Instantaneous Reactive Power Minimization and Current Control for
advertisement

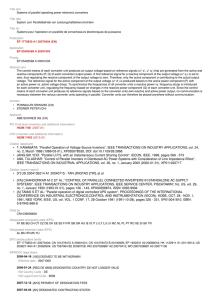
1 Instantaneous Reactive Power Minimization and Current Control for an Indirect Matrix Converter under a Distorted AC-Supply Marco Rivera, Member, IEEE, Jose Rodriguez, Fellow Member, IEEE, Jose R. Espinoza, Member, IEEE, and Haitham Abu-Rub, Senior Member, IEEE Abstract—This paper presents a current control scheme with instantaneous reactive power minimization for an indirect matrix converter. The strategy uses the commutation state of the converter in the subsequent sampling time according to an optimization algorithm given by a simple cost function and the discrete system model. Using this strategy, harmonics in the input current generated by the resonance of the input filter are strongly reduced. Simulation and experimental results with a laboratory prototype are provided in order to validate the control scheme, and the effects of a distorted source voltage and filter resonance are analyzed. Index Terms—AC-AC power conversion, Current control, Matrix converter, Predictive control. N OMENCLATURE is vs ii vi io vo i∗o vdc idc Cf Lf Rf RL LL (α, β) Source current Source voltage Input current Input voltage Load current Load voltage Output current reference dc-link voltage dc-link current Filter capacitor Filter inductor Filter resistor Load resistance Load inductance Stationary coordinates [isA isB isC ]T [vsA vsB vsC ]T [iA iB iC ]T [vA vB vC ]T [ia ib ic ]T [van vbn vcn ]T [i∗a i∗b i∗c ]T Copyright (c) 2012 IEEE. Personal use of this material is permitted. However, permission to use this material for any other purposes must be obtained from the IEEE by sending a request to pubspermissions@ieee.org. This work was supported by the Centro Cientı́fico-Tecnológico de Valparaı́so (CCTVal) N◦ FB0821, the Universidad Técnica Federico Santa Marı́a, FONDECYT Project 1110794 and NPRP grant 4-0772-028 from the Qatar National Research Fund (a member of Qatar Foundation). The statements made herein are solely the responsibility of the authors. M. Rivera and J. Rodriguez are with the Electronics Engineering Department, Universidad Técnica Federico Santa Marı́a, Av. España 1680, Valparaı́so, 2390123 Chile, (e-mail: marco.rivera@usm.cl; jrp@usm.cl). J. R. Espinoza is with the Department of Electrical Engineering, Universidad de Concepción, Concepción, (e-mail: jose.espinoza@udec.cl). H. Abu-Rub is with Texas A&M University at Qatar, Doha, Qatar, (e-mail: haitham.abu-rub@qatar.tamu.edu) . I. I NTRODUCTION Within the family of ac-ac converters it is possible to distinguish two main groups: the converters with energy storage or dc-link and those without. In the first group are the current and voltage source topologies, with which it is possible to obtain ac-ac conversion taking into consideration the presence of a capacitive or inductive dc-link, respectively. These structures have been widely studied and they are the converters used in the industry today. In the group of ac-ac circuits without dc-link, different topologies have been reported in the literature and are classified into three main groups: the cycloconverter in a wide power variety, the direct matrix converter (DMC) and the indirect matrix converter (IMC), both in low power range [1]. The cycloconverter is very common in high power applications such as ball mills in mineral processing and cement kilns. However, it is severely limited in terms of output frequency with respect to the input, because of the presence of a high harmonic content caused by the commutations, which cannot be filtered by the load inductance. The IMC [2], has been subject of investigation for some time. One of the favorable features of an IMC is the absence of a dc-link capacitor, which allows for the construction of compact converters capable of operating under adverse atmospheric conditions such as extreme temperatures and pressures. These features have been explored and are the main reasons why the matrix converter family has been investigated for decades [3]. Compared to a DMC [1], the IMC features an easierto-implement and more secure commutation technique: the dc-link zero current commutation [4]. Moreover, the conventional IMC has bidirectional power flow capabilities and can be designed to have small sized reactive elements in its input filter. These characteristics make the IMC a suitable technology for high efficiency converters for specific applications such as military, aerospace, wind turbine generator systems, external elevators for building construction and skin pass mills, as reported in [5]–[7]. Therefore, these advantages make up for the additional cost of an IMC compared to conventional converters. IMC uses complex pulse width modulation (PWM) and space vector modulation (SVM) schemes to achieve the goal of unity power factor and sinusoidal output current [3], [8]–[21]. The subject of harmonics control in current waveforms of three-phase converters is a very important 2 idc Si1 vs isA N Sr1 Rf Lf vi Si5 A Cf ia iB B iC C Sr4 RL LL a vdc > 0 ib b n ic c Sr6 Sr2 Si4 Fig. 1. Si3 Sr5 iA isB isC Sr3 Si6 Si2 General topology of the indirect matrix converter. and timely topic. In effect, in [22], the reduction of current harmonics is achieved using the theory of instantaneous active and reactive power. Since power converters have a discrete nature, the application of predictive control constitutes a promising and better-suited approach, as compared to standard schemes that use mean values of the variables. Model-based predictive strategy is a powerful kind of control due to the simplicity and effectiveness of its control algorithm [23]. Using an accurate model of the system to be controlled, expressed in terms of space state equations, an optimal switching state from a power electronics converter can be determined to achieve the best response relative to a control variable reference input [24]–[29]. As the IMC is a finite commutation states machine, the predictive control algorithm is simplified to the prediction of every possible switching state and the application of the best suited one to follow certain references. Until today, most of predictive techniques applied to matrix converters have been validated by considering a programmable ac-supply [4], [30], [31], but in the following pages, a more realistic behavior will be presented by considering an ac-supply with low-order harmonics that introduce distortion in both source voltage and currents. II. I NDIRECT M ATRIX C ONVERTER M ODEL A conventional IMC is shown in Fig. 1. For the rectifier side, the dc-link voltage vdc is obtained as a function of the rectifier switches and the input voltages vi as, vdc = Sr1 − Sr4 Sr3 − Sr6 Sr5 − Sr2 vi , (1) and input currents ii are defined as a function of the rectifier switches and the dc-link current idc as, Sr1 − Sr4 ii = Sr3 − Sr6 idc . (2) Sr5 − Sr2 For the inverter side, dc-link current idc is determined as a function of the inverter switches and the output currents io as, idc = Si1 Si3 Si5 io , (3) and finally, output voltages are synthesized as a function of the inverter switches and the dc-link voltage vdc as, Si1 − Si4 vo = Si3 − Si6 vdc . (4) Si5 − Si2 These equations correspond to the nine and eight valid switching states for the rectifier and the inverter stages of a conventional IMC, respectively, as reported in [4]. To comply with the restrictions, the equations have no short circuits in the input and no open lines in the output. Also mandatory for a conventional IMC is to always have a positive dc-link voltage; consequently, the nine rectifier states reduce to only three valid states in every sampling time Ts . In addition, the rectifier includes an Lf Cf filter on the input side which is needed to prevent over-voltages and to provide filtering of the high frequency components of the input currents produced by the commutations and the inductive nature of the load. The filter consists of a second order system described by the following, 1 Rf dis = (vs − vi ) − is , dt Lf Lf (5) 1 dvi = (is − ii ). dt Cf (6) The load model is obtained similarly. Assuming an inductive-resistive load, as shown in Fig. 1, the following equation describes the behavior of the load, dio 1 RL = vo − io . dt LL LL III. C ONTROL S CHEME FOR THE (7) IMC The control scheme for the IMC is represented in Fig. 2. The approach pursues the selection of the switching state of the converter that leads the output currents closest to their respective references at the end of the sampling period. In addition, the instantaneous reactive power on the line side of the rectifier must be minimized. And finally, the dc-link voltage must always be positive [32]. First, the control objectives are determined and the variables necessary to obtain the prediction model are measured and calculated. The model of the system and the measurements are used to predict the behavior of the variables that will be controlled in the subsequent 3 IMC vs is Rf Lf 3 io ii 3 vi input filter 3 3 Cf reactive power prediction qsp 3 cost function optimization 3 3 vs is vi qs∗ LL load io p 8 output current prediction 3 1 3 Fig. 2. gate signals 12 RL 3 vi i∗o 3 io Predictive current control scheme. to produce the lowest error between the desired load current io ∗ and the predicted load current response io in k + 1 sampling time. Hence, if the dynamic model is accurate, the control algorithm will always give the best performance. This very simple and intuitive technique is also highly precise in achieving its goal. A cost function is then defined in order to be able to measure the error between the reference and the predicted load current response. Then, every sample period, this cost function is computed for each possible commutation state on the converter. The one with the smallest error is selected and applied at the beginning of the next sample period. The cost function can be as simple as, △io = (i∗oα − ioα ) + (i∗oβ − ioβ ), sampling time, for each of the valid switching states. The predicted values are then used to evaluate a cost function which deals with the control objectives. After that, the valid switching state that produces the lowest value of the cost function is selected for the next sampling period. In order to compute the differential equations shown in eq. (1)-(7), the general forward-difference Euler formula is used as the derivative approximation to estimate the value of each function one sample time in the future (the variable’s predicted value). A. Input Filter and Load Discrete Equations Below are the predicted values of the input and output side: vi (k + 1) vi (k) vs (k) =Φ +Γ , (8) is (k + 1) is (k) ii (k) where, Φ∼ = eATs , Γ∼ =A −1 (9) (Φ − I2x2 )B. (10) Matrices A and B are given as follows: 0 1/Cf A= , −1/Lf −Rf /Lf (11) B= 0 1/Lf −1/Cf 0 . The load current prediction can be obtained using a forward Euler approximation in eq. (7) such as, io (k + 1) = d1 vo (k) + d2 io (k), (12) where, d1 = Ts /LL and d2 = (1 − RL Ts /LL ) are constants dependent on load parameters and Ts [30]. Note that the currents is (k + 1) and io (k + 1) depend on the switching state through eq. (2) and eq. (4), respectively. B. Cost Function Definition With the discretized system model, including the load, the input filter and the IMC, the implementation of the predictive algorithm is very straight forward. The goal of this method is to always apply the IMC switching state that gives the right voltage space vector vo , in order (13) where ioα and ioβ denote the load current in αβ coordinates for k + 1 sample time, and i∗oα and i∗oβ are their respective references. An extra term can be added to this cost function to minimize other parameters which should be subject to control, such as the instantaneous reactive power consumed by the IMC input along with the filter, the common-mode voltage, the commutation losses, the positive voltage in the dc-link, and so forth. The cost function used to validate the control scheme in this paper is below: g = △i2o + λq △qs2 , (14) which allows for control of the load current and the minimization of the instantaneous reactive power on the input side. In eq. (14), λq is a weighting factor and △qs denotes the error between the reference and predicted value of the instantaneous reactive power in k + 1 sampling time, expressed as follows: △qs = qs∗ − (vsα isβ − vsβ isα ), (15) with vsα , vsβ , isα and isβ being the source voltages and currents in αβ coordinates, respectively. The instantaneous reactive power reference is established as qs∗ = 0, in order to have a unity power factor on the input side. Noting that g = 0 (for an arbitrary λq ) gives perfect tracking of the load current and unity power factor on the source side, then by minimizing g, the optimum value for commutation state is guaranteed. In practice, by the appropriate selection of the weighting factor λq , a given THD of the input and output currents is obtained. The principal method for selecting the weighting factors has been presented in [33]. C. Discrete Time Delay Error Compensation Several measured and calculated variables are needed, as well as the knowledge of the nine rectifier-side and the eight inverter-side valid switching states, to compute the control scheme algorithm. With these IMC rectifier and inverter side valid states there are 72 possible switching combinations that must be calculated to select the one resulting in the least error in the cost function. If the three valid rectifier-side switching states giving positive dc-link voltage are calculated before the cost function 4 10 calculation routine, then only 24 switching combinations must be computed. This results in saved computation time, but the microelectronic controller still carries a large numerical burden, causing an unwanted delay. The variables measured are vs (k), is (k), vi (k), and io (k), leaving the IMC input current and the IMC output voltage as functions of the k th selected switching state, ii (k) and vo (k) respectively, to be calculated. In order to counter the delay error due to the discrete time computation, an effective and simple method is implemented: the cost function calculation for k + 2. First, the variables in k + 1 are predicted using the already applied switching state S(k); then the variables to be controlled are predicted for k+2 using the best switching state S(k+1) to get g(k+2) to a minimum. The sample time should be sufficient to begin the data acquisition at time t(k). The variables are then computed for k + 1 using S(k), and the g(k + 2) is calculated to select the optimum S(k + 1); this is all done in the same time interval so the latter can be applied in t(k + 1). vs (k + 1) is considered equal to vs (k) due to its very small change in one sample time [4], [34]. a) vsA -10 0.4 0.41 5 b) 0.42 0.43 0.44 0.45 0.46 0.47 0.48 0.49 0.5 0.44 0.45 0.46 0.47 0.48 0.49 0.5 0.44 0.45 0.46 0.47 0.48 0.49 0.5 io i∗o 0 -5 0.4 0.41 0.42 1000 c) isA 0 0.43 qs 500 0 0.4 0.41 0.42 0.43 Time [s] Fig. 3. Simulation results of current control without instantaneous reactive power minimization. a) source voltage vsA [V/10] and current isA [A]; b) output current ia and reference i∗a [A]; c) instantaneous reactive power qs [VAR]. vsA 1 a) 0.5 0 0 IV. S IMULATION R ESULTS Two different simulations were carried out to feasibility probe the control method. Simulations with and without instantaneous reactive power minimization were done in order to evaluate the effect of introducing the instantaneous reactive power minimization in the control scheme. The simulation parameters are established according to the experimental setup available in our laboratory (they are indicated in Appendix - Table I), and the sampling period of the control algorithm was set at Ts = 20µs. The outputs of the controller are used to deliver the gate driver signals for the IGBTs. These outputs are directly set by the control algorithm and no modulator is needed. A. Simulation Results without Instantaneous Reactive Power Minimization First, the control scheme is simulated without including the term that minimizes the instantaneous reactive power on the input side of the system, so λq = 0 in eq. (14). Results show that the input current in Fig. 3(a) has a strong distortion. This is also clearly indicated in the frequency spectrum of Fig. 4(b), where it is shown that the resonance of the input filter is situated in fres = 650Hz, according to the filter parameters, and with this it is possible to observe 1.1%, 87.2% and 91.3% of the 3rd , 5th and 7th harmonics, respectively. On the other hand, the output currents follow the reference accurately as indicated in Fig. 3(b). Fig. 4(c) shows the spectrum of the load current ia . Fig. 3(c) shows the instantaneous reactive power on the input side. Due to the strong distortion of the source current, an unwanted high reactive power is present on the input side. In this case, the ac-supply vsA is clean with a sinusoidal waveform and no harmonic distortion (Fig. 4(a)). 1 b) 100 200 isA 300 400 th th 5 7 500 600 700 800 900 1000 fres 0.5 0 0 1 c) 100 200 300 200 300 400 500 600 700 800 900 1000 400 500 600 700 800 900 1000 ia 0.5 0 0 100 Frequency [Hz] Fig. 4. Simulation results of current control without instantaneous reactive power minimization. a) spectrum of source voltage [pu]; b) spectrum of source current [pu]. c) spectrum of output current [pu]. B. Simulation Results with Instantaneous Reactive Power Minimization In the second case, the control strategy is evaluated considering λq = 0.003 in eq. (14). Fig. 5(a) shows an improved input behavior, with sinusoidal current in correct phase with the input phase voltage, fulfilling the condition of unitary power factor, with a reduced harmonic distortion as indicated in Fig. 6(b). In this case, it is possible to observe 0.3%, 2.7% and 1.2% of the 3rd , 5th and 7th harmonics, respectively. On the output side, the load current presents a good tracking with respect its reference, Fig. 5(b). Fig. 5(c) shows the improvement in the instantaneous reactive input power minimization, and thus, the goal of the proposed predictive current control is clearly achieved. It must be acknowledged that the main advantage of the proposed control method is the simplicity of implementation, since the controller does not need a complex modulation unit. This can reduce the overall cost of the entire system. 5 10 a) vsA -10 0.4 0.41 5 b) isA 0 0.42 0.43 0.44 0.45 0.46 0.47 0.48 0.49 0.5 0.44 0.45 0.46 0.47 0.48 0.49 0.5 0.44 0.45 0.46 0.47 0.48 0.49 0.5 io i∗o 0 -5 0.4 0.41 0.42 0.43 1000 c) 500 0 0.4 qs 0.41 0.42 0.43 Time [s] Fig. 5. Simulation results of current control including instantaneous reactive power minimization. a) source voltage vsA [V/10] and current isA [A]; b) output current ia and reference i∗a [A]; c) instantaneous reactive power qs [VAR]. vsA 1 a) 0.5 0 0 1 b) 100 200 300 400 500 600 700 800 900 1000 isA 0.5 fres 5th 7th 0 0 1 c) a high harmonic distortion, as indicated in Fig. 8(b). There, it is evident that according to the filter parameters, the input filter resonance is situated at approximately fres = 650Hz. As mentioned before, an input filter must be added to assist the commutation of switching devices and to mitigate against line-current harmonics. However, the filter configuration which is shown in Fig. 1 presents a resonance frequency, and it can be excited by the utility due to the potential 5th and 7th harmonics in the ac-source and also by the converter itself. Due to the available ac-source in our laboratory, the input filter resonance is reflected in the source voltage as seen in Fig. 7(a) and Fig. 8(a). Finally, as reported in [35]–[37], when a distortion is present in the source voltage, the source current is not sinusoidal. For all the aforementioned reasons, it is necessary to include a term in the cost function that can help overcome this problem. A summary of the total harmonic distortion (THD) is presented in Appendix Table II. 100 200 300 200 300 400 500 600 700 800 900 1000 400 500 600 700 800 900 1000 ia 0.5 0 0 100 Frequency [Hz] Fig. 6. Simulation results of current control with instantaneous reactive power minimization. a) spectrum of source voltage [pu]; b) spectrum of source current [pu]. c) spectrum of output current [pu]. V. E XPERIMENTAL R ESULTS An IMC laboratory prototype designed and built by Universidad Técnica Federico Santa Marı́a, thanks to the support of the Power Electronics Systems Laboratory of ETH in Zurich, was used for the experimental evaluation. The converter features IGBTs of type IXRH40N120 for the bidirectional switch, standard IGBTs with anti-parallel diodes IRG4PC30UD for the inverter stage. The control scheme was implemented in a dSPACE 1103, which is connected to additional boards that include the FPGA for the commutation sequence generation and the signal conditioning for the measurement of voltages and currents. The parameters used in the experimental tests are given in Appendix - Table I. The sampling period of the control algorithm was set in Ts = 20µs. A. Experimental Results without Instantaneous Reactive Power Minimization First, the control strategy is evaluated considering λq = 0 in eq. (14). Fig. 7 shows the input current with B. Experimental Results with Instantaneous Reactive Power Minimization It is known that most industrial applications require unity power factor in the grid side. For this reason, through the instantaneous reactive power minimization, the system is forced to work with a unity power factor on the input side. Fig. 9(a) shows the measured source current and voltage of phase A, and Fig 9(b) shows the reference and measured output current of phase a. As expected, the source current fulfills the condition of unitary power factor showing an almost sinusoidal waveform and, as a consequence, the instantaneous reactive power is minimized. This is achieved by increasing the value of the weighting factor from λq = 0 to λq = 0.003 which has been empirically adjusted as explained in [33]. There, first it is established as a value equal to zero in order to prioritize the control of the output current; later it is slowly increased with the aim to obtain unity power factor in the input currents while maintaining a good behavior on the output side. In Fig. 9(b) a very good tracking of the load current ia with respect to its reference i∗a can be seen. The improvement in the quality of the source current is remarkable, because due to the mitigation of the input filter resonance, a significant reduction of distortion is apparent in Fig. 10(b) compared to Fig. 8(b). The same effect is observed in the source voltage, Fig. 10(a). As evident in Fig. 9(a), the source currents show a ripple corresponding to the resonance frequency of the input filter and the harmonic distortion of the ac-supply, as observed in the spectrum of Fig. 10(a). The THD of the source voltage and current and the output current are indicated in Appendix - Table III. C. The Problem with a Weak AC-supply In Fig. 8(a) and 10(a), the spectrum of the source voltage vsA is shown in both cases, when λq = 0, Fig. 8(a), and λq = 0.003, Fig. 10(a). 6 vsA vsA isA isA a) a) b) b) i∗a i∗a ia ia Fig. 7. Experimental results of current control without instantaneous reactive power minimization. a) source voltage vsA [V] and current isA [A]; b) output current ia [A]. 1 Fig. 9. Experimental results current control including instantaneous reactive power minimization. a) source voltage vsA [V] and current isA [A]; b) output current ia [A]. vsA 1 vsA a) 0.5 a) 0.5 fres fres 0 0 0 1 200 400 600 800 0 1000 1 isA b) 0.5 5th 7th 200 b) 0.5 fres 5th 7th 0 0 0 200 400 600 800 0 1000 1 1 400 600 800 1000 isA 200 fres 400 600 800 1000 400 600 800 1000 ia ia c) 0.5 c) 0.5 0 0 0 200 400 600 800 1000 Frequency [Hz] 0 200 Frequency [Hz] Fig. 8. Experimental results of current control without instantaneous reactive power minimization. a) spectrum of source voltage [pu]; b) spectrum of source current [pu]; c) spectrum of output current [pu]. Fig. 10. Experimental results of current control including instantaneous reactive power minimization. a) spectrum of source voltage [pu]; b) spectrum of source current [pu]; c) spectrum of output current [pu]. In the first case, the ac-source was highly distorted due to the high input current distortion and the low-order harmonics of the grid. This phenomenon occurs because a three-phase variac as the ac-supply is used. The variac behaves like a weak ac-source for the system, due to the associated inductance with the autotransformer connection. Thanks to the minimization of the instantaneous reactive power, the harmonic distortion of the source voltage is decreased from a THD of 36.48% to 14.82%. In Fig. 7(a) a distorted source current with a THD of 66.07% was observed, but when the instantaneous reactive power is minimized, a THD of 21.03% is obtained. The load current THD was 8.80% in the first case, but when the weighting factor λq is considered as λq = 0.003, an output current with a THD of 8.54% is observed. The resonance of the input filter is still a major concern that directly affects the selection of the design parameters and the modulation method. In Fig. 11, the predictive controller is enhanced by including an active damping scheme in order to mitigate the potential resonances in the input filter. The method is based on a virtual resistor that damps the Lf Cf resonance, improving the performance of the system as indicated in [38]–[40]. By considering this method, the source voltage and current THD are 13.67% and 22.81%, respectively, with a THD of 7.49% in the load current. VI. C ONCLUSION A current control with instantaneous reactive power minimization for an indirect matrix converter has been presented in this paper. The control scheme uses the predicted values of the input and output currents to evaluate the best-suited converter state considering the output current error and the input power factor. Our experimental results indicate that the presented strategy provides good tracking of the output current to its reference and at the same time minimizes the instantaneous reactive power on the input side. In addition, the strategy presented in this paper produces a drastic reduction in the input current harmonics generated by the resonance of the input filter, which is usually a major problem in matrix converters. The method also presents drawbacks, as the cost function is explicitly solved for each switching state. This can be a problem 7 R EFERENCES vsA isA a) b) i∗a ia Fig. 11. Experimental results with active damping implementation. a) source voltage vsA [V] and current isA [A]; b) output current ia [A]. if a slow controller is used, as a higher sampling time could increase the harmonic distortion in the currents. The ac-supply and the filter resonance have an important influence on the behavior of the source current and better results can be expected by optimizing the input filter, by adding active damping but also with a clean ac-supply. A PPENDIX The parameters of the simulation and experimental setup are indicated in Table I and the THD information is detailed in Table II and Table III. TABLE I E XPERIMENTAL SETUP PARAMETERS Variables Ts Vs fs Lf Cf Rf RL LL fo λq Description Sampling time Supply phase voltage Supply frequency Input filter inductance Input filter capacitance Input filter resistance Load resistance Load inductance Output frequency Weighting factor Value 20 [µs] 90 [V] 50 [Hz] 5.9 [mH] 10 [µF] 0.5 [Ω] 10 [Ω] 15 [mH] 50 [Hz] 0; 0.003 TABLE II E XPERIMENTAL THD RESULTS WITH λq = 0 Harmonic THD 3th 5th 7th vsA 36.48% 2.22% 3.11% 2.82% isA 66.07% 12.25% 6.40% 8.55% ia 8.80% 0.20% 0.23% 0.31% TABLE III E XPERIMENTAL THD RESULTS WITH λq = 0.003 Harmonic THD 3th 5th 7th vsA 14.82% 1.57% 4.90% 2.21% isA 21.03% 10.68% 2.25% 5.21% ia 8.54% 0.97% 1.41% 1.15% [1] P. Wheeler, J. Rodriguez, J. Clare, L. Empringham, and A. Weinstein, “Matrix converters: a technology review,” Industrial Electronics, IEEE Transactions on, 2002. [2] T. Wijekoon, C. Klumpner, P. Zanchetta, and P. Wheeler, “Implementation of a hybrid ac-ac direct power converter with unity voltage transfer,” Power Electronics, IEEE Transactions on, 2008. [3] J. Kolar, T. Friedli, F. Krismer, and S. Round, “The essence of three-phase ac-ac converter systems,” Power Electronics and Motion Control Conference (EPE-PEMC), Poznan, Poland, 2008. [4] P. Correa, J. Rodriguez, M. Rivera, J. Espinoza, and J. Kolar, “Predictive control of an indirect matrix converter,” Industrial Electronics, IEEE Transactions on, 2009. [5] P. Zanchetta, P. Wheeler, J. Clare, M. Bland, L. Empringham, and D. Katsis, “Control design of a three-phase matrix-converter-based ac-ac mobile utility power supply,” Industrial Electronics, IEEE Transactions on, 2008. [6] S. Lopez Arevalo, P. Zanchetta, P. Wheeler, A. Trentin, and L. Empringham, “Control and implementation of a matrixconverter-based ac ground power-supply unit for aircraft servicing,” Industrial Electronics, IEEE Transactions on, 2010. [7] E. Yamamoto, T. Kume, H. Hara, T. Uchino, J. Kang, and H. Krug, “Development of matrix converter ans its applications in industry,” Annual Conference of the IEEE Industrial Electronics Society (IECON), Porto, Portugal, 2009. [8] J. Rodriguez, M. Rivera, J. Kolar, and P. Wheeler, “A review of control and modulation methods for matrix converters,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 58 –70, jan. 2012. [9] X. Lu, K. Sun, G. Li, and L. Huang, “Analysis and control of input power factor in indirect matrix converter,” Annual Conference of the IEEE Industrial Electronics Society (IECON), Porto, Portugal, 2009. [10] S. Ahmed, A. Iqbal, H. Abu-Rub, J. Rodriguez, C. Rojas, and M. Saleh, “Simple carrier-based pwm technique for a three-tonine-phase direct ac-ac converter,” Industrial Electronics, IEEE Transactions on, vol. 58, no. 11, pp. 5014 –5023, nov. 2011. [11] P. Kiatsookkanatorn and S. Sangwongwanich, “A unified pwm method for matrix converters and its carrier-based realization using dipolar modulation technique,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 80 –92, jan. 2012. [12] Z. Yan, M. Jia, C. Zhang, and W. Wu, “An integration spwm strategy for high-frequency link matrix converter with adaptive commutation in one step based on de-re-coupling idea,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 116 –128, jan. 2012. [13] M. Jussila and H. Tuusa, “Comparison of simple control strategies of space-vector modulated indirect matrix converter under distorted supply voltage,” Power Electronics, IEEE Transactions on, 2007. [14] R. Pena, R. Cardenas, E. Reyes, J. Clare, and P. Wheeler, “A topology for multiple generation system with doubly fed induction machines and indirect matrix converter,” Industrial Electronics, IEEE Transactions on, 2009. [15] M. Y. Lee, P. Wheeler, and C. Klumpner, “Space-vector modulated multilevel matrix converter,” Industrial Electronics, IEEE Transactions on, 2010. [16] R. Cardenas-Dobson, R. Pena, P. Wheeler, and J. Clare, “Experimental validation of a space vector modulation algorithm for fourleg matrix converters,” Industrial Electronics, IEEE Transactions on, vol. PP, no. 99, pp. 1 –1, 2010. [17] T. Friedli and J. Kolar, “Comprehensive comparison of threephase ac-ac matrix converter and voltage dc-link back-to-back converter systems,” International Power Electronics Conference (IPEC), Sapporo, Japan, 2010. [18] J. Kolar, F. Schafmeister, S. Round, and H. Ertl, “Novel threephase ac-ac sparse matrix converters,” Power Electronics, IEEE Transactions on, 2007. [19] X. Wang, H. Lin, H. She, and B. Feng, “A research on space vector modulation strategy for matrix converter under abnormal inputvoltage conditions,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 93 –104, jan. 2012. [20] X. Lie, J. Clare, P. Wheeler, L. Empringham, and L. Yongdong, “Capacitor clamped multilevel matrix converter space vector modulation,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 105 –115, jan. 2012. 8 [21] H. She, H. Lin, B. He, X. Wang, L. Yue, and X. An, “Implementation of voltage-based commutation in space-vector-modulated matrix converter,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 154 –166, jan. 2012. [22] S. Mikkili and A. Panda, “Instantaneous active and reactive power and current strategies for current harmonics cancellation in 3-ph 4wire shaf with both pi and fuzzy controllers,” Energy and Power Engineering, 2011. [23] S. Kouro, P. Cortes, R. Vargas, U. Ammann, and J. Rodriguez, “Model predictive control, a simple and powerful method to control power converters,” Industrial Electronics, IEEE Transactions on, 2009. [24] P. Correa, J. Rodriguez, I. Lizama, and D. Andler, “A predictive control scheme for current-source rectifiers,” Industrial Electronics, IEEE Transactions on, 2009. [25] P. Cortes, G. Ortiz, J. Yuz, J. Rodriguez, S. Vazquez, and L. Franquelo, “Model predictive control of an inverter with output lc filter for ups applications,” Industrial Electronics, IEEE Transactions on, 2009. [26] H. Miranda, P. Cortes, J. Yuz, and J. Rodriguez, “Predictive torque control of induction machines based on state-space models,” Industrial Electronics, IEEE Transactions on, 2009. [27] M. Preindl, E. Schaltz, and P. Thφgersen, “Switching frequency reduction using model predictive direct current control for high power voltage source inverters,” Industrial Electronics, IEEE Transactions on, vol. PP, no. 99, pp. 1 –1, 2010. [28] J. Rodriguez, J. Kolar, J. Espinoza, M. Rivera, and C. Rojas, “Predictive torque and flux control of an induction machine fed by an indirect matrix converter with reactive power minimization,” International Symposium on Industrial Electronics (ISIE), Bari, Italy, 2010. [29] M. Rivera, J. Rodriguez, P. Wheeler, C. Rojas, A. Wilson, and J. Espinoza, “Control of a matrix converter with imposed sinusoidal source currents,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 4, pp. 1939 –1949, april 2012. [30] S. Muller, U. Ammann, and S. Rees, “New time-discrete modulation scheme for matrix converters,” Industrial Electronics, IEEE Transactions on, 2005. [31] R. Vargas, J. Rodriguez, U. Ammann, and P. Wheeler, “Predictive current control of an induction machine fed by a matrix converter with reactive power control,” Industrial Electronics, IEEE Transactions on, 2008. [32] J. Rodriguez, J. Kolar, J. Espinoza, M. Rivera, and C. Rojas, “Predictive current control with reactive power minimization in an indirect matrix converter,” International Conference on Industrial Technology (ICIT), Viña del Mar, Chile, 2010. [33] P. Cortes, S. Kouro, B. La Rocca, R. Vargas, J. Rodriguez, J. Leon, S. Vazquez, and L. Franquelo, “Guidelines for weighting factors design in model predictive control of power converters and drives,” International Conference on Industrial Technology (ICIT), Gippsland, Australia, 2009. [34] P. Cortes, J. Rodriguez, C. Silva, and A. Flores, “Delay compensation in model predictive current control of a three-phase inverter,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 2, pp. 1323 –1325, feb. 2012. [35] D. Casadei, G. Serra, and A. Tani, “A general approach for the analysis of the input power quality in matrix converters,” Power Electronics, IEEE Transactions on, vol. 13, no. 5, pp. 882 –891, 1998. [36] F. Blaabjerg, D. Casadei, C. Klumpner, and M. Matteini, “Comparison of two current modulation strategies for matrix converters under unbalanced input voltage conditions,” Industrial Electronics, IEEE Transactions on, vol. 49, no. 2, pp. 289 –296, 2002. [37] A. Timbus, P. Rodriguez, R. Teodorescu, M. Liserre, and F. Blaabjerg, “Control strategies for distributed power generation systems operating on faulty grid,” International Symposium on Industrial Electronics (ISIE), Montreal, Canada, 2006. [38] M. Rivera, P. Correa, J. Rodriguez, I. Lizama, and J. Espinoza, “Predictive control of the indirect matrix converter with active damping,” International Power Electronics and Motion Control Conference (IPEMC), Wuhan, China, 2009. [39] M. Rivera, C. Rojas, J. Rodriguez, P. Wheeler, B. Wu, and J. Espinoza, “Predictive current control with input filter resonance mitigation for a direct matrix converter,” Power Electronics, IEEE Transactions on, vol. 26, no. 10, pp. 2794 –2803, 2011. [40] M. Rivera, J. Rodriguez, B. Wu, J. Espinoza, and C. Rojas, “Current control for an indirect matrix converter with filter resonance mitigation,” Industrial Electronics, IEEE Transactions on, vol. 59, no. 1, pp. 71 –79, 2012. Marco Rivera (S’09 M’10) received his B.Sc. in Electronics Engineering and M.Sc. in Electrical Engineering from the Universidad de Concepción, Chile in 2007 and 2008, respectively. In 2011, he received his PhD degree at the Department of Electronics Engineering, Universidad Técnica Federico Santa Marı́a, in Valparaı́so, Chile. His research interests include direct and indirect matrix converters, predictive and digital controls for high-power drives, four-leg converters and development of high performance control platforms based on Field-Programmable Gate Arrays. Dr. Rivera was awarded a scholarship from the Marie Curie Host Fellowships for Early Stage Research Training in Electrical Energy Conversion and Conditioning Technology at University College Cork, Ireland in 2008. During January and February of 2010 he was a visiting PhD student of the Electrical and Computer Engineering Department at Ryerson University, Canada, where he worked on predictive control applied on four-leg inverters. He was also a visiting PhD student at the Departamento de Ingenierı́a Eléctrica y Computacional of ITESM, Monterrey, Mexico, where he worked on experimental aspects of a Double Fed Induction Generator Indirect Matrix Converter System. Between September and November of 2011 he was a visiting researcher in the Laboratoire PLAsma et Conversion d’Energie (LAPLACE) at the Université de Toulouse in France. Currently he is working in a Post Doctoral position at Universidad Técnica Federico Santa Marı́a, Chile. Jose Rodriguez (M’81-SM’94-F’10) Received the Engineer degree in electrical engineering from the Universidad Técnica Federico Santa Marı́a (UTFSM), Valparaı́so, Chile, in 1977 and the Dr.-Ing. degree in electrical engineering from the University of Erlangen, Erlangen, Germany, in 1985. He has been with the Department of Electronics Engineering, Universidad Técnica Federico Santa Marı́a since 1977, where he is currently full Professor and Rector. He has co-authored more than 300 journal and conference papers. His main research interests include multilevel inverters, new converter topologies, control of power converters, and adjustable-speed drives. Prof. Rodriguez is Associate Editor of the IEEE T RANSACTIONS ON P OWER E LECTRONICS and IEEE T RANSACTIONS ON I NDUSTRY E LECTRONICS since 2002. He received the Best Paper Award from the IEEE T RANSACTIONS ON I NDUSTRY E LECTRONICS in 2007, the Best Paper Award from the IEEE I NDUSTRIAL E LECTRONICS M AGAZINE in 2008 and Best Paper Award from the IEEE T RANSACTIONS ON P OWER E LECTRONICS in 2010. Dr. Rodrguez is member of the Chilean Academy of Engineering and Fellow of the IEEE 9 Jose R. Espinoza (S’92-M’97) received the Eng. degree in electronic engineering and the M.Sc. degree in electrical engineering from the University of Concepción, Concepción, Chile, in 1989 and 1992, respectively, and the Ph.D. degree in electrical engineering from Concordia University, Montreal, QC, Canada, in 1997. Since 2006, he has been a Professor in the Department of Electrical Engineering, Universidad de Concepción, where he is engaged in teaching and research in the areas of automatic control and power electronics. He has authored and coauthored more than 100 refereed journal and conference papers. Prof. Espinoza is currently an Associate Editor of the IEEE T RANS ACTIONS ON I NDUSTRY E LECTRONICS and IEEE T RANSACTIONS ON P OWER E LECTRONICS . Haitham Abu-Rub (M99SM07) received the M.Sc. degree in electrical engineering from the Gdynia Maritime University, Poland, in 1990 and the Ph.D. degree from Gdansk University of Technology, Poland, in 1995, in which he was later on hired as assistant professor. For eight years, he has been hired as an Assistant Professor and as an Associate Professor at Birzeit University, Palestine. For four years, he has been appointed the Chairman of Electrical Engineering Department at the same university for four years. He is currently an Associate Professor with Texas A&M University at Qatar. His main research interests include electric drives and power electronics. Dr. Abu-Rub is the recipient of many prestigious international awards, such as the American Fulbright Scholarship (at Texas A&M University), the German Alexander von Humboldt Fellowship (at the University of Wuppertal), the German DAAD Scholarship (at Bochum University), the British Royal Society Scholarship (at Southampton University), and others. Dr. Abu-Rub has published/accepted more than one hundred and forty journal and conference papers.