DC-Arc Models and Incident-Energy Calculations
advertisement

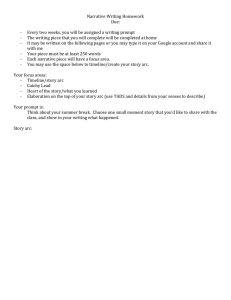
1810 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 46, NO. 5, SEPTEMBER/OCTOBER 2010 DC-Arc Models and Incident-Energy Calculations Ravel F. Ammerman, Senior Member, IEEE, Tammy Gammon, Senior Member, IEEE, Pankaj K. Sen, Senior Member, IEEE, and John P. Nelson, Fellow, IEEE Abstract—There are many industrial applications of large-scale dc power systems, but only a limited amount of scientific literature addresses the modeling of dc arcs. Since the early dc-arc research focused on the arc as an illuminant, most of the early data was obtained from low-current dc systems. More recent publications provide a better understanding of the high-current dc arc. The dc-arc models reviewed in this paper cover a wide range of arcing situations and test conditions. Even with the test variations, a comparison of dc-arc resistance equations shows a fair degree of consistency in the formulations. A method for estimating incident energy for a dc arcing fault is developed based on a nonlinear arc resistance. Additional dc-arc testing is needed so that more accurate incident-energy models can be developed for dc arcs. Index Terms—DC-arc modeling, dc-arc resistance, dc incidentenergy calculations, dc-system hazard risk category evaluation, free-burning arcs in open air, volt–ampere (V –I) characteristics. Fig. 1. Series-electrode arc classification [2]. I. I NTRODUCTION A RC physics is complex, and the physical constants are particularly hard to clearly define for real-world arcing faults in power systems. Therefore, the present knowledge has been largely developed based on the observation and analysis of electrical measurements. The volt–ampere (V –I) characteristics of electric arcs, which are dependent on test parameters, are essential to defining the complex arc phenomenon in power systems. Early researchers often failed to specify test conditions, the configuration type, and if ac or dc arcs had been initiated. Since the V –I characteristic is dependent on test conditions, including gap width and relative current magnitude, it can be difficult to assess the early published work for accuracy and coherence. High current magnitudes (on the order of kiloamperes), typical of arcing faults in power systems, are commonly viewed as being quasi-stationary because the large thermal inertia in the arc discourages changes in arc temperature and conductance. Even though the dynamic nature of the arc generates a time-varying arc length, arc voltage equations have been Manuscript received June 22, 2009; accepted January 24, 2010. Date of publication July 12, 2010; date of current version September 17, 2010. Paper 2009-PCIC-185, presented at the 2009 IEEE Petroleum and Chemical Industry Technical Conference, Anaheim, CA, September 14–16, and approved for publication in the IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS by the Petroleum and Chemical Industry Committee of the IEEE Industry Applications Society. R. F. Ammerman and P. K. Sen are with Colorado School of Mines, Golden, CO 80401 USA (e-mail: rammerma@mines.edu; psen@mines.edu). T. Gammon is with John Matthews & Associates, Cookeville, TN 38502 USA (e-mail: tgammon@tds.net). J. P. Nelson is with NEI Electric Power Engineering, Arvada, CO 80001 USA (e-mail: jnelson@neiengineering.com). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIA.2010.2057497 developed from the quasi-stationary V –I characteristics. This paper provides an overview of the most commonly used and published arc equations and develops dc-arc-resistance models. A simulation study is performed to compare the formulas which are relevant with present dc-arc research. Additionally, based on these models, dc arcing-fault incident-energy calculations are presented to assess the level of risk involved when working around high-current dc apparatus. The discussion begins with a brief summary of free-burning arcs in open air. II. F REE -B URNING A RCS IN O PEN A IR As Sweeting and Stokes observed, “The vast majority of the literature deals with arcs that have been constrained or stabilized.” They also noted that “The bulk of the arc literature is based on single-phase opposing electrodes, where the current comes from one side and flows across to the other side” [1]. Series electrodes have historically received the majority of attention because this is the configuration utilized to design power-system protective devices like circuit breakers and fuses. In this context, arcs are often divided into two main categories: axisymmetric and nonaxisymmetric. An axisymmetric arc burns uniformly, while nonaxisymmetric arcs are either in a “state of dynamic equilibrium or continuous motion” [2]. Fig. 1 shows some of the commonly used arc classifications. The “wall-stabilized” arc is constrained to a cylindrical shape. At low currents (below 10 A), the geometry of a freeburning arc would look similar to the diagram on the right side of the figure. As shown, the actual arc length is longer than the electrode gap. Convective forces cause the arc plasma to bow upward; the resulting shape helps to explain the origin of the term “arc” used to describe this complex electrical phenomenon. 0093-9994/$26.00 © 2010 IEEE AMMERMAN et al.: DC-ARC MODELS AND INCIDENT-ENERGY CALCULATIONS 1811 TABLE I STROM’S AVERAGE VOLTAGE GRADIENT [6] Fig. 2. Electric-arc characterization [3], [4]. Free-burning arcs in open air are the exclusive focus of this paper. In industrial applications, high-current free-burning arcing faults are extremely chaotic in nature. The arc moves rapidly so that its length and geometry are constantly changing. The contributing factors to the dynamic nature of high-current free-burning arcs are the following: 1) 2) 3) 4) 5) Fig. 3. Arcing voltage and current characteristic [5], [7]. thermal convection; electromagnetic forces; burn back of electrode material; arc extinction and restriking; plasma jets. III. C HARACTERISTICS OF AN A RC As shown in Fig. 2, an arc consists of three regions: the anode region, the plasma column, and the cathode region. The electrode regions (anode and cathode) form the transition regions between the gaseous plasma cloud and the solid conductors. As shown in Fig. 2, an arc is also commonly associated with a voltage profile. The voltage gradient across the arc plasma depends on the actual arc length; the arc may deviate from the gap width between the electrodes. Less deviation is expected for short gap widths, series electrodes, and less turbulent conditions. A number of researchers have postulated that the voltage gradient in the plasma column of an arc is nearly independent of the arcing current. For example, Browne found that the voltage gradient in the arc column is nearly independent of the arc current for magnitudes above 50 A and is approximately 12 V/cm (30.5 V/in) for arcs in open air [5]. Browne’s research investigated arc behavior in both dc and ac circuits. In 1946, Strom published that “the voltage gradient in the arc is affected very little by current magnitude” [6]. Strom found that, for arc gap widths from 0.125 to 48 in (0.32 to 122 cm), the arc voltages averaged 34 V/in (13.4 V/cm) during arc tests, which produced peak ac currents ranging from 68 to 21 750 A. Table I summarizes the results of Strom’s findings. These numbers are comparable to Browne’s finding. Fig. 4. DC-arc test circuit configuration [8]. A. Arc V –I Characteristics Fig. 3 shows the quasi-static V –I characteristic for an arc of “fixed” length. In the low-current region (identified by the dotted line), the arc voltage drops as the arc current increases; as a result, the arc power (P = V I) tends to remain relatively constant in this region. For “larger” currents, the arc voltage increases slightly with increasing arc current. (A transition current, which defines the boundaries between the low- and high-current regions, is presented later). With wall-stabilized arcs, the arc plasma is only partially ionized in the low-current region, whereas the plasma becomes fully ionized above some threshold current [2]. A similar transition in the level of ionization is observed for free-burning arcs. B. Arc Modeling Using Static V –I Characteristics Fig. 4 shows a typical test circuit used to measure the characteristics of a dc arc. In this diagram, the gap width, not the actual arc length, between the electrodes is labeled as “L.” The arc length is difficult to measure. Many equations 1812 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 46, NO. 5, SEPTEMBER/OCTOBER 2010 Fig. 5. DC equivalent-circuit model. use arc length. A number of experimenters probably assumed that the arc length was equal to the gap width. The length of the arc approximates the gap width when series electrodes, low currents, and short gap widths are involved. Otherwise, the arc length may be considerably longer than the gap width. In many early papers, it is not clear when arc length is defined as an equation parameter if the equation is based on the gap width or an estimated arc length. Most equations are probably based on gap width since gap width is a measurable parameter. However, it must be remembered that the impedance of the arc is governed by the actual arc length. The arc’s physical processes are complex and chaotic in nature, and it is very difficult to develop theoretical models using arc physics. Consequently, an arc is often represented with an equivalent electrical circuit (a “black-box” approach). In some cases, this representation is sufficient because the objectives are to determine arc current, power, and energy. Fig. 5 shows the simplified dc equivalent-circuit representation of the arc. Fig. 6. Sample of arc characteristic curves [8]. B. Steinmetz Equation In 1906, Steinmetz derived a semiempirical V –I equation based on carbon and magnetite arc experiments [10] Varc = A + C(L + D) . 0.5 Iarc (2) In (2), A, C, and D are constants, and L is the arc length. For a 25.4-mm (1-in) arc with carbon electrodes, the equation is defined as Varc = 36 + 130(1 + 0.33) . 0.5 Iarc (3) C. Nottingham Equation IV. DC-A RC V –I C HARACTERISTICS AND E QUATIONS Much of the early arc research was focused on the use of an arc as an illuminant. Low-current arcs were relatively stable, while their high-current counterparts were considered unpredictable and dangerous. This belief, coupled with the availability of low-power dc supplies, explains why most early arc research focused on low-current dc arcs, which exhibited inverse V –I characteristics. This section highlights some of the early and selected key publications; it also provides a comparison of methods used to model a dc arc. A. Ayrton Equation Ayrton formulated the first known equation used to model the electrical properties of a steady-state arc [9]. Developed in 1902, (1) was derived for arcs in air initiated between carbon electrodes separated by a few millimeters Varc = A + BL + C + DL . Iarc (1) The constant A represents the electrode voltage drop, B describes the voltage gradient, and L is the arc length; C and D are constants, which model the arc’s nonlinear characteristic. In the mid 1920s, Nottingham conducted arc research that produced a similar inverse characteristic [11] Varc = A + B . n Iarc (4) The constants A and B are dependent on the arc length and the electrode material. The arc current is raised to a power n, where n varies as a function of the electrode material. For arc lengths ranging from 1.0 to 10.0 mm (0.0394 to 0.394 in), the equation for copper electrodes is specified in (5). Also, note that the exponent n is different from the previous two equations 44 (5) Varc = 27.5 + 0.67 . Iarc Fig. 6 shows a sample of some typical V –I characteristics of arcs with 6-mm (0.236-in) arc lengths and different electrodes. For constant arc lengths, the Nottingham equation has the same general structure as the Ayrton and Steinmetz formulas. The early arc formulas are based on a limited number of low-current test results. The empirical constants were actually dependent on electrode materials, gap lengths, and gaseous mediums. No standard testing procedure had been established, and experimental procedures did not follow consistent testing protocols. Consequently, many of the findings have been considered inconclusive. AMMERMAN et al.: DC-ARC MODELS AND INCIDENT-ENERGY CALCULATIONS 1813 D. Van and Warrington Equation In 1931, Van and Warrington performed a series of tests on high-voltage ac systems for arcing currents between 100 and 1000 A and electrode distances which spanned several feet [12]. The V –I characteristic of a stable arc was determined as Varc = 8750L . 0.4 Iarc (6) In (6), L is the arc length in feet. Van and Warrington confirmed the early research performed by Ayrton and Steinmetz by showing that arc voltages are proportional to the arc length and decrease with increasing arcing current. The inverse characteristic was probably exhibited in this current range because of the large gap distance between the electrodes. E. Miller and Hildenbrand Fig. 7. DC-arc voltage versus current in 9.5-mm (3/8 in) gap [16]. In 1972, Miller and Hildenbrand published a dc-arc model based on an energy-balance concept [13]. As a first approximation, they recommended using the empirical relationship in (4) developed by Nottingham. They emphasized that A, B, and n are not absolute constants but depend on the arc conditions, specifically, electrode material, arc length, and gas species and pressure. Furthermore, they referenced Cobine’s statement that constants are difficult to accurately determine even for a given set of conditions [14]. Ignatko conducted a series of ac-arc tests which generated arc currents ranging from 5 to 150 kA for arc gaps between 5 and 200 mm (0.197 and 7.87 in). Ignatko determined that the total electrode (cathode and anode) drop remained practically constant and measured 23.5 V for copper, 26.5 V for steel, and 36 V for tungsten [15]. Ignatko’s results confirm earlier work reporting a 20- to 40-V drop at the electrodes [5]. F. Hall, Myers, and Vilicheck In 1978, a group of researchers conducted tests to evaluate faults on dc trolley systems [16]. Over 100 dc-arc tests were conducted using a 300-V dc supply. Arcing currents ranged from 300 to 2400 A, and electrode gap widths ranged from 4.8 to 152 mm (3/16 to 6 in). The relationship between the arc voltage and the arc current, shown in Fig. 7, is based on a number of arc tests with a 9.5-mm (3/8 in) gap. The relationship between the arc current and the arc voltage in a dc trolley system was determined to match the form defined in (4). G. Stokes and Oppenlander Model Stokes and Oppenlander performed perhaps the most exhaustive study of free-burning vertical and horizontal arcs between series electrodes in open air [17]. “Current and voltage signals have been recorded for arcs burning with exponentially decaying currents from 1000 to 0.1 A, and 50-Hz arcs for sinusoidal currents with amplitudes decaying from 20 kA to 30 A [17].” Figs. 8(a) and (b) and 9 show that the minimum voltage needed to maintain an arc depends on current magnitude, gap width, and orientation of the electrodes. Stokes and Fig. 8. (a) Minimum arc voltage for horizontal arcs [17]. Minimum voltage characteristics for copper electrodes. Continuous lines are measured. Broken lines are calculated based on power characteristics. Gap widths for curves from bottom to top: 5, 20, 100, and 500 mm (0.20, 0.79, 3.94, and 19.7 in). (b) Minimum arc voltage for horizontal arcs [17]. Stokes and Oppenlander data presented on a linear scale (500-mm (19.7-in) gap). Oppenlander formulated the minimum arc voltages for series electrodes. DC arcs in an industrial setting are likely to be initiated between parallel electrodes, which are characterized by longer arc lengths and higher arc voltages. 1814 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 46, NO. 5, SEPTEMBER/OCTOBER 2010 Fig. 10. Paukert’s compilation of arcing-fault data [18]. Fig. 9. Minimum arc voltage for vertical arcs [17]. Minimum voltage characteristics for aluminum electrodes. Continuous lines are measured. Broken lines are calculated based on power characteristics. Gap widths for curves from bottom to top: 5, 20, 100, and 500 mm (0.20, 0.79, 3.94, and 19.7 in). TABLE II EMPIRICAL ARC FORMULAS FOR Iarc < 100 A [18] The current associated with the transition point for each gap width is clearly marked on the figures by the solid line with dots. The transition current is defined as It = 10 + 0.2zg , where the length of the gap zg is expressed in millimeters [17]. The curves show the inverse V –I characteristic for an arc with a current that is lower than the transition point. For currents above the transition point, the arc voltage shows a very slow rise in voltage values. Stokes and Oppenlander modeled the arc voltage for arcing currents above a transition point. “This set of data, totaling some two million current and voltage points, was reassembled to current–voltage characteristics [17].” The result is 0.12 . Varc = (20 + 0.534zg )Iarc (7) TABLE III EMPIRICAL ARC FORMULAS FOR 100 A < Iarc < 100 kA [18] Equation (7), written in terms of arc resistance, becomes Rarc = 20 + 0.534zg . 0.88 Iarc (8) H. Paukert’s Compilation of LV Arcing-Fault Data Paukert compiled published arcing-fault data from seven researchers who conducted a wide range of arc tests. Some tests were dc, and some tests were ac. Some configurations were vertical, and others were horizontal. Arcing currents ranged from 0.3 A to 100 kA, and electrode gaps ranged from 1 to 200 mm (0.039 to 8 in) [18]. The survey data are summarized in Fig. 10. Based on the collected data, Paukert formulated arc-voltage and arc-resistance equations for various electrode gap widths; these equations are listed in Tables II and III. Table II presents an inverse V –I characteristic for low-current arcs, and Table III presents positive V –I characteristic for currents above 100 A. Good agreement was found between the measurements of Stokes and Oppenlander and the test results compiled by Paukert, as shown in Fig. 11(a) and (b). The best agreement is found in the higher current range, which is greater than 100 A. Paukert concludes his analysis with the following words: “Al- though the author’s approximation formulas for minimal arc voltage and minimal arc resistance have been found to be in good agreement with other authors’ results, the uncertainty connected with the determination of actual arc length will hamper their successful application for exact calculation [18].” I. Sölver Like earlier researchers, Sölver recognized the complexity of the relationship between the arc current, arc voltage, AMMERMAN et al.: DC-ARC MODELS AND INCIDENT-ENERGY CALCULATIONS 1815 arc voltage is primarily determined from the electrode voltage drops, which is around 20 V. “When the arcs are long and the current is not too low, the arc voltage tends to be on the order of 10 V/cm [20].” The dc-arc models presented in this section share the following characteristics. 1) Arc resistance is nonlinear. 2) Arc resistance is dependent on multiple factors: a) gap length; b) electrode material; c) arc-current magnitude; d) electrode configuration. The need for additional testing is evident. More testing would lead to the development of better equations for dc arcing and dcarc resistance. Section V provides a comparative analysis of the existing arc-resistance equations. V. A RC -R ESISTANCE M ODEL C OMPARATIVE S TUDY Fig. 11. (a) Comparison of V –I characteristic formulas for vertical arcs [18]: full lines—measurements of Stokes and Oppenlander [17], very full thick lines—Paukert [18], and broken lines–theory of Lowke [19]. (b) Comparison of V –I characteristic formulas for horizontal arcs [18]: full lines—measurements of Stokes and Oppenlander [17], very full thick lines—Paukert [18], and broken lines—theory of Lowke [19]. Fig. 12. Current–voltage characteristics for dc arcs in air, with copper electrodes [20]. and arc length. Fig. 12 shows experimental results for dc arcs between copper electrodes separated by widths of up to 200 mm (7.87 in). For lower current values, the arc voltage has an “inverse” relationship with the arc current; as the arc currents increase, the arc voltages tend to flatten and become relatively constant (independent of the current). When the arc is short, the The following models are used in the comparative study to calculate arc resistance. The models developed by Paukert and by Stokes and Oppenlander are included because they represent a large number of test data, including dc arcs. 1) Nottingham: Equation (5), based on test data from dc arcs, with lengths ranging from 1.0 to 10.0 mm (0.0394 to 0.394 in). His sample curves show arc currents up to 10 A. 2) Stokes and Oppenlander: Equation (8), based on exponentially decaying dc currents from 1000 to 0.1 A and decaying single-phase 50-Hz amplitudes from 20 kA to 30 A. The gap widths ranged from 5 to 500 mm (0.20 to 19.7 in) between series electrodes. Copper electrodes were tested in a horizontal configuration, and aluminum electrodes were tested in a vertical configuration. 3) Paukert: (Table III), based on test data from dc and singlephase ac arcs. Based on readings of Fig. 10, the dc-arc tests were conducted for arc currents of up to approximately 50 A (covered in Table II only). Rieder initiated dc arcs between copper electrodes spaced between 1 and 160 mm (0.0394 and 6.30 in). Figs. 13 and 14 show comparisons between the arc-resistance formulas. Fig. 13 shows a comparison of the three approaches for a gap length of 10 mm (0.394 in). The Nottingham formula described in (5) is only applicable to electrode gaps in the range of 1–10 mm (0.0394–0.394 in), so it is not included in the sensitivity study shown in Fig. 14. Fig. 15 shows the relationship between arc resistance, gap length, and sensitivity to arc current. Fig. 13 shows that the three models are somewhat consistent. Fig. 14 shows that the V –I relationships developed by Paukert and by Stokes and Oppenlander exhibit more deviation with large gap widths. Some additional observations include the following. 1) Arc resistance is nonlinear. 2) Arc resistance decreases with increasing arc current. 3) Arc-resistance drop approaches a constant value at high current magnitudes. 1816 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 46, NO. 5, SEPTEMBER/OCTOBER 2010 4) Arc resistance changes rapidly at low current magnitudes (< 1 kA). 5) Paukert predicts larger arc resistances (almost by a factor of 1.5) than what Stokes and Oppenlander predict. 6) For a given arc current, the arc resistance increases linearly with the electrode gap. VI. A RC E NERGY The law of “conservation of energy” principle requires that energy is conserved during an arcing fault; therefore, the electrical energy input is equal to the energy released in the form of heat, pressure, sound, light, and electromagnetic radiation. Arc-resistance models may be a convenient way to estimate the electrical energy delivered during an arcing fault. A. Theoretical Arc-Energy Fundamentals Fig. 13. DC-arc resistance comparative study (10-mm electrode gap). For steady-state dc systems, power is determined as follows: Power = Vdc Idc . (9) Generally speaking, the power for dc or single-phase ac arcs can be expressed as 2 Parc = Varc Iarc = Iarc Rarc . (10) Since energy is a function of time, the energy associated with an arc is approximated as 2 Rarc tarc . Earc ≈ Iarc (11) The arc duration (tarc ) is measured in seconds. It should be noted that dc arcs do not pass through current zero every half cycle, which makes low voltage (LV) single-phase ac arcs susceptible to self-extinction [21]. B. DC-Arc Incident-Energy Estimates Fig. 14. DC-arc resistance comparative study (sensitivity to electrode gap). Since electric arcs involve extremely complex processes, modeling electric arcs with theoretical physics is difficult, and model parameters depend on test and environmental conditions. Arcing faults in an industrial workplace may be initiated under a wide range of conditions. Arcing, by nature, is a dynamic process, and industrial arcing faults are much more dynamic, random, and turbulent than constrained arcs initiated in a controlled environment (for example, a laboratory setup). Consequently, semiempirical models are an effective way of modeling arcing faults in power systems and calculating incident energy. 1) Open-Air Arc Exposures: A large battery-bank installation in a nuclear power plant is an example of an open-air dc-arc flash hazard. For this type of exposure, the heat transfer depends on the spherical energy density, as described in (12), where d represents the distance from the arc (in millimeters). Es = Fig. 15. DC-arc resistance comparative study (Stokes and Oppenlander/ Paukert formula comparison). Earc . 4πd2 (12) This formula is based on radiant-heat transfer, and not all arc energy will be transferred as radiant heat. In (12), the energy density varies with the inverse square of the distance from the arc source. AMMERMAN et al.: DC-ARC MODELS AND INCIDENT-ENERGY CALCULATIONS 1817 TABLE IV OPTIMUM VALUES OF a AND k [22] Fig. 17. Incident energy (arc-in-a-box) versus arc duration for 32-mm (1.25-in) gap and 457-mm (18-in) working distance. Fig. 16. Incident energy (open air) versus arc duration for 32-mm (1.25-in) gap and 457-mm (18-in) working distance. 2) Arc-in-a-Box Exposures: When a dc arc is initiated within a piece of switchgear, the enclosure tends to have a focusing effect on the incident energy. Wilkins proposed an approach for three-phase ac arcs where the spherical energydensity component is replaced by a value E1 that takes into account the focusing effect of an enclosure [22]. In other words, the term E1 also represents the additional energy reflected by the back and sides of the enclosure E1 = k Earc . a2 + d2 (13) Table IV lists Wilkins’ optimum values of a and k for the three equipment classes described in the IEEE 1584 guide [23]. The use of (12) and (13) to compare the arcs initiated in enclosures with those in open-air arc exposures shows that the arc-in-a-box case results in an increase of incident energy directed toward a worker. C. DC-Arc Incident-Energy Release Figs. 16 and 17 approximate the incident energies associated with dc arcing faults of 2, 6, and 10 kA across a gap of 32 mm (1.25 in). The arc power was calculated from the arc-resistance equation (8). Incident energy at 457 mm (18 in) was determined by (12) and (13). The LV switchgear values for a and k in Table IV were used to calculate the incident energies associated with an enclosure. The resulting incident-energy levels are compared with the hazard risk categories defined in National Fig. 18. DC system one-line diagram. Fire Protection Association 70E [24]. For the selected enclosure type and test distance, the incident energies calculated for enclosures are 2.2 times larger than the incident energies calculated for open air. VII. DC D ISTRIBUTION S YSTEM : C ASE S TUDIES Two case studies of a large power plant illustrate a method for estimating the potential dc-arc flash hazard associated with high-current batteries. The one-line diagram in Fig. 18 shows operational units feeding a 250-V dc bus through rectifiers. The bus is backed up with 258-V battery banks. The dc-supply sources include batteries, rectifiers, and battery chargers; any of these sources might sustain a dc arcing fault, depending on system operating conditions and the fault location. The dc bus serves a variety of loads, such as motors, inverters, relay coils, and lamps. For the fault calculations presented in this section, it is assumed that a fault occurs on the dc bus while being supplied 1818 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 46, NO. 5, SEPTEMBER/OCTOBER 2010 Fig. 19. Double-string battery circuit model. TABLE V DC SYSTEM SPECIFICATIONS AND PARAMETER VALUES Fig. 20. Incident energy (open air) versus arc duration for 20-mm (0.79 in) gap and 457-mm (18 in) working distance. TABLE VI ITERATIVE SOLUTION RESULTS by the battery bank. It is further assumed that the fault-current contribution from any dc motors is negligible. The dc steadystate circuit model for the double-string battery system is shown in Fig. 19. For the single-string system, one battery is removed. Table V lists the system specifications and circuitmodel parameters for the case studies. The reactive (inductive and capacitive) dynamic response of the batteries lasts approximately 15 ms after the fault occurs and is neglected [25]. The effect of the battery charger is also transitory and neglected in the calculations. Furthermore, any nonlinear battery-discharge characteristics are not considered in this work. The bolted-fault currents, listed in Table VI and associated with the double-string and single-string battery banks, were calculated using the nominal battery voltage and the total system resistance. The arcing-fault current for each case was determined using an iterative solution of (8) and the circuit model shown in Fig. 19. As an initial guess, the arc current was set to be equal to 50% of the bolted-fault current and converged rapidly. The arc gap width was defined as 20 mm since a 250-V source has limited voltage potential to sustain arcs across large gap widths. The arc current and arc resistance for each system are provided in Table VI. For the single-string and double-string systems, the battery banks lack upstream overcurrent circuit protective devices, so immediate dc-arc interruption is not likely for sustainable gap widths. Equations (11) and (12) were used to calculate the incident energies at 457 mm (18 in). The incident energies, plotted as a function of time and shown in Fig. 20, merit concern. In particular, the magnitude of the incident energy for the double-string battery bank increases quickly as a function of time and reaches Hazard Category 4 soon after 1.1 s. A higher risk of serious burn is certainly associated with the doublestring battery bank. These cases were calculated for a dc arcing fault which occurs at the 250-V bus. However, if an arcing fault initiates between battery terminals, chemical burns present an additional hazard. VIII. C ONCLUSION The models presented in this paper have been based on tests conducted over more than a century by different researchers in different countries and under very different protocol. Considering the wide range of testing methods and conditions, the results are remarkably similar. At low current levels, the V –I characteristic is inversely proportional and nonlinear. At high arcing-current levels, the analysis in this paper has shown that the arc-resistance voltage-drop approaches a constant value. In an effort to quantify the risks associated with high-current dc systems, a method has been presented to estimate the incidentenergy levels possible during an arcing fault. Results from a case study demonstrated that the risks associated with highcurrent dc systems may be significant. Arcing behavior is highly variable, and the existing dcarc models cannot accurately and reliably assess all the AMMERMAN et al.: DC-ARC MODELS AND INCIDENT-ENERGY CALCULATIONS characteristics of dc arcs. Additional arc testing is needed to develop more accurate V –I characteristics and better dc-arc resistance models. Extensive testing in a controlled environment is needed to study the incident-energy levels associated with dc arcing faults. A hazard risk assessment is needed to identify where dc arcing faults might be initiated in industrial power systems. The relative severity of the arc flash hazard posed by different types of dc power equipment must be identified. ACKNOWLEDGMENT The authors would like to thank G. Leask of Bruce Power, Ontario, Canada, for his assistance in providing the dc system information presented in the case studies, and to the many reviewers of this paper for their detailed and constructive criticism. R EFERENCES [1] D. K. Sweeting and A. D. Stokes, “Energy transfers within arcing faults in electrical equipment,” in Proc. 8th Int. Conf. Elect. Fuses Appl., Clermont-Ferrand, France, Sep. 2007, pp. 169–178. [2] G. R. Jones, High Pressure Arcs in Industrial Devices. London, U.K.: Cambridge Univ. Press, 1988. [3] M. F. Hoyaux, Arc Physics. New York: Springer-Verlag, 1968. [4] J. M. Somerville, The Electric Arc. London, U.K.: Wiley, 1959. [5] T. E. Browne, Jr., “The electric arc as a circuit element,” J. Electrochem. Soc., vol. 102, no. 1, pp. 27–37, Jan. 1955. [6] A. P. Strom, “Long 60-cycle arcs in air,” Trans. Amer. Inst. Elect. Eng., vol. 65, pp. 113–117, 1946. [7] T. E. Browne, Circuit Interruption Theory and Techniques. New York: Marcel Dekker, 1984. [8] W. B. Nottingham, “Normal arc characteristic curves: Dependence on absolute temperature of anode,” Phys. Rev., vol. 28, no. 4, pp. 764–768, Oct. 1926. [9] H. Ayrton, The Electric Arc. London, U.K.: Electrician, 1902. [10] C. P. Steinmetz, “Electric power into light, Section VI. The Arc,” Trans. Amer. Inst. Elect. Eng., vol. 25, p. 802, 1906. [11] W. B. Nottingham, “A new equation for the static characteristic of the normal electric arc,” Trans. Amer. Inst. Elect. Eng., vol. 42, p. 302, 1923. [12] A. R. Van and C. Warrington, “Reactance relays negligibly affected by arc impedance,” Elect. World, vol. 98, no. 12, pp. 502–505, Sep. 1931. [13] D. B. Miller and J. L. Hildenbrand, “DC arc model including circuit constraints,” IEEE Trans. Power App. Syst., vol. PAS-92, no. 6, pp. 1926– 1934, Nov. 1973. [14] J. D. Cobine, Gaseous Conductors. New York: McGraw-Hill, 1941, pp. 371–378. [15] V. P. Ignatko, “Electric characteristics of ac open heavy-current arcs,” in Proc. 3rd Int. Symp. Switching Arc Phenom., 1977, pp. 98–102. [16] P. M. Hall, K. Myers, and S. W. Vilcheck, “Arcing faults on direct current trolley systems,” in Proc. 50th WVU Conf. Coal Mine Electrotechnol., Morgantown, WV, 1978, pp. 1–19. [17] A. D. Stokes and W. T. Oppenlander, “Electric arcs in open air,” J. Phys. D, Appl. Phys., vol. 24, no. 1, pp. 26–35, Jan. 1991. [18] J. Paukert, “The arc voltage and arc resistance of LV fault arcs,” in Proc. 7th Int. Symp. Switching Arc Phenom., 1993, pp. 49–51. [19] J. J. Lowke, “Simple theory of free burning arcs,” J. Phys. D, Appl. Phys., vol. 12, no. 11, pp. 1873–1886, Nov. 1979. [20] C. E. Sölver, Electric Arcs and Arc Interruption. Götenburg, Sweden: Chalmers Univ. Technol., 2006, EEK 195 High Voltage Technology, Lecture 7. [Online]. Available: http://193.140.122.139/high_voltage/ elkraft/www.elkraft.chalmers.se/GU/EEK195/lectures/Lecture7.pdf [21] T. Gammon and J. Matthews, “Conventional and recommended arc power and energy calculations and arc damage assessment,” IEEE Trans. Ind. Appl., vol. 39, no. 3, pp. 594–599, May/Jun. 2003. [22] R. Wilkins, “Simple improved equations for arc flash hazard analysis,” in Proc. IEEE Elect. Safety Forum, Aug. 30, 2004, pp. 1–12. [23] IEEE Guide for Performing Arc-Flash Hazard Calculations, IEEE Std. 1584-2002, 2004. [24] Standard for Electrical Safety in the Workplace, NFPA 70E-2004, 2009. [25] Battery Short Circuit Current, C&D Technologies, Inc., Blue Bell, PA, Document # RS1468. 1819 Ravel F. Ammerman (SM’09) received the B.S. degree in engineering (electric power/instrumentation) from the Colorado School of Mines, Golden, in 1981, the M.S. degree in electrical engineering (power/control) from the University of Colorado, Denver, in 1987, and the Ph.D. degree in engineering systems (electrical specialty—power systems) from the Colorado School of Mines, in 2008. He has over 28 years of combined teaching, research, and industrial experience. He is currently with the Colorado School of Mines. He has coauthored and published a number of award winning technical articles, published in archival journals. His research interests include arc flash hazard analysis, electrical safety, computer applications in power system analysis, and engineering education. Dr. Ammerman is a member of the IEEE/NFPA Arc Flash Collaborative Research and Testing Project Team. Tammy Gammon (SM’06) received the Ph.D. degree from the Georgia Institute of Technology, Atlanta, in 1999. She was an Assistant Professor with the North Carolina State Engineering Program, University of North Carolina at Asheville, from 1999 to 2003. She has been with John Matthews & Associates, Inc., Cookeville, TN, as a Senior Electrical Engineer since 2003. The firm specializes in forensic engineering (fires of electrical origin, electrical shock, and arc flash burns) and evaluates the safety of electrical products and equipment. The firm is experienced in utility and distribution power issues and in designing electrical and lighting systems for buildings. She is also currently the Research Manager for the IEEE/NFPA Arc Flash Collaborative Research Project. She has taught a wide range of power and mechatronic courses. Dr. Gammon is a Registered Professional Engineer in the State of North Carolina. Pankaj K. (P. K.) Sen (SM’90) received the Ph.D. degree from the Technical University of Nova Scotia (Dalhousie University), Halifax, NS, Canada, in 1974. He has over 44 years of combined teaching, research, and consulting experience. Currently, he is a Professor of engineering and the Site Director for the NSF Power Systems Engineering Research Center (www.PSerc.org), Colorado School of Mines, Golden. He has published over 120 papers on a variety of subjects related to power systems engineering, electric machines and renewable energy, protection, grounding, and safety and has supervised over 120 graduate students. His current research interests include application problems in power system engineering, renewable energy and distributed generation, arc flash hazard, electrical safety, and power engineering education. He is a member of the IEEE/NFPA Arc Flash Collaborative Research and Testing Project Team. Dr. Sen is a Registered Professional Engineer in the State of Colorado. John P. Nelson (S’73–M’76–SM’82–F’98) received the B.S.E.E. degree from the University of Illinois, Urbana, in 1970, and the M.S.E.E. degree from the University of Colorado, Boulder, in 1975. He is the Founder/CEO of NEI Electric Power Engineering, Inc., Arvada, CO. He spent ten years in the electric utility industry and the last 29 years as an electrical power consultant. He has authored numerous papers (over 30) involving electric power systems, grounding and protection, and protection of electrical equipment and personnel safety. Many of those papers are also published in the IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS and IEEE Industry Applications Magazine. He has taught graduate and undergraduate classes at the University of Colorado, Denver, and Colorado School of Mines, Golden, along with a number of IEEE tutorials and seminars. Mr. Nelson has been active in IEEE Industry Applications Society/ Petroleum and Chemical Industry Committee for 27 years. He is a Registered Professional Engineer in the State of Colorado and numerous other states.