTa
9
Σ
+
KaΔt
Pref +
Σ
+
8
+
1.1r
Σ
PELEC
−
Kigov
s
sKdgov
−2
1
Σ
Minerr
R
-1.1r
+
db
−
Kimw
s
Pmwset
-db
−1
Rselect
1
1
1 + sT P elec
e
+
3
+
K turb
Σ
+
M a x e rr
−sTeng
+Σ
Kpgov
−
1.0
Timestep
+
Percieved
Speed
+
11
Low
Value
VM AX
Select
1
1+ sTact
+
VM IN
2
1+ sTcd
1+ sTbd
VMAX
Σ
VMIN
1+ sTdgov
governor output
States
1 - Pelec Measured
Σ
PMECH
4
π
+
Flag
0
1
Σ
−
w fnl
1.0 (Speed+1)
valve stroke
5 - Turbine LL
9 - Accel Control
2 - Governor Differential Control 6 - Turbine Load Limiter
10 - Temp Detection LL
3 - Governor Integral Control
7 - Turbine Load Integral Control 11 - Fuel System Lead Lag
4 - Turbine Actuator
8 - Supervisory Load Control
Model supported by PSLF
dnrate, RUP , RDOWN , RCLOSE , and ROPEN inputs not implemented in Simulator
Governor GGOV3 - GE General Governor-Turbine Model
slope = 1
dnhi
Measured
Speed
Filtered
Speed
ffa
ffb
slope = ffc
Nonlinear Speed Filter
Model supported by PSLF
Rate limit dnrate not used in Simulator
Percieved
Speed
dnlo
Governor GPWSCC Governor GPWSCC
PID Governor-Turbine Model
KP
Pref
Δω
(Speed)
+
err
−
db1
1
1+ sTD
Σ
−
2
K1
s
3
Σ
+
−
KG
1+ sTP
VEL CLOSE
CV
Σ
Tt = 0
+
4
sKD
1+ sTf
VEL OPEN
+
+
R
(Tt > 0)
5
Pelec
1
1+ sTt
PMAX
6
1
s
7
PGV
GV
db2
N GV
1 + s A tu r b T tu r b
1 + s B t u r b T tu r b
1
Pmech
PMIN
States
Model supported by PSLF
GV1, PGV1...GV6, PGV6 are the x,y coordinates of NGV block
1 - Pmech
5 - Pelec Sensed
2 - TD
6 - Valve
3 - Integrator
7 - Gate
4 - Derivative
Governor HYG3 Governor HYG3
PID Governor, Double Derivative Governor, and Turbine
Pref
Δω = (speed-1)pu
R g a te
States
1 - TD
K2
+
Δω
−
db1
−
Σ
1
1+ sTD
−
7
R e le c
1
1+ sTt
1
1+ sTD
Δω
db1
1
Pelec
2 +
sK1
1+ sTf
(1+ sT )
Σ
−
KG
1+ sTP
Σ
3 - Ki
+
cflag>0
+
Σ
+
−
−
8
R g a te
9
4 - Valve
5 - Gate
6 - TW
2
+
2
f
+
2 - K1
Pref
1
VEL OPEN
+
sK1
1+ sTf
s2 K2
CV
+
3
KI
s
3
KI
s
Σ
7 - Pelec Sensed
cflag<0
8 - K 2 First
9 - K 2 Second
−
R e le c
7
1
1+ sTt
Pelec
CV
PMAX
4
5
1
s
GV
db2
π
PMIN
VEL CLOSE
Δω
D tu r b
PG V
N GV
GV
Model supported by PSLF
PGV
÷
q/PGV
π
−
H
H0
Σ
+
1
sTW
q 6 +
Note: cflag determines numbering of states
Σ
−
qNL
π
−
A
+
t
Σ
Pmech
GV1, PGV1...GV6, PGV6 are the x,y coordinates of NGV block
Governor HYGOV Governor HYGOV
Hydro Turbine-Governor Model
Pref
Δω
db1
1 + sTn
1 + sTnp
G MAX
+
−
−
1
1+ sTf
1 + sTr
rTr s
1
1+ sTg
2
3
Δω
G MIN
R
PG V
1
rate limit - Velm
D turb
db2
π
GV
N GV
G Vg
PGV
÷
q/PGV
π
H
−
Σ
+
Hdam=1
1
sTW
4
+
Σ
−
qNL
π
−
At
+
Σ
Pmech
States
1 - Filter Output
2 - Desired Gate
3 - Gate
4 - Turbine Flow
Model supported by PSSE and PSLF
Rperm shown as R, Rtemp shown as r
GV0, PGV0...GV5, PGV5 are the x,y coordinates of N GV block
Ttur, Tn, Tnp, db1, Eps, db2, Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator
Governor HYGOV2 Governor HYGOV2
Hydro Turbine-Governor Model
Pref
Δω
Speed
1
K I + sK P
s
VGM AX
+
−
Σ
−
−
⎛ 1 + sT1 ⎞
KA ⎜
⎟
⎝ sT3 ⎠
2
1 + sT2
1 + sT4
3
-VGM AX
G MAX
1
s
5
G MIN
4
sR tem p T R
R
Pmech
PM AX
6
1 + sT R
1 − sT5
1 + sT6
States
1 - Filter Output
2 - Governor
3 - Governor Speed
4 - Droop
5 - Gate
6 - Penstock
The G MAX G MIN limit is modeled as non-windup in PSSE but as a windup limit in Simulator.
Model supported by PSSE
Governor HYGOV4 Governor HYGOV4
Hydro Turbine-Governor Model
Pref
+
−
db1
Δω
PMAX
UO
1
1+ sTp
Σ
−
Σ
1
Tg
1
1
s
UC
+
2
db2
PMIN
Rperm
+
3
π
sTr Rtemp
1 + Tr s
GV
D turb
PG V
N GV
PGV
÷
q/PGV
π
H
Hdam
−
Σ
+
GV
1
sTW
4
q
+
Σ
−
qNL
π
−
At
+
Σ
Pmech
States
1 - Velocity
2 - Gate
3 - Rtemp
Bgv0...Bgv5, Bmax, Tblade not implemented in Simulator
GV0, PGV0...GV5, PGV5 are the x,y coordinates of N GV block
Model supported by PSLF
4 - TW
Governor HYST1 Governor HYST1
Hydro Turbine with Woodward Electro-Hydraulic PID Governor,
Surge Tank, and Inlet Tunnel
Σ
Pgen
1+ sTreg
+ 1
−
Σ
Pref
−
Rperm
Δω
+
Kp +
Ki
s
2
1
1+ sTa
4
+
1
1+ sTa
Σ
+
5
3
sKd
1+ sTa
G MAX
PG V
1
1 + sTb
6
G(s)
8
9
G MIN
GV
D turb
Not yet implemented in Simulator
Model supported by PSLF
7
+
Σ
−
Pmech
Governor IEEEG1 Governor IEEEG1
IEEE Type 1 Speed-Governor Model
Δω
SPEED HP
+
+
+
db1
Pref
K (1 + sT2 )
1 + sT1
Σ
2
−
+
Σ
−
PMAX
UO
1
T3
1
s
UC
3
PGV
1
K1
K3
1
1 + sT5
1
1 + sT4
db2
4
Σ
+
+
K5
5
1
1 + sT6
PM ECH HP
Σ
+
6
PM1
K7
1
1 + sT7
GV
PM IN
K2
K4
+
States
1 - Governor Output
2 - Lead-Lag
+
Σ
3 - Turbine Bowl
4 - Reheater
5 - Crossover
6 - Double Reheat
Model supported by PSLF includes hysteresis that is read but not implemented in Simulator
Model supported by PSSE does not include hysteresis and nonlinear gain
GV1, PGV1...GV6, PGV6 are the x,y coordinates of PGV vs. GV block
K6
+
+
Σ
K8
+
Σ
+
PM ECH LP
PM2
Governor IEEEG2 Governor IEEEG2
IEEE Type 2 Speed-Governor Model
Pref
Δω
Speed
K(1+ sT2 )
(1+ sT1)(1+ sT3 )
+
2
3
−
PMAX
1− sT4
1+ 0.5sT4
Σ
1
Pmech
PM IN
States
1 - Pmech
2 - First Integrator
3 - Second Integrator
Model supported by PSSE
Governor IEEEG3_GE Governor IEEEG3_GE
IEEE Type 3 Speed-Governor Model IEEEG3
PR EF
Δω
Speed
−
db1
UO
+
1
1 + sTP
Σ
−
Σ
2
1
TG
1
s
UC
+
PMAX
PGV
3
PGV
GV
db2
PM IN
KTURB (1 + ATURB sTW )
1 + BTURB sTW
Pmech
1
GV
RPERM
+
4
RT E M P sT R
1 + sT R
States
1 - Pmech
PSLF model includes db1, db2, and Eps read but not implemented in Simulator
Model supported by PSLF
2 - Servomotor position
3 - Gate position
4 - Transient droop
Governor IEEEG3_PTI Governor_IEEEG3_PTI
IEEE Type 3 Speed-Governor Model IEEEG3
PR EF
Δω
Speed
−
UO
+
PMAX
1
TG (1 + sTP )
Σ
−
UC
Σ
+
1
s
2
PM IN
3
⎡ ⎛
a a ⎞ ⎤
a23 ⎢1+ ⎜ a11 − 13 21 ⎟ sTW ⎥
a23 ⎠ ⎦
⎣ ⎝
1+ a11sTW
1
Pmech
RPERM
+
4
RTEMPsTR
1+ sTR
States
1 - Pmech
2 - Servomotor position
3 - Gate position
4 - Transient droop
Model supported by PSSE
Governor IEESGO Governor IEESGO
IEEE Standard Model IEEESGO
PO
Speed
K1(1+ sT2 )
(1+ sT1)(1+ sT3 )
+
1
2
−
Σ
PMAX
PMIN
1
1+ sT4
3
+
1− K2
+
Σ
Pmech
+
1− K2
K2
1+ sT5
4
K3
1+ sT6
5
States
1 - First Integrator
2 - Second Integrator
3 - Turbine T4
4 - Turbine T5
Model supported by PSSE
5 - Turbine T6
Governor PIDGOV Governor PIDGOV - Hydro Turbine and Governor Model PIDGOV
Σ
+
0
Feedback signal
PR EF
− 1
Rperm
Pelec
SBASE
MBASE
1+ sTreg
States
1 - Mechanical Output
2 - Measured Delta P
2
3 - PI
+
Δω
Speed
−
Σ
Kp +
Ki
s
3
1
1+ sTa
4
+
1
1+ sTa
Σ
+
4 - Reg1
6
5 - Derivative
6 - Reg2
7 - Gate
5
sKd
1+ sTa
Vel MAX
+
Σ
−
1
Tb
G MAX
Power
1
s
3
7
2
1
Vel MIN G
MIN
Gate
1− sTZ
1+ sTZ 2
1 +
TZ = ( A tw ) *Tw
Σ
Pmech
−
D turb
Model supported by PSLF
Model supported by PSSE
(G0,0), (G1,P1), (G2,P2), (1,P3) are x,y coordinates of Power vs. Gate function
Governor TGOV1 Governor TGOV1
Steam Turbine-Governor Model TGOV1
VMAX
PR EF
+
Σ
−
1
R
1
1+ sT1
2
1+ sT2
1+ sT3
1
+
Σ
Pmech
−
VMIN
Δω
Speed
Dt
States
1 - Turbine Power
2 - Valve Position
Model supported by PSLF
Model supported by PSSE
Governor TGOV2 Governor TGOV2
Steam Turbine-Governor with Fast Valving Model TGOV2
K
VMAX
Reference
+
Σ
−
1
1+ sT1
1
R
1− K
1+ sT3
1
v
1+ sTt
2
3 +
4
+
Σ
PM ECH
−
VMIN
Δω
Speed
Time to initiate fast valving.
TA :
Intercept valve, v , fully closed TA
seconds after fast valving initiation.
TB :
Intercept valve starts to reopen TB
seconds after fast va lving initiation.
TC : Intercept valve again fully open TC
seconds after fast valving initiation.
Intercept Valve Position
TI :
Dt
TC
TB
TA
1.
0.
TI
(T
I
+ TA
) (T
I
+ TB
) (T
Time, seconds
Model supported by PSSE
I
+ TC
)
States
1 - Throttle
2 - Reheat Pressure
3 - Reheat Power
4 - Intercept Valve
Governor TGOV3 Governor TGOV3
Modified IEEE Type 1 Speed-Governor with Fast Valving Model
+
Σ
+
+
1
K(1+ sT2 ) −
1+ sT1
+
Σ
−
1
T3
1
s
UC
TI :
Time to initiate fast valving.
TA :
Intercept valve, v , fully closed TA
seconds after fast valving initiation.
TB :
Intercept valve starts to reopen TB
seconds after fast va lving initiation.
TC : Intercept valve again fully open TC
seconds after fast valving initiation.
1
1+ sT4
2
3 +
Σ
−
PM IN
Intercept Valve Position
Δω
Speed
UO
PRMAX
K1
PMAX
1 4
v
sT5
6
0.8
K3
1
1+ sT6
0 0.3
Intercept Valve
Position
TC
TB
States
1 - LL
2 - StateT3
TA
1.
0.
TI
(T
I
+ TA
) (T
I
+ TB
) (T
Time, seconds
Model supported by PSLF
Model supported by PSSE
+
K2
Flow
PR EF
PM ECH
Σ
I
+ TC
)
3 - StateT4
4 - StateT5
5 - StateT6
6 - Intercept Valve
Gv1,Pgv1 ... Gv6, Pgv6 are x,y coordinates of Flow vs. Intercept Valve Position function
5
Governor TGOV5 Governor_TGOV5 - IEEE Type 1 Speed-Governor Model Modified to Include Boiler Controls
+
V MAX
−
K(1+ sT2 )
1+ sT1
Δω
SPEED HP
−
Σ
+
Δf
1
T3
UC
−
Σ
+
MW
D em and
+
Desired
MW
C2
+
Σ
+
K13
K12
+
PSP
Σ
Σ
π
−
+
Σ
R M IN
3
4
5
Model supported by PSSE
K6
+
Σ
+
+
PSP
π
PE
Σ
+
Σ
+
−sTD
e
(1+ sTF )(1+ sTW )
PT
−
1
sCB
C MIN
Fuel Dynamics
+
PM 2
+
KI (1+ sTI )(1+ sTR )
s (1+ sTR1 )
6
Σ
π
PT
C MAX
Dead Band
K11
K8
+
ms
PO
DPE
Desired
MW
1
1+ sT7
Σ
− DPE
PO
2
K7
PM 1
PMECH LP
LMIN
KL
C3
1
K5
1
s
K14
PE
(Pressure Error)
π
+
R M AX
−
K3
+
LMAX
Σ
+
K4
+
PMECH HP
+
1
1+ sT6
K2
−
Σ
+
+
1
1+ sT5
ms
V MIN
KMW
1+ sTMW
PELEC
1
1+ sT4
π
1
s
PO
B
K1
UO
Σ
+
+
Σ
K10
−
Σ
+
PD
−
C1
K9
−
Σ
+
ms
Governor URGS3T Governor URGS3T
WECC Gas Turbine Model
1
1 + sTLTR
5
States
1 - Input LL
2 - Integrator
3 - Governor LL
−
If (D V >L INC ), then R LIM = LTRAT
else, R LIM = R MAX
DV
Σ
+
4 - Load Limit
5 - Temperature
Pref
+
Σ
−
err
db1
−
K a (1 + sT4 )
1 + sT5
+
LV
GATE
R LIM
FIDLE
3
1
sT1
Σ
1
1
R
VMAX
−
2
+
Σ
−
+
Σ
+
−
L MAX
Speed
Dturb
Model supported by PSSE
GV1, PGV1...GV5, PGV5 are the x,y coordinates of PGV vs. GV block
1 + AsT2
1 + BsT2
FIDLE
VMIN
KT
Σ
+
4
1
1 + sT3
PG V
+
G V
db2
Σ
−
Pmech
Governor WT12T1 Governor WT12T1
Two-Mass Turbine Model for Type 1 and Type 2 Wind Generators
From
WT12A
Model
+
Σ
−
+
+
1
2Ht s
Σ
1
ω base
+
Σ
Dshaft
+
Σ−
−
K shaft
2
s
Damp
+
Σ
+
+
Tmech
−
Σ−
1
2Hg s
Telec
3
Speed
ω base
+
ω base
Σ
−
1
s
4
R otor
angle
deviation
Initial rotor slip
H t =H×H tfrac
H g =H-H t
2H t ×H g ×(2π×Freq1) 2
K shaft =
H×ω 0
Model supported by PSSE
States
1 - TurbineSpeed
2 - ShaftAngle
3 - GenSpeed
4 - GenDeltaAngle
Governor W2301 Governor W2301
Woodward 2301 Governor and Basic Turbine Model
Speed
Ref
Pref
Pelec
Speed
+
+
1
1+ sTp
1
−
Σ
+
Gamma
2
1+ 0.5Rho ⋅ s
Beta ⋅ s(1.05 − Alpha)
Σ
−
PI
Controller
1+ 2Beta ⋅ s
Gmax
Valve Servo
1
1 + sTV
3
+
Σ
−
Gmin
1+ sKtTturb
1+ sTturb
Turbine
4
+
Σ
Pmech
−
gnl
D
States
1 - PelecSensed
Gain, Velamx read but not implemented in Simulator.
Model supported by PSLF
2 - PI
3 - Valve
4 - Turbine
Governor WEHGOV Governor WEHGOV
Woodward Electric Hydro Governor Model
5
sK D
1 + sT D
−
+
Pref
Σ
ERR (*)
1
−
−
0
+
Speed deadband
1
Feedback
signal
7
KP
RpermPE
1 + sT PE
Σ
+
Gmax+DICN
KI
s
0
+
Pilot Valve
Distribution Valve
Gmax+DPV
GTMXOP*Tg
+
1
1
1 + sT P
Σ
−
−
Feedback
signal=1
1 - Pilot Valve
2 - DistributionValve
3 - Gate
Gmax
Feedback
signal=0
3
1
G ate position, g s
Gmin-DICN
States
GTMXCL*Tg
Gmin-DPV
6
2
1
sT D V
4 - Turbine Flow
1
Tg
5 - Derivative
6 - Integrator
Rperm G ate
Pelec
SBASE
M BASE
(*)O u t = 0 if E R R < (S p e e d d e a d b a n d )
O u t = E R R ( I ) − (S p e e d d e a d b a n d ) if E R R > (S p e e d d e a d b a n d )
O u t = E R R ( I ) + (S p e e d d e a d b a n d ) if E R R < − (S p e e d d e a d b a n d )
7 - PelecSensed
Gmin
G overnor and H ydraulic A ctuators
Speed
Dturb
g
Flow
Gate
position, g
G ate
Steady-State
Flow , q ss
÷
q/q ss
π
H
H 0 =1
−
Σ
+
1
sTW
T urbine Flow , q
4
Pm ss
Flow
T urbine D ynam ics
Model supported by PSSE
(Gate 1, Flow G1)...(Gate 5, Flow G5) are x,y coordinates of Flow vs. Gate function
(Flow P1, PMECH 1)...(Flow P10, PMECH 10) are x,y coordinates of Pmss vs. Flow function
π
Pmss
π
+ Σ
−
Pmech
Governor WESGOV Governor WESGOV
Westinghouse Digital Governor for Gas Turbine Model
KP
Reference
Δω
Speed
*
−
+
Σ
−
Pelec
1
1+ sTpe
1
**
1
sTI
+
2
+
Σ
1
(1 + sT1 )(1 + sT2 )
3
Pmech
4
Droop
Digital Control * * *
* Sample hold with sample period defined by Delta TC.
* *Sample hold with sample period defined by Delta TP.
* * *Maximum change is limited to A lim between sampling times .
States
1 - PEMeas
2 - Control
3 - Valve
4 - PMech
Model supported by PSSE
A lim read but not implemented in Simulator
Governor WNDTGE Pdbr
Pelec
+
+
Σ
Wind
Power
Model
Spdw l
Blade
Pitch
θ
1
Governor WNDTGE
Wind Turbine and Turbine Control Model for GE Wind Turbines
Pmech
Rotor
Model
7
8
9
10
ω rotor
Anti-windup on
Pitch Limits
PIMax & PIRat
1 θ cmd
1+ sTp
2
Σ
+
+
PImin & -PIRat
ω+
Σ
− 6
ω ref
ω err
1
1+ s5
Anti-windup on
Power Limits
K pp + Kip / s
Pitch
Compensation
K pc + Kic / s
Wind
1
Wind Pavl
Active Power
Speed
Power
Control
1 + sT pav
(glimv)
Model
(optional)
WTG Ter
Pavf 12
Bus Freq +
p set
1
fbus Frequency
Response
To gewtg
Σ
Auxiliary
Curve
Trip Signal
Signal +
(glimit)
if (fbus < fb OR
(psig)
1
fbus > fc)
fflg
−
Σ
+
π
1
1+ sTpc
apcflg Pmin
Pord
Power Response
Rate Limit
PsetAPC
0
5
PWmin & -PWrat
p stl
1
4 - Pitch Compensation
5 - Power Control
6 - Speed Reference
7 - Mech Speed
8 - Mech Angle
9 - Elect Speed
10- ElectAngle
11- Washout
12- Active Power
PWmax & PWrat
ω
3
States
1 - Pitch
2 - Pitch Control
3 - Torque Control
Pelec
2
−0.67 Pelec
+ 1.42 Pelec + 0.51
K ptrq + Kitrq / s
Pitch Control
Torque
Anti-windup on Pitch Limits
Control
4
Model supported by PSLF
Trip
Signal
Over/Under
Speed Trip
ω
Pmax
plim
+
Σ
−
perr
11
sTW
1 + sTW
+
+
wsho
Σ
Pord
Release
PMAX
if fflg set
Apcflg is set to zero. Limits on states 2 and 3 and trip signal are not implemented. Simulator calculates initial windspeed Spdwl.
Governor WNDTGE
Wind Turbine and Turbine Control Model for GE Wind Turbines
ω0
Two - Mass Rotor Model
Tmech +
Tmech =
+
Pmech
ω mech + ω0
Telec −
Telec =
1
2H
Σ
1
s
7
+
Σ
−
Σ
Σ
1
s
9
Δω
ωelec
2
Ar vw3Cp ( λ,θ )
λ = Kb (ω / vw )
4
4
Cp ( λ,θ ) = ∑∑αijθ iλ j
i =0 j =0
See charts for curve fit values
Model supported by PSLF
Σ
Ktg
Tshaft
+
+
1
2Hg
Wind Power Model
ρ
1 8
s
ω base
1
s
ω base
+
Σ
+
ω0
Pmech =
ω rotor Turbine Speed
ω mech
Dtg
−
−
Pelec
ωelec + ω0
+
ω
10
Generator Speed
Governor WNDTRB Governor WNDTRB
Wind Turbine Control Model
90
BPR M X
Rotor speed
+
ωr
Σ
−
KP (1+ sT1)
1+ sT2
-BPR M X
ω ref
1
s
1
0
2
cos
1
1+ sTa
3
π
Pmech
Pwo
States
1 - Input
2 - Blade Angle (Deg)
Model supported by PSLF
3 - Blade Pitch Factor
Governor WPIDHY Governor WPIDHY
Woodward PID Hydro Governor Model
Per Unit Output
(MBASE)
States
PR EF
PELEC
−
+
Σ
0
(1, P3 )
( G 2 , P2 )
Δω
Speed −
5 - PID3
1.0
( G 0 , 0)
6 - Velocity
7 - Gate
sK D
2
+
+
Σ
3 - PID1
4 - PID2
( G1 , P1 )
G ate Position (pu)
REG
1 + sT REG
1 - Mechanical Output
2 - Measured Delta P
KP
+ Σ
+
3
1
(1 + sT A )
2
4
5
1
1 + sT B
6
Vel M IN
PM AX
G M AX
Vel M AX
1
s
GP
7
G M IN
1 − sTW
T
1+ s W
2
1
PM IN
Ki
s
D
−
+
Σ
PMECH
Model supported by PSSE
Governor WSHYDD Governor WSHYDD
WECC Double-Derivative Hydro Governor Model
Pref
Δω
(Speed)
2
1
1+ sTD
err
db1
3 +
sK1
1+ sTF
Σ
+
+
+
−
Σ
−
KI
s
TT = 0
s2K2
(1+ sTF )
4
VEL OPEN
+
Σ
−
KG
1+ sTP
VEL CLOSE
Model supported by PSSE
8
2
6
R
7
(TT > 0)
1
1+ sTT
Pelec
5
PMAX
1
s
9
PGV
GV
db2
N GV
1 + s A tu r b T tu r b
1 + s B t u r b T tu r b
T r a te
M VA
Pmech
1
PMIN
Inputs GV1, PGV1...GV5, PGV5 are the x,y coordinates of NGV block
States
1 - Pmech
6 - Integrator
2 - TD
7 - Pelec Sensed
3 - K1
8 - Valve
4 - K 2 first
9 - Gate
5 - K 2 second
Governor WSHYGP Governor WSHYGP
WECC GP Hydro Governor Plus Model
KP
Pref
+
Δω
(Speed)
err
−
db1
1
1+ sTD
Σ
−
2
KI
s
+
Σ
−
KG
1+ sTP
VEL CLOSE
6
+
CV
Σ
Tt = 0
+
4
sKD
1+ sTf
VEL OPEN
+
3
R
5
(Tt > 0)
Pelec
1
1+ sTt
PMAX
1
s
PMIN
Model supported by PSSE
GV1, PGV1...GV5, PGV5 are the x,y coordinates of NGV block
PGV
GV
7
db2
N GV
1 + s A tu r b T tu r b
1 + s B t u r b T tu r b
1
T r a te
M VA
Pmech
States
1 - Pmech
5 - Pelec Sensed
2 - TD
6 - Valve
3 - Integrator
7 - Gate
4 - Derivative
Governor WSIEG1 Governor WSIEG1
WECC Modified IEEE Type 1 Speed-Governor Model
GV0
Δω
err
db1
K
1+ sT2
1+ sT1
1
PMAX
UO
+
CV
−
−
2
1
s
1
T3
Σ
UC
+
PGV
GV
db2
N GV
PMIN
Σ
+
Σ
+
Σ
PM ECH HP
PM1
+
+
+
K3
K5
K7
2 - Governor Output
6
3 - Turbine 1
4 - Turbine 2
States
1 - Lead-lag
K1
1
1+ sT4
3
1
1+ sT5
1
1+ sT6
4
1
1+ sT7
5
5 - Turbine 3
K2
Iblock = 1 : if PM IN =0, PMIN =Pinitial
Iblock = 2 : if PM AX =0, PMAX =Pinitial
Iblock = 3 : if PMIN =0, PMIN =Pinitial
: if PMAX =0, PMAX =Pinitial
GV1, PGV1...GV5, PGV5 are the x,y coordinates of NGV block
Model supported by PSSE
K4
K6
+
+
Σ
K8
+
+
Σ
6 - Turbine 4
+
+
Σ
PM ECH LP
PM 2
Governor WT1T Governor WT1T
Wind Turbine Model for Type-1 Wind Turbines
Pgen
+
Σ
Pmech
From
G enerator
M odel
−
÷
Tacc
1
2H
1
s
−
From
G overnor
M odel
1
To
Generator
M odel and
G overnor
M odel
ω
Damp
Type 1 WTG Turbine One - mass Model
ωt
From
G overnor
M odel
Pmech
÷
−
Tmech
Σ
+
−
1
2Ht
Dshaft
From
G enerator
M odel
Pgen
÷
ωg
Telec +
−
Σ
+
1
2Hg
ω0
1
s
1 Δω
t
Δ ω tg
+
1
s
Σ−
Δ ω tg
Δω g
3
ω0
ωt
Σ
Σ
1
s
States
1 - TurbineSpeed
2 - ShaftAngle
2
K
3 - GenSpeed
4 - GenDeltaAngle
ωg
1
s
4
Type 1 WTG Turbine Two - mass Model
Model supported by PSLF
H t =H×H tfrac
H g =H-H t
2H t ×H g ×(2π×Freq1) 2
K=
H
Governor WT3T Governor WT3T
Wind Turbine Model for Type-3 (Doubly-fed) Wind Turbines
From
G enerator
M odel
Simplified
Aerodynamic M odel
Blade
Pitch
θ
From
Pitch C ontrol
M odel
+
Σ π
Pgen
+
Kaero
−
− Σ
Pmech +
Σ
+
−
÷
Tacc
1
2H
−
1
s
1
ω
T o Pitch
C ontrol M odel
and C onverter
C ontrol M odel
Pmo
θ0
Damp
Type 3 WTG Turbine One - mass Model
When windspeed > rated windspeed, blade pitch initialized to θ =
ωt
Pmech
÷
−
Tmech
Σ
+
−
1
2Ht
Dshaft
Pgen
÷
ωg
Telec
−
+
Σ
+
1
2Hg
ω0
1
s
1 Δω
t
Δ ω tg
+
1
s
Σ−
Δω g
3
ω0
ωt
Σ
Δ ω tg
Σ
Theta 2 ⎛
1 ⎞
⎜1 − 2 ⎟
0.75 ⎝ VW ⎠
1
s
States
1 - TurbineSpeed
2 - ShaftAngle
2
K
3 - GenSpeed
ωg
4 - GenDeltaAngle
1
s
4
Type 3 WTG Turbine Two - mass Model
Model supported by PSLF
H t =H×H tfrac
H g =H-H t
2H t ×H g ×(2π×Freq1) 2
K=
H
Governor WT3T1 Governor WT3T1
Mechanical System Model for Type 3 Wind Generator
Blade
Pitch
From θ
W T 3P1 M odel
+
Σ π
+
Kaero
−
+
Σ
−
Paero initial
1
1+ State 1
Initial θ
Pitch 0
Angle
+
+
Σ
+
−
Σ
Tmech
1
2Ht s
1
Δω t
ω base
Δ ω tg +
+
Σ
−
Dshaft
K shaft
Σ
−
2
s
Damp
+
Σ
+
+
−
Tmech Σ−
Telec
1
2Hg s
3
Δω g
+
ω base
ωg
Σ ω base
−
H t =H×H tfrac
H g =H-H t
2H t ×H g ×(2π×Freq1) 2
K shaft =
H×ω 0
Model supported by PSSE
ω0
Initial rotor slip
1
s
4
R otor
Angle
Deviation
Governor BBGOV1 European Governor Model BBGOV1
PELEC
SW ITC H = 0
SW ITC H ≠ 0
1
1 + sT1
PO
Δω
Speed
f cut
KS
−
−KLS
+
Σ
+
−
f cut
−
K LS
1
s
Σ
+
PM AX
⎛
⎞
1
KP ⎜
⎟
1
+
sT
N ⎠
⎝
sK D
1 + sT D
PM IN
KG
K LS
1
1 + sT4
+
1− K2
+
1− K3
1
2
3
4
5
6
K2
1 + sT5
K3
1 + sT6
Σ
+
PM EC H
Governor IVOGO IVO Governor Model IVOGO
REF
MAX 3
MAX 1
SPEED
+
−
K1 ( A1 + sT1 )
A2 + sT2
Σ
K3 ( A3 + sT3 )
A4 + sT4
K5 ( A5 + sT5 )
A6 + sT6
MAX 5
PMECH
MIN 5
MIN 1
1
2
3
MIN 3
4
5
6
Governor TURCZT Czech Hydro and Steam Governor Model TURCZT
Frequency Bias
BSFREQ +
Power Regulator
f M AX
Σ
−
K KOR
f DEAD
f M IN
KP
+
−
N TREF
dFREF
+
Σ
N TMAX
−
1
1 + sTC
SBASE
M BASE
PELEC
1
sT I
Measuring Transducer
N TMIN
1
1 + sT EH P
Σ
+
KM
Hydro Converter
+
YREG
Σ
−
Frequency Bias
K STAT
s DEAD
G overnor
1
2
3
5
4
6
Steam Unit
HP Part
1
1 + sT H P
Regulation Valves
V MAX
Y REG
+
G MAX
1
TU
Σ
−
V MIN
1
s
SWITCH = 1
K HP
+
Σ
Reheater
1
1 + sT R
+
1 − K HP
1
KM
PM EC H
1
KM
PM EC H
SWITCH = 0
2
G MIN
1
1 + s TH 2
T urbine
−
Σ
+
3
Hydro Unit
Governor URCSCT Combined Cycle on Single Shaft Model URCSCT
Plant
O utput
(MW )
(STOUT C, POUT C)
(STOUT B, POUT B)
(STOUT A, POUT A)
Steam Turbine O utput (M W )
1
2
3
4
5
6
(Steam Turbine Rating,
Steam & Gas Turbine Rating)
Governor HYGOVM Hydro Turbine-Governor Lumped Parameter Model HYGOVM
H LAKE
(V )
H SCH
(V )
Q SCH
TUNNEL
TUNL / A, TUNLOS
QTUN
SCHARE
SURGE
CHAMBER
SCHLOS
H BSCH
Q PEN
PENSTOCK
PENL / A, PENLOS
TURBINE
Hydro Turbine Governor Lumped Parameter M odel
H TAIL
(V )
Governor HYGOVM Hydro Turbine-Governor Lumped Parameter Model HYGOVM
2
Q PEN
At
PENLOS
Q
Gate +
Relief Valve
π
INPUT
O2
÷
2
PEN
2
At
+
O
+
Σ
−
+
Q 2 SCH
H LAKE
−
+
Σ
gv
s PENL A
Σ
−
Q SCH
Σ
+
OUTPUT
Q PEN
H TAIL
−
Q 2 TUN
H SCH
TUNLOS
gv
sTUNL A
π
+
H BSCH
Σ
+
Σ
+
H BSCH
SCHLOS
π
gv
sTUNL A
π
QTUN
−
Q PEN
1
LEGEND :
gv
TUNL/A
SCHARE
PENLOS
FSCH
PENL/A
Gravitational acceleration
Summation of length/cross section of tunnel
Surge chamber cross section
Penstock head loss coeficient
Surge chamber orifice head loss coeficient
Summation of length/cross section of penstock,
scroll case and draft tube
At
O
HSCH
QPEN
QTUN
QSCH
2
3
4
5
6
Turbine flow gain
Gate + relief valve opening
W ater level in surge chamber
Penstock flow
Tunnel flow
Surge chamber flow
Hydro Turbine Governor Lumped Parameter M odel
Governor HYGOVM Hydro Turbine-Governor Lumped Parameter Model HYGOVM
M XJDO R
Jet Deflector
+
Σ
−
1
Tg
1
s
Deflector
Position
M XJD C R
Speed
0.01 +
Governor
Σ
+
G MAX
Speed
Reference
+
−
Σ
−
1+ sTr
rsTr
1
1+ sTf
Gate Servo
M XGTOR or
M XBGOR
+
Σ
−
G MIN
1
Tg
1
s
M XGTCR or
M XBGCR
R
−
RVLVCR +
1
2
Gate
Opening
3
4
5
6
Σ
RVLMAX
1
s
Relief Valve
Relief Valve
Opening
0
LEGEND :
R
r
Tr
Tf
Tg
MXG TOR
MXGTCR
MXBGOR
Permanent droop
Temporary droop
Governor time constant
Filter time constant
Servo time constant
Maximum gate opening rate
Maximum gate closing rate
Maximum buffered gate opening rate
MXBGCR
GM AX
GM IN
RVLVCR
RVLM AX
MXJDOR
MXJDCR
Maximum buffered gate closing opening
Maximum gate limit
Minimum gate limit
Relief valve closing rate
Maximum relief valve limit
Maximum jet deflector opening rate
Maximum jet deflector closing rate
Governor HYGOVT Hydro Turbine-Governor Traveling Wave Model HYGOVT
H SCH
(V )
Q SCH
H LAKE
(V )
TUNNEL
QTUN
SCHARE
SURGE
CHAMBER
SCHLOS
H BSCH
PENSTOCK
Q PEN
TURBINE
H TAIL
(V )
Time
TUNNEL
(TUNLGTH , TUNSPD , TUNARE , TUNLOS )
Tunnel Inlet
Constraint
Surge Chamber
Constraints
⎧
⎪
DELT * ICON (M + 3) ⎨
⎪
⎩
Flows
Heads
VAR(L + 46 )
VAR(L + 66 )
144
42444
3
TUNLGTH / (ICON (M + 2) +1)
Space
VAR(L + 45 + ICON(M + 2)) = QTUN
VAR(L + 65 + ICON(M + 2)) = H BSCH
Hydro Turbine Governor Traveling W ave M odel
Governor HYGOVT Hydro Turbine-Governor Traveling Wave Model HYGOVT
Surge Chamber
QTUN
+
Σ
Q PEN
1
sSCHARE
Q SCH
π
Q 2 SCH
H SCH +
Σ
+
H BSCH
SCHLOS
Time
PENSTOCK
( PENLGTH , PENSPD , PENARE , PENLOS )
Surge Chamber
Constraints
Turbine
Constraint
⎧
⎪
DELT * ICON (M +1) ⎨
⎪
⎩
Flows
Heads
VAR(L + 6 ) = Q PEN
VAR(L + 26 ) = H BSCH
144
42444
3
PENLGTH / (ICON (M ) + 1)
Space
VAR(L + 55 + ICON(M))
VAR(L + 25 + ICON(M))
Hydro Turbine Governor Traveling W ave M odel
Governor HYGOVT Hydro Turbine-Governor Traveling Wave Model HYGOVT
Jet Deflector
+
Σ
−
M XJDO R
1
Tg
1
s
Deflector
Position
M XJD C R
0.01 +
Governor
Speed
+
−
Σ
−
1+ sTr
rsTr
1
1+ sTf
Gate Servo
+
G MAX
Speed
Reference
Σ
M XGTOR or
M XBGOR
+
Σ
−
G MIN
1
Tg
1
s
M XGTCR or
M XBGCR
R
−
RVLVCR +
1
2
3
4
Gate
Opening
5
6
Σ
RVLMAX
1
s
Relief Valve
LEGEND :
R
r
Tr
Tf
Tg
MXG TOR
MXGTCR
MXBGOR
Relief Valve
Opening
0
Permanent droop
MXBGCR Maximum buffered gate closing opening
Temporary droop
GM AX
Maximum gate limit
Governor time constant
GM IN
Minimum gate limit
Filter time constant
RVLVCR Relief valve closing rate
Servo time constant
RVLM AX Maximum relief valve limit
MXJDOR Maximum jet deflector opening rate
Maximum gate opening rate
MXJDCR Maximum jet deflector closing rate
Maximum gate closing rate
Maximum buffered gate opening rate
Hydro Turbine Governor Traveling W ave M odel
Governor TGOV4 Modified IEEE Type 1 Speed-Governor Model with PLU and EVA Model TGOV4
sT R EV A
1 + sT RE VA
Generator Power
E V A > R ate
L evel
Y
T IV 1
AND
−
EVA >
U nbalance
L evel
Σ
+
OR
T IV 2
Y
IV #1
IV # 2
Reheat Pressure
Generator Current
sT R PL U
1 + sT R PLU
TC V 1
P L U > R ate
L evel
T im er
Y
TC V 2
AND
+
−
PLU >
U nbalance
L evel
Σ
TC V 3
Y
N
1
2
3
4
5
6
LATCH
PLU and EVA Logic Diagram
TC V 4
CV #1
CV # 2
CV # 3
CV # 4
Governor TWDM1T Tail Water Depression Hydro Governor Model TWDM 1T
VELM OPEN
+
N REF
1
1+ sTf
Σ
−
Speed +
e
VELM CLOSE
+
1
s
1
rTr
1+ sTr
Σ
GATE MAX
1
1+ sTg
c
g
GATE MIN
R
π
÷
−
h
1
sTW
Σ
+
q
1
1
2
3
4
5
6
+
Σ
π
At
−
+
Σ
1.0
PMECH
−
qNL
0.
D turb
Tail W ater Depression M odel 1
Speed
Δf < F2
AND
ΔFREQ
1
1+ sTft
Δf
sΔf < sF2
TF 2LATCH
Measured Frequency
Δf < F1
TF1LATCH
Tail W ater Depression Trip M odel
OR
Trip Tail
Water
Depression
Governor TWDM2T Tail Water Depression Hydro Governor Model TWDM 2T
Δω
SPEED −
1
s
Σ
+
Reg
1 + sTREG
+
+
+
Σ
1
LOGIC
(1+ sTA )
+
Two
Trip
TWD Lock MIN
V ELMN
Σ
π
÷
−
h
Σ
+
1
sTW
1
q
+
Σ
π
At
−
3
4
5
6
1
1+ sTft
Σ
1.0
PMECH
0.
qNL
D turb
Δf < F2
AND
ΔFREQ
+
−
Tail W ater Depression M odel 2
2
G ATMN
sKD
PELECT
1
1
s
1
1+ sTB
2
KP
PREF
−
G ATMX
V ELMX
TWD Lock MAX
Δf
sΔf < sF2
TF 2LATCH
Measured Frequency
Δf < F1
TF1LATCH
Tail W ater Depression Trip M odel
OR
Trip Tail
Water
Depression
HVDC
Two Terminal DC Control Diagram
PD E S
VOLTAGE
TRAN SD U C ER
VDC
VMEAS
1
1 + sTv
I DES =
CURRENT
TRAN SD U C ER
I DC
+
Σ
PM O D
+ RECT
PDES
VMEAS
C O N STAN T
POW ER
I MAX
1
1 + sTC
I MIN
VMIN
MARGIN
SWITCH
LOGIC
−
+
I M OD
−
Σ
I DES
If I MIN ≤ I DES ≤ I MAX
I ORD = I DES
If I MIN > I DES , I ORD = I DES
If I MAX < I DES , I ORD = I MAX
I MAX
I M EAS
C O N STAN T
CURRENT
VMEAS
I MIN = 10% * I MAX
VMIN = VLIM *VRATED
− I ORD
( RECTIFIER )
C URREN T
M ARGIN
( IN VERTER )
Model in the public domain, available from BPA
E OR E OI
LIM
+
1
1 + sTD
−Kα (1+ sT1)
(1+ sT2 )(1+ sT3 )
Vα'
0
+
Σ
+
2RC
Vα
Vα
− cos γ o
EOR
V
cosαI = α − cos γ
EOR
cosαR =
1.35 E C
cosαR
cosαI
LIM = E OR (cos γ 0 + cos γ min ) − 2 I M EAS RC ( RECT )
LIM = E OI (cos γ + cos γ STOP ) − 2 I M EAS RC ( IVERT )
I M EAS
I M EAS
( RECTIFIER )
( IN VERTER )
HVDC
WSCC Stability Program Two-Terminal DC Line Model
P G E N r + jQ G E N r
1: Nr
P G E N i − jQ G E N i
X
1
cr
V vr
2
R cr
L sr
V Ar
3 2
π
N rV A R =
D r' = E r c o s α −
cos θ r =
I
''
I
'''
R
D r'
3I
π
3 2
π
X
V pr
cr
L
Pi
Vr
cos γ r =
IX
cr
2V p r
L si
− cos θ r
Ei =
3 2
π
cos θ i =
− E i cos γ
M IN
= (E r cos α
M IN
+ Ei cos γ
STO P
− V vr − V vi ) / R T O T
− V vr − V vi ) / R T O T
W H E R E R T O T = R + R cr + R ci +
Model in the public domain, available from BPA
3
π
(X
cr
V vi
− X
D i'
N iV A i =
D i' = E i c o s α −
D r'
Er
M IN
X
N i :1
ci
V Ai
Vi
P G E N r = D r' I
= (E r cos α
R ci
I
3
V pr
Er =
Pr
ci
)
D i'
Ei
3I
π
3 2
π
X ci
V pi
V pi
cos β i = cos θ i −
P G E N i = D i' I
IX
ci
2V p i
HVDC-MTDC Control System for Rectifiers and Inverters without
Current Margin
VDC
1
1 + sTv
I DC
1
1 + sTC
VLAG
I DES =
PDES
VMEAS
C O N STAN T
POW ER
I MAX
I M' AX
I MIN
V
C O N STAN T
CURRENT
I DES
If I MIN ≤ I D ≤ I MAX
I ORD = I D
If I D > I MAX , I ORD = I MAX
If I D < I MIN , I ORD = I MIN
DV
I M EAS
+
−
I REF
Σ
−
V doL
I ORD
LIM
−Kα (1+ sT1)
(1+ sT2 )(1+ sT3 )
V1
V3 GREATER Vα
OF THE
TWO
0.0
VC
REC T LIM = V doL (cos γ 0 + cos γ min )
INV LIM = V doL (cos γ 0 + cos γ STOP )
6 XC
π
I M EAS
Model in the public domain, available from BPA
1
1 + sTLIM
+1.
V
cos α = α − cos γ ON
VdoL
− 1.
V do
cosα
HVDC-MTDC Control System for Terminals with Current Margin
I
I O RD 2 O RD 1
I O RD 3
.. Σ
I ORD
cos γ ON =
2 RC ( FRAC ) I MARG
+ cos γ o
Vdo INITIAL
FRAC = 0.25
N -1
VCORD = Vdo (cos γ ON − cos γ o ) + 2 RC I ORD
I DC
1
1 + sTC
I M EAS
I O RD
VC O RD
−
+
Σ
LIM
+
I M ARG
V doL
−Kα (1+ sT1)
(1+ sT2 )(1+ sT3 )
V1
V3
0.0
GREATEST
OF THE
TWO
VC
LIM = V doL (cos γ ON + cos γ STOP )
6 XC
π
I M EAS
Model in the public domain, available from BPA
Vα
1
1 + sTLIM
+1.
V
cos α = α − cos γ ON
VdoL
− 1.
V do
cosα
HVDC
Detailed VDCL and Mode Change Card Multi-Terminal
CURRENT
YES
1.0
PDES
VMEAS
Y1
PDES
VMEAS
I DES
VMEAS
Y0
VMEAS > VC1
NO
VOLTAGE
V1
Y1 , Y0
V1 , V2
VDCL
V2
VDCL
PU Current on rated Current base
PU Voltage on rated Voltage base
Model in the public domain, available from BPA
VC1
I ORD
Mode Change
PU rated DC Voltage below
which mode is changed to constant
I from constant P
HVDC
Equivalent Circuit of a Two Terminal DC Line
X
r
Rr
R cr R eqr
RL
R eqi
R ci
Xi
Ri
1:T
1:T
Pr , Qr
+
Eα r
E cr
Id
VDr
−
V dor c o s α r
Model in the public domain, available from BPA
VDi
Pi , Qi
+
V dr
V di
−
−V doi c o s α i
E ci
Eα i
HVDC
BPA Converter Controller
PD E S
VOLTAGE
TRAN SD U C ER
VDC
VMEAS
1
1 + sTv
+
I DES =
CURRENT
TRAN SD U C ER
I DC
Σ
PM O D
+ RECT
PDES
VMEAS
C O N STAN T
POW ER
I MAX
If I MIN ≤ I DES ≤ I MAX
I ORD = I DES
If I MIN > I DES , I ORD = I DES
If I MAX < I DES , I ORD = I MAX
I MAX
I MIN
I M EAS
VMIN
MARGIN
SWITCH
LOGIC
−
I M OD
−
I DES
I DES
1
1 + sTC
+
C O N STAN T
CURRENT
Σ
VMEAS
I MIN = 10% * I MAX
VMIN = VLIM *VRATED
− I ORD
+
( RECTIFIER )
C U RREN T
M ARG IN
C U R R E N T LIM
CONTROLLER
−Kα (1+ sT1)
(1+ sT2 )(1+ sT3 )
E OR E OI
Vα'
0
+
Σ
+
2RC
( IN VERTER )
Model in the public domain, available from BPA
1
1 + sTD
Vα
Vα
− cos γ o
EOR
V
cosαI = α − cos γ
EOR
cosαR =
1.35 E C
cosαR
cosαI
LIM = E OR (cos γ 0 + cos γ min ) − 2 I M EAS RC ( RECT )
LIM = E OI (cos γ + cos γ STOP ) − 2 I M EAS RC ( IVERT )
I M EAS
I M EAS
( RECTIFIER )
( IN VERTER )
HVDC
BPA Block Diagram of Simplified Model
PD E S
Vdr
VMEAS
1
1 + sTv
PM O D
Σ
+
I DES =
+ (R)
PDES
VMEAS
C O N STAN T
POW ER
C O N STAN T
CURRENT
I des
I des
Id
I MAX
1
1 + sTC
Id
If I MIN < I des < I MAX
I ord = I des
If I MIN ≥ I des , I ord = I MIN
If I MAX ≤ I des , I ord = I MAX
I MAX
I MIN
VMIN
M EAS
VMEAS
MARGIN
SWITCH
LOGIC
DI
+
Σ
I M OD
I ORD
+
I ord
r
I ord
r
+
V dor
Vdor cosα0 −Vdoi cos γ i − 2V0
RT
I DC
I ord
1
iT
IDC
1+ sTL
+
I ord
Σ
−
ΔI
( c u r r e n t m a r g in )
+
IN V . C o n tr o lle r
Model in the public domain, available from BPA
Id
cosαr
cosαi
i
V doi
DI
C o n tr o l S c h e m e
L o g ic
I ord
If:
i
C o n tr o l S c h e m e L o g ic
iT ≥ Iordr →CC −CEAControl →Id = Iordr
γi = γo; Vdor cosαr =Vdoi cosγo + 2VD + RT ID
iT ≥ Iordi →CIA−CC Control →Id = Iordi
γr = γo; Vdoi cosγi =Vdo cosαo −2VD − RT ID
Iordi < iT < Iordr →CIA−CEAControl →Id = iT
αr =αo; γi = γo
HVDC
BPA Block Diagram of Simplified Model
I M AX
I AC
PAC
s
s +ε
1
1+ sTf
s
1+ sTd
I M OD
s2 + sA + B
s2 + sC + D
K
I M IN
Low Level M odulation
PM* AX
I AC
PAC
s
s +ε
1
1+ sTf
s
1+ sTd
s2 + sA + B
s2 + sC + D
PM OD
K
PM* IN
High Level M odulation
*
M AX
P
ω1
RECT
ω2
INV
= PM AX − PDESIRED
PM* IN = PM IN − PDESIRED
PM AX
s
1+ sTd1
1
1+ sTf 1
s
s + ε1
s + sA1 + B1
s2 + sC1 + D1
K1
s
1+ sTd 2
1
1+ sTf 2
s
s + ε2
s2 + sA2 + B2
s2 + sC2 + D2
K2
2
Dual Frequancy M odulation
Model in the public domain, available from BPA
+
Σ
−
PM OD
PM IN
HVDC
BPA Block Diagram of Simplified Model
Gamm a M odulation
γ M AX
V AC
s
1+ sT1
+
Σ
−
A + sT3
1+ sT4
V REF
T1 , T3 , T4 , T5 are in secs.
γ M AX , γ M IN are in degrees
HILO must be 5
Model in the public domain, available from BPA
B + sT5
1+ sT6
Kγ
+
Σ
+
γ0
K γ is in degrees/pu volts
A , B must be 1 or zero
γ M IN
γ
Load Characteristic CIM5 Load Characteristic CIM5
Induction Motor Load Model
Type 1
Type 2
RA + jX A
RA + jX A
jX1
jX1
jX2
jXm
jX2
jXm
R1
s
R2
s
R1
s
Impedances on Motor MVA Base
Model Notes:
1. To model single cage motor: set R2 = X2 = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE
3. Load Torque, TL = T(1+Dω )D
4. For motor starting, T=Tnom is specified by the user in CON(J+18). For motor online studies, T=T0 is calculated
in the code during initialization and stored in VAR(L+4).
5. V| is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set
V=0
|
6. T| is the time in cycles for which the voltage must remain below the threshold for the relay to trip. TB is the
breaker delay time cycles.
Model supported by PSSE
R2
s
Load Characteristic CIM6 Load Characteristic CIM6
Induction Motor Load Model
Type 1
Type 2
RA + jX A
RA + jX A
jX1
jX1
jX2
jXm
jX2
jXm
R1
s
R2
s
R1
s
Impedances on Motor MVA Base
Model Notes:
1. To model single cage motor: set R2 = X2 = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE
3. Load Torque, TL = T( Aω2 +Bω +C0 +DωE )
D
4. For motor starting, T=Tnom is specified by the user in CON(J+22). For motor online studies, T=T0 is calculated
in the code during initialization and stored in VAR(L+4).
5. V| is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set
V=0
|
6. T| is the time in cycles for which the voltage must remain below the threshold for the relay to trip. TB is the
breaker delay time cycles.
Model supported by PSSE
R2
s
Load Characteristic CIMW Load Characteristic CIMW
Induction Motor Load Model
Type 1
Type 2
RA + jX A
RA + jX A
jX1
jX1
jX2
jXm
jX2
jXm
R1
s
R2
s
R1
s
Impedances on Motor MVA Base
Model Notes:
1. To model single cage motor: set R2 = X2 = 0.
2. When MBASE = 0.; motor MVA base = PMULT*MW load. When MBASE > 0.; motor MVA base = MBASE
3. Load Torque, TL = T( Aω2 +Bω +C0 +DωE ) where C0=1− Aω2 − Bω0 − DωE0 .
D
4. This model cannot be used formotor starting studies. T0 is calculated in the code during initialization and
stored in VAR(L+4).
5. V| is the per unit voltage level below which the relay to trip the motor will begin timing. To display relay, set
V=0
|
6. T| is the time in cycles for which the voltage must remain below the threshold for the relay to trip. TB is the
breaker delay time cycles.
Model supported by PSSE
R2
s
Load Characteristic CLOD Load Characteristic CLOD
Complex Load Model
P + jQ
Tap
R + jX
PO
PO = Load MW input on system base
I
M
M
Large
Motors
Small
Motors
Model supported by PSSE
I
V
Discharge
Motors
Constant
MVA
P = PRO *V KP
Q = QRO *V 2
V
Transformer
Saturation
Remaining
Loads
Load Characteristic EXTL Load Characteristic EXTL
Complex Load Model
Pinitial
Q initial
PMLTMX
+
Pactual
π
−
Σ
QMLTMX
+
1
Pinitial
KP
s
PMLTMN
PMULT
Q actual
π
−
Σ
1
KQ
Q initial
s
QMLTMN
QMULT
Load Characteristic IEEL Load Characteristic IEEL
Complex Load Model
(
(a v
)
P = Pload a1vn1 + a2vn2 + a3vn3 (1+ a7Δf )
Q = Qload
Model supported by PSSE
n4
4
)
+ a5vn5 + a6vn6 (1+ a8Δf )
Load Characteristic LDFR Load Characteristic LDFR
Complex Load Model
m
⎛ω⎞
P = PO ⎜ ⎟
⎝ ωO ⎠
n
⎛ω⎞
Q = QO ⎜ ⎟
⎝ ωO ⎠
r
⎛ω⎞
I p = I po ⎜ ⎟
⎝ ωO ⎠
s
⎛ω⎞
Iq = Iqo ⎜ ⎟
⎝ ωO ⎠
Model supported by PSSE
Load Characteristic BPA INDUCTION MOTOR I Load Characteristic BPA Induction MotorI
Induction Motor Load Model
RS + jXS
jXR
MECHANICAL
LOAD
jXm
R=
RR
s
Model Notes:
Mechanical Load Torque, T = ( Aω2 + Bω + C)TO
where C is calculated by the program such that
Aω2 + Bω + C = 1.0
ω = 1−ω
Model in the public domain, available from BPA
T, EMWS
Load Characteristic BPA TYPE LA Load Characteristic BPA Type LA
Load Model
2
P = P0 ( PV
+ PV
1
2 + P3 + P4 (1+Δf * LDP ) )
Model in the public domain, available from BPA
Load Characteristic BPA TYPE LB Load Characteristic BPA Type LB
Load Model
2
P = P0 ( PV
+ PV
1
2 + P3 ) (1+Δf * LDP )
Model in the public domain, available from BPA
Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG Stabilizer BPA SF, BPA SP, BPA SS, and BPA SG
Stabilizer Models
⎧
⎪
⎪
⎪
⎪
CHOICE OF ⎪
INPUT SIGNALS⎨
⎪
⎪
⎪
⎪
⎪
⎩
K QV
VT =VTO − VT
2
1+sTQV
−
e ts
KQS
+
Σ
+
SHAFT SLIP,
Δ FREQ. OR
ACCEL. POWER
3
sTQ
1+sTQ
6
'
Q3
1+sT
1+sT
1+sT
1+sTQ1
1+sTQ2
1+sTQ3
1+sTQS
ΔVT
1
VSMAX
If VCUTOFF >0.0, then
VS'
VS =V if ΔVT ≤ VCUTOFF
'
S
VS =0.0 if ΔVT >VCUTOFF
1 - K QS
'
Q2
K QS
If VCUTOFF ≤ 0.0, then VS =VS'
States
5
4
'
Q1
ΔVT =VTO − VT
2 - K QV
3 - TQ
4 - TQ1
5 - TQ2
6 - TQ3
Model in the public domain, available from BPA
VSMIN
VST
ZERO
Stabilizer BPA SH, BPA SHPLUS, and BPA SI Stabilizer BPA SH, BPA SHPLUS, and BPA SI
Stabilizer Models
No block diagrams have been created
Stabilizer IEE2ST Stabilizer IEE2ST
IEEE Stabilizing Model with Dual-Input Signals
Input Signal #1
K1
1+sT1
1
+
Σ
+
Input Signal #2
K2
1+sT2
sT3
1+sT4
1+sT5
1+sT6
1+sT9
1+sT10
6
VSS
LSMIN
1 - Transducer1
2 - Transducer2
3 - Washout
4 - LL1
5 - LL2
6 - Unlimited Signal
Model supported by PSSE
5
1+sT7
1+sT8
2
LSMAX
States
4
3
Output Limiter
VS = VSS if (VCU > VCT > VCL )
VS = 0 if (VCT < VCL )
VS = 0 if (VCT > VCU )
VST
Stabilizer IEEEST Stabilizer IEEEST
IEEE Stabilizing Model
Filter
Input Signal
1+A5s+A 6s 2
(1+A1s+A 2s 2 )(1+A 3s+A 4s 2 )
1
2
3
5
4
L SM AX
sT5
KS
1+sT6
7
VSS
L SM IN
1+sT3
1+sT4
1+sT1
1+sT2
6
Output Limiter
VS = VSS if (VCU > VCT > VCL )
VS = 0 if (VCT < VCL )
VS = 0 if (VCT > VCU )
States
1 - Filter 1
2 - Filter 2
3 - Filter 3
4 - Filter Out
5 - LL1
6 - LL2
7 - Unlimited Signal
Model supported by PSLF with time delay that is not implemented in Simulator
Model supported by PSSE
VST
Stabilizer PFQRG Stabilizer PFQRG
Power-Sensitive Stabilizing Unit
Reactive
Power
J=1
+
Σ
J=0
Power
Factor
States
1 - PI
Model supported by PSLF
+
KP +
KI
s
1
M AX To Voltage
Regulator
VST
-M AX
Reference Signal,
Reactive power or
Power Factor
Supplementary
Signal
Stabilizer PSS2A Stabilizer PSS2A
IEEE Dual-Input Stabilizer Model
1
Input Signal #1
2
sTW2
1+sTW2
sTW1
1+sTW1
3
1
1+sT6
+
7
Σ
+
⎡ 1+sT8 ⎤
⎢
M ⎥
⎣ (1+sT9 ) ⎦
9
4
Input Signal #2
sTW3
1+sTW3
sTW4
1+sTW4
6
K S2
1+sT7
States
1 - WOTW1
11 - RampFilter3
2 - WOTW2
3 - Transducer1
12 - RampFilter4
13 - RampFilter5
4 - WOTW3
14 - RampFilter6
5 - WOTW4
15 - RampFilter7
6 - Transducer2
16 - RampFilter8
7 - LL1
8 - LL2
17 - RampFilter9
18 - RampFilter10
9 - RampFilter1
19 - LLGEOnly
+
Σ
−
K S1
1+sT1
1+sT2
8
1+sT3
1+sT4
− 18
K S3
5
N
10 - RampFilter2
Model supported by PSLF
Model supported by PSSE without TA ,TB lead/lag block and with K S4 = 1
VSTMAX
K S4
A+sTA
1+sTB
19
VST
VSTMIN
Stabilizer PSS2B Stabilizer PSS2B
IEEE Dual-Input Stabilizer Model
VS1M AX
VS1
1
sTW1
1+sTW1
3
2
1
1+sT6
sTW2
1+sTW2
7
+
Σ
+
VS1M IN
⎡ 1+sT8 ⎤
⎢
M ⎥
⎣ (1+sT9 ) ⎦
9
VS2
sTW3
1+sTW3
6
5
4
sTW4
1+sTW4
+
Σ
K S1
−
1+sT1
1+sT2
20
8
1+sT3
1+sT4
1+sT10
1+sT11
− 18
K S3
VS2M AX
N
K S2
1+sT7
VS2M IN
States
1 - WOTW1
11 - RampFilter3
2 - WOTW2
12 - RampFilter4
3 - Transducer1
13 - RampFilter5
4 - WOTW3
14 - RampFilter6
5 - WOTW4
15 - RampFilter7
6 - Transducer2
16 - RampFilter8
7 - LL1
17 - RampFilter9
8 - LL2
18 - RampFilter10
9 - RampFilter1
19 - LLGEOnly
10 - RampFilter2 20 - LL3
Model supported by PSLF
Model supported by PSSE without TA ,TB lead/lag block and with K S4 = 1
VSTMAX
K S4
A+sTA
1+sTB
19
VSTMIN
VST
Stabilizer PSSSB Stabilizer PSSSB
IEEE PSS2A Dual-Input Stabilizer Plus Voltage Boost Signal
Transient Stabilizer and Vcutoff
Input 1
sTW1
1+sTW1
1
1+sT6
sTW2
1+sTW2
7
3
2
1
+
Σ
+
K S3
4
Input 2
sTW3
1+sTW3
5
sTW4
1+sTW4
⎡ 1+sT8 ⎤
⎢
M ⎥
⎣ (1+sT9 ) ⎦
9
+
N
Σ
K S1
−
1+sT1
1+sT2
1+sT3
1+sT4
ΔVT >Vcutoff
VSTMIN
K S2
1+sT7
3 - Transducer1
13 - RampFilter5
4 - WOTW3
5 - WOTW4
14 - RampFilter6
15 - RampFilter7
6 - Transducer2
16 - RampFilter8
7 - LL1
8 - LL2
17 - RampFilter9
18 - RampFilter10
9 - RampFilter1
19 - TransducerTEB
0
+
Σ
+
States
11 - RampFilter3
12 - RampFilter4
VSTMAX
K S4
6
1 - WOTW1
2 - WOTW2
ΔVT =VT0 -VT
− 18
19
10 - RampFilter2 20 - WOTEB
Model supported by PSLF
8
1
1+sTd1
0
VK
1
Sw 1
0
20
sTd2
1+sTd2
Vtl
≤0
V cutoff
VST
Stabilizer PTIST1 Stabilizer PTIST1
PTI Microprocessor-Based Stabilizer
1
Δω
Ms
1+sTF
+
Σ
P'M +
Σ
−
+
1
1+sTP
K(1+sT1 )(1+sT3 )
(1+sT2 )(1 + sT4 )
Tap
Selection
Table
−
+
Σ
π
Et
Pe on machine MVA base
Model supported by PSSE but not yet implemented in Simulator
VST
Stabilizer PTIST3 Stabilizer PTIST3
PTI Microprocessor-Based Stabilizer
Δω
Ms
1+sTF
+
Σ
P'M +
Σ
−
+
1
1+sTP
K(1+sT1 )(1+sT3 )
(1+sT2 )(1 + sT4 )
(A 0 +A1s+A 2s 2 )(A 3 +A 4s+A 5s 2 )
(B0 +B1s+B2s 2 )(B3 +B4s+B5s 2 )
1+sT5
1+sT6
Pe on machine MVA base
1
DL
Sw itch = 0
Averaging
Function
− DL
Limit
Function
AL
Sw itch = 1
− AL
Model supported by PSSE but not yet implemented in Simulator
Tap
Selection
Table
−
Et
+
Σ
π
VST
Stabilizer ST2CUT Stabilizer ST2CUT
Stabilizing Model with Dual-Input Signals
Input Signal #1
K1
1+sT1
1
+
Σ
+
Input Signal #2
K2
1+sT2
2
4
3
sT3
1+sT4
5
1+sT7
1+sT8
1+sT5
1+sT6
L SM AX
L SM IN
VSS
VS = VSS
6
1+sT9
1+sT10
Output Limiter
if (VCU +VTO >VT >VCL +VTO )
VS = 0 if (VT < VTO +VCL )
VS = 0 if (VCT > VTO +VCU )
VTO = initial terminal voltage
VT = terminal voltage
States
1 - Transducer1
2 - Transducer2
3 - Washout
4 - LL1
5 - LL2
6 - Unlimited Signal
Model supported by PSSE
VST
Stabilizer STAB1 Stabilizer STAB1
Speed-Sensitive Stabilizing Model
Speed (pu)
Ks
1+sT
1
1+sT1
1+sT3
2
1+sT2
1+sT4
3
H LIM
VST
-H LIM
States
1 - Washout
2 - Lead-lag 1
3 - Lead-lag 2
Model supported by PSSE
Stabilizer STAB2A Stabilizer STAB2A
Power-Sensitive Stabilizing Unit
K3
1+sT3
Pe on machine
MVA base
⎡ K sT ⎤
−⎢ 2 2 ⎥
⎣ 1+sT2 ⎦
1
States
1 - Input State 1
2 - Input State 2
3 - Input State 3
4 - T3
5 - Output State 1
6 - Output State 2
Model supported by PSSE
−
3
3
4
+
Σ
+
K4
⎡ K5 ⎤
⎢
⎥
⎣1+sT5 ⎦
5
−
2
6
H LIM
VST
-H LIM
Stabilizer STAB3 Stabilizer STAB3
Power-Sensitive Stabilizing Unit
Pref
Pe on machine
MVA base
1
1+sTt
1
+
−
Σ
VLIM
1
1+sTX1
2
-sK X
1+sTX2
3
VST
-VLIM
States
1 - Int Tt
2 - Int TX1
3 - Unlimited Signal
Model supported by PSSE
Stabilizer STAB4 Stabilizer STAB4
Power-Sensitive Stabilizer
Pref
Pe on machine
MVA base
1
1+sTt
1
+
3
2
−
Σ
sK X
1+sTX2
1+sTa
1+sTX1
5
4
1+sTb
1+sTc
1
1+sTd
6
L2
1
1+sTe
VST
L1
States
1 - Input
2 - Reset
3 - LL1
4 - LL2
5 - Td
6 - Unlimited Signal
Model supported by PSSE
Stabilizer STBSVC Stabilizer STBSVC
WECC Supplementary Signal for Static var Compensator
2
1
Input Signal #1
1+sTS8
1+sTS9
K S1
1+sTS7
5
+
Σ
3
Input Signal #2
States
1 - Transducer1
2 - LL1
3 - Transducer2
4 - LL2
5 - W ashout
Model supported by PSSE
K S2
1+sTS10
4
1+sTS11
1+sTS12
+
sTS13
KS3
1+sTS14
VSCS
K S3
VST
-VSCS
Stabilizer WSCCST Stabilizer WSCCST
WSCC Power System Stabilizer
VT0
VT
k
−
+
Σ
f(U)
States
K qv
1 - Transducer1
2 - Transducer2
1
1+sTqv
sT2
1+sT2
1
1+sT1
3 - W ashoutTq
+
Σ
+
+
K qs
4 - LL1
5 - LL2
'
s
V
Σ
+
6 - LL3
Kt
signal j
−−−−−−
speed 1
accpw 2
freq
3
1
1+sTqs
sT3
1+sT3
2
−
s
1+sT4
−
U
Σ
+
ΔVT =VT0 -VT
0
VSMAX
sTq
1+sTq
3
1+sTq1'
4
1+sTq1
1+sTq2'
5
1+sTq2
1+sTq3'
6
+
1+sTq3
VSLOW
0
VK
1
0
Sw 1
Model supported by PSLF
Blocks in gray have not been implemented in Simulator
1
1+sTd1
sTd2
1+sTd2
Vtl
Σ
+
≤0
V cutoff
ΔVT >Vcutoff
VS
Stabilizer WT12A1 and WT1P Stabilizer WT12A1 and WT1P
Pseudo Governor Model for Type 1 and Type 2 Wind Turbines
Speed
KP
+
ω ref
−
+
Pgen
1
1+sTPE
1
−
Σ
K droop
+
Pref
States
1 - Pgen
2 - KI
3 - T1
4 - Pmech
WT12A1 supported by PSSE with K I =
WT1P supported by PSLF
1
TI
PI MAX
+
Σ
1
1+sT1
Σ
+
KI
1
s
PI MIN
2
3
1
1+sT2
4
Pmech
Stabilizer WT3P and WT3P1 Stabilizer WT3P and WT3P1
Pitch Control Model for Type 3 Wind Generator
Theta MAX
ω
+
Σ
−
2
RTheta MAX
+
Σ
+
+
−
+
−
Σ
K PC +
Pset
0
K IC
s
1
sTP
Σ
T heta M IN
ω ref
PORD
K
K PP + IP
s
Theta M AX
-RTheta MAX
T heta M IN
3
States
1 - Pitch
2 - PitchControl
3 - PitchComp
WT3P supported by PSLF
TP =TPI , Theta MAX =PI MAX , Theta MIN =PI MIN , and RTheta MAX = PIRATE
WT3P1 supported by PSSE with no non-windup limits on pitch control
1
Pitch