in power")
1
Superconducting Magnetic Energy Storage (SMES)
in Power Systems with Renewable Energy Sources
Knut Erik Nielsen, Marta Molinas
Department of Electric Power Engineering
NTNU
Trondheim, Norway
Email: knutern@stud.ntnu.no
Abstract—A power conditioning system consisting of a Superconducting Magnetic Energy Storage (SMES) which can be used
to smooth out differences between output power of a generator
and power loads is analyzed in this paper. The SMES is connected
in shunt with the distribution lines through a converter. The
converter is a voltage source converter type with a DC-chopper.
The system is controlled by three regulators; they are working
on the DC-link voltage, the power to and from the SMES and
the AC-currents in the inverter. The regulators controlling the
power flow and the AC-currents are cascaded and the DC-link
voltage controller is situated in an independent loop with its
voltage kept constant using the SMES. Simulations have been
carried out using the software PSCAD/EMTDC.
Index Terms—Energy storage, SMES, AC-DC/DC-DC converter, PSCAD.
I. I NTRODUCTION
R
ENEWABLE energy sources will have a key role in
supplying energy in the future. More exactly wind power
and other types of new renewables. There are several issues
regarding large scale integration of new renewables into the
power system. One of the problems is the security of supply.
It is not possible to control the power output from a wind
park, or the output from a wave energy power plant as it is
for hydropower. These energy sources will provide energy, or
not provide, independent of the demand. The output power can
also have relatively large variations within a short time span.
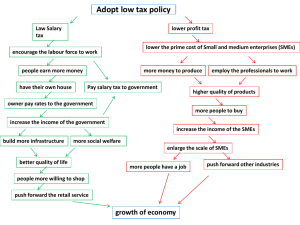
A solution to this problem is the concept of energy storage,
and there are several different concepts. Fig. 1 shows some of
the different concepts and their characteristics with regards to
power output and output duration. The different storage types
can principally be divided into two groups. There are devices
which can store large amounts of energy, but do not react so
fast. Pumped hydro storage is one energy storage solution of
this type. In the other end there are fast acting devices which
store smaller amounts of energy. Superconducting Magnetic
Energy Storage (SMES) is placed in this group. The SMES
is a coil which is in a superconducting state at cryogenic
temperature. This means that the ohmic losses during operation
will be very low, close to zero. An energy storage system
of this type can charge and discharge very fast, or said in
a different way it has the ability to absorb, or deliver high
quantities of power. Another positive element about SMES
is the life cycle. A coil of this type can withstand tens of
thousands of charging cycles. This corresponds to several
978-1-4244-6391-6/10/$26.00 ©2010 IEEE
Fig. 1. Different energy storage concepts, and their range of power output
and output duration [1].
decades of operation, and compared to battery storage systems
the lifetime is much longer [1]. To reach the superconducting
state the coil has to be cooled to less than 9.8 K [2]. This
is achieved using liquid helium which brings the temperature
down to 4.2 K. The need for cooling is an aspect which lowers
the efficiency, but the power needed for cooling is far less than
the output power of the SMES [3]. Combined with ohmic
losses in the non superconducting devices the efficiency can
exceed 90% [4].
When deciding which converter topology to use to connect
the SMES to the grid, aspects as harmonic distortion, usage
of reactive power and on-state losses has to be considered. A
line commutated converter using thyristors has low on-state
losses and it can handle large amounts of power, but it has
lagging power factor, and high low order harmonics. Even the
twelve pulse topology has too high total harmonic distortion
2487
2
Fig. 3.
VSC.
The DC-DC converter connecting the SMES to the DC-link of the
Fig. 2.
Single line diagram of the system investigated.
to meet the standards regarding harmonics [5]. Because of
these drawbacks, a self commutating converter is selected in
this paper. Even though the on-state losses are higher than
for thyristors, these have better characteristics when it comes
to harmonics and their reactive power flow can be controlled.
Among the self commutated converters there are mainly two
different to choose from: Current source converter (CSC) and
voltage source (VSC) converter. The CSC may seem as the
most suitable solution as the SMES can be viewed upon as a
current source. This converter has also proved to be the more
suitable for delivering active and reactive power quickly into
the network [5]. A CSC is also more efficient when operated
in square-wave mode than a PWM VSI [6]. On the other hand
a CSC is more complicated to control than a VSC [7], it has a
high level of low order harmonics and the inductance in the DC
side makes the response slower [6]. Therefore a VSC has been
chosen here. This topology is better known than the CSC, and
literature regarding this converter type is more comprehensive.
II. T HE SYSTEM TOPOLOGY
The topology of the system which is being studied is shown
in Fig. 2. It consists of an induction generator with a rated
power of 2 MW. This is connected to a grid through a stepup transformer (T1) with ratio 0.69/22 kV. The system has
a constant pure active load of 0.5 MW per phase. In order
to magnetize the induction generator a main grid is also
connected. The SMES coil is connected in shunt with the
lines through a transformer (T2), which is equal to T1. The
converter is a VSC and a DC chopper connected via a DClink. The SMES is connected at the output terminals of the
DC chopper. The inductance of the coil is 1.8 H. The base
frequency in the system is 50 Hz.
A. The DC-DC converter
The DC-DC converter which has been used is the chopper
shown in Fig. 3 [8]. This converter has been studied using
the software PSIM and PSCAD/EMTDC. The two switches
TA and TB are modeled as fairly ideal IGBTs having a
ON-resistance of 0.001 Ω, OFF-resistance of 106 Ω. These
switches are controlled using PWM switching technique. The
two switches are controlled by the same function, and are
both ON or OFF at the same time. The control of the IGBTs
is achieved by comparison of a DC control voltage, Vcon and
a triangular voltage Vtri . Vtri has a minimum value of -1.0
and a maximum value of +1.0. The following describes the
relationship between Vcon and Vtri :
ma =
Vcon
V̂tri
(1)
ma can attain values between -1 and +1. The following
explains the behaviour of TA and TB :
Vtri < Vcon → TA and TB are ON
Vtri > Vcon → TA and TB are OFF
As can be seen from Fig. 3 the voltage across the coil VL
will switch between ±Vdc . The relation:
di
(2)
dt
shows that when the IGTBs are ON, and the voltage across the
inductor is +Vdc the current in the coil will increase. When
the IGBTs are OFF, VL will be equal to −Vdc and the current
in the coil will decrease. There is also a third state, which is
steady state, or stand by. This state is when the current in the
coil is constant. These three states can be described using ma :
ma > 0 : The coil will be in the charge state.
ma < 0 : The coil will be in the discharge state.
ma = 0 : The coil will be in steady state.
During the different states the current will not have a completely constant increase or decrease. But on average it will
increase when ma is greater than zero and decrease when it is
less than zero. In steady state mode the charge period of the
coil will be equal to the discharge period, and the current will
fluctuate around a certain value. Fig. 4 shows how the current
increase and decrease, but increase on average during several
switching periods. For comparison and exemplification ma has
VL = L
2488
3
0.12
ma = 0.4
ma = 0.8
0.1
Current (A)
0.08
0.06
0.04
0.02
0
0
Fig. 4.
0.2
0.4
0.6
0.8
1
Time (s)
1.2
1.4
1.6
1.8
2
The current in the SMES coil during charge.
Fig. 5.
been set equal to 0.4 and 0.8, and the carrier signal has been
given a frequency of 2 Hz and amplitude of ±0.5. The larger
the absolute value of ma , the smaller is the current derivative
in the opposite direction than the average current derivative as
can be seen from Fig. 4. The higher the switching frequency
is, the smaller is the current flow in the opposite direction than
the average current direction in each switching interval.
In a real case simulation the charging and the discharging
of the coil will have to be automatic. The control techniques
will be described later in this text.
B. AC-DC converter
The AC-DC converter is a conventional six switch full
bridge converter shown in Fig. 5. This means that the converter
can act as a rectifier and inverter. A capacitor is connected
in shunt between the two converters in the DC-link. The
capacitor is connected in order to keep the DC-voltage on
a constant level. The switching devices are IGBTs having the
same properties as those in the DC-DC converter. The DCside of the converter is connected to the terminals of the DCchopper. The switching is controlled using a PWM-switching
scheme, comparing a high frequency triangular signal and a
voltage reference signal. The reference signal is made using
d-q transformation. The d-q transformation secures simpler
calculation in the control loops because of the reduction from
three AC quantities to two DC quantities. It also enables the
possibility to control active and reactive power independent
from each other [9].
III. C ONTROL SYSTEM
The control system consists of three regulators. A DC-link
voltage controller, an active power controller and a current
controller. See appendix for block diagram and parameters
of the regulators. The parameters has been calculated using
the modulus optimum tuning criterion for the inner current
controller, and the symmetric optimum tuning criterion for
the other two regulators. The DC-link voltage regulator is
aimed at keeping the DC-link voltage on a constant reference.
This regulator is a PI-regulator (proportional-integral). The
reference voltage is set to be equal to 1.0pu, which equals
1.1 kV. The output of the regulator gives the voltage reference
for the DC-chopper, which is compared with a triangular
The VSC converter used between AC-grid and DC-link.
voltage. This means that the superconducting coil is being
charged or discharged to keep the voltage in the DC-link on a
constant level, or said in another way keep the current in the
DC-link capacitor near zero. This secures that the control of
the charging of the coil will be fast and accurate as the control
structure consists of only one block.
The control of the AC-DC converter is composed by two
cascaded regulators. The outer controller is the active power
controller. The reference for this regulator is the difference
between the generated power from the induction generator and
the active power demand by the load. The error is passed
through a PI-regulator and gives a reference current idref . This
reference goes into the inner current controller which output
is the voltage reference for the PWM. The output of the PWM
is the triggering signals for the IGBTs in the converter.
IV. S IMULATIONS
The power system in Fig. 2 has been simulated using the
software PSCAD/EMTDC. Simulations with different inductance values have been performed. The inductance values
are: 0.18 H, 1.8 H and 12 H. The sequence of events in the
simulation are given in Table I. This line of events takes
the SMES through all the three different states. The negative
sign before the torque reference indicates that it is driven as a
generator. -1.0pu corresponds to rated power, which is 2 MW.
This leaves 0.5 MW of extra power because the total load
is only 1.5 MW. The extra power is used to charge the coil.
When the torque reference is reduced to 0.75pu, the generated
power is equal to the load power, and the SMES is in steady
state, drawing no power nor supplying power to the network.
As the torque reference drops to 0.6pu the power from the
generator is not large enough to supply the loads. This takes
the SMES into the discharging state, which means that it
TABLE I
T HE SEQUENCE OF EVENTS IN THE SIMULATION STUDY
Time (sec)
0.0
2.0
4.0
6.0
2489
Event
System start up, generator control mode set to torque
control, and torque reference set to -1.0pu
Generator torque reference set to -0.75pu
Generator torque reference set to -0.6pu
Simulation stops
4
4.5
3
4
2.5
3.5
Charge
Steady state
Discharge
2
Current (kA)
Power (MW)
3
1.5
1
L=0.18 H
2.5
2
L=1.8 H
1.5
0.5
1
0
-0.5
0
Fig. 6.
L=12 H
0.5
1
2
3
Time (s)
4
5
Power output from the induction generator in the system of Fig. 2.
1.5
0
0
6
1
2
3
Time (s)
4
6
Fig. 8. The current profile in the SMES coil during charge, standby and
discharge for different inductances.
Power in SMES
Power reference for SMES
L = 1.8 H
L = 0.18 H
L = 12 H
1
1.2
Charge
0.5
Steady state
Discharge
1
0
Energy (MJ)
Power (MW)
5
-0.5
-1
-1.5
0
L = 12 H
L = 1.8 H
0.8
L = 0.18 H
0.6
0.4
1
2
3
Time (s)
4
5
0.2
6
0
0
Fig. 7. The reference power in the SMES and the actual power in the SMES
with 1.8 H coil.
supplies power to the grid. For comparison the simulation has
also been carried out when the SMES is not connected to
the grid. Fig. 6 shows the power output from the induction
generator. The first 0.2 second is the generator start-up period,
this results in some transients, but these have not been given
any consideration. As can be seen the power output does not
change instantaneously due to inertia in the generator. It is also
clear that 75% torque reference does not completely comply
with 75% power output from the generator.
The power flow in the SMES (grey line) is shown in Fig. 7
together with the difference between the generated power and
the load (black line). This difference is the reference for the
SMES power. The plot shows that the power to and from the
SMES follows the reference very good for these operating
conditions. As aforesaid the first 0.2 second is the start-up
period of the generator. During this period the reference power
for the SMES is set to zero to avoid the controller from trying
to follow the difference between generated power and the load
under transitory conditions.
The current and the energy in the superconducting coil
during the same sequence of simulation is shown in Fig. 8 and
Fig. 9 for the three different inductance values. The relation
between current and energy is:
E=
1 2
LI
2
(3)
The different current values and energy levels can be found in
table II. The maximum current level in the coil with the
Fig. 9.
1
2
3
Time (s)
4
5
6
The energy in the SMES for different inductances.
TABLE II
T HE ENERGY AND CURRENT LEVELS IN SMES COIL WITH DIFFERENT
INDUCTANCES .
Max current
Current at end of steady state
Current at end of simulation
Max energy
Energy at end of steady state
Energy at end of simulation
0.18 H
3.265 kA
3.145 kA
1.733 kA
0.959 MJ
0.890 MJ
0.270 MJ
1.8 H
1.058 kA
1.048 kA
0.658 kA
1.01 MJ
0.988 MJ
0.390 MJ
12 H
0.4122 kA
0.4095 kA
0.270 kA
1.02 MJ
1.01 MJ
0.437 MJ
least inductance is much higher than the current levels of
the coils having larger inductance. But the energy level is as
seen lower. The low inductance coil does also lose more of
its stored energy during the steady state than the others. The
reason for the more varying current is given by Lenz’s law
[10] which says that there will be induced an emf to oppose
the change of current. This opposing emf is stronger in a
coil having more inductance, and thereby the coil having the
least inductance will experience more change in the current.
An advantage of the low inductance coil is that it can react
quicker on demands from the network. On the other side
is the large inductance coil which stores more energy, but
have a somewhat slower reaction time. Anyway the response
time is very short, so this is not a major issue. The low
current in the 12 H-coil can be an advantage when it comes to
equipment. It would mean less demand on the current handling
capabilities of non superconducting components in the system.
2490
5
0.6234
V. S IZING OF UNITS IN THE SYSTEM
0.6233
0.6233
Current (kA)
0.6232
0.6232
0.6231
0.6231
0.623
0.623
0.6229
1.904
Fig. 10.
1.9041 1.9042 1.9043 1.9044 1.9045 1.9046 1.9047 1.9048 1.9049
Time (s)
1.905
Zoom of the current in the coil during charge.
The maximum current in the low inductance coil is almost
seven times higher than for the high inductance coil. It is
also evident that the maximum energy in the 12 H-coil and
the 1.8 H-coil are quite similar. The decrease in the current
during the steady state period is very large for the 0.18 H-coil
and the current decrease is also present for the two others.
These losses comes from the path the current will have to
flow during steady state, and the fact that it is difficult to tune
the output from the generator to be exactly similar to the load
power and thereby the power reference equal to zero.
Fig. 11 shows the power exchange with the interconnected
power grid. It is evident that in the case of no SMES the
interconnected network has to absorb or cover the power
fluctuations from the generator. The differences between the
different inductance cases consist of some fluctuations in the
beginning, and a decrease in power at the end of the simulation
time for the 12 H-coil. The reason for this power dip is that
the current in the coil goes under a certain threshold. In order
to deliver the requested power, the DC-link voltage will have
to increase beyond its limit. When this does not occur, the
power output from the SMES decreases. The DC-link voltage
can be increased in order to utilize more of the energy in the
coil. However this is outside the scope of this paper. The 12 Hsetting has the largest fluctuations in the power exchange. This
is due to the longer settling time of the DC-link voltage when
the inductance is large.
1.2
L = 0.18 H
L = 1.8 H
L = 12 H
No SMES
1
0.8
Power (MW)
0.6
0.4
0.2
0
-0.2
-0.4
0
Fig. 11.
0.5
1
1.5
2
2.5
3
3.5
Time (s)
4
4.5
5
5.5
The power exchange with the interconnected power grid.
6
The current in the SMES coil is the constraining factor on
the switching units. The simulations show that the maximum
current is around 1 kA. A current of this magnitude will not
make any difficulties regarding the availability of devices.
Semiconductors like the ones used in this system can handle
up to 2.4 kA [11] when it comes to IGBTs, and currents
much higher than this when it comes to diodes. The reference
value of the DC-link voltage is 1.1 kV. On the AC side
the peak of the line to line voltage is 976 V. Neither the
voltage magnitudes make any difficulties when it comes to
the availability of devices. An IGBT having a current rating
of 2400 A and voltage rating of 1700 V [12] will fulfil the
requirements in the operation. It will also introduce safety
margins. The constraining factor in the SMES coil is the current. The maximum current is called its critical current. Above
this current the coil will lose its superconductivity. Therefore
it is important to stay below this limit and include a safety
margin [2]. The coil inductance will influence the amount
of stored energy, and is a parameter which is determined by
the number of turns, the cross sectional area, and the length
of the wire [10]. The inductance of the coil in this system
has been chosen to be fairly low because the unit is used to
compensate power fluctuations and thus the stored energy level
is not the highest priority. An inductance of 1.8 H has through
simulations proved to be a good choice for this purpose.
VI. C ONCLUSION AND FURTHER WORK
In this paper a power conditioning system for a SMES coil
has been studied for load leveling in a power system with
renewable energy sources. The energy storage system has been
connected in shunt with the power grid. A comparison between
three different inductance values of the SMES-coil has also
been performed. From the comparison the 1.8 H-coil proved
to be the most suitable. The energy level in this coil was
slightly less than for the 12 H-coil, but the large inductance
coil was not able to deliver the requested power for the entire
simulation. The small inductance coil introduced too high
current in the DC-link. The control system of the converter has
been divided into two parts. One PI-regulator controlling the
DC-voltage with the DC chopper and two cascaded regulators
where the outer one is controlling the power flow in the SMES
and the inner regulator controls the current in the AC-DC
converter. This division ensures a faster reaction time from
the controllers than if all the regulators where connected in
series. The simulation results show that the SMES will relieve
the strain on the connection to the interconnected grid and
work as a supplementary power source when the power from
the induction generator fluctuates as when coming from wind
or wave sources. Further work which can be done involves
improving the steady state response of the SMES current. A
current source converter topology replacing the voltage source
converter topology and DC-chopper will also be investigated.
Different connection strategies of the SMES should also be
investigated. This includes series compensation instead of
shunt compensation and both shunt and series compensation
at the same time.
2491
6
A PPENDIX
B LOCK DIAGRAMS FOR THE REGULATORS
Vdc,ref,pu
−
Fig. 12.
vs
Kpv,pu 1+T
Tv s
P I−controller
1
1+Ta s
ωb Cpu
s
DC−chopper System
R EFERENCES
Vdc,pu
The DC-voltage controller.
TABLE III
T HE PARAMETERS IN THE DC- VOLTAGE CONTROLLER
Parameter
Kpv,pu
Tv
Ta
ωb
Cpu
iref
−
Fig. 13.
Value
63.48
0.0016
1
T
= 0.0001
2 switch
100π
0.125358336
is
Kpi,pu 1+T
Ti s
1
1+Ta s
1
1
Rpu 1+τpu
P I−controller
V SC
System
i
The inner current controller.
TABLE IV
T HE PARAMETERS IN THE INNER CURRENT CONTROLLER
Parameter
Kpi,pu
Ti
Ta
Rpu
τpu
Pref
−
Fig. 14.
Kpp,pu
[1] J. Kondoh, I. Ishii, H. Yamaguchi, A. Murata, K. Otani, K. Sakuta,
N. Higuchi, S. Sekine, and M. Kamimoto, “Electrical energy storage
systems for energy networks,” Energy Conversion & Management,
vol. 41, pp. 1863–1874, February 2000.
[2] J. Bray, “Superconductors in applications; some practical aspects,” IEEE
Transactions on Applied Superconductivity, vol. 19, pp. 2533–2539, June
2009.
[3] T. Katagiri, H. Nakabayashi, Y. Nijo, T. Tamada, T. Noda, N. Hirano,
T. Nagata, S. Nagaya, M. Yamane, Y. Ishii, and T. Nitta, “Field test
result of 10mva/20mj smes for load fluctuation compensation,” IEEE
Transactions on Applied Superconductivity, vol. 19, pp. 1993–1998, June
2009.
[4] P. Tixador, “Superconducting magnetic energy storage: Status and perspective,” IEEE/CSC & ESAS European superconductivity news forum,
January 2008.
[5] D. Casadei, G. Grandi, U. Reggiani, and G. Serra, “Analysis of a
power conditioning system for superconducting magnetic energy storage
(smes),” in IEEE International Symposium on Industrial Electronics,
1998. Proceedings. ISIE ’98., vol. 2, pp. 546–551 vol.2, Jul 1998.
[6] C. Hawley and S. Gower, “Smes pcs topology design - a critical comparison of inverter technologies,” tech. rep., School of Electrical, Computer
and Telecommunications Engineering, University of Wollongong, 2002.
[7] J. ichi Itoh, I. Sato, A. Odaka, H. Ohguchi, H. Kodachi, and N. Eguchi,
“A novel approach to practical matrix converter motor drive system with
reverse blocking igbt,” IEEE Transactions on Power Electronics, vol. 20,
pp. 1356–1363, Nov. 2005.
[8] A. Esmaieli, S. Niaki, A. Tajfar, and H. Nademi, “Unified modeling of
upfc-smes in power system application,” in Industrial Electronics and
Applications, 2008. ICIEA 2008. 3rd IEEE Conference on, pp. 2051–
2056, June 2008.
[9] V. Blasko and V. Kaura, “A new mathematical model and control of
a three-phase ac-dc voltage source converter,” IEEE Transactions on
Power Electronics, vol. 12, pp. 116–123, Jan 1997.
[10] H. D. Young and R. A. Freedman, Sears and Zemansky’s University
Physics with Modern Physics. Pearson Addison Wesley, 11 ed., 2004.
[11] V. K. Khanna, IGBT Theory and Design. Wiley-Interscience, 2003.
[12] ABB, ABB HiPak IGBT Module datasheet.
Value
15.9156
0.0849
1
T
= 0.0001
2 switch
0.00375
0.08488
1+Tp s
Tp s
P I−controller
1
1+Teq s
vd
P
Inner
current
controller
The outer power controller.
TABLE V
T HE PARAMETERS IN THE OUTER POWER CONTROLLER
Parameter
Kpp,pu
Tp
Teq
Rpu
vd
Value
4
0.0032
2Ta = 0.0001
0.00375
≈1
2492
 in power")