Particle Swarm Algorithm-Based Self
advertisement

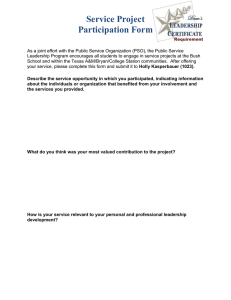
The Online Journal on Electronics and Electrical Engineering (OJEEE) Vol. (3) – No. (1) Particle Swarm Algorithm-Based Self-Excited Induction Generator Steady State Analysis Ahmed. E. Kalas*, Medhat. H. Elfar*, Soliman. M. Sharaf ** *Electrical Engineering Dept., Faculty of Engineering, Port-Said, Suez Canal University, Egypt **Electrical Engineering Dept., Faculty of Engineering, Helwan University, Egypt Abstract-In this paper, Novel method, Particle Swarm Optimization (PSO) algorithm, based technique is proposed to estimate and analyze the steady state performance of self-excited induction generator (SEIG). The steady state analysis of SEIG is formulated as a multidimensional optimization problem. In this novel method the tedious job of deriving the complex coefficients of a polynomial equation and solving it, as in previous methods, is not required. The steady state open loop behavior of SEIG driven by a regulated prime mover is formulated in a simple and straightforward way without mathematical manipulation. By comparing the simulation results obtained by the proposed method with those obtained by the conventional methods, a good agreement between these results is obtained. The comparison validates the effectiveness of this proposed technique. Key Words- SEIG, PSO, steady state analysis I. INTRODUCTION The self-excited induction generators (SEIG) have been found suitable for energy conversion for remote locations. Self-excited induction generators (SEIG) are frequently considered as the most economical solution for powering costumers isolated from the utility grid. SEIG has many advantages such as simple construction, absence of DC power supply for excitation, reduced maintenance cost, good over speed capability, and self short-circuit protection capability. Unlike induction generators connected to the power utility grid, both frequency and voltage are not fixed but depend on many factors, such as generator parameters, excitation capacitor, speed, and load. This makes the SEIG steady state analysis is more difficult. Major drawbacks of SEIG are reactive power consumption, its relatively poor voltage and frequency regulation under varying prime mover speed, excitation capacitor and load characteristics [1], [2]. Over the past 25 years, many researchers have analyzed the steady state performance of the three-phase SEIG on the basis of its approximate equivalent circuit. Two different solution methods have been used to determine the steady-state analysis of the three-phase SEIG driven by constant-speed prime mover. The loop impedance approach is the first method [3]-[9]. Using loop impedance approach, for a given load and speed, two simultaneous nonlinear equation are derived in terms of frequency ( F ) and magnetizing reactance ( X m ) of the generator by separating the real and imaginary parts of the loop impedance of the equivalent circuit. The equations are then solved for F and X m . Usually, the Newton-Raphson method is used to solve the simultaneous nonlinear equations, which requires much mathematical effort to derive the elements of the Jacobean matrix. The second method is the nodal admittance approach [10]-[14], in this Reference Number: W10-0070 method the equivalent admittance of the circuit at the air gap point is separated into real and imaginary parts. The real part of the admittance is independent of X m and usually expressed by a high order polynomial of F [12]. However, the imaginary part of the admittance is a nonlinear function of both F and X m . This method requires the combined admittance of the load, capacitive reactance and stator leakage reactance to be evaluated, which will result in lengthy algebraic manipulations. For complex R-L loads, the degree of the polynomial is seven. Both methods have a common disadvantage that detailed algebraic derivations for the coefficients of the equations are required. In addition, the earlier approaches are not flexible as the coefficients are valid only for a given circuit configuration. Inclusion of core loss resistance or load inductance will increase the order of the equations. Chan [10] simplified the algebraic derivations in the nodal admittance approach by introducing an iterative technique to find the value of F from real part of admittance. Chan [14] employed a symbolic programming technique to reduce the manual derivations of the equations. However these techniques still require some degree of manual manipulation of the mathematical equations before these techniques are applied. Recently, many researchers have proposed different techniques to tackle these problems based on user-friendly computer software that have been developed for numericalbased solution of a set of nonlinear equations[15-19]. Different from conventional optimization method, particle swarm optimization (PSO), introduced by Kennedy and Eberhart in 1995 [20-22], uses a simple mechanism that mimics swarm behaviour in birds flocking and fish schooling to guide the particles to search for globally optimal solutions. This paper proposes a novel method for evaluating the SEIG steady state characteristics using PSO algorithm that does not require the detailed derivation of nonlinear equations. II. STEADY STATE MODELING OF SEIG Most of the steady state models of SEIG developed by different researchers are based on per phase equivalent circuit. These models use the following two basic methods; i) Loop impedance method and ii) Nodal admittance method. The steady state model based on nodal admittance method is presented here. In the analysis that follows, the following assumptions are made: - The core loss in the machine is neglected. 369 The Online Journal on Electronics and Electrical Engineering (OJEEE) - All the machine parameters in the equivalent circuit are assumed to be constant except the magnetizing reactance which is assumed to be affected by the magnetic saturation. The per-phase equivalent circuit of a three-phase SEIG with a R-L load and excitation capacitor is shown in Fig. 1, where R1 , X 1 , R2 , X 2 and X m represent the stator resistance, stator leakage reactance, rotor resistance, rotor leakage reactance, and magnetizing reactance respectively, RL , X L , and X c represent the load resistance, load reactance, and excitation capacitor reactance, respectively and F and v represent the per unit(p.u.) frequency and speed, respectively. The reactances are specified at a base or rated frequency. The circuit is normalized to the p.u. frequency by dividing all parameters and voltages by the p.u. frequency F . Using nodal analysis, the circuit can be represented by three parallel admittances Y1 , Ym and Yr , where Y1 (Yc YL )Ys Yc YL Ys Yc Ys 2 jF Xc 1 R1 / F jX1 Ym YL 1 jX m Yr 1 RL / F jX L 1 ( R2 / F v) jX 2 optimization technique has been successfully used in many research area such as function optimization, fuzzy system control, ANN training etc and has become a new and hot spot of research in the world. The following is a brief introduction to the operation of the PSO algorithm. Consider a swarm of particles. Each particle represents a potential solution and has a position in the problem space represented by a position vector xi. A swarm of particles moves through the problem space with the moving velocity of each particle represented by a velocity vector vi. At each time step, a fitness function f representing a quality measure is calculated by using xi as input. Each particle keeps track of its individual best position, xpbest, which is associated with the best fitness it has achieved so far. Furthermore, the best position among all the particles obtained so far in the swarm is kept track of as xgbest. This information is shared by all particles. The PSO algorithm is implemented in the following iterative procedure to search for the optimal solution. (i) (ii) (iii) (iv) The nodal equation for node “a” is found to be E1 (Y1 Ym Yr ) 0 (1) Under normal operating condition, the self-excitation, E1 0 . Thus (2) (Y1 Ym Yr ) 0 R1 F IL VL F RL F jX jX F L jX 1 jX a 2 jX E F m (v) Initialize a population of particles with random positions and velocities of N dimensions in the problem space. Define a fitness measure function to evaluate the performance of each particle. Compare each particle’s present position xi with its xpbest based on the fitness evaluation. If the current position xi is better than xpbest, then set xpbest = xi. If xpbest is updated, then compare each particle’s xpbest with the swarm best position xgbest based on the fitness evaluation. If xpbest is better than xgbest, then set xgbest = xpbest. At iteration k, a new velocity for each particle is updated by vi(k+1)=wvi(k)+c1r1(xpbest(k)-xi(k))+c2r2(xgbest(k)-xi(k)) (3) (vi) For each particle, change its position according to the following equation. 2 I2 I1 c Vol. (3) – No. (1) R2 F v xi(k+1) = xi(k) + vi(k+1) (4) (vii) Repeat steps (iii)-(vi) until a criterion, usually a sufficiently good fitness or a maximum number of Yc Ym YL Yr iterations is achieved. The final value of xgbest is Figure (1): Per-phase equivalent circuit of a three-phase SEIG. regarded as the optimal solution of the problem. III. OVERVIEW OF PSO Particle swarm optimization technique was first proposed by Kennedy and Eberhart in 1995 [20]. PSO is motivated from the simulation of the behavior of social systems such as fish schooling and birds flocking. The PSO has been found to be fast in solving nonlinear, non-differentiable, multimodal optimization problems. Comparing with genetic algorithm, PSO’s advantages lie on its easy implementation and few parameters to adjust, also the PSO algorithm requires less computation time and less memory. Particle swarm Reference Number: W10-0070 In (3), c1 and c2 are positive constants representing the weighting of the acceleration terms that guide each particle toward the individual best and the swarm best positions xpbest and xgbest, respectively, r1 and r2 are uniformly distributed random numbers in [0, 1]; w is a positive inertia weight developed to provide better control between exploration and exploitation; N is the number of particles in the swarm. The velocity vi is limited to the range [-vmax, vmax]. If the velocity violates this limit, it is set to the relevant upper or low-bound value. 370 The Online Journal on Electronics and Electrical Engineering (OJEEE) Constant speed operation If the induction generator is driven by constant speed prime mover to supply constant load impedance Z L with fixed value of X c , the equation(2) is solved to find the values of unknown values F and X m . Once the values of F and X m are known, the performance of the generator (voltage, current, and power at various points of the circuit) can easily be determined. In most of the previous methods of analysis, the determination of F and X m is tedious and timeconsuming task. In this study, equation(2) is solved as optimization problem by using PSO technique. The value of total admittance is considered as fitness function and the problem space is two dimension. The various characterisitic of the geneerator can be obtained from its equivalent circuit but that requires to run PSO for different possible values of a particular parameter. The no-load charactersitics is the variation of no-load voltage against the excitation capacior C for a constant speed v , this characteristic can easily be generated from run PSO for various values of X c at noload( Z L ). Knowing F and X m is the first step to get these characteristic, hence we will focus on the comparison between the values calculated using PSO and those calculated by the previous methods. The machine parameters used are indicated in appendix I [19]. The results found for excitation capacitor varies from 22 to 44 microfarad at constant speed of 1500 r.p.m are shown in Fig. 2. The solid line represents PSO results and dashed line represnets the previous methods results, the figure indicates that PSO results are very close to the corresponding previous methods values. Fig. 2(a) shows the variations of magnetizing reactance against the excitation Reference Number: W10-0070 140 130 Magnetizing reactance,Xm 120 110 100 90 80 70 60 20 25 30 35 Excitation capacitor,micro-F 40 45 40 45 (a) 50 49.95 49.9 Frequency,F To ensure the phenomenon of self-excitation, equation (2) must be satisfied. By investigating equation(2), the all parameters of induction generator, except the magnetizing reactance, are considered as constant. The magnetizing reactance X m is assumed to be a variable and depends on magnetic saturation. The other parameters as X c , F , v and Z L are considered as adjustable parameters in the circuit, thus equation (2) is nonlinear equation having five variables ( X m , X c , F , v , Z L ). However, based on the generator operation condition (Constant speed-constant frequencyvariable speed), some of these variable parameters can be considered as fixed parameters. To determine the unknown variables, the previous methods separate the complex equation(2) to two nonlinear scalar equations and these two equations are rearranged to be expressed in unknown terms, this requires step-by-step algebraic manipulations to do this task. The procedure of obtaining the unknown parameters for constant speed operation by using PSO is described in the next section. capacitor. The variations of the frequency against excitation capacitor is shown in Fig. 2(b). Moreover, the no-load terminale voltage of the generator for various values of excitation capacitor is shown in Fig. 2(c). The percentage errors of X m , F and VL calculated using PSO and the previous methods is shown in Fig. 3, the error introduced by using the PSO with respect to the previous methods reaches up 4% which is acceptable value. 49.85 49.8 49.75 49.7 20 25 30 35 Excitation capacitor,micro-F (b) 260 240 220 No-load terminal voltage,V IV. PROBLEM FORMULATION Vol. (3) – No. (1) 200 180 160 140 120 100 80 60 20 25 30 35 Excitation capacitor,micro-F 40 45 (c) Figure (2): 2 No-load characteristics of IG. (-.) PSO results; (--) previous methods results 371 The Online Journal on Electronics and Electrical Engineering (OJEEE) 5 Vol. (3) – No. (1) 50 4 49.5 3 49 Frequency,F 2 Error-% 1 0 48.5 48 -1 47.5 -2 47 -3 -4 46.5 -5 20 25 30 35 Excitation capacitor,micro-F 40 0 200 400 45 600 Load power-W 800 1000 1200 (b) 120 Figure (3): The relative error (--)Voltage; (-.)Frequency; (-*) Magnetizing reactance 115 magnetizing reactance,Xm 110 The load characteristic is the variation of terminal voltage against the generator output power and such a characteristic can again generated from applying PSO for various values of Z L . In this case, X c and v are considered as fixed parameters. Fig. 4 shows the comprison of PSO and previous methods results for excitation capacitor (40μF) and speed of 1pu. The figure indicates that PSO results are very close to the corresponding previous methods values. Fig. 4(a) shows the variations of the terminal voltage versus the load power, it can be observed from this figure that this characteristic is divided to two regions, the stable region and unstable region. As Z L is decreased the load power increases while the load voltage decreases, until the load power reaches its maximum value that region represents the stable region. If Z L is decreased more, both load power and load voltage decrease that represents the unstable region. The variations of the frequency against the load power is shown in Fig. 4(b), where the magnetizing reactance variation versus the load power is shown in Fig. 4(c). 105 100 95 90 85 80 75 0 200 400 600 Load power 800 1000 1200 (c) Figure (4): The load characteristics of IG. (-.) PSO results; (--) previous methods results It can be observed from Fig. 5 that the maximum errors of X m and F and VL are within the tolerance level(±5%). 5 4 260 3 2 240 Error-% Terminal voltage,Vt 1 220 0 -1 200 -2 180 -3 -4 160 -5 140 0 200 400 600 Load power-W (a) Reference Number: W10-0070 800 1000 1200 0 100 200 300 400 500 600 Load power 700 800 900 1000 1100 Figure (5): The relative error. (--)Voltage; (-.)Frequency; (-*) Magnetizing reactance 372 The Online Journal on Electronics and Electrical Engineering (OJEEE) V. CONCLUSION In this paper, novel method (PSO) is proposed to evaluate the performance characteristics of a SEIG as optimization problem, instead of step by step analytical derivation of several equations as in the previous methods. PSO, a modern and efficient optimization technique, is used to obtain the steady state characteristics of SEIG. The PSO simulation results are compared with the previous methods results, closeness between the results prove the validity of PSO technique. The maximum relative error between PSO and previous method is 4% for no-load characteristics and 2% for the load characteristics that is acceptable relative error. [9] [10] [11] Appendix I [12] Induction machine data [19] 3-phase, 4-pole, 50Hz,delta connected, squirrel cage induction motor, 1.5-kW, 220V, the parameters: R1 5.033 , X 1 5.605 , R2 4.667 , and X 2 5.605 . Air gap voltage: the variation of air gap voltage with magnetizing reactance at rated frequency for the induction machine is as given: [13] [14] E 596.03 12.035 X m 0.1374 X m2 5.636 10 4 X m3 F [15] REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] M. G. Simoes and F. A. Farret, Renewable Energy Systems-Design and Analysis with Induction Generators. Raton, FL: CRC Press, 2004. Farret and M. G. Simoes, Integration of Alternative Sources of Energy. Piscataway, NJ: IEEE Press, 2006. S. S. Murthy, O. P. Malik, and A. K. Tandor, “Analysis of Self-Excited Induction Generators,” Proc. Inst. Electr. Eng., 1982, Vol. 129, No. 6, pp. 260–265. L. Shridhar, B. Shing, and C. S. Jha, “A Step Towards Improvements in The Characteristics of Self-Excited Induction Generator,” IEEE Trans. Energy Conversion, Mar 1993, Vol. 8, No. 1, pp. 40–46. S. P. Singh, B. Singh, and M. P. Jain, “Performance Characteristics and Optimal Utilization of A Cage Machine as Capacitor Excited Induction Generator,” IEEE Trans. Energy Conversion, Dec.1990, Vol. 5, No. 4, pp. 679–685. S. P. Singh, B. Singh, and M. P. Jain, “Steady State Analysis of Self-Excited Pole Changing Induction Generator,” J. Inst. Eng., Aug. 1992, Vol. 73, pp.137– 144. S. P. Singh, B. P. Singh, and M. P. Jain, “Comparative Study on The Performance of A Commercially Designed Induction Generator With Inductor Motors Operating as Self Excited Induction Generators,” Proc. Inst. Electr. Eng., 1993, Vol. 140, No. 5, pp. 374–380. S. S. Murthy,B. P. Singh, C. Nagamani, and K.V.V. Satyanarayana, “Studies on The Use of Conventional Reference Number: W10-0070 [16] [17] [18] [19] [20] [21] [22] Vol. (3) – No. (1) Induction Motors as Self-Excited Induction Generators,” IEEE Trans. Energy Conversion, Dec.1988, Vol. 3, No. 4, pp. 842–848. K. Al Jabri and A. I. Alolah, “Limits on The Performance of The Three-Phase Self-Excited Induction Generators,” IEEE Trans. Energy Conversion”June 1990, Vol. 5, No. 2, pp. 350–356, Jun. 1990. T. F. Chan, “Self-Excited Induction Generators Driven by Regulated and Unregulated Turbines,” IEEE Trans. Energy Conversion, Jun. 1996, Vol. 11, No. 2, pp. 338– 342. T. F. Chan, “Analysis of Self-Excited Induction Generators Using An Iterative Method,” IEEE Trans. Energy Conversion, Sep.1995, Vol. 10, No. 3, pp. 502– 507. L. Quazene and G. McPherson, “Analysis of the isolated induction generator,” IEEE Trans. Power App. Syst., Aug. 1983, Vol. PAS-102, No. 8, pp.2793–2798. S. L. Alghuwainem, “Performance Analysis of A PV Powered DC Motor Driving A 3-Phase Self-Excited Induction Generator,” IEEE Trans. Energy conversion, Mar. 1996, Vol. 11, No.1, pp155-161. T.F Chan, “Steady State Analysis of Self Excited Induction Generator, ” IEEE Transactions on energy conversion, June 1994, Vol.9, No.2, pp.288-296. L. Alolh and M. A. Alkanhal, ‘Optimization-Based Steady State Analysis of Three Phase Self-Excited Induction Generator’, IEEE Trans. Energy Conversion, 2000, Vol. 15, No. 1, 61–65. Y.N. Anagreh, “Teaching The Self Excited Induction Generator Using MATLAB,” International Journal of Electrical Engineering Education, 2003, 40(1). 55-65. K. A. Nigim, M. M. Salama, M. Kazerani, “Solving Polynomial Algebraic Equations of the Stand Alone Induction Generator. International Journal of Electrical Engineering Education, 40(1), 45-54, 2003. K. Gurung, P. Freere, ” Matlab Symbolic Computation for The Steady State Modeling of Symmetrically Loaded-Self Excited Induction Generator,” Kathmandu University Journal of Science, Engineering and Technology, Jan.2007, Vol.I, No.III. M. H. Haque,” A Novel Method of Evaluating Performance Characteristics of A Self-Excited Induction Generator”, IEEE Trans. Energy Conversion, June2009, Vol. 24, No. 2,pp, 358-365. J. Kennedy and R. Eberhart. “Particle Swarm Optimization”, Proceedings of the IEEE International Conference on Neural Networks. IEEE Service Center, Piscataway, NJ, IV: 1995, pp.1941-1948. J. Kennedy, R. Eberhart, and Y. Shi, “Swarm Intelligence”, San Francisco: Morgan Kaufmann Publishers, 2001. R. C. Eberhart and J. Kennedy, “A New Optimizer Using Particle Swarm Theory,” Proc. 6th Int. Symp. Micromachine Human Sci., Nagoya, Japan, 1995, pp. 39–43. 373