Controllability of Spacecraft Attitude using Control Moment
advertisement

Proceedings of the 2006 American Control Conference
Minneapolis, Minnesota, USA, June 14-16, 2006
ThC03.6
Controllability of Spacecraft Attitude using Control Moment Gyroscopes
Sanjay P. Bhat
Pawan K. Tiwari
Department of Aerospace Engineering
Directorate of Tactical Missile Systems
Indian Institute of Technology
Defense Research and Development Laboratory
Powai, Mumbai 400076, India
Kanchanbagh, Hyderabad 500058, India
Abstract— This paper describes an application of nonlinear
controllability theory to the problem of spacecraft attitude
control using control moment gyroscopes (CMGs). Nonlinear
controllability theory is used to show that a spacecraft carrying
one or more CMGs is controllable on every angular momentum
level set in spite of the presence of singular CMG configurations,
that is, given any two states having the same angular momentum, any one of them can be reached from the other using
suitably chosen motions of the CMG gimbals. This result is
used to obtain sufficient conditions on the momentum volume of
the CMG array that guarantee the existence of gimbal motions
which steer the spacecraft to a desired spin state or rest attitude.
I. I NTRODUCTION
Momentum exchange devices such as reaction wheels and
control moment gyroscopes (CMGs) form an important class
of torque actuators for spacecraft attitude control. Unlike
mass expulsion devices which alter the total angular momentum of the spacecraft, momentum exchange devices operate
by changing the distribution of the angular momentum
inside the spacecraft. Momentum exchange devices typically
consist of spinning disks which exchange momentum with
the rest of the spacecraft through mutual interaction torques
that either change the speed of rotation as in reaction wheels,
or change the orientation of the spin axis as in CMGs, or
change both as in variable speed CMGs.
CMGs are capable of producing significant torques and
can handle large quantities of momentum over long periods
of time. Consequently, CMGs are preferred in precision
pointing applications and in momentum management of
large, long-duration spacecraft. See, for instance, [1].
A CMG comprises of a rapidly spinning rotor mounted
on one or two gimbals. The orientation of the rotor can be
changed by applying torques to the gimbals, and the reaction
torque thus generated serves to control the spacecraft attitude.
The magnitude of torque produced by the CMG is a function
of the constant rotor speed and gimbal rotation rate.
A CMG may have one or two gimbals, and is accordingly
called a single gimbal CMG (SGCMG) or a double gimbal
CMG (DGCMG). In both cases the orientation of the angular
momentum vector is determined by the gimbal angles. In
the case of a SGCMG, the rotor is constrained to rotate
on a circle in a plane normal to the gimbal axis. Hence,
This work has been supported in part by the ISRO-IITB Space Technology Cell, Indian Institute of Technology – Bombay.
3624
a SGCMG cannot produce torques in all directions. While
a DGCMG possesses an additional degree of freedom, its
angular momentum vector is constrained to move along a
sphere as the two gimbal angles are varied. Consequently, in
any given configuration, a DGCMG can only produce torques
that are orthogonal to the angular momentum vector.
In order to obtain torques along three independent directions, as well as for redundancy, CMGs are used in arrays
consisting of multiple CMGs. Unfortunately, every CMG
array possesses singular configurations [2]. For each singular
configuration, there exist singular directions along which the
CMG array is unable to produce torque. More precisely, the
mapping from gimbal angle rates to output torque becomes
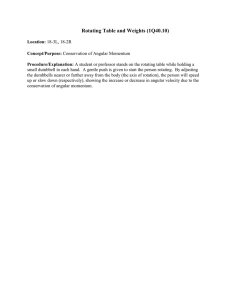
singular at singular configurations [3]. Figure 1 shows a
singular configuration for a system of four CMGs arranged
in a pyramid array. The arrows h1 , h2 , h3 and h4 represent
the angular momentum vectors of the individual CMGs. Each
of these vectors is constrained to rotate in the plane of the
pyramid face containing it. In the CMG configuration shown
in Figure 1, h1 and h3 are in the XZ plane, while h2 and
h4 are parallel to the X-axis. An infinitesimal rotation of
the vectors h1 and h3 causes a torque in the direction of
Y -axis. Similarly, an infinitesimal rotation of the vectors
h2 and h4 causes a torque in the Y Z plane. Thus, in the
configuration shown, no combination of gimbal rates can
produce a torque in the X-direction and hence, the X-axis
represents a singular direction corresponding to this singular
configuration.
The standard approach to attitude control using CMGs is to
compute the torque required to achieve the desired spacecraft
behavior, and then invert the kinematic map from gimbal
angle rates to CMG torque to find the gimbal angle rates
that produce the required torque. This approach overlooks
the dynamical interaction between the spacecraft and the
CMG array, and instead treats the CMG array in isolation as
only a torque producing device. Consequently, this approach
encounters difficulties near singular CMG configurations at
which the the kinematic map from gimbal angle rates to gyroscopic torque becomes singular. A considerable amount of
research related to CMGs has focused on steering algorithms
to maneuver CMG arrays to produce desired torque profiles
while avoiding singular configurations [3]–[8].
While the ability to generate arbitrary torque profiles
may be necessary for certain control objectives such as
by properties of the CMG array. We give sufficient conditions
on the momentum volume of the CMG array that guarantee
the existence of gimbal motions that steer the spacecraft to
a desired spin state or rest attitude for a given total inertial
angular momentum.
All our results hold in spite of the presence of singular
configurations, indicating that the presence of singular configurations does not obstruct the ability to steer the spacecraft
to desired attitudes and angular velocities.
Z
Y
h2
h3
h1
h4
II. P RELIMINARIES
X
Fig. 1.
A singular configuration in a pyramid array of CMGs
tracking reference attitude trajectories, it is not evident that
control objectives such as attitude stabilization or steering
the spacecraft to a desired terminal state require such an
ability. In the case of objectives such as stabilization or
steering, it may be more fruitful to apply system and control
theoretic tools to the combined dynamics of the spacecraft
and the CMG array rather than to view the CMG array as
only a torque producing device. Given the significant amount
of attention that the problem of singular configurations has
received in the attitude control literature, it is of interest to
know exactly which system theoretic properties are affected
by the presence of singular configurations.
The purpose of this paper is to investigate if the presence
of singular configurations poses an obstruction to attitude
controllability. More precisely, we analyze the controllability
properties of the attitude dynamics of a spacecraft carrying
an array of SGCMGs by treating the CMG gimbal rates as
inputs. Attitude controllability under actuation by thrusters,
reaction wheels or magnetic torquers has been studied previously [9], [10]. However, due to the presence of singular
configurations, the problem of attitude controllability using
CMGs as actuators is very different from the problem of
attitude controllability using thrusters, reaction wheels or
magnetic torquers as actuators.
After introducing the necessary preliminaries in Section
II, we review the attitude dynamics of a rigid spacecraft
carrying a CMG array in Section III. The inertial components
of the combined angular momentum of the spacecraft and
the CMG array are constant. Thus the combined dynamics
of the spacecraft–CMG system evolve on level sets of
the angular momentum. In Section IV, we show that the
dynamics are strongly accessible and controllable on every
angular momentum level set. Thus the system can be steered
between any two states having the same total inertial angular
momentum. This result is independent of the number and
arrangement of CMGs in the CMG array. However, the
ability to steer the spacecraft to a desired terminal attitude
and angular velocity depends on the nature of the angular
momentum level set which, as we illustrate, is determined
The set SO(3) of 3 × 3 special orthogonal matrices is a
three-dimensional Lie group. The Lie algebra so(3) of SO(3)
is the set of 3 × 3 real skew-symmetric matrices with the
matrix commutator as the bracket operation. We denote by
× the usual cross product on R3 . R3 is a Lie algebra under
the cross product operation. Define S : R3 → so(3) by
⎤
⎡
0
−a3 a2
0
−a1 ⎦ , a ∈ R3 .
S(a) = ⎣ a3
−a2 a1
0
For every a ∈ R3 , S(a) is simply the matrix representation
in the standard basis of the linear map b → (a × b) on R3 .
The map S is a Lie algebra homomorphism, that is, S is
a bijective linear map satisfying S(a × b) = S(a)S(b) −
S(b)S(a) for every a, b ∈ R3 . We denote the tangent space
to SO(3) at R ∈ SO(3) by TR SO(3). For every R ∈ SO(3),
TR SO(3) = {RG : G ∈ so(3)} = {RS(g) : g ∈ R3 }.
We denote the Euclidean norm on R3 by · and the
two-dimensional unit sphere {x ∈ R3 : x = 1} by S2 .
Given a C∞ manifold N and a C∞ vector field f on N ,
we let φf : (t, x) → φft (x) denote the flow of f . The flow is
defined on an open subset of R × N [11, Prop. 2.1.15]. The
vector field f is complete if its flow is defined on R × N .
If f is complete, then φft : N → N is a diffeomorphism for
every t ∈ R.
A complete vector field f on N is weakly positively
Poisson stable if, for every open set U ⊆ M and every
t > 0, there exists T > t such that φfT (U) ∩ U = ∅.
Given two vector fields f and g on a smooth manifold
N , we denote their Lie bracket by [f, g]. If N is an embedded submanifold of a manifold M, and fˆ and ĝ are C∞
extensions to M of the vector fields f and g, respectively,
then [f, g] is the restriction of [fˆ, ĝ] to N . In particular, if
M = Rn for some n, then, for every x ∈ N ⊆ M, the
canonical identification between Tx M and Rn yields
d [ĝ(x + hf (x)) − fˆ(x + hg(x))]. (1)
[f, g](x) =
dh h=0
In the sequel, we will find it convenient to apply the formula
(1) to vector fields defined on SO(3), which can be viewed
as an embedded submanifold of Rn for n = 9. An alternative
approach to computing Lie brackets on SO(3) is described
in [12], [13].
III. ATTITUDE DYNAMICS
We describe the attitude of a rigid body using a matrix R ∈
SO(3) such that the multiplication of the body components
3625
of a vector by R gives the components of that vector with
respect to a reference inertial frame. The attitude kinematics
of the spacecraft are then described by the equation
Ṙ(t) = R(t)S(ω(t)),
(2)
3
where ω(t) ∈ R denotes the instantaneous body-frame
components of the angular velocity of the spacecraft relative
to the reference inertial frame.
Next, we consider the dynamics of a rigid spacecraft that
is equipped with an array of q > 0 SGCMGs. The instantaneous body components of the total angular momentum
vector of the spacecraft with respect to an inertial observer
are given by
H(t) = Jω(t) + ν(θ(t)),
(3)
where J ∈ R3×3 is the symmetric moment-of-inertia matrix
of the spacecraft about the body-fixed frame, and ν :
Rq → R3 gives the body components of the spin angular
momentum of the CMG array as a function of the vector of
T
gimbal angles θ = [θ1 · · · θq ] ∈ Rq .
For every θ ∈ Rq , the vector ν(θ) can be written as ν(θ) =
ν1 (θ1 ) + ν2 (θ2 ) + . . . + νq (θq ), where νi : R → R3 gives
the body components of the spin angular momentum of the
ith CMG as a function of the ith gimbal angle θi ∈ R.
For each i = 1, . . . , q, we denote by νi : R → R3 and
νi : R → R3 the first and second derivatives, respectively,
of νi with respect to θi . Since the spin angular momentum
of each CMG is constant in magnitude and is constrained
to move along a circle, it follows that νi (θi ) is orthogonal
to νi (θi ) while νi (θi ) is directed along −νi (θi ) for every
i = 1, . . . , q, and every θi ∈ R.
Assuming that no external torques act on the spacecraft,
the equation representing the attitude dynamics of the spacecraft are given by the Euler’s equations,
d
H(t) + ω(t) × H(t) = 0.
(4)
dt
Substituting from (3) in (4) yields
J ω̇(t) =
− ω(t) × (Jω(t) + ν(θ(t)))
q
νi (θi (t))ui (t)
−
(5)
i=1
θ̇i (t) = ui (t), i = 1, 2, . . . , q,
(6)
where θ̇i is the gimbal rate of the ith CMG. In deriving
(5), we have assumed that the moments of inertia of the
CMG gimbals are negligible in comparison with those of
the spacecraft, so that the matrix J does not depend on the
gimbal angles.
Equations (2), (5) and (6) represent a control system on
the (6 + q)-dimensional manifold SO(3) × R3 × Rq with
gimbal rates ui , i = 1, . . . , q, as inputs.
The inertial components of the total angular momentum
of the spacecraft give rise to a function P : SO(3) × R3 ×
Rq → R3 given by P (R, ω, θ) = R(Jω + ν(θ)). Since
the inertial components of the total angular momentum are
constant along the motion of the spacecraft, for every initial
inertial angular momentum μ ∈ R3 , the dynamics given by
(2), (5) and (6) evolve on the angular momentum level set
def
Mμ = P −1 (μ) ⊆ SO(3) × R3 × Rq . It follows that the
control system defined by (2), (5) and (6) is not controllable
on the manifold SO(3) × R3 × Rq .
To investigate the controllability of the system (2), (5) and
(6) on an angular momentum level set, suppose μ ∈ R3 . It
is easy to verify that the map φμ : SO(3) × Rq → SO(3) ×
R3 × Rq given by φμ (R, θ) = (R, J −1 (RT μ − ν(θ)), θ) is
a diffeomorphism between SO(3) × Rq and Mμ . Hence the
angular momentum level set is diffeomorphic to the (3 +
def
q)-dimensional manifold N = SO(3) × Rq . On Mμ , the
attitude kinematics (2) reduce to
Ṙ(t) = R(t)S(J −1 {RT (t)μ − ν(θ(t))}).
(7)
Equations (6) and (7) describe the combined dynamics of
the spacecraft and the CMG array on the angular momentum
level set Mμ , and define a control system of the form
ẏ(t) = fμ (y(t)) + g1 (y(t))u1 (t) + · · · + gq (y(t))uq (t), (8)
on the manifold N , where y = (R, θ) ∈ N represents the
spacecraft attitude and the CMG configuration. The drift
vector field fμ and the control vector fields g1 , g2 , . . . , gq ,
are analytic vector fields on N given by
fμ (R, θ) = RS J −1 RT μ − ν(θ) , 0 , (9)
gi (R, θ) = (0, ei ),
(10)
where, for each i = 1, 2, . . . , q, ei ∈ Rq is the vector
whose ith element is 1, the rest being zero. In order to
apply standard controllability results such as those described
in [14], we assume that the vector of gimbal rates u =
[u1 · · · uq ]T is a piecewise continuous function of time that
has finite right and left limits at every instant of discontinuity,
and that takes values in a connected set Ω ⊆ Rq containing
0 in its interior.
The gimbal angles remain constant along the flow of
the drift vector field. The drift vector field thus describes
the rotational motion of a rigid body carrying rotors. Since
SO(3) is compact, it follows that the drift vector field is
complete [11, Corr. 2.1.19].
IV. C ONTROLLABILITY A NALYSIS
The reachable set of the system (8) from x ∈ N at time
T ≥ 0 is the set R(x, T ) of all states that can be reached at
time T by following solutions of (8) that start at x at t = 0.
The reachable set of the system from x ∈ N is simply the set
∪T ≥0 R(x, T ) of all states that can be reached by following
solutions of (8) that start at x at t = 0. The system (8) is
strongly accessible if R(x, T ) has a nonempty interior in
N for every x ∈ N and every T > 0, and controllable if
∪T ≥0 R(x, T ) = N for every x ∈ N . It is clear that, given
μ ∈ R3 , the controllability of (8) implies that the set of
states in SO(3) × R3 × Rq that can be reached by following
solutions of (2), (5) and (6) is Mμ .
The following theorem is our main result.
Theorem 4.1: For every μ ∈ R3 , the system (8) is
strongly accessible and controllable on N .
The proof of Theorem 4.1 depends on the following result
concerning the behavior of the uncontrolled system obtained
by setting the gimbal rates to zero in (8).
3626
Proposition 4.1: For every μ ∈ R3 , the vector field fμ
is weakly positively Poisson stable on N .
Proof:
Let μ ∈ R3 , θ ∈ Rq , and consider the vector field h on SO(3) defined by h(R) =
RS J −1 RT μ − ν(θ) . Since the gimbal angles do not
change along the vector field fμ , it is sufficient to show
that the vector field h is weakly positively Poisson stable on
SO(3).
Define a differential form Ω on SO(3) by
ΩR (V1 , V2 , V3 ) = v1T (v2 × v3 ), where R ∈ SO(3),
Vi ∈ TR SO(3), i = 1, 2, 3, and vi = S −1 (RT Vi ) ∈ R3 ,
i = 1, 2, 3. The form Ω is a (nondegenerate) volume
form since ΩR (V1 , V2 , V3 ) is nonzero whenever
Vi ∈ TR SO(3), i = 1, 2, 3, are linearly independent.
Moreover, Ω is left invariant, that is, for every
S ∈ SO(3), R ∈ SO(3) and Vi ∈ TR SO(3), i = 1, 2, 3,
ΩSR (SV1 , SV2 , SV3 ) = ΩR (V1 , V2 , V3 ). We claim that the
flow of h preserves the volume form Ω, that is, the Lie
derivative of Ω along h is zero.
To compute the Lie derivative Lh Ω, let R ∈ SO(3), and
let Vi ∈ TR SO(3), i = 1, 2, 3. There exist left invariant
vector fields ξi , i = 1, 2, 3, on SO(3) such that ξi (R) =
Vi , i = 1, 2, 3. Define p : SO(3) → R by p(S) =
ΩS (ξ1 (S), ξ2 (S), ξ3 (S)). We use Proposition 2.4.15 of [11]
to compute
(Lh Ω)R (V1 , V2 , V3 ) = (Lh p)(R)
− ΩR ([h, ξ1 ](R), ξ2 (R), ξ3 (R))
− ΩR (ξ1 (R), [h, ξ2 ](R), ξ3 (R))
− ΩR (ξ1 (R), ξ2 (R), [h, ξ3 ](R)).
(11)
Since Ω as well as the vector fields ξ1 , ξ2 , ξ2 are
left invariant, it follows that ΩS (ξ1 (S), ξ2 (S), ξ3 (S)) =
ΩI (ξ1 (I), ξ2 (I), ξ3 (I)) for every S ∈ SO(3), where I is the
identity matrix in SO(3). The function p is thus a constant
function, and hence the first term on the righthandside of
(11) is zero.
To compute the last three terms on the righthandside of
(11), we use (1) to compute
[h, ξi ](R) = RS(α(R) × vi ) + RS(J −1 (vi × β(R))), (12)
where α : SO(3) → R3 and β : SO(3) → R3 are given by
α(R) = J −1 (RT μ − ν(θ)) and β(R) = RT μ, respectively,
while vi = S −1 (RT Vi ) = S −1 (ξi (I)) ∈ R3 , i = 1, 2, 3.
The identity aT J −1 (J −1 b × J −1 c) = (det J −1 )aT (b × c),
a, b, c ∈ R3 , can be used to show that J −1 (vi × β(R)) =
(det J −1 )(Jvi × Jβ(R)). Familiar properties of the cross
product and the triple scalar product on R3 can now be used
to show that the sum of the last three terms in (11) is zero.
It now follows that the flow of h preserves the volume
form Ω on SO(3). Since SO(3) is compact, it follows from
Poincarè’s Recurrence Theorem [15, §16] that the vector field
h, and hence the drift vector field fμ , is weakly positively
Poisson stable.
def
Proof of Theorem 4.1: Let μ ∈ R3 . Let ξ1 = [g1 , fμ ],
def
def
ξ2 = [g1 , ξ1 ] and ξ3 = [ξ1 , ξ2 ]. Treating the drift and control
vector fields of (8) as vector fields on R3×3 × Rq and using
(1) yields
ξ1 (x)
=
ξ2 (x)
=
ξ3 (x)
=
−RS J −1 ν1 (θ1 ) , 0 ,
RS J −1 ν1 (θ1 ) , 0 ,
−1 RS J ν1 (θ1 ) × J −1 ν1 (θ1 ) , 0 ,
where x = (R, θ) ∈ N .
Since ν1 (θ1 ) is orthogonal to ν1 (θ1 ) while ν1 (θ1 ) is
directed along −ν1 (θ1 ), it follows that the vector fields ξ1 , ξ2
and ξ3 are linearly independent at every point in N . Clearly,
the control vector fields g1 , . . . , gq are mutually linearly
independent as well as linearly independent from the vector
fields ξ1 , ξ2 and ξ3 at every x ∈ N . Since the vector fields
ξ1 , ξ2 , ξ3 , g1 , . . . , gq are contained in the strong accessibility
algebra [16, Prop. 3.20], it follows from [14, Corr. 4.7], [16,
Thm. 3.21] that the system (8) is strongly accessible. Strong
accessibility implies accessibility. By Proposition 4.1, the
drift vector field of (8) is weakly positively Poisson stable.
Controllability now follows from Theorem 3 of [13].
The assertion of controllability in Theorem 4.1 implies
that, for every μ ∈ R3 , the set of states reachable from every
z ∈ Mμ ⊆ SO(3) × R3 × Rq is Mμ . In other words, the
system described by (2), (5) and (6) can be steered between
any two states lying on the same angular momentum level
set by using suitable gimbal motions. It should be noted that
this result is independent of the number and arrangement of
CMGs in the CMG array. It is also worth emphasizing that,
as in the case of typical controllability results, the proof of
Theorem 4.1 is only existential and not constructive. While
Theorem 4.1 guarantees the existence of gimbal motions that
steer the system (2), (5)-(6) between two arbitrarily specified
states lying on an angular momentum level set, the proof does
not provide an explicit construction of such gimbal motions.
Practical applications involve steering the spacecraft to
a desired combination of attitude and angular velocity,
while the corresponding terminal CMG configuration is not
specified. For instance, typical applications could require
maneuvering the spacecraft to a desired arbitrary rest attitude,
or to a state such that the spacecraft spins about a desired
body-fixed axis which also coincides with a desired inertial
direction. Such maneuvers are possible only if the angular
momentum level set containing the initial state contains a
“rich” supply of states in SO(3) × R3 × Rq that project
onto the desired terminal attitudes and angular velocities in
SO(3) × R3 . In other words, while the system is guaranteed
to be controllable on every angular momentum level set
irrespective of the nature of the CMG array, our ability to
maneuver the spacecraft to practically useful states depends
on the structure of the angular momentum level set which,
as our next result illustrates, depends on the CMG array.
Our next result gives a sufficient condition on the CMG
array for a given angular momentum level set to contain
all states in which the spacecraft is instantaneously spinning
about a given body-fixed axis at a given spin rate. The condition on the CMG array is stated in terms of its momentum
def
volume, the set V = ν(Rq ) ⊆ R3 of all possible angular
momentum vectors of the CMG array.
3627
Proposition 4.2: If μ ∈ R3 , Ω ∈ R and γ ∈ S2 are such
that V contains a sphere of radius μ centered at −ΩJγ,
then, for every ζ ∈ S2 , every state on Mμ can be steered
to a state in which the spacecraft rotates instantaneously at
the rate Ω about a unit vector whose body components are
given by γ and inertial components are given by ζ.
Proof: Suppose μ ∈ R3 , Ω ∈ R and γ ∈ S2
are such that V contains a sphere of radius μ centered
at −ΩJγ. Then, for every R ∈ SO(3), it follows that
RT μ − ΩJγ ∈ V, that is, there exists θ ∈ Rq such that
R(ΩJγ + ν(θ)) = μ. It now follows that, for every ζ ∈ S2
and every R ∈ SO(3) satisfying Rγ = ζ, there exists θ ∈ Rq
such that (R, ΩJγ, θ) ∈ Mμ . The result now follows from
the assertion of controllability in Theorem 4.1.
The previous result gives sufficient conditions under which
the spacecraft can be maneuvered to a state of spin about
a desired instantaneous body-fixed axis that is also oriented
along a desired inertial direction. It should be noted, however,
that Proposition 4.2 does not assert that such a spin state
can be maintained for any length of time. The angular
momentum variation of the CMG array that is required to
sustain spinning motion at a spin rate Ω about a unit vector
having body components γ ∈ S2 is periodic and given by
t → exp(−ΩtS(γ))μ − ΩJγ,
(13)
where exp : so(3) → SO(3) is the matrix exponential and
μ ∈ R3 gives the constant inertial components of the total
angular momentum. While the hypotheses of Proposition 4.2
guarantee that the righthandside of (13) is contained in the
momentum volume V at every instant, it is not clear if there
always exist smooth gimbal motions that give rise to the
variation (13) required to sustain the spinning motion in the
case where μ = 0.
The corollary below specializes Proposition 4.2 the case
where the spacecraft has to be maneuvered to come to rest
in a desired attitude.
Corollary 4.1: Suppose μ ∈ R3 is such that V contains
a sphere of radius μ centered at the origin. Then, for every
desired attitude, every state in Mμ can be steered to a state
in which the spacecraft is at rest in the desired attitude.
Proof: The result follows from Proposition 4.2 by
letting Ω = 0.
V. C ONCLUSION
We have shown that, irrespective of the number and
arrangement of CMGs, it is possible to steer the combined
system comprising the spacecraft and CMGs between arbitrary states having the same total inertial angular momentum.
However, the ability to steer the spacecraft to a desired ter-
minal combination of attitude and angular velocity for a
given total angular momentum depends on the CMG array.
We have given sufficient conditions on the CMG array under
which it is possible to steer the spacecraft to a desired
spin state or rest attitude for a given total inertial angular
momentum. Our results hold in spite of the fact that every
CMG array possesses singular configurations, indicating that
the presence of singular configurations does not pose an
obstruction to attitude controllability. It remains an open
problem to determine whether singular configurations pose
an obstruction to other system theoretic properties such as
stabilizability and small time local controllability.
R EFERENCES
[1] W. E. Haynes, “Control moment gyros for the space shuttle,” in IEEE
Position Location and Navigation Symposium, New York, NY, 1984,
pp. 113–115.
[2] G. Murgulies and J. N. Aubrun, “Geometric theory of single-gimbal
control moment gyro systems,” Journal of Astronautical Sciences, vol.
XXVI, no. 2, pp. 159–191, 1978.
[3] R. H. Kraft, “CMG singularity avoidance in attitude control of a flexible spacecraft,” in Proceedings of the American Control Conference,
San Fransisco, CA, 1993, pp. 56–58.
[4] J. Paradiso, “Global steering of single gimballed control moment
gyroscopes using a directed search,” Journal of Guidance, Control
and Dynamics, vol. 15, no. 5, pp. 1237–1244, 1992.
[5] N. S. Bedrossian, J. Paradiso, E. V. Bergmann, and D. Rowell,
“Steering law design for redundant single-gimbal control moment
gyroscopes,” Journal of Guidance, vol. 13, no. 6, pp. 1083–1089,
1990.
[6] M. D. Kuhns and A. A. Rodriguez, “Singularity avoidance control laws
for a multiple CMG spacecraft attitude control system,” in Proceedings
of the American Control Conference, Baltimore, MD, 1994, pp. 2892–
2893.
[7] S. R. Vadali, H.-S. Oh, and S. R. Walker, “Preferred gimbal angles for
single gimbal control moment gyros,” Journal of Guidance, vol. 13,
no. 6, pp. 1090–1095, 1990.
[8] H. Kurokawa, “Constrained steering law of pyramid-type control
moment gyros and ground tests,” Journal of Guidance, Control, and
Dynamics, vol. 20, no. 3, pp. 445–449, 1997.
[9] P. E. Crouch, “Spacecraft attitude control and stabilization: Applications of geometric control theory to rigid body models,” IEEE
Transactions on Automatic Control, vol. 29, no. 4, pp. 321–331, 1984.
[10] S. P. Bhat, “Controllability of nonlinear time-varying systems: Applications to spacecraft attitude control using magnetic actuation,” IEEE
Transactons on Automatic Control, to appear.
[11] R. Abraham and J. E. Marsden, Foundations of Mechanics. Reading,
Massachusetts: Addison-Wesley, 1978.
[12] K.-Y. Lian, L.-S. Wang, and L.-C. Fu, “Global attitude representation
and its Lie bracket,” in Proceedings of the American Control Conference, San Francisco, CA, June 1993, pp. 425–429.
[13] ——, “Controllability of spacecraft systems in a central gravitational
field,” IEEE Transactions on Automatic Control, vol. 39, no. 12, pp.
2426–2441, 1994.
[14] H. J. Sussmann and V. Jurdjevic, “Controllability of nonlinear systems,” Journal of Differential Equations, vol. 12, pp. 95–116, 1972.
[15] V. I. Arnold, Mathematical Methods of Classical Mechanics, 2nd ed.
New York: Springer-Verlag, 1989.
[16] H. Nijmeijer and A. J. van der Schaft, Nonlinear Dynamical Control
Systems. New York: Springer-Verlag, 1990.
3628