Development of a 35-MHz Piezo-Composite Ultrasound Array
advertisement

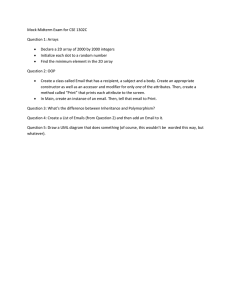
224 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 Development of a 35-MHz Piezo-Composite Ultrasound Array for Medical Imaging Jonathan M. Cannata, Member, IEEE, Jay A. Williams, Qifa Zhou, Timothy A. Ritter, and K. Kirk Shung, Fellow, IEEE Abstract—This paper discusses the development of a 64element 35-MHz composite ultrasonic array. This array was designed primarily for ocular imaging applications, and features 2-2 composite elements mechanically diced out of a fine-grain high-density Navy Type VI ceramic. Array elements were spaced at a 50-micron pitch, interconnected via a custom flexible circuit and matched to the 50-ohm system electronics via a 75-ohm transmission line coaxial cable. Elevation focusing was achieved using a cylindrically shaped epoxy lens. One functional 64-element array was fabricated and tested. Bandwidths averaging 55%, 23-dB insertion loss, and crosstalk less than 24 dB were measured. An image of a tungsten wire target phantom was acquired using a synthetic aperture reconstruction algorithm. The results from this imaging test demonstrate resolution exceeding 50 m axially and 100 m laterally. ; I. Introduction igh frequency (> 30 MHz) ultrasound is currently used for various imaging applications in ophthalmology [1]–[3], dermatology [4], [5], and small animal studies [6], [7]. At present there are several commercial ultrasound systems available for use in the 25-MHz to 50-MHz frequency range1 . These systems rely upon single-element transducers that are mechanically scanned in a line or arc to form an image slice. Array systems, on the other hand, are desired because they use electronic scanning to do so. Arrays also lack movable parts that may be hazardous to patients, can be steered and dynamically focused in the image plane, and can achieve higher image frame rates. Unfortunately at the present time commercial array systems are not yet available at frequencies above 30 MHz due mainly to limitations in fabrication technology and equipment, as well as a lack of quality high-frequency materials and electronics. Despite these limitations, a few investigators have successfully designed and built high-frequency ultrasonic arrays. The efforts of these researchers are summarized next. H Manuscript received April 11, 2005; accepted July 15, 2005. The authors would like thank the National Institutes of Health (NIH) for providing the funding through grant # P41-EB2182. J. M. Cannata, J. A. Williams, Q. Zhou, and K. K. Shung are with the NIH Resource on Medical Ultrasonic Transducer Technology, Department of Biomedical Engineering, University of Southern California, Los Angeles, CA (e-mail: cannata@usc.edu). T. A. Ritter is with the U.S. Air Force, Keesler Air Force Base, Biloxi, MS. 1 Systems include those by VisualSonics, Inc., Toronto, Ontario, Canada, http://www.visualsonics.com; Ultralink LLC., St. Petersburg, FL, http://www.arcscan.com; and Capistrano Labs, Inc., San Clemente, CA http://www.capolabs.com. Lower-frequency arrays typically use mechanical dicing to separate array elements, whereby elements are cut from a plate of piezoelectric ceramic or single crystal and backfilled with a polymer filler [8]. This technique generally has been limited to arrays designed to operate in the less-than 20-MHz range. However, in recent years, several studies have proven that it is a viable option for manufacturing arrays with operational center frequencies up to 30 MHz [9]–[11]. The most sophisticated of the arrays built was the 128-element 30-MHz 1-3 piezo-composite array developed by Michau et al. [11]. This array was designed to have an element-to-element spacing, or pitch, of approximately 2λ in water or 100 µm, with composite posts and array elements both separated using a mechanical dicing saw. Alternately, a 48-element 30-MHz array was developed using a patented process of bonding thin plates of piezoceramic with a carefully engineered microsphere-loaded polymer to create a 2-2 piezo-composite matrix [12], which was then mechanically diced to form individual array elements [13]. This array was also designed for a 100-µm pitch. As an alternative to mechanical dicing, several investigators have fabricated arrays in the 20–30 MHz range using thin sheets of piezo-polymer materials [14], [15]. Low lateral coupling and low acoustic impedance for polyvinylidene fluoride (PVDF) and poly(vinylidene fluoride-trifluoroethylene) (P(VDF-TrFE)) make these materials good choices for high-frequency array design. Unfortunately the low capacitance of these materials and the high parasitic capacitance of typical preamplifier inputs preclude the use of suitably sized active elements for high-frequency operation [16]. Other kerfless linear array designs incorporating high dielectric piezoceramics have been evaluated but have yet to be fabricated at high frequencies [17]. For array development at very high frequencies sol-gel deposition of thin and thick films of lead-zirconate-titanate (PZT) are viable options. Lukacs et al. [18] reported the use of sol-gel deposition of PZT films in the fabrication of 50–200 MHz singleelement transducers and 40–60 MHz arrays. Mechanical separation of elements was achieved using laser dicing technology. Unfortunately the porosity of the film produced poor piezoelectric properties, with a thickness-mode coupling coefficient (kt ) of lower than 25% and a low relative clamped dielectric permittivity (εS33 < 250). Improvements in this technique are ongoing, with reported piezoelectric coupling as high as 50% [19]. Sputtering thin PZT films is another option for fabrication of very-high-frequency arrays, but as with sol-gel deposition this method has been shown to produce reduced piezoelectric properties when c 2006 IEEE 0885–3010/$20.00 cannata et al.: 35-mhz piezo-composite ultrasound array 225 TABLE I Initial Design Goals for the 35-MHz Array. Center frequency Number of elements Element-to-element spacing (pitch) Elevation aperture Elevation focus Bandwidth (−6 dB) −20 dB pulse length Crosstalk (element-to-element) 35 MHz 64 50 µm (1.2λ) 3 mm 10 mm > 50% < 120 ns <−30 dB compared to bulk PZT [20]. Sputtered ZnO was used to fabricate a novel 100-MHz array for nondestructive testing [21]. This array used a sapphire lens for elevation focusing and a single matching layer for acoustic coupling. Elements were separated with a 100-µm pitch (6.7λ) by wet etching through the top chrome/gold electrode as well as the ZnO. Unfortunately the large element pitch produced (approximately 7λ in water at 100 MHz) makes this array difficult to use in medical imaging applications. In recent years nonpiezoelectric transducers have become a viable alternative to piezoelectric-based transducer designs. Work conducted by Buma et al. concluded that optical generation of sound using the thermoelastic effect is a promising alternative to piezoelectricity for very-high-frequency two-dimensional (2-D) arrays [22]. Alternately, capacitive micromachined ultrasonic transducer (CMUT) fabrication techniques have been proven effective in fabricating arrays up to 45 MHz [23]. Lastly, several researchers have proposed array designs that circumvent the very small spatial scaling required for high-frequency linear and phased arrays [24], [25]. Both the split aperture array designs by Talman and Lockwood [24] and the actuated array design by Ritter et al. [25] have been shown to be capable of producing highresolution images, and may provide excellent opportunities for experimental studies at high frequencies in the future. This paper describes the design, fabrication, and evaluation of a 64-element 2-2 composite 35-MHz array. Individual array elements were spaced at a 50-µm pitch (1.2λ in water) and were 3 mm long in the elevation direction. Mechanical dicing was used to form the composite elements out of a bulk piece of fine-grain high-density Navy Type VI ceramic. Elevation focusing was achieved using a cylindrically shaped epoxy lens. Element interconnection was made with a custom-designed flexible circuit and a quarter-wavelength, 75-Ω, coaxial cable. The initial design goals for this array are listed in Table I. II. Methods Fig. 1 displays a cutaway view of the array and all major design components. Each array element incorporated two piezoceramic slabs separated by an Al2 O3 -loaded epoxy and with Cr/Au electroplating on both surfaces. The array composite was backed by a lossy conductive epoxy which also served as the ground connection for the elements. The backed array was housed in a nonconductive Fig. 1. A cutaway drawing of the array showing all of the major design components (not to scale). ceramic frame which enabled the electrical connection of individual array elements to a flexible circuit via sputtered Cr/Au electrodes. A cylindrical acoustic lens was molded onto the surface of the array using an unloaded epoxy. This lens provides a fixed elevation focus and acoustical impedance matching between the composite to the load medium, as well as protects the fragile array elements from the environment. To provide RF shielding, the array was encased in a brass tube capped off with a stainless steel end piece. Only the active area of the array was exposed through a small opening in the end piece. The metal housing assembly surrounding the array was also connected to the coaxial cable bundle shield and, therefore, provided continuous RF shielding from the distal array face to the proximal connector box. The design, fabrication, and testing of the array was achieved using the following steps. A. 2-2 Composite Design and Fabrication There exist a number of techniques currently available for fabrication of piezo-polymer composites. The most common of these is the “dice and fill” technique whereby a mechanical dicing saw is used to cut kerfs into a piece of bulk piezoceramic, the kerfs being subsequently backfilled with epoxy [26]. Unfortunately this technique can be problematic when considering the small feature sizes required for very-high-frequency transducer operation. Other composite machining techniques available include laser ablation [18] and chemical etching [21]. Interdigital pair bonding [27] and more recently interdigital phase bonding [28] have been determined to be effective modified dicing methods for manufacturing high-volume fraction 2-2 or 1-3 composites at frequencies up to 80 MHz. The stacking and bonding of thin piezoceramic plates has also been shown to be an effective method for creating high-frequency 2-2 composites [12]. Using tape-cast PZT is a viable alternative to this “stack and bond” technique for production of large quantities of 2-2 composites at low cost [29]. This technique involves the printing of carbon black ink on thin sheets of green piezoceramic tape. The tape layers are then stacked to form the 2-2 structure, and the carbon is volatilized during heat treatment of the stack. The voids left by the removed carbon can then be backfilled with 226 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 epoxy under vacuum. Another technique that is suitable for large-scale production is termed the “lost mold” technique [30]. This technique involves the pressing of a piezoceramic paste into a mold, which is usually silicon and can be designed for various composite geometries. The mold is removed by chemical etching. After sintering the remaining composite posts, the voids left by the mold removal are backfilled with epoxy. It should be noted, however, that at present both the tape-cast and lost-mold techniques exhibit inferior piezoelectric properties when compared to composites made from bulk piezoceramics. Because ease of manufacture and use of bulk piezoceramic plates were critical design considerations when the 35-MHz array was developed, the “dice and fill” method was adopted to manufacture a 2-2 composite for this study. The 35-MHz composite was diced using a 13-µm hubbed nickel/diamond blade (Asahi Diamond Industrial Co., Ltd., Tokyo, Japan) and a Tcar 864-1 (Thermocarbon, Inc., Casselberry, FL) dicing saw. The polymer used to fill the kerfs was a mixture of Epo-Tek 301 (Epoxy Technologies, Billerica, MA) and 1-5 µm aluminum oxide (Al2 O3 ) particles (Buehler, Ltd., Lake Bluff, IL). A plate of Navy Type VI fine-grain piezoceramic (TRS600FGHD, TRS Ceramics, State College, PA) measuring 10×10×0.5 mm was selected and waxed to a glass carrier plate using a lowtemperature paraffin wax. The mechanical dicing saw was first used to cut kerfs in the ceramic 130 µm deep at a 50µm pitch. These first cuts were subsequently filled with the Al2 O3 -loaded epoxy (17% Al2 O3 by volume) using capillary action. A larger volume fraction of Al2 O3 was desired for this application because it would translate to a higher shear wave resonant frequency in the kerf. Unfortunately a higher percent Al2 O3 made the mixture too viscous for this application. The filler in the first set of kerfs was left to cure at room temperature in a dry nitrogen environment for 48 hours. The excess epoxy was then lapped off to expose the diced ceramic. It was important to lap at least 10–20 µm into the ceramic to expose the narrower part of the kerfs. The dicing saw was then aligned to the central portion of the exposed ceramic posts and a second set of cuts was made to produce the final 25-µm composite pitch. The second set of diced kerfs was subsequently filled with the same filler as before. After curing, excess epoxy was lapped off the top of the composite. The most uniform and smallest kerfs were produced at the deepest dicing depths (Fig. 2). Therefore the deepest section of the diced ceramic was chosen to produce the array composite. The composite was lapped to a final thickness of 50 µm after it was placed in the array housing. A scanning electron micrograph (SEM) image of a composite cross section before placement in the array housing is shown in Fig. 3. An average composite kerf width produced was 14 µm with a net piezoceramic volume fraction of 44%. Fig. 2. An SEM image of the diced ceramic before lapping it to the final composite thickness. The lighter portions of this image are the ceramic posts whereas the darker portions are the kerf filler. The dashed lines indicate the portion of the diced ceramic used in the 35-MHz array. Fig. 3. An SEM image of a lapped and backed 2-2 composite. The lighter portions of this image are the ceramic posts whereas the darker portions are the kerf filler. The irregular textured section under the composite is the silver epoxy backing layer. B. Finite Element Model Optimization of a Composite Array Element ever, a finite element model (FEM) was used to predict composite and array performance prior to fabrication. The relevant properties of the active and passive materials used in the model are listed in Tables II and III, respectively. A 2-D finite element model (PZFLEX, Wiedlinger Associates, Los Altos, CA) was first used to generate an electrical impedance magnitude and phase plot for a 1.5 × 0.3mm, 50-µm-thick virtual piece of fabricated composite resonating in air (Fig. 4). The series (fS ) and parallel (fP ) resonance frequencies from this model were used to determine the thickness mode coupling coefficient kt for the composite material based upon the following formula [31]: π fS π fP − fS kt = tan . (1) 2 fP 2 fP The finished composite was very fragile in its final state. It was therefore not tested prior to array fabrication. How- The average modeled electromechanical coupling coefficient for the composite was 0.64 and the first piezoelec- cannata et al.: 35-mhz piezo-composite ultrasound array 227 TABLE II Relevant Bulk Material Properties for the TRS600FGHD Piezoelectric Ceramic.1 Stiffness constants2 cE 11 (GPa) cE 33 cE 12 cE 13 cE 44 Dielectric constants Stress constants2 Other properties 140 2 εS 33 /εo 1350 e15 (C/m2 ) (GPa) 121 1700 e31 (C/m2 ) −5.7 (GPa) 75 2 εS 11 /εo T ε33 /εo 3670 e33 (C/m2 ) 25.8 (GPa) 90 εT 11 /εo 3830 (GPa) 22 20.24 Density2 (kg/m3 ) V33 7500 (m/s) 3966 k33 0.68 1 Courtesy 2 Used of TRS Ceramics, State College, PA. in FEM. TABLE III The Properties of the Passive Materials Used in the Array Design.1 Material Epo-Tek 301 (Lens) E-Solder 3022 (Backing layer) Epo-Tek 301 + 17% Al2 O3 (Kerf filler) 1 All Density (kg/m3 ) Vlong 2 (m/s) Attenuationlong (dB/mm) Vshear 2 (m/s) Attenuationshear (dB/mm) 1150 2675 13.5 1270 48 3200 1850 110 — — 1610 2710 15.9 1375 49 measurements were performed at 30 MHz [32]. and Vshear are the longitudinal and shear phase velocities, respectively. 2V long trically coupled lateral resonance attributed to the kerf occurred near 55 MHz. Also, based upon the series resonance peak frequency of approximately 41 MHz, the longitudinal velocity for the modeled composite geometry was 4100 m/s. Therefore, with the ceramic and epoxy densities listed in Tables II and III, respectively, the acoustical impedance for the modeled composite was calculated to be approximately 16.7 MRayls. It has been previously reported that finite element modeling can provide an accurate depiction of high-frequency array performance [32], as well as reduce the number of time-consuming prototype fabrication runs. For this study FEM was used as an aide to determining the optimal materials and geometries used in the array design so that the design goals in Table I could be met. For PZFLEX, as well as any other FEM, the accuracy of the model results are limited by the accuracy with which the properties of materials used in the design are measured. It would be ideal if the complete set of properties were measured over the entire bandwidth of the device. Unfortunately, at high frequencies it may be very difficult to characterize some materials due to the increase in attenuation associated with the elevated frequency. An example of this problem can be seen in Table III. It was not possible to characterize the shear wave velocity and attenuation of the lossy conductive backing material used in the current 35-MHz array design. Therefore, in order to effectively model the array using FEM, a number of assumptions were made to fill in these missing material properties. The shear wave attenuation was assumed to be four times that of the longi- tudinal wave attenuation. This approximation was loosely based upon the reported difference between longitudinal and shear attenuation for other epoxy mixtures measured at high frequencies [33]. An approximate shear velocity was calculated based upon the expected Poisson ratio (σ) and the measured longitudinal velocity using the following formula [34]: Vshear = Vlong 0.5 − σ . 1−σ (2) A Poisson ratio of 0.37 was assumed for this material, which is indicative of many rigid epoxies and plastics [34]. Therefore the shear velocity was assumed to be 45% that of the longitudinal velocity reported. A quarter-wavelength of coaxial cable can provide an improved impedance match between a transducer and the electronics if it possesses the proper impedance characteristics [35]. If properly designed and implemented, this transmission line coax can serve to increase bandwidth and sensitivity, as well as provide minor adjustments to the center frequency of the transducer. Cable impedance matching is well suited for use with devices operating at high frequencies (> 20 MHz), where the length of the coax can be approximately three meters or less. For this study, a high-impedance (> 50 ohm) micro-coaxial cable was used to match a high (> 200 Ω at resonance)-impedance array element to the 50-Ω send/receive electronics. This technique can also be applied to large aperture singleelement transducers, which typically display an electrical 228 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 TABLE IV Measured Properties for the 75-Ω Precision Interconnect Coaxial Cable.1 Property PI #171-0574-XX Characteristic impedance (Zo ) Propagation constant (γ) Propagation velocity (Vp ) Resistance/unit length (r) Capacitance/unit length (c) Conductance/unit length (g) Inductance/unit length (l) Attenuation/unit length 73.8 − 1.6i Ω 0.071 + 0.99i m−1 2.2 × 108 m/s 6.77 Ω/m 61 pF/m 674 µS/m 0.33 µH/m 0.61 dB/m 1 The cable was characterized at 35 MHz. The respective cable parameters are displayed with units of meters (m), ohms (Ω), henrys (H), farads (F), siemens (S), and decibels (dB). Fig. 4. Modeled electrical impedance magnitude (solid line) and phase angle (dashed line) for a 1.5-mm × 0.3-mm × 0.05-mm piece of composite resonating in air. impedance of less than 50 Ω, by using a low impedance coax [36]. In order to utilize this coax in the finite element model the cable was analyzed using the well-known transmission line equations. The first step was to characterize the impedance Zo and propagation constant γ for the coax at 35 MHz based upon the following formula for a coax length x [37]: Zx = Zo [Zload + Zo T anh(γx)] , [Zo + Zload T anh(γx)] (3) where Zload represents the electrical impedance of the transducer and Zx is the transformed coaxial impedance measured on the system end of the cable. The values for Zo and γ were obtained by measuring the complex open and short-circuit impedance for a sample cable on an HP 4194 Impedance Analyzer (Agilent Technologies, Englewood, CO). A given cable length x was prepared for measurement, and the complex transformed impedance was recorded for both the short-circuit and the open-circuit Zload values. The two measured values for Zx and (3) were then used to solve for Zo and γ. The distributed network representation for the 75-Ω micro-coaxial cable (#171-0574-XX, Precision Interconnect, Portland, OR) used in the array design was also solved [38]. The resultant per-unit-length values of cable propagation velocity (v), series resistance (r), series inductance (l), shunt capacitance (c), shunt conductance (g), and attenuation (α) were recorded and listed in Table IV. Because of the moderately low composite acoustic impedance (16.7 MRayls), only a single matching layer was used in the array design. Based upon the formula by DeSilets et al. [38] for broadband transducer operation, the ideal matching layer impedance was determined to be 3.35 MRayls. Therefore the array lens epoxy (Epo-Tek 301, Z = 3.1 MRayls) was chosen and assumed to be a single λ/4 matching layer in the 2-D finite element model. From the FEM the ideal matching layer thickness was determined to be 19 µm and the ideal micro-coaxial cable length was 1.2 m. The electrical impedance of a modeled single array element before and after adding the coaxial cable is displayed in Fig. 5. The model was finally used to predict the pulse/echo response from a flat plate reflector placed at 9.5 mm away from the array face. The echo response, shown in Fig. 6, displays a center frequency of 34.8 MHz and −6 dB bandwidth of 53%. Once the bandwidth requirements for the array element in the finite element model were met, the next developmental step was to fabricate a full 64-element array module as shown previously in Fig. 1. C. Array Module Fabrication The conductive backing material, E-solder 3022 (Von Roll Isola, Inc., New Haven, CT), was cast on a lapped and electroded plate of 2-2 composite material using a 2,000g centripetal force for ten minutes. This process separated the epoxy into loaded and unloaded layers and served to compact the silver flakes up against the composite plate. The backed composite was cured in a dry nitrogen environment for 24 hours at room temperature and then postcured at 40◦ C and 50◦ C for 10 hours each. The elevated temperature post-cure increased the glass transition temperature of the epoxy in order to provide a more rigid substrate for the latter array fabrication steps. After the backing was fully cured, it was lapped down to a thickness of approximately 3 mm in order to remove the unloaded epoxy layer and to ensure that the silver-loaded portion was parallel to the composite plate. In this state the backing epoxy displayed an electrical resistance of 0.6 Ω/mm. The backed composite was then diced to a width of 3 mm and length of approximately 3.7 mm, to provide at least five extra elements on either side of the 64-element array. The backed composite was then cast into a rigid ceramic frame (machinable glass-mica ceramic, McMasterCarr Supply Company, Cleveland, OH) using Epo-Tek 301 epoxy. This rigid frame was used to provide support to the composite, as well as serve as a nonconductive barrier surrounding the composite that could be used as a surface for electrical interconnect to individual array elements [13]. The framed composite was allowed to cure at cannata et al.: 35-mhz piezo-composite ultrasound array 229 Fig. 6. The FEM pulse-echo response for a single 35-MHz array element. The axes on the top and right of the figure refer to the frequency spectrum (dashed line). Also displayed are the calculated center frequency (CF), the −6 dB bandwidth (BW), and the −20 dB pulse length (PL) for the response. ing the radius of curvature of the lens using the following formula [39]: f≈ Fig. 5. Modeled electrical impedance magnitude (solid line) and phase angle (dashed line) for a single composite array element before (top) and after (bottom) coaxial cable impedance matching. room temperature for 48 hours in a dry nitrogen environment, and then post-cured at 40◦ C and then 50◦ C for 24 hours each. The composite and frame were then lapped down by 10 µm in thickness to ensure that the composite posts were 50-µm thick and that the epoxy bond line between composite and frame was flat and contiguous. The top and side surfaces of the framed composite were then cleaned and sputtered with a total of 4500Å Cr/Au. Element separation was achieved by mechanically scratchdicing the top electrode layer over the composite kerfs and ceramic frame with the prescribed 50-µm spacing using the 13-µm diamond/nickel hubbed blade previously described. The opposing two electroplated sides of the ceramic frame were also scratched-diced to separate individual element electrodes. For this a 50-µm blade was used to completely remove a 50-µm width of electroplating, leaving connections for either the odd or even element electrodes on one side of the ceramic frame spaced at a 100-µm pitch (Fig. 1). The electroplated array was then prepared for casting of the epoxy lens. The epoxy lens was cast onto the array with a polished quartz cylindrical rod (ISP Optics, Irvington, NY) as a mold. The desired focal length f was achieved by specify- δ 1− c2 , c1 (4) where δ is the radius of curvature of the lens, c1 is the sound velocity in the lens material, and c2 is the sound velocity in the medium. A quartz rod with a radius approximately equal to 4.34 mm was chosen to focus the array at a range of 10 mm. The quartz rod was sprayed with a mold release agent (Ease Release 200, Mann Formulated Prods., Gillete, NJ) to ease in the epoxy post-cure removal process. As noted previously, the apex of the lens was designed to be approximately λ/4 thick at the center of the elevation aperture to aid in acoustically matching the transducer to the load medium. To ensure this, the cylindrical rod was centered over the elevation aperture and offset by 19 µm using shims. The lens epoxy, EpoTek 301, was degassed and filtered to remove bubbles and impurities prior to application. A bolus of the epoxy was allowed to wick between the cylindrical rod and array assembly. Surface tension held the liquid epoxy in place during curing. The lens was allowed to cure for two days in a dry nitrogen environment before post-curing at 40◦ C for 4 hours. After curing, the edges of the lens above the ceramic frame were lapped parallel to the array elements. D. Array Interconnect, Housing, and Termination The connection of individual coaxial cables to array elements was accomplished through the use of two in- 230 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 Fig. 7. A picture of the finished 35-MHz array. The bottom right side of this image shows an enlarged view of the front of the array. The long axis of the hole cut in the stainless steel nosepiece is along the azimuth direction. termediate flexible circuits incorporating 5-µm-thick Au traces on a 50-µm-thick polyimide surface (Dynamic Research Corp., Wilmington, MA). The coaxial cable assembly (#171-0574-XX, Precision Interconnect, Portland, OR) was attached to the flexible circuit by the cable manufacturer using a proprietary low-temperature solder process. The flexible circuit was connected to the framed array by carefully aligning and bonding the flex circuit traces to the electrodes on the two sides of the framed array. The epoxy used for this process was Epo-Tek 301. The newly interconnected array assembly was allowed to cure for 48 hours at room temperature in a dry nitrogen environment before further processing. A grounding wire was connected from the conductive epoxy array backing to the cable assembly shield. The array assembly was housed in a five-part cylindrical metal and plastic housing. Individual coaxial cables were terminated into an aluminum enclosure housing 64 individual SMB connectors. This ensured satisfactory electrical isolation between each coaxial cable. A photograph of the completed array is shown in Fig. 7. E. Array Characterization The ultimate indication of ultrasonic array performance is its ability to form an image. However, image quality depends not only on the array but also on the system electronics and signal processing algorithms. Thus it is difficult to compare different arrays based solely on image analysis. Therefore, several standard non-imaging tests were first performed on the 35-MHz array so that it could be compared to arrays built prior to this study. The electrical impedance magnitude and phase angle for each element were measured using a HP4194 impedance analyzer with the z-probe attachment. For this test the array face was placed in a water bath, and the electrical impedance magnitude and phase angle were measured over the array pass-band. The pulse-echo response test is the most common test performed on ultrasonic single-element and array transducers. This test was used to measure and provide a relative comparison of array element center frequency, bandwidth, focus, pulse length, and sensitivity. A Panametrics 5900PR pulser/receiver (Panametrics, Inc., Waltham, MA) was used to excite each element using the 1-µJ, 50-Ω settings with 20 dB total gain on receive. The array was positioned in a degassed/deionized water bath opposite a polished stainless steel plate reflector. The time delay observed on the oscilloscope (Lecroy LC534, Chestnut Ridge, NY) between excitation and the largest first echo response was recorded to determine elevation focal length. The fast Fourier transform (FFT) function on the oscilloscope was used to determine the frequency response of this RF echo. The two −6 dB points of this power spectrum defined the upper and lower band edges of the signal, and the mean of these frequencies was recorded as the center frequency. The percent bandwidth was calculated by dividing the frequency difference between the two −6 dB points by the center frequency. The amplitude of the echo signal was recorded for relative element sensitivity comparisons. The pulse length of the echo waveform was recorded as the length of time between the first and last points where the signal was −20 dB relative to the peak. The level of electrical and acoustical separation between elements was determined by measuring crosstalk. For this test the array was positioned in a degassed/deionized water bath opposite an absorptive piece of rubber. A Sony/Tektronix AFG2020 function generator (Tektronix, Inc., Beaverton, OR), set in burst mode, was used to excite a representative element with the applied voltage measured as a reference. Voltages across the three nearest elements were measured and compared to this reference voltage. This process was repeated at discrete frequencies over the array pass-band. The azimuthal one-way directivity was measured by rotating a representative element around an axis along its length and center. A needle hydrophone (Precision Acoustics, Dorchester, UK), placed at the elevation focus, was used to acquire the amplitude of the time-domain response at discrete angular positions. The Field II program was used to simulate the directivity of a single array element [40], and to estimate the effective element width by matching a theoretical directivity curve to the measured values. Insertion loss was measured by exciting a representative array element with a 35-MHz voltage burst, and receiving the reflected echo from a polished steel reflector placed at the elevation focus. The receive power across a 50-Ω load was referenced to the source power delivered to a 50-Ω reference load and expressed in decibels. The measured value was then corrected for loss due to diffraction in the azimuth direction [41], attenuation in the water bath (2.2 × 10−4 dB/mm-MHz2 ) [42], and reflection from the steel target (0.6 dB). For the final performance test, the array was used to image a custom-made wire target phantom composed of five evenly spaced 20-µm-diameter tungsten wires (Cali- cannata et al.: 35-mhz piezo-composite ultrasound array 231 fornia Fine Wire Company, Grover Beach, CA). There are currently two 16-channel analog [43] and digital [44] highfrequency beamformers available to produce real-time images at center frequencies up to 40 MHz. Unfortunately, given the current geometry of the 35-MHz array, it was determined that 16 transmit and receive channels would not provide adequate lateral resolution for this study. Therefore a synthetic aperture reconstruction algorithm was used to form the image of the wire target phantom. The 1.2-λ pitch is problematic for synthetic aperture imaging because the first-order grating lobe appears at one-half the angular location observed in a conventional beamforming system [45]. For the 35-MHz array without beam steering, grating lobes are expected to occur at 57◦ and 28.5◦ for conventional and synthetic systems, respectively. To limit the effect of these secondary lobes, array elements were only used for reconstruction if they fell within a ±9◦ acceptance angle for a point in the formed image. Therefore, the aperture size used for reconstruction was varied dynamically throughout the image to produce a consistent lateral resolution. Backprojection using a monostatic approach was accomplished by delaying and summing the time-domain contributions to each pixel according to the following formula [13]: P (xi , zi ) = 2 we Re t − ∗ (xe − xo )2 + zo2 , c e=1 TABLE V Measured Properties for the 64-Element Composite Array. Property Value Number of elements Number of open elements Number of shorted elements Average center frequency Highest/lowest center frequency Average bandwidth (−6 dB) Highest/lowest bandwidth Average sensitivity Highest/lowest sensitivity −20 dB pulse length∗ Electrical impedance magnitude (at 35 MHz)∗ Electrical impedance phase angle (at 35 MHz)∗ Focal point∗ Insertion loss∗ 64 1 0 35.3 MHz 36.5 MHz/34.2 MHz 55% 62%/49% 403 mV 444 mV/360 mV 94 ns ∗ Measured 31 ohms −48 degrees 9.5 mm 22.8 dB on a representative array element. N (5) where xi , zi is the location of the pixel in the image plane, e is the index of the element over the range of 1 to N (number of elements), we is the apodization function, Re is the time-domain response, t is the time, c is the propagation velocity, xo , zo is the location of the point in object space, and xe is the position of the array element. The individual time-domain responses were acquired by manually connecting each of the 64 array elements to a Panametrics 5900 pulser-receiver using the same settings as described for the pulse-echo test setup. Image reconstruction was accomplished off-line using programs written in Matlab [25]. III. Results and Discussion All of the individual element test results for the completed array are summarized in Table V. The array displayed only one open element and no shorted elements. Fig. 8 shows the electrical impedance magnitude and phase angle for a typical array element. The general trend of this curve matches that of the FEM impedance plot shown in Fig. 5. However, the resonance peak seen in the FEM plot near 40 MHz, which corresponds to the piezocomposite parallel resonance, is not visible in the measured impedance plot. The likely cause of this discrepancy is a higher-than-desired electrical trace resistance between an array element and a coaxial cable. Exploring the FEM further verified that increasing element trace resistance would produce the measured result. According to the model, the Fig. 8. Measured electrical impedance magnitude (solid line) and phase angle (dashed line) for a representative composite array element. consequence of this is a slight reduction of pulse sensitivity and bandwidth. A comparison of the pulse-echo responses for a typical and the worst (subjectively judged by the authors) connected array element is shown in Fig. 9. The array displayed an average center frequency of 35.3 MHz with an average −6 dB bandwidth of 55%. Both of these average measurements were consistent with the initial requirements for the array design and the finite element model. The measured −20 dB pulse length for a typical element of 94 ns also met the initial specifications for the array. However, this recorded pulse length is slightly longer than expected from the FEM. This error between model and experiment can be attributed to the observed additional resistance in the element traces, as well as the expected errors due to the aforementioned assumptions used in the model. A larger increase in positive trace resistance is also the most likely cause of the additional reduction of sensi- 232 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 Fig. 10. The variation of center frequency across the array. Fig. 11. The variation of sensitivity and bandwidth across the array. Fig. 9. Measured pulse-echo response for two 35-MHz array elements. The waveform on the top (element #64) was deemed typical whereas the one on the bottom (element #24) was judged to be the worst. The axes on the top and right of the figure refer to the frequency spectrum (dashed line). Also displayed are the calculated center frequency (CF), the −6 dB bandwidth (BW), the −20 dB pulse length (PL), and peak-to-peak voltage (Vpp ). tivity and pulse shape recorded for the worst active element. Overall the performance of the array was very consistent across the aperture, as shown in Figs. 10 and 11. Crosstalk measurements indicated satisfactory but not ideal element-to-element isolation. The measured crosstalk for the array is shown in Fig. 12. Near the center frequency of the array the measured crosstalk was <−24 dB. There are two likely possibilities for this higher-than-desired crosstalk: acoustic or mechanical cross-coupling between elements in the 2-2 composite array structure through the backing, kerf filler and lens, and/or electrical crosscoupling caused by a competition between the high array Fig. 12. Measured crosstalk for the array. cannata et al.: 35-mhz piezo-composite ultrasound array 233 Fig. 13. Measured and modeled one-way directivity for a single-array element. This figure shows three sets of hydrophone measurements taken at a range of 10 mm, and the modeled result also taken at a range of 10 mm using a 70-µm element width. element impedance and the impedance between successive electrodes. Although a combination of the two sources is likely, coupling was observed to be instantaneous, indicating that electrical crosstalk was dominant. As a comparison, Guess et al. [46] observed combined crosstalk levels exceeding −24 dB for adjacent elements on a similarly constructed 3.0-MHz array. However, that study showed that, while high crosstalk levels were observed for nearest neighbors, crosstalk between next nearest neighbor elements was much lower at less than −45 dB over the passband. This was not the case for the 35-MHz array design. In fact, the crosstalk magnitude for the next nearest neighbor element, which had a flex circuit connection next to the source element, was comparable to the magnitude observed for the nearest neighbor. This observation further reinforces the notion that the major source of crosstalk in the fabricated array was electrical in nature. In the future this issue could be overcome by improving the electrical impedance characteristics of an array element via reduced electrode trace resistance, and/or by increasing element area or dielectric permittivity of the piezo-ceramic used in the design. The measured one-way directivity pattern for a representative array element is shown in Fig. 13. Three data sets were taken for comparison. The higher-thandesired crosstalk observed explains why the effective element width (70 µm) was 40% larger than the array pitch. A similar result was observed by Felix et al. for a 3.5-MHz array [47]. The null in the peak of these patterns can also be attributed to crosstalk effects [41]. The measured insertion loss for a representative array element was 50.3 dB. Correction for diffraction in the azimuth direction was achieved using the directivity pattern for a 70-µm element. After compensation for attenuation caused by the water and reflection from the target, an estimated insertion loss of −22.8 dB was obtained. This Fig. 14. Synthetic aperture image of a wire phantom reconstructed using a half-angle of 9◦ and no apodization or thresholding. The dynamic range of the image is 40 dB and the display uses a linear gray scale for mapping. value was comparable to a similarly built, high-frequency lens-focused transducer [36], but was 7.8 dB higher than reported by Ritter et al. [13] for an optimized 30-MHz 22 composite array with two acoustic matching layers and lens. However, given the simplicity of the 35-MHz array design, lower element sensitivity is a compromise in this more mass-producible design. An image of the five-wire test phantom is shown in Fig. 14 using a linear gray scale and 40-dB dynamic range. No apodization or thresholding was implemented during reconstruction. Plots of the axial and lateral line spread functions for the center wire are shown in Fig. 15. The measured FWHM (full-width half-maximum) resolutions were 42 µm and 95 µm for the axial and lateral directions, respectively. These measurements correlate well with the resolutions of 40 µm axially and 95 µm laterally predicted from a Field II simulation and offer a slight improvement 234 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 <−30 dB crosstalk, all of the initial array design goals were met: a center frequency near 35 MHz, > 50% bandwidth, and a pulse length of less than 120 ns. A wire phantom image, reconstructed using a synthetic aperture technique, demonstrated resolutions of 95 µm or less with minimal artifacts. The results indicate that this array design, when coupled with an adequate high-frequency beamformer, will be suitable for clinical applications. Assessment of the array on animals and human patients is anticipated in the near future. References Fig. 15. Axial (top) and lateral (bottom) line spread functions for the center wire of the phantom. laterally and significant improvement axially over the resolutions reported by Ritter et al. [13] for the 30-MHz composite array. The phantom image displayed low-level sidelobes resulting from the reconstruction algorithm and the limited number of elements used for reconstruction. These sidelobes could be reduced in amplitude by using apodization; however, this comes at a cost of increased main lobe width [48]. IV. Conclusions This paper describes the development and fabrication of a 35-MHz linear array made using mechanically diced 2-2 composite elements. With the exception of the desired [1] G. R. Lockwood, D. H. Turnbull, D. A. Christopher, and F. S. Foster, “Beyond 30 MHz: Applications of high frequency ultrasonic imaging,” IEEE Eng. Med. Biol., vol. 15, pp. 60–71, 1996. [2] F. S. Foster, C. J. Pavlin, G. R. Lockwood, L. K. Ryan, K. A. Harasiewicz, L. Berube, and A. M. Rauth, “Principles and applications of ultrasonic backscatter microscopy,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 40, pp. 608–616, 1993. [3] D. J. Coleman, R. H. Silverman, A. Chabi, M. J. Rondeau, K. K. Shung, J. Cannata, and H. Lincoff, “High-resolution ultrasonic imaging of the posterior segment,” Ophthalmology, vol. 111, no. 7, pp. 1344–1351, 2004. [4] D. H. Turnbull, B. G. Starkoski, K. A. Harasiewicz, J. L. Semple, L. From, A. K. Gupta, D. N. Sauder, and F. S. Foster, “A 40–100 MHz B-scan ultrasound backscatter microscope for skin imaging,” Ultrasound Med. Biol., vol. 21, no. 1, pp. 79–88, 1995. [5] C. Passman and H. Ermert, “A 100 MHz ultrasound imaging system for dermatologic and ophthalmologic diagnostics,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 43, no. 4, pp. 545–552, 1996. [6] D. H. Turnbull, “In utero ultrasound backscatter microscopy of early stage mouse embryos,” Comput. Med. Imaging Graph., vol. 23, no. 1, pp. 25–31, 1999. [7] F. S. Foster, M. Y. Zhang, Y. Q. Zhou, G. Liu, J. Mehi, E. Cherin, K. A. Harasiewicz, B. G. Starkoski, L. Zan, D. A. Knapik, and S. L. Adamson, “A new ultrasound instrument for in vivo microimaging of mice,” Ultrasound Med. Biol., vol. 28, no. 9, pp. 1165–1172, 2002. [8] C. S. DeSilets, “Transducer arrays suitable for acoustic imaging,” Ph.D. dissertation, Stanford University, Stanford, CA, May 1978. [9] M. Lethiecq, G. Feuillard, L. Ratsimandresy, A. Nguyen-Dinh, L. Pardo, J. Ricote, B. Andersen, and C. Millar, “Miniature high frequency array transducers based on new fine grain ceramics,” in Proc. IEEE Ultrason. Symp., 1994, pp. 1009–1013. [10] A. Nguyen-Dinh, L. Ratsimandresy, P. Mauchamp, R. Dufait, A. Flesch, and M. Lethiecq, “High frequency piezo-composite transducer array designed for ultrasound scanning applications,” in Proc. IEEE Ultrason. Symp., 1996, pp. 943–947. [11] S. Michau, P. Mauchamp, and R. Dufait, “Piezocomposite 30 MHz linear array for medical imaging: Design challenges and performances evaluation of a 128 element array,” in Proc. IEEE Ultrason. Symp., 2004, pp. 898–901. [12] T. A. Ritter, E. Gerber, K. K. Shung, and T. R. Shrout, “Method for manufacture of high frequency ultrasound transducers,” U.S. Patent 6 183 578, Feb. 6, 2001. [13] T. A. Ritter, T. R. Shrout, T. Tutwiler, and K. K. Shung, “A 30-MHz composite ultrasound array for medical imaging applications,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 49, no. 2, pp. 217–230, 2002. [14] P. A. Payne, J. V. Hatfield, A. D. Armitage, Q. X. Chen, P. J. Hicks, and N. Scales, “Integrated ultrasound transducers,” in Proc. IEEE Ultrason. Symp., 1994, pp. 1523–1526. [15] S. J. Carey, C. M. Gregory, M. P. Brewen, J. M. Birch, S. Ng, and J. Hatfield, “PVDF array characterization for high frequency ultrasonic imaging,” in Proc. IEEE Ultrason. Symp., 2004, pp. 1930–1933. [16] S. J. Carey, C. M. Gregory, and J. V. Hatfield, “Electronics for high impedance ultrasonic transducers,” in World Congress of Ultrasound 2003, Paris, France, 2003, pp. 263–266. cannata et al.: 35-mhz piezo-composite ultrasound array [17] C. E. Morton and G. R. Lockwood, “Evaluation of kerfless linear arrays,” in Proc. IEEE Ultrason. Symp., 2002, pp. 1257–1260. [18] M. Lukacs, M. Sayer, and F. S. Foster, “Single-element and linear array transducer design for ultrasound biomicroscopy,” in Proc. Med Imaging: Ultrason. Transd. Eng., vol. 3341, 1998, pp. 272– 282. [19] F. Levassort, L. Pascal, T. H. Hue, J. Holc, T. Bove, M. Kosec, and M. Lethiecq, “High performance piezoelectric films on substrates for high frequency imaging,” in Proc. IEEE Ultrason. Symp., 2001, pp. 1035–1038. [20] R. Kline-Schoder, D. Kynor, M. Jaeger, A. Windor, and C. DeSilets, “Physical vapor deposition of multi-layered PZT films for ultrasonic transducer fabrication,” in Proc. Med. Imaging: Ultrason. Transd. Eng., vol. 3664, 1999, pp. 221–228. [21] Y. Ito, K. Kushida, K. Sugawara, and H. Takeuchi, “A 100 MHz ultrasonic transducer array using ZnO thin films,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 42, no. 2, pp. 316–324, 1995. [22] T. Buma, M. Spicar, and M. O’Donnell, “Thermoelastic expansion vs. piezoelectricity of high-frequency, 2D arrays,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 50, no. 8, pp. 1065–1068, 2003. [23] O. Oralkan, S. Hansen, B. Bayram, G. G. Yaralıoǧlu, A. S. Ergun, and B. Khuri-Yakub, “High frequency CMUT arrays for high-resolution medical imaging,” in Proc. IEEE Ultrason. Symp., 2004, pp. 399–402. [24] J. R. Talman and G. R. Lockwood, “Evaluation of the radiation pattern of a split aperture linear phased array for high frequency imaging,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 47, no. 1, pp. 117–124, 2000. [25] T. A. Ritter, T. R. Shrout, and K. K. Shung, “A high frequency ultrasound array incorporating an actuator,” in Proc. Med. Imaging: Ultrason. Transducer Eng., vol. 4325, 2001, pp. 36–46. [26] H. P. Savakas, K. A. Klicker, and R. E. Newnham, “PZTepoxy piezoelectric transducers: A simplified fabrication procedure,” Mater. Res. Bull., vol. 16, no. 6, pp. 677–680, 1981. [27] R. Liu, K. A. Harasiewicz, and F. S. Foster, “Interdigital pair bonding for high frequency (20–50 MHz) ultrasonic composite transducers,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 48, no. 1, pp. 299–306, 2001. [28] J. Yin, M. Lukacs, K. Harasiewicz, and F. S. Foster, “Ultra-fine piezoelectric composites for high frequency ultrasonic transducers,” in Proc. IEEE Ultrason. Symp., 2004, pp. 1962–1965. [29] W. Hackenberger, S. Kwon, P. Rehrig, K. Snook, S. Rhee, and X. Geng, “2-2 PZT-polymer composites for high frequency (>20 MHz) ultrasound transducers,” in Proc. IEEE Ultrason. Symp., 2002, pp. 1253–1256. [30] S. Cochran, A. Abrar, K. J. Fox, D. Zhang, T. W. Button, B. Su, C. Meggs, and N. Porch, “Net-shape ceramic processing as a route to ultrafine scale 1-3 connectivity piezoelectric ceramic-polymer composite transducers,” in Proc. IEEE Ultrason. Symp., 2004, pp. 1682–1685. [31] IEEE Standard on Piezoelectricity, ANSI/IEEE Standard 1761987, New York: IEEE, Inc., 1988. [32] J. M. Cannata and K. K. Shung, “A comparison of model and experiment for a high frequency (35 MHz) linear ultrasonic array,” in Proc. IEEE Ultrason. Symp., 2003, pp. 1658–1662. [33] H. Wang, T. A. Ritter, W. Cao, and K. K. Shung, “High frequency properties of passive materials for ultrasonic transducers,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 48, no. 1, pp. 78–84, 2001. [34] G. S. Kino, Acoustic Waves: Devices, Imaging, and Analog Signal Processing. Englewood Clifs, NJ: Prentice-Hall, 1987. [35] R. E. McKeighen, “Design guidelines for medical ultrasonic arrays,” in Proc. Med. Imaging: Ultrason. Transd. Eng., vol. 3341, 1998, pp. 2–18. [36] J. M. Cannata, T. A. Ritter, W.-H. Chen, R. H. Silverman, and K. K. Shung, “Design of efficient, broadband single-element (20–80 MHz) ultrasonic transducers for medical imaging applications,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 50, no. 11, pp. 1548–1557, 2003. [37] A. P. Albrecht, “Transmission lines,” in Electronic Designer’s Handbook. L. J. Giacoletto, Ed. New York: McGraw-Hill, 1977, pp. 8.1–8.78. 235 [38] C. S. DeSilets, J. D. Fraser, and G. S. Kino, “Design of efficient broadband piezoelectric transducers,” IEEE Trans. Sonics Ultrason., vol. 25, no. 3, pp. 115–125, 1978. [39] K. K. Shung, M. B. Smith, and B. M. W. Tsui, Principles of Medical Imaging. San Diego, CA: Academic, 1992. [40] J. Jensen, “Field: A program for simulating ultrasound systems,” Med. Biol. Eng. Comp., vol. 34, no. 1, pp. 351–353, 1996. [41] A. R. Selfridge, “The design and fabrication of ultrasonic transducers and transducer arrays,” Ph.D. dissertation, Stanford University, Stanford, CA, July 1983. [42] G. R. Lockwood, D. H. Turnbull, and F. S. Foster, “Fabrication of high frequency spherically shaped ceramic transducers,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 41, no. 2, pp. 231–235, 1994. [43] Q. Wu, R. L. Tutwiler, and K. K. Shung, “Design of an analog beamformer for very high-frequency ultrasound transducer arrays,” in Proc. Med. Imaging: Ultrason. Transd. Eng., vol. 3982, 2000, pp. 142–149. [44] C.-H. Hu, K. A. Snook, X.-C. Xu, J. T. Yen, K. K. Shung, and P.-J. Cao, “FPGA based digital high frequency beamformers for arrays,” in Proc. IEEE Ultrason. Symp., 2004, pp. 1347–1350. [45] P. D. Corl, P. M. Grant, and G. S. Kino, “A digital synthetic focus acoustic imaging system for NDE,” in Proc. IEEE Ultrason. Symp., 1978, pp. 263–266. [46] J. F. Guess, C. G. Oakley, S. J. Douglas, and R. D. Morgan, “Cross-talk paths in array transducers,” in Proc. IEEE Ultrason. Symp., 1995, pp. 1279–1282. [47] N. Felix, D. Certon, E. Lacaze, M. Lethiecq, and F. Patat, “Experimental investigation of cross-coupling and its influence on the elementary radiation pattern in 1-D ultrasonic arrays,” in Proc. IEEE Ultrason. Symp., 1999, pp. 1053–1056. [48] C. H. Frazier and W. D. O’Brien, “Synthetic aperture techniques with a virtual source element,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 45, no. 1, pp. 196–207, 1998. Jonathan M. Cannata (S’01–M’04) was born in Carson, CA on August 4, 1975. He received his B.S. degree in Bioengineering from the University of California at San Diego in 1998, and his M.S. and Ph.D. degrees in Bioengineering from the Pennsylvania State University, University Park, PA, in 2000 and 2004, respectively. Since 2001 Dr. Cannata has served as the resource manager for the NIH (National Institutes of Health) Resource Center for Medical Ultrasonic Transducer Technology at Penn State University (2001 to 2002) and currently at USC (University of Southern California). In 2005 he was appointed the title of Research Assistant Professor of Biomedical Engineering at USC. His current research interests include the design, modeling, and fabrication of high frequency single element ultrasonic transducers and transducer arrays for medical imaging applications. Dr. Cannata is a member of the Institute of Electrical and Electronics Engineers (IEEE). Jay A. Williams was born on June 14, 1955, in Bellefonte, PA. He graduated from State College Area School District of PA in 1973 and audited courses in Physics, Computer Science, Mechanical Engineering, Architecture, and Business Management at the Pennsylvania State University, 1975–1977. He had been in industry for over twenty-five years in technical fields such as Mass Spectrometry, Microwave Telecommunication, Liquid Chromatography, Digital Electronics, Ultrasound, and Information Technology. From 1990 until 2001, he worked in ultrasonics at Blatek, Inc., eight-and-a-half years in engineering and two-and-a-half years in management, including five years as Network Administrator and two years as Quality System Manager in charge of establishing their ISO9001/CGMP compliant quality system. 236 ieee transactions on ultrasonics, ferroelectrics, and frequency control, vol. 53, no. 1, january 2006 Mr. Williams joined the NIH Resource Center for Medical Ultrasonic Transducer Technology in March, 2002 as Research Technologist, just prior to their move to the University of Southern California in August of that year. He has also served as the webmaster for the Resource Center website http://bme.usc.edu/UTRC since the move to Los Angeles, CA. He has now worked in the ultrasound field for over fourteen years. His research interests are in novel techniques for high-frequency transducer/array design and fabrication, and the role information technology can play in improving the capabilities and accessibility of technology. Qifa Zhou received his Ph.D. degree from the Department of Electronic Materials and Engineering at Xi’an Jiaotong University, Xi’an, China in 1993. He is currently a Research Assistant Professor at the NIH Resource on Medical Ultrasonic Transducer Technology (Los Angeles, CA) and the Department of Biomedical Engineering at University of Southern California, Los Angeles, CA. Before joining USC in 2002, he worked in the Department of Physics at Zhongshan University of China at Guang Zhou, the Department of Applied Physics at Hong Kong Polytechnic University at Kowloon, and the Materials Research Laboratory at Pennsylvania State University, University Park, PA. His current research interests include the development of ferroelectric thin films, MEMS technology, modeling and fabrication of high frequency ultrasound transducers and arrays for medical imaging applications. He has published more than 70 papers in this area. He is a member of the Materials Research Society. Timothy Ritter was born in Harrisburg, PA on February 19, 1965. He earned his B.S. degree in Mechanical Engineering from Penn State University in 1987, his M.S. degree in Physics from the University of Connecticut in 1991, and his Ph.D. degree in Bioengineering from Penn State University in 2000. From 1998 until 2001 he served as manager of the NIH Resource Center for Medical Ultrasonic Transducer Technology. In 2000 he was also appointed an Assistant Professor of Bioengineering at Penn State. He accepted a commission in the U.S. Air Force in 2001 and was assigned to Keesler Air Force Base following completion of Officer Training School. His current assignment is in therapeutic and diagnostic medical physics. He is a member of the American Association of Physicists in Medicine and the Health Physics Society. K. Kirk Shung (S’73–M’75–SM’89–F’93) obtained a B.S. degree in electrical engineering from Cheng-Kung University in Taiwan at Tainan in 1968, a M.S. degree in electrical engineering from University of Missouri, Columbia, MO in 1970 and a Ph.D. degree in electrical engineering from University of Washington, Seattle, WA, in 1975. He did postdoctoral research at Providence Medical Center in Seattle, WA, for one year before being appointed a research bioengineer holding a joint appointment at the Institute of Applied Physiology and medicine, Seattle, WA. He became an assistant professor at the Bioengineering Program, Pennsylvania State University, University Park, PA in 1979 was promoted to professor in 1989. He was a Distinguished Professor of Bioengineering at Penn State until September 1, 2002 when he joined the Department of Biomedical Engineering, University of Southern California, Los Angeles, CA, as a professor. He has been the director of NIH Resource on Medical Ultrasonic Transducer Technology since 1997. Dr. Shung is a fellow of the IEEE, the Acoustical Society of America and the American Institute of Ultrasound in Medicine. He is a founding fellow of the American Institute of Medical and Biological Engineering. He has served for two terms as a member of the NIH Diagnostic Radiology Study Section. He received the IEEE Engineering in Medicine and Biology Society early career award in 1985 and coauthored a best paper published in IEEE Transactions on UFFC in 2000. He is the distinguished lecturer for the IEEE UFFC society for 2002–2003. He was elected an outstanding alumnus of Cheng-Kung University in 2001. Dr. Shung has published more than 160 papers and book chapters. He is the author of a textbook “Principles of Medical Imaging” published by Academic Press in 1992. He co-edited a book “Ultrasonic Scattering by Biological Tissues” published by CRC Press in 1993. Dr. Shung’s research interest is in ultrasonic transducers, high frequency ultrasonic imaging, and ultrasonic scattering in tissues.