guidelines for authors
advertisement

SIMULATION ANALYSIS ON FACTORS AFFECTING THE ACCURACY OF AN
THREE-AXIS INERTIAL STABILIZED PLATFORM FOR AIRBORNE REMOTE
SENSING SYSTEMS
Ruyi Zhu, Yanshun Zhang, Jiancheng Fang
School of Instrumentation Science & Opto-electronics Engineering , Beijing University of
Aeronautics & Astronautics, Beijing, China 100191
Email: buleapple085@163.com
KEY WORDS: Airborne Remote Sensing, Stabilized Platform, Accuracy, Disturbance,
Modeling
ABSTRACT: Inertial stabilized platforms are key components of airborne remote sensing
systems, which can support and stabilize image payloads, isolate disturbances of moving
vehicles, provide stabilized level position norm to payloads, and markedly improve the quality
of remote sensing images. The stabilized accuracy directly affects the definition and resolution
of remote sensing images. So increasing platform accuracy is very significant in the design and
development of inertial stabilized platforms, and the factors affecting platform accuracy must be
discussed and researched. Simulation analysis on the factors was done based on inertial
stabilized platform system model in this paper. First of all, the system model of an inertial
stabilized platform was simply introduced, which is quite dissimilar to that of an inertial
navigation platform. Secondly, to analyze the factors which affect stabilized platform accuracy,
its simulation system was set up according to the system model. In order to expediently discuss
and analyze the factors, a classical control scheme based on PID algorithm was designed.
Besides, the control system adopted an inner rate or stabilization loop inside an outer position or
track loop. Finally, simulation experiment was performed. The affection factors which were
torque disturbances (imbalance, friction and kinematic coupling), erroneous torque equivalent
inputs (gyro drift and gyro misalignment) were researched, and all values were estimated
considering the actual conditions. So the simulation results are reliable, which can mostly reflect
the performance and error characteristics of actual platform, providing theoretical guidance and
technical support for platform development, and reference for research on other type platforms
as well.
1.
INTRODUCTION
The non-ideal motion of a vehicle can lead to the degradation of image quality, and it is difficult
to obtain high-resolution and high-precision remote sensing images. An approach is proposed to
inhibit image quality degradation, which employs an inertial stabilized platform to isolate the
impact of vehicle angular motion, vibration and other factors on image payloads, and
significantly improve the image quality[1-4].
The major function of an inertial stabilized platform is twofold: it eliminates disturbances
transmitted to the platform, and tracks local geographic coordinate system under the condition
that POS (position and orientation system) provides the position, speed and attitude (PSA)
information of image payloads. The error of commanded PSA and the PSA provided by POS is
line-of-sight error (LSE). The track loop is designed to maintain LSE near zero. A stabilization
loop is included in the track loop, and its architecture involves a compensator, a motor, a gear, a
rate gyro mounted on the platform gimbal. The LSE is converted into the desired angular rate,
which subtracts the rate measured by the gyro to form the rate error (RE). The stabilization loop
generates motor control torque, which is proportional to RE, to drive the platform gimbal.
Platform stabilized accuracy directly affects the definition and resolution of sensing images.
There are several factors that can have different influence on platform performance, such as the
effective torque due to platform mass imbalance, friction, kinematic coupling, gyro drift, gyro
misalignment and so on[2,5]. The dynamic response is quite sensitive to steady-state disturbance
torque inputs. So it is in dire need of carrying out research into disturbance influence on
platform accuracy. Qualitative analysis is applied in the study of factors which impact the
accuracy of an inertial navigation platform, and the error equation is derived by platform
model[6]. The approach of quantitative calculation is employed on the analysis of three major
factors, which are torque of mass imbalance, gimbal friction, and seeker head restoring torque,
effecting the missile tracking accuracy[5].An improved approach of qualitative analysis
combined with quantitative calculation is proposed in this paper, which is adopted in the
analysis of factors that affect the accuracy of an three-axis inertial stabilized platform for
airborne remote sensing systems. Complete simulation studies are performed to analyze the
affecting factors. The paper can provides technical support for the rapid development of a
high-precision, high reliability and low-cost inertial stabilized platform, which has theoretical
and practical significance.
2. MODEL OF THE INERITAL STABILIZED PLATFORM
An inertial stabilized platform for airborne sensing systems is of a three-gimbal mechanical
structure. From interior to exterior the gimbals are azimuth, pitch and roll gimbal. An azimuth
gyro is mounted on the azimuth gimbal, while a pitch gyro and a roll gyro are mounted on the
pitch gimbal. The gyro installing mode is the main difference from that of an inertial navigation
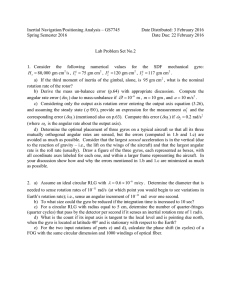
platform. The principle elements of a simplified inertial stabilized platform model is illustrated
in Figure 1. The model is completed by developing a suitable tracking and stabilization control
system.
Md =
Position
Compensation
θ cmd (s)
+
G pc (s)
-
Rate
Compensation
Drive
Motor
Grc (s )
Cm / Ra
Te s + 1
θ&in (s )
+
-
M dL
+ M dm
i
Gear
+
+
i (i − 1) J m
Gimbal
Ratio
+
i
+
gyro
Conversion
Matrix
θ&a (s ) 1 θ a (s )
θ&L (s )
1
Tct
(i 2 J m + J L ) s
S
Mm
Rate / Stabilization Loop
θ&&b (s )
Conversion Matrix between
gimbals and gyros
Gg
TGL
Position / Track Loop
POS
Figure 1 Model of an inertial stabilized platform
3. CONTROLLER OF STABILIZATION AND TRACK LOOP
The controllers of stabilization and track loop are designed based on the platform dynamic
performance requirements, which are σ % ≤ 30% and ts < 0.2s .
A PII 2 (proportional + integral + double integral) control scheme [7] is applied in the design of
rate controller, as PII 2 has high bandwidth, which ensures the platform to isolate disturbances
better, realize zero steady-state error of angular ouput, and improve the platform stability
stiffness. The rate controllers of azimuth, pitch and roll gimbal are as follows:
Grca ( s ) = 28.5 +
1534.2 30917
238.8 4812.7
148 2984.2
, Grcf ( s ) = 4.4 +
, Grcr ( s ) = 2.7164 +
+
+
+
2
2
s
s
s
s2
s
s
(1)
A PD control scheme is proposed in the design of position controller. The position controllers
of azimuth, pitch and roll gimbal are the same, as follows:
G pcj ( s) = 400 + 20s( j = a, f , r )
(2)
The dynamic performance of the adjusted stabilization loop and track loop are
respectively σ % : 25.9% ~ 26.3%, ts = 0.124s , and σ % = 0.208%, ts = 0.192s , which express that the
stabilization and track loop both meet the requirements. Furthermore, the track loop can achieve
excellent tracking performance, and less overshoot.
4. SIMULATION ANALYSIS OF THE FACTORS AFFECTING ON PLATFORM
ACCURACY
The values of various disturbance torques in actual remote sensing environment are estimated,
and an improved approach of qualitative analysis combined with quantitative calculation is
applied in the analysis of disturbance factors. Platform parameters are as follows:
ma = 94kg , mr = 120kg , m f = 105kg , ag = 1g , ad = ±1g , sa = s f = sr = 5mm , ia = 6.4 , i f = 6.6 , ir = 5.5 ,
J ma = 2.6 × 10−5 kg ⋅ m2 , J mf = 2.7 ×10−4 kg ⋅ m2 , J mr = 5.4 × 10−4 kg ⋅ m2 , , θ b = 5o sin(2π t )
Where m j ( j = a, f , r ) is the quality of one gimbal, ag is the gravity acceleration, ad is the
disturbance acceleration, s j is the eccentricity, i j is the gear ratio, J mj is motor moment of inertia,
θ b is base angular.
4.1 Mass Imbalance
The non-symmetry in structural design and non-uniform mass distribution of platform will result
in torque of mass imbalance. The calculation equation is
M dLj = F j ⋅ s j = m j ⋅ (ag + ad ) ⋅ s j ( j = a, f,r )
(3)
As a gear is appended between a motor and one gimbal to lower the motor speed and increase
the torque, the disturbance torque transmitted to the platform gimbal is required to be converted
to the equivalent torque of the motor side. The conversion formula is
M dj = M dLj / i j
(4)
Figure 2 indicates that the angular error ultimately tends to zero, and the max angular
displacement is less than 6" under the given disturbance above.
4.2 Base Coupling
The disturbance torque due to kinematic coupling of the vehicle base is as follows [3]:
M bj = θ&&b ⋅ i j (i j − 1) J mj ( j = a, f , r )
(5)
The effect of base coupling is illustrated in Figure 3. It can be observed that the platform
responses to this disturbance with the same frequency oscillation, and the max angular
displacement is less than 0.025" .
4.3 Gyro Drift
A high-precision open-loop fiber optic gyroscope is selected for the platform , with
characteristics of good stability, low cost, and zero drift with 0.001 ~ 0.003o / s .We can set
ωdrift = ωzero _ drift + 0.5 ⋅ ωzero _ drift ⋅ random for simulation, the gyro drift including regular and random
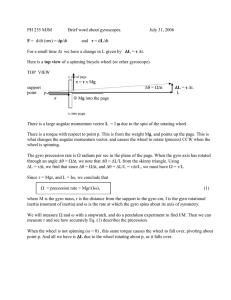
drift. Figure 4 shows the effect of gyro drift, which indicates that the angular error ultimately
tends to a steady state value less than 0.01" .
4.4 Gyro Misalignment
The actual angular rates of gyros with the effect of gyro misalignment can be derived by [8]
⎧ωf'x = (ω xf cos α fz + ω yf sin α fz ) cos α fy − ω za sin α fy
⎪⎪
'
f
a
f
⎨ ωfy = (ω y cos ε fx + ω z sin ε fx ) cos ε fz − ω x sin ε fz
⎪ '
a
f
f
⎪⎩ ωaz = (ω z cos ε ax − ω y sin ε ax ) cos ε ay + ω x sin ε ay
(7)
Where ωxf , ω yf and ωza are the ideal angular rates of gyros, α fz , αfy , ε fx , ε fz , ε ax and ε ay are gyro
misalignment angles. The simulation is performed with the condition of one degree gyro
misalignment angle and the disturbance torque M gm = 0.68sin(2π t ) N ⋅ m transmitted to the pitch
gimbal. Figure 5 shows the effect of gyro misalignment, which has less influence on the
platform.
4.5 Friction
The disturbance torque due to friction in the platform gimbal is described by [9]
M f = k ⋅ {Fc sgn[θ&(t )] + σθ&}
(8)
Where Fc is coulomb friction, σθ& is viscous friction, and θ& represents angular rate.
The simulation condition is as follows: k = 1 , Fc = 2.8 N ⋅ m , σ = 0.05 .The position loop input is
θ (t ) = 0.01sin(2π t )
(9)
Take the friction torque transmitted to the pitch gimbal for example. The effect of this
disturbance torque to the speed and position tracking is presented in Figure 6 and Figure 7. It
can be seen that both the curves of speed and position tracking are distorted under the friction
torque.
platform angular error curve
platform angular error curve
0.025
6
xf-axis
yr-axis
za-axis
4
0.015
3
0.01
2
1
0.005
0
0
-0.005
-1
-0.01
-2
-0.015
-3
-0.02
0
0.1
0.2
0.3
0.4
0.5
t(s)
0.6
0.7
0.8
0.9
xf-axis
yr-axis
za-axis
0.02
angular error(")
angular error(")
5
1
0
0.5
platform angular error curve
xf-axis
yr-axis
za-axis
-0.002
2.5
3
3.5
4
xf-axis
yr-axis
za-axis
0.4
0.3
-0.003
0.2
angular error(")
-0.004
-0.005
-0.006
0.1
0
-0.1
-0.007
-0.008
-0.2
-0.009
-0.3
0
0.1
0.2
0.3
0.4
0.5
t(s)
0.6
0.7
0.8
0.9
-0.4
1
Figure 4 Effect of gyro drift to angular error
0.08
0.5
1
1.5
2
t(s)
2.5
3
3.5
4
0.03
input
ouput
0.06
input
ouput
0.02
0.01
0.04
0.02
0
-0.02
-0.04
0
-0.01
-0.02
-0.03
-0.04
-0.06
-0.08
0
Figure 5 Effect of gyro gyro misalignment to angular error
speed tracking(rad/s)
angular error(")
2
t(s)
0.5
-0.001
speed tracking(rad/s)
1.5
platform(with amounting error)angular error curve
0
-0.01
1
-0.05
0
0.5
1
1.5
2
time(s)
2.5
3
3.5
4
-0.06
0.2
0.22
0.24
0.26
0.28
0.3
0.32
time(s)
0.34
0.36
0.38
0.4
-3
0.01
10
input
ouput
0.008
x 10
input
ouput
9
0.006
8
position tracking(rad)
position tracking(rad)
0.004
0.002
0
-0.002
-0.004
5
4
2
-0.008
5.
6
3
-0.006
-0.01
7
0
0.5
1
1.5
2
time(s)
2.5
3
3.5
4
1
0
0.05
0.1
0.15
0.2
0.25
time(s)
0.3
0.35
0.4
0.45
0.5
CONCLUSION
This paper presents an improved approach of qualitative analysis combined with quantitative
calculation, which is adopted in the analysis of factors that affect the accuracy of an three-axis
inertial stabilized platform for airborne remote sensing systems. Simulation studies are
performed to analyze the affecting factors, including mass imbalance, kinematic coupling, gyro
drift, gyro misalignment and friction. The Results show that the factors have difference effect on
platform accuracy. Among the factors, mass imbalance and friction have more influence.
However, other factors can not be ignored if high accuracy is required.
References
[1] Wei, L. D., Xiang, M. S., and Wu, Y. R., 2007. POS data using for motion compensation of
airborne InSAR. Remote sensing technology and application, 22(2), pp.188-194.
[2] Hilkert, J. M., 2008. Inertially stabilized platform technology: concepts and principles. IEEE
Control Systems Magazine, 28(1), pp. 26-46.
[3] Masten, M. K., 2008. Inertially stabilized platform for optical imaging system: tracking
dynamic targets with mobile sensors. IEEE Control Systems Magazine, 28 (1), pp.47-64.
[4] Yang, S. K., Wang, J. F., and Wang, J. Y., 2008. The combined technology of POS and
stabilized platform. Electronics Optics & Control, 15 (2), pp.62-65.
[5] Lin, C. L., and Hsiao, Y. H., 2001. Adaptive feedforward control for disturbance torque
rejection in seeker stabilizing loop. IEEE Transactions on Control Systems Technology, 9(1),
pp.108-121.
[6] Qing, Y. Y., 2006. Inertial Navigation. Science Press, Beijing, P.R. China, pp.133-164.
[7] Han, Y. G., Lu, Y. H., and Qiu, H. T., 2007. An Improved Control Scheme of Gyro
Stabilization Electro-Optical Platform. Processing of the 2007 IEEE International Conference on
Control and Automation, Guangzhou, P.R. China, pp.346-351.
[8] Li, Y., Zhang Z. Y., and Fan D. P., 2007. Principle of the effect of gyro misalignment on the
stabilization platforms accuracy. Opto-Electronic Engineering, 34(9), pp.10-15.
[9] Wang, Y., He, Z., and Su, B. K., 2004. Simulation of the friction model on Simulink. Electric
Machines and Control, 8(1), pp.60-62.