Chapter 5: Transient and Frequency responses of LTI systems
advertisement

Chapter 5: Transient and Frequency
responses of LTI systems
Spring 2009/10
Lecture: Tim Woo
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 1
Where we are
Continuous-time
Hardware
Implementation
Discrete-time
Closed-loop
Systems
Open-loop
Systems
State-space
model
Mapping
Differential
equations
System
Characteristics
System
Responses
Open-loop
Systems
State-space
model
Difference
equations
CTFT
DTFT
Laplace
Transform
z-Transform
Will be covered if available Done in 211 To be covered
ELEC 215: Tim Woo
Hardware
Implementation
Closed-loop
Systems
Spring 2009/10
In progress
System
Characteristics
System
Responses
Done
Chapter 5 - 2
Expected Outcome
• In this chapter, you will be able to
– Analysis the system performance with the use of transient and
frequency response tools
•
•
•
•
Impulse response
Step response
Ramp response
Bode plot
– Evaluate the transient and frequency responses of the first- and
second-order continuous-time and discrete-time LTI systems
– Understand the specification of filter in the filter design
– Categories different linear-phase digital filters
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 3
Outline
•
Textbook:
– Section 6.2 The Magnitude-phase representation of the frequency
response of LTI systems
– Section 6.3 Time-domain properties of an ideal frequency selective filters
– Section 6.4 Time-domain and frequency-domain aspects of non-ideal
filters
– Section 6.5 First-order and Second-order Continuous-time systems
– Section 6.6 First-order and Second-order Discrete-time systems
– Section 6.7 Examples of time- and frequency domain analysis of systems
•
Reference book
– A. V. Oppenheim, et. al., Discrete-time Signal Processing, 2nd edition,
Prentice-Hall, 1999
– Section 5.7.3 Causal FIR generalized linear phase system
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 4
Introduction
•
Basically, any LTI system can be regarded as filtering system. Some
signals are being suppressed or amplified. Meanwhile, they are also
suffered from different amount of delays.
Input
System
x(t)
•
Output
Input
y(t)
x[n]
System
Output
y[n]
Typically, we can analysis the system performance either in timedomain and/or frequency domain analytical tools.
Time-domain analysis
Transient responses:
-Impulse response
-Step response
-Ramp response
ELEC 215: Tim Woo
Frequency domain analysis
Frequency responses:
-Magnitude and phase spectrum
-Bode plot
Spring 2009/10
Chapter 5 - 5
Time-domain analysis: Transient response
•
We refer to the output response as ‘Transient Response’, the
process generated in going from the initial state to the final state.
•
These responses will allow us to investigate the time domain
characteristics of dynamic systems.
•
Common test signals to produce the response include
– Unit Impulse function
System
Impulse response
time
– Unit Step function
time
– Unit Ramp function
System
Step response
System
Ramp response
time
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 6
Time-domain analysis: Transient response
•
These test signals are chosen because they are simple functions of
time and can be easily implemented in an experimental setting.
•
The different transient responses of the following systems are being
simulated.
– First-order continuous-time / discrete-time system
– Second-order continuous-time / discrete-time system
– Fifth-order continuous-time / discrete-time Butterworth filter
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 7
Time-domain analysis: Transient response
First-order discrete-time LTI system
First-order continuous-time LTI system
Impulse response
Impulse response
2
0.4
1
0.2
0
0
0.5
1
1.5
2
2.5
3
0
0
5
10
Step response
15
20
0
5
10
Ramp response
15
20
0
5
10
Samples
15
20
Step response
1
1
0.5
0.5
0
0
0.5
1
1.5
2
2.5
3
Ramp response
0
4
20
2
10
0
0
0.5
1
1.5
Time /sec
H ( jω ) =
ELEC 215: Tim Woo
2
2.5
3
0
2
jω + 2
H (e jω ) =
Spring 2009/10
0.3
1 − 0.7e − jω
Chapter 5 - 8
Time-domain analysis: Transient response
Second-order continuous-time LTI system
Second-order discrete-time LTI system
Impulse response
Impulse response
1
1
0
0
-1
-1
0
2
4
6
8
10
Step response
2
1
1
0
2
4
6
5
8
10
0
0
5
20
5
10
0
2
4
6
8
Time /sec
H ( jω ) =
1
( jω )2 + 0.6( jω ) + 1
ELEC 215: Tim Woo
15
10
15
10
15
Ramp response
Ramp response
10
0
10
Step response
2
0
0
10
0
0
5
Samples
1 − 1.5 cos( π4 ) + 0.752
H ( e ) = − j 2ω
e
− 1.5 cos( π4 )e − jω + 0.752
jω
Spring 2009/10
Chapter 5 - 9
Time-domain analysis: Transient response
A fifth-order analog Butterworth filter
(BW of 10 rad/s)
A fifth-order digital Butterworth filter
(BW of 0.5π rad/s)
Impulse response
Impulse response
5
0.5
0
0
-5
0
0.5
1
1.5
Step response
2
2.5
3
-0.5
2
2
1
1
0
0
0.5
1
1.5
2
2.5
3
0
0
2
4
6
8
Step response
10
12
14
0
2
4
6
8
Ramp response
10
12
14
0
2
4
6
8
Samples
10
12
14
Ramp response
4
20
2
10
0
0
0.5
1
ELEC 215: Tim Woo
1.5
Time /sec
2
2.5
3
0
Spring 2009/10
Chapter 5 - 10
Time-domain analysis: Transient response
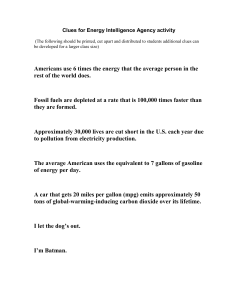
•
Four measurements are often used to specify a system’s performance:
rise time, overshoot, settling time and steady-state error. Their definitions
with respect to step response are provided below.
¾ % Overshoot = (peak value - final value)/ (final value) x 100%
¾ Settling time = time it takes the response to reach its final value (to within a certain
percentage, typical value = 1% or 5%)
¾ Rise time = time it takes the response to go from 10% to 90% of its final value
¾ Steady-state error = % difference between
the commanded position and the
measured position after the transient has
settled down.
Final value
The diagram illustrates the typical
response of a 2nd order continuoustime system and the corresponding
characteristics.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 11
Transient response of LTI systems
•
After discussing the concept of transient response of LTI systems,
we will address the mathematical analysis of
– First-order and second-order continuous-time systems
– First-order and second-order discrete-time systems
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 12
Section 6.5.1 First-order continuous-time systems
•
The differential equation for a first-order
system is often expressed in the form
τ
•
dy (t )
+ y (t ) = x(t )
dt
The corresponding impulse and
frequency responses are
1
CTFT
h(t ) = e −t τ ←⎯
⎯→ H ( jω ) =
τ
•
1
jωτ + 1
The step response of the system is
⎛
S ( jω ) = ⎜⎜
s (t ) = u (t ) * h(t )
⎝
CTFT
←
⎯
⎯
→
= 1 − e −t τ u (t )
⎛
= ⎜⎜
⎝
[
]
ELEC 215: Tim Woo
⎞⎛ 1 ⎞
⎟⎟
+ πδ (ω ) ⎟⎟⎜⎜
jωτ
j
ωτ
1
+
⎠⎝
⎠
⎤
1 ⎞⎛ 1 ⎞ ⎛ πδ (ω ) ⎞ ⎡ 1
1
⎟⎟ = ⎢
⎟⎟ + ⎜⎜
⎟⎟⎜⎜
+ πδ (ω )⎥ −
jωτ ⎠⎝ jωτ + 1 ⎠ ⎝ jωτ + 1 ⎠ ⎣ jωτ
⎦ jωτ + 1
1
Spring 2009/10
Chapter 5 - 13
Section 6.5.2 Second-order continuous-time systems
•
The differential equation for a second-order system is
d 2 y (t )
dy (t )
2
2
+
2
ζω
+
ω
y
(
t
)
=
ω
n
n
n x (t )
2
dt
dt
where
•
ζ
= damping ratio,
ωn = undamped natural frequency
The frequency response for the second-order system is
ωn2
ωn2
=
H ( jω ) =
( jω )2 + 2ζω n ( jω ) + ωn2 ( jω − c1 )( jω − c2 )
where
c1 = −ζω n + ωn ζ 2 − 1,
c2 = −ζω n − ωn ζ 2 − 1
2
2
0
<
ζ
<
1
:
c
=
−
ζω
+
j
ω
1
−
ζ
,
c
=
−
ζω
−
j
ω
1
−
ζ
1
2
n
n
n
n
Case 1:
ζ = 1 : c1 = c2 = −ζω n
Case 2:
Case 3:
ELEC 215: Tim Woo
ζ > 1 : c1 = −ζω n + ωn ζ 2 − 1 < 0, c2 = −ζω n − ωn ζ 2 − 1 < 0
Spring 2009/10
Chapter 5 - 14
Section 6.5.2 Second-order continuous-time systems
Case 1: 0 < ζ < 1 : c1 = −ζω n + jωn 1 − ζ 2 , c2 = −ζω n − jωn 1 − ζ 2
The system function can be decomposed into two terms
H ( jω ) =
⎛ 1
1 ⎞
⎜⎜
⎟⎟
−
2
2 ζ − 1 ⎝ jω − c1 jω − c2 ⎠
ωn
The impulse response of the system is
ωn
⎡ ⎛⎜⎝ −ζω n + jωn
h(t ) =
e
2 ⎢
2 j 1− ζ ⎣
1−ζ 2 ⎞⎟ t
⎠
−e
⎛⎜ −ζω − jω 1−ζ 2 ⎞⎟ t
n
n
⎝
⎠
The system is referred to as
being under-damped.
[
]
⎤
ωn e −ζω nt
sin(ωn 1 − ζ 2 )t u (t )
⎥u (t ) =
1− ζ 2
⎦
The step response of the system is
[
]
⎫⎪
⎧⎪
e −ζωnt
s (t ) = h(t ) ∗ u (t ) = ⎨1 −
ζ sin(ωn 1 − ζ 2 )t + 1 − ζ 2 cos(ωn 1 − ζ 2 )t ⎬u (t )
⎪⎭
1− ζ 2
⎪⎩
Note:
[
c2 e c1t − c1e c2t = (a − jb)e ( a + jb )t − (a + jb)e ( a − jb )t = e at (a − jb)e jbt − (a + jb)e − jbt
ELEC 215: Tim Woo
[
]
= e at a (e jbt − e − jbt ) − jb(e jbt + e − jbt ) = j 2e at [a sin(bt ) − b cos(bt )]
Spring 2009/10
]
Chapter 5 - 15
Section 6.5.2 Second-order continuous-time systems
Case 2:
ζ = 1 : c1 = c2 = −ζω n
The impulse and frequency responses of the system are
h(t ) = ω te
2
n
−ω n t
ωn2
u (t ) ←
⎯→ H ( jω ) =
( jω − ωn )2
L
The step response of the system is
[
]
⎡ 1
⎤
ωn
1
L
⎯→
+ πδ (ω )⎥ −
−
s (t ) = h(t ) ∗ u (t ) = 1 − e −ωnt − ωnte −ωnt u (t ) ←
S ( jω ) = ⎢
2
⎣ jω
⎦ jω − ω n ( j ω − ω n )
The system is referred to as
being critical-damped.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 16
Section 6.5.2 Second-order continuous-time systems
Case 3:
ζ > 1 : c1 = −ζω n + ωn ζ 2 − 1 < 0, c2 = −ζω n − ωn ζ 2 − 1 < 0
The impulse response of the system is
h(t ) =
ωn
2 ζ 2 −1
(e
c1t
−e
c2 t
)u(t ) =
ωn e −ζω t ⎡
n
⎢e
2
2 ζ −1 ⎣
⎛⎜ ω ζ 2 −1 ⎞⎟ t
⎠
⎝ n
The step response of the system is
⎧⎪
ωn ⎛ e c1t e c2t ⎞⎫⎪
⎟⎟⎬u (t )
⎜⎜
s(t ) = h(t ) ∗ u (t ) = ⎨1 +
−
2
c
c
⎪⎩ 2 ζ − 1 ⎝ 1
2 ⎠⎪
⎭
[
−e
−⎛⎜ ω n ζ 2 −1 ⎞⎟ t
⎠
⎝
⎤
⎥u (t )
⎦
The system is referred to as
being over-damped.
]
⎧⎪
⎫⎪
e −ζωnt
2
2
2
= ⎨1 +
ζ sinh(ωn ζ − 1)t + ζ − 1 cosh(ωn ζ − 1)t ⎬u (t )
2
ζ −1
⎪⎩
⎪⎭
Note:
[
c2 e c1t − c1e c2t = (a − b)e ( a +b ) t − (a + b)e ( a −b ) t = e at (a − b)e bt − (a + b)e − bt
[
]
]
= e at a (e bt − e −bt ) − b(e bt + e −bt ) = 2e at [a sinh(bt ) − b cosh(bt )]
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 17
Section 6.5.2 Second-order continuous-time systems
h(t ) =
ωn e −ζω t
n
1− ζ 2
[sin(ω
h(t ) = ωn2te −ωnt u (t )
h(t ) =
ωn e −ζω t ⎡
n
]
1 − ζ 2 )t u (t )
0 < ζ <1
ζ =1
⎛⎜ ω ζ 2 −1 ⎞⎟ t
n
⎠
⎝
⎢e
2
2 ζ −1 ⎣
[
n
−e
⎤
⎥u (t )
⎦
ζ >1
]
0 < ζ <1
−⎛⎜ ω n ζ 2 −1 ⎞⎟ t
⎝
⎠
⎫⎪
⎧⎪
e −ζω nt
s (t ) = ⎨1 −
ζ
sin(ωot ) + 1 − ζ 2 cos(ωot ) ⎬u (t )
1− ζ 2
⎪⎭
⎪⎩
s (t ) = 1 − e −ωnt − ωnte −ωnt u (t ) ζ = 1
[
]
[
]
⎫⎪
⎧⎪
e −ζω nt
s (t ) = ⎨1 +
ζ
sinh(ωot ) + ζ 2 − 1 cosh(ωot ) ⎬u (t )
ζ 2 −1
⎪⎭
⎪⎩
where
ELEC 215: Tim Woo
ζ >1
ωo = ω n ζ 2 − 1
Spring 2009/10
Chapter 5 - 18
Section 6.6.1 First-order discrete-time systems
•
The difference equation for a first-order system is often expressed in
the form
y[n] − ay[n − 1] = x[n],
•
The corresponding impulse and frequency responses are
Z
h[n] = a nu[n] ←⎯→
H ( e jω ) =
•
a <1
1
1 − ae − jω
The step response of the system is
∞
1
⎛ 1
⎞⎛
⎞
+
−
πδ
ω
π
S (e ) = ⎜
k
(
2
)
⎟
⎜
∑
− jω
− jω ⎟
k = −∞
⎝1− e
⎠⎝ 1 − ae ⎠
s[n] = u[n] * h[n]
1
⎞ ⎛ 1 ⎞ ∞
⎛ 1 ⎞⎛
Z
n +1
←⎯→
=⎜
+
⎟ ∑ πδ (ω − 2πk )
1− a
− jω ⎟⎜
− jω ⎟ ⎜
=
u[n]
⎝ 1 − e ⎠⎝ 1 − ae ⎠ ⎝ 1 − a ⎠k = −∞
1− a
∞
1 ⎛ 1
1
⎞
=
+
−
−
πδ
ω
π
k
(
2
)
⎜
⎟
∑
1 − a ⎝ 1 − e − jω k = −∞
1 − ae − jω ⎠
jω
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 19
Section 6.6.1 First-order discrete-time systems
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 20
Section 6.6.2 Second-order discrete-time systems
•
The difference equation for a second-order system is
y[n] − (2r cos θ ) y[n − 1] + r 2 y[n − 2] = x[n]
where 0 < r < 1 , 0 ≤ θ ≤ π .
•
The frequency response for the second-order system is
H ( e jω ) =
Case 1:
Case 2:
Case 3:
Case 4:
ELEC 215: Tim Woo
1
1
=
1 − (2r cos θ )e − jω + r 2 e − j 2ω 1 − re jθ e − jω 1 − re − jθ e − jω
θ =0
(
)(
)
Critically damped system
θ =π
0 < θ < π Under-damped system
The system has two distinct real roots.
Spring 2009/10
Chapter 5 - 21
Section 6.6.2 Second-order discrete-time systems
•
•
Case 1: θ = 0
The frequency response becomes
H ( e jω ) =
•
•
•
Case 2: θ = π
The frequency response becomes
1
H ( e jω ) =
(1 − re )
− jω 2
The impulse response becomes
•
− jω 2
h[n] = (n + 1)(−r ) n u[n]
The step response becomes
•
The step response becomes
s[n] = h[n] ∗ u[n]
s[n] = h[n] ∗ u[n]
⎡ 1
r n +1
(n + 1)r n +1 ⎤
=⎢
−
+
⎥u[n]
2
2
r
1
−
⎦
⎣ (r − 1) (r − 1)
ELEC 215: Tim Woo
(1 + re )
The impulse response becomes
h[n] = (n + 1)r nu[n]
•
1
Spring 2009/10
⎡ 1
r (−r ) n (n + 1)r (−r ) n ⎤
+
=⎢
−
⎥u[n]
2
2
r
1
+
⎦
⎣ (r + 1) (r + 1)
Chapter 5 - 22
Section 6.6.2 Second-order discrete-time systems
•
Case 3: 0 < θ < π
The system function can be decomposed into two terms
1
H (e ) =
2 j sin θ
jω
⎡
⎤
e jθ
e − jθ
−
⎢
⎥
j θ − jω
1 − re − jθ e − jω ⎦
⎣1 − re e
The impulse response of the system is
h[n] =
[
(
1
e jθ re jθ
2 j sin θ
)
n
(
+ e − jθ re − jθ
) ]u[n] = r
n
n
sin[(n + 1)θ ]
u[n]
sin θ
The step response of the system is
s[n] = h[n] ∗ u[n]
1
=
2 j sin θ
(
)
(
)
− jθ n +1 ⎤
⎡ jθ 1 − re jθ n +1
−
1
re
− e − jθ
⎢e
⎥u[n]
jθ
− jθ
1 − re
1 − re
⎣⎢
⎦⎥
⎧ sin θ − r n +1 sin[(n + 2)θ ] + r n + 2 sin[(n + 1)θ ]⎫
=⎨
⎬u[n]
sin θ
⎩
⎭
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 23
Section 6.6.2 Second-order discrete-time systems
•
Case 4: Consider the system has two distinct real roots. The system
function becomes
H ( e jω ) =
1
1
=
1 − d1e − jω 1 − d 2 e − jω
d1 − d 2
(
)(
)
•
The impulse response of the system is
•
The step response of the system is
1
s[n] = h[n] ∗ u[n] =
d1 − d 2
•
⎡ d1
⎤
d2
−
⎢
⎥
− jω
1 − d 2 e − jω ⎦
⎣1 − d1e
⎛ d1n +1 − d 2n +1 ⎞
⎟⎟u[n]
h[n] = ⎜⎜
d
d
−
2
⎝ 1
⎠
⎡ ⎛ 1 − d1n +1 ⎞
⎛ 1 − d 2n +1 ⎞⎤
⎟⎟ − d 2 ⎜⎜
⎟⎟⎥u[n]
⎢d1 ⎜⎜
−
d
−
1
1
d
1 ⎠
2 ⎠⎦
⎝
⎣ ⎝
The system is over-damped when d1 and d2 are positive.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 24
Section 6.6.2 Second-order discrete-time systems
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 25
Frequency-domain analysis: Frequency response
•
In the review, we addressed the advantages of Frequency domain
analysis:
1. Convolution in time
Differentiation in time
Difference in time
2. Filtering > easier to visualize in frequency domain
3. Characteristics of speech/communication, etc. > easier to visualize in
frequency domain
•
Need trade-offs between time-domain and frequency-domain
characteristics (e.g. implementing a filter) for system design analysis
and implementation
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 26
Frequency-domain analysis: Frequency response
•
From the convolution property, we have
Continuous-Time System response
Y ( jω ) = H ( jω ) X ( jω )
•
Discrete-Time system response
Y (e jω ) = H (e jω ) X (e jω )
With the use of magnitude-phase representation, the relationship
between input signal, system function and output signal can be rewritten as
– Magnitude (It is also referred as Magnitude Response / Spectrum)
Continuous-Time System response
Y ( jω ) = H ( jω ) X ( jω )
Discrete-Time system response
Y (e jω ) = H (e jω ) X (e jω )
– Phase (It is also referred as Phase Response / Spectrum)
Continuous-Time System response
Discrete-Time system response
∠Y ( jω ) = ∠H ( jω ) + ∠X ( jω )
∠Y (e jω ) = ∠H (e jω ) + ∠X (e jω )
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 27
Frequency-domain analysis: Frequency response
•
Magnitude information:
–
–
–
–
It is also called Magnitude Spectrum / Magnitude Response
Magnitude: |H(jω)| for continuous-time, |H(ejω)| for discrete-time
It can be referred as gain of system.
Gain distortion affects the time-domain signal, and it can be important in
signal amplification or rejection.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 28
Frequency-domain analysis: Frequency response
•
Phase information:
–
–
–
–
It is also called Phase Spectrum / Phase Response
Phase: ∠H(jω) for continuous-time, ∠H(ejω) for discrete-time
It can be referred as the amount of delay of system
Phase distortion affects time-domain signal, and it can be important (in
image) or insignificant (in speech)
• However, severe phase distortion is also important in speech signal x(-t)
A tape played backwards
ℑ{x(−t )} = X (− jω ) = X ( jω ) e − j∠X ( jω )
Phase distortion
– Meanwhile, the non-linearity of the phase response tells us how much
phase distortion in the system.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 29
Frequency-domain analysis: Frequency response
•
For a stable LTI system has a rational system function, then its
frequency response has the form,
Continuous-Time System response
Discrete-Time system response
M
∑k =0 bk ( jω )
M
H ( jω ) =
∑
k
k
ω
(
)
a
j
k
k =0
M
=
b0
a0
∏ ( jω − c )
k
k =0
N
∏ ( jω − d )
M
H ( e jω ) =
k
k =0
ELEC 215: Tim Woo
Spring 2009/10
∑a e
− jωk
∑b e
− jω k
k =0
M
k =0
k
k
∏ (1 − c e
M
b
= 0
a0
− jω k
k
k =0
N
∏ (1 − d e
k
− jωk
)
)
k =0
Chapter 5 - 30
Frequency-domain analysis: Frequency response
•
The magnitude response of a rational system function is
Continuous-Time System response
Discrete-Time system response
M
M
b0
a0
H ( jω ) =
∏ jω − c
k
k =0
N
∏ jω − d
k
k =0
•
H ( e jω ) =
b0
a0
∏ 1− c e
− j ωk
k
k =0
N
∏ 1− d e
− jωk
k
k =0
Sometimes it is convenient to consider the gain in dB scale, so
Continuous-Time System response
10 log10 H ( jω ) = 20 log10
2
b0
M
N
+ 20∑k =0 log10 jω − ck − 20∑k =0 log10 jω − d k
a0
Discrete-Time system response
2
10 log10 H (e jω ) = 20 log10
ELEC 215: Tim Woo
b0
M
N
+ 20∑k =0 log10 1 − ck e − jωk − 20∑k =0 log10 1 − d k e − jωk
a0
Spring 2009/10
Chapter 5 - 31
Frequency-domain analysis: Frequency response
•
The phase response of a rational system function is
Continuous-Time System response
⎛b ⎞
M
N
∠H ( jω ) = ∠⎜⎜ 0 ⎟⎟ + ∑k =0 ∠( jω − ck ) − ∑k =0 ∠( jω − d k )
⎝ a0 ⎠
Discrete-Time system response
⎛b ⎞
M
N
∠H (e jω ) = ∠⎜⎜ 0 ⎟⎟ + ∑k =0 ∠ 1 − ck e − jωk − ∑k =0 ∠ 1 − d k e − jωk
⎝ a0 ⎠
(
•
•
)
(
)
Sometimes, ∠H ( jω ) denotes as arg H ( jω ). So as arg H (e jω ) for ∠H (e jω )
Usually, two different format in phase response
– Unwrapped phase: It is a continuous phase
– Wrapped phase: It wraps the phase in the range from –π to π.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 32
Frequency-domain analysis: Frequency response
•
A bode plot shows the frequency response of system function using
– A logarithm frequency scale for magnitude spectrum
– A wrapped / unwarpped phase spectrum
•
If h(t) ( or h[n] ) is real,
– Magnitude spectrum |H(jω)| (or |H(ejω)| ) is even symmetry.
– Phase spectrum ∠H(jω) (or ∠H(ejω) ) is odd symmetry.
•
Therefore, the plot for positive ω is enough.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 33
Frequency-domain analysis: Frequency response
First-order discrete-time LTI system
First-order continuous-time LTI system
Bode Diagram
0
Magnitude (dB)
0
Magnitude (dB)
-10
-20
-5
-10
-15
-30
-20
-45
-90
0
0.2
0
0.2
0.4
0.6
0.8
1
0.8
1
0
Phase (deg)
Phase (deg)
-40
0
-1
10
0
1
10
10
2
10
-20
-40
-60
Frequency (rad/sec)
H ( jω ) =
ELEC 215: Tim Woo
2
jω + 2
0.4
0.6
Normalized frequency ω ( x π )
H ( e jω ) =
Spring 2009/10
0.3
1 − 0.7e − jω
Chapter 5 - 34
Frequency-domain analysis: Frequency response
Second-order continuous-time LTI system
Second-order discrete-time LTI system
5
0
0
Magnitude (dB)
Magnitude (dB)
Bode Diagram
20
-20
-40
-60
-5
-10
-15
0
0.2
0
0.2
0.4
0.6
0.8
1
0.8
1
-80
0
20
0
Phase (deg)
Phase (deg)
-45
-90
-135
-180
-2
10
-1
0
10
10
1
10
2
10
-20
-40
-60
-80
Frequency (rad/sec)
H ( jω ) =
1
( jω )2 + 0.6( jω ) + 1
ELEC 215: Tim Woo
0.4
0.6
Normalized frequency ω ( x π )
1 − 1.5 cos( π4 ) + 0.752
H ( e ) = − j 2ω
e
− 1.5 cos( π4 )e − jω + 0.752
jω
Spring 2009/10
Chapter 5 - 35
Frequency-domain analysis: Frequency response
A fifth-order analog Butterworth filter
(BW of 10 rad/s)
A fifth-order digital Butterworth filter
(BW of 0.5π rad/s)
Bode Diagram
0
100
Magnitude (dB)
Magnitude (dB)
-20
-40
-60
-80
-200
-300
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Normalized frequency ω ( x π )
0.8
0.9
1
0
-90
-100
Phase (deg)
Phase (deg)
-100
-400
-100
0
-180
-270
-360
-450
0
-200
-300
-400
-500
0
1
10
10
2
10
Frequency (rad/sec)
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 36
Frequency response of LTI systems
•
After discussing the concept of frequency response of LTI systems,
we will address the mathematical analysis of
– First-order and second-order continuous-time systems
– First-order and second-order discrete-time systems
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 37
Section 6.5.1 First-order continuous-time systems
•
The frequency response of a typical first-order system is
H ( jω ) =
•
1
jωτ + 1
The log magnitude of system is
[
]
20 log10 H ( jω ) = −10 log10 (ωτ ) 2 + 1
•
The phase of system is
∠H ( jω ) = − tan −1 (ωτ )
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 38
Section 6.5.2 Second-order continuous-time systems
•
The frequency response for the second-order system is
ωn2
ωn2
H ( jω ) =
= 2
2
2
( jω ) + 2ζω n ( jω ) + ωn (ωn − ω 2 ) + j (2ζω nω )
•
The log magnitude of system is
[(
)
20 log10 H ( jω ) = 40 log10 ωn − 10 log10 ωn2 − ω 2 + (2ζω nω )
•
2
2
]
The phase of system is
⎛ 2ζω ω ⎞
∠H ( jω ) = − tan −1 ⎜⎜ 2 n 2 ⎟⎟
⎝ ωn − ω ⎠
•
H ( jω )
has a maximum value
at ωmax = ωn 1 − 2ζ 2 with H ( jωmax ) =
ELEC 215: Tim Woo
1
2ζ 1 − ζ 2
Spring 2009/10
Chapter 5 - 39
Section 6.6.1 First-order discrete-time systems
1
frequency response of first-order system is
1 − ae − jω
2
log magnitude of system is 20 log10 H ( jω ) = −20 log10 1 + a − 2a cos ω
•
The
•
•
The
The phase of system is
ELEC 215: Tim Woo
H ( e jω ) =
[
]
⎡ a sin ω ⎤
∠H ( jω ) = − tan −1 ⎢
⎥
⎣1 − a cos ω ⎦
Spring 2009/10
Chapter 5 - 40
Section 6.6.2 Second-order discrete-time systems
•
The frequency response for the second-order system is
H ( e jω ) =
ELEC 215: Tim Woo
1
1 − (2r cos θ )e − jω + r 2 e − j 2ω
Spring 2009/10
Chapter 5 - 41
Section 6.6.2 Second-order discrete-time systems
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 42
Section 6.5.3 Bode plots for rational Frequency responses
•
Recall, the frequency response of a typical first-order continuous-time
LTI system
H ( jω ) =
1
jωτ + 1
=
1
jω
1
+1
τ
Numerical values
H ( jω )
20 log H ( jω )
∠H ( jω )
1
0 dB
0
≈1
0 dB
- 0.03π
≈ 0.893
- 0.97 dB
- 0.15π
τ
≈ 0.707
- 3.01 dB
- 0.25π
2
≈ 0.447
- 6.99 dB
- 0.35π
≈ 0.1
- 20 dB
- 0.47π
≈ 0.01
- 40 dB
- 0.5π
≈ 0.001
- 60 dB
- 0.5π
ω
0
0.1 τ
0.5 τ
τ
10 τ
100 τ
1000 τ
ELEC 215: Tim Woo
Spring 2009/10
[
]
20 log10 H ( jω ) = −10 log10 (ωτ ) 2 + 1
∠H ( jω ) = − tan −1 (ωτ )
Chapter 5 - 43
Section 6.5.3 Bode plots for rational Frequency responses
•
Clearly, the actual curves are very difficult to plot, but we can identify
some useful asymptotes for continuous-time LTI system.
•
For the magnitude spectrum, we have two asymptotes:
– A horizontal line
– A straight line with a slope of -20 dB / decade
– They meet at the point associated with ω = 1
τ
•
For the magnitude spectrum, we have three asymptotes:
– Two horizontal lines
– A straight line with a slope of -45° ( or -π/4 ) / decade
– They meet at the points associated with ω = 0.1 and ω = 10
τ
τ
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 44
Section 6.5.3 Bode plots for rational Frequency responses
•
Similarly, we can also identify some useful asymptotes for secondorder continuous-time LTI system
ωn2
ωn2
H ( jω ) =
=
( jω )2 + 2ζω n ( jω ) + ωn2 (ωn2 − ω 2 ) + j (2ζω nω )
-40dB / decade
Numerical values for ζ = 0.1
ω
0
0.1
0.5
ωn
ωn
ωmax
ωn
2 ωn
10 ω n
100 ω n
1000 ω n
ELEC 215: Tim Woo
H ( jω )
20 log H ( jω )
∠H ( jω )
1
0 dB
0
≈ 1.01
0.09 dB
- 0.01π
≈ 1.32
2.42 dB
- 0.04π
≈ 5.03
14.02 dB
- 0.47π
≈5
13.98 dB
- 0.50π
≈ 0.33
- 9.62 dB
- 0.96π
≈ 0.01
- 39.91 dB
- 0.99π
≈ 0.001
- 80 dB
-π
≈ 10-6
- 120 dB
-π
Spring 2009/10
- π/2 / decade
Chapter 5 - 45
Section 6.5.3 Bode plots for rational Frequency responses
•
Consider the frequency responses of the forms
⎛ jω ⎞ ⎛ jω ⎞
~
⎟⎟ + ⎜⎜
⎟⎟
H ( jω ) = 1 + 2ζ ⎜⎜
ω
ω
⎝ n⎠ ⎝ n⎠
~
H ( jω ) = 1 + jωτ
•
The bode plots of these systems follow directly from Figures 6.20
and 6.23 and the from the fact that
~
20 log10 H ( jω ) = 20 log10
~
∠H ( j ω ) = ∠
•
2
1
= −20 log10 H ( jω )
H ( jω )
1
= −∠H ( jω )
H ( jω )
For the magnitude and phase spectrum, the asymptotes are
horizontal line(s) and straight line with positive slope. Their meeting
points remain the same.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 46
Section 6.5.3 Bode plots for rational Frequency responses
•
Also, consider a system function that is a constant gain
~
H ( jω ) = K
•
Its magnitude and phase spectrum are
~
20 log10 H ( jω ) = 20 log10 K
⎧ 0, K > 0
~
∠H ( jω ) = ⎨
⎩π , K < 0
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 47
Section 6.5.3 Bode plots for rational Frequency responses
•
Example 6.5 Consider the frequency response
H ( jω ) =
=
100(1 + jω )
(10 + jω )(100 + jω )
⎞⎛
⎞
1⎛
1
1
⎜⎜
⎟⎟⎜⎜
⎟(1 + jω )
10 ⎝ 1 + jω 10 ⎠⎝ 1 + jω 100 ⎟⎠
DC gain : 1/10
poles: 10, 100
zero : 1
Solid line: actual Bode plot
Dash line: Bode plot is obtained by straight-line approximation
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 48
Section 6.5.3 Bode plots for rational Frequency responses
•
Example 6.5 (Cont’d) The details of straight-line approximation:
H ( jω ) =
⎞⎛
⎞
100(1 + jω )
1⎛
1
1
⎟⎟⎜⎜
⎟(1 + jω )
= ⎜⎜
(10 + jω )(100 + jω ) 10 ⎝ 1 + jω 10 ⎠⎝ 1 + jω 100 ⎟⎠
DC gain : 1/10
poles: 10, 100
zero : 1
Magnitude
1
10
100
Magnitude
1
ELEC 215: Tim Woo
10
Spring 2009/10
100
ω
ω
Chapter 5 - 49
Section 6.5.3 Bode plots for rational Frequency responses
•
Example 6.5 (Cont’d)
0dB / decade
Magnitude
20dB / decade
0dB / decade
-20dB / decade
-20dB
0.1
1
10
100
1000
0.1
1
10
100
1000
ω
0dB
-20dB
ω
-40dB
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 50
Section 6.5.3 Bode plots for rational Frequency responses
•
Example 6.5 (Cont’d)
H ( jω ) =
⎞⎛
⎞
100(1 + jω )
1⎛
1
1
⎟⎟⎜⎜
⎟(1 + jω )
= ⎜⎜
(10 + jω )(100 + jω ) 10 ⎝ 1 + jω 10 ⎠⎝ 1 + jω 100 ⎟⎠
DC gain : 1/10
poles: 10, 100
zero : 1
Phase
0.1
1
10
100
ω
1000
0 rad / decade
Phase
0.1
ELEC 215: Tim Woo
1
10
Spring 2009/10
100
1000
ω
Chapter 5 - 51
Section 6.5.3 Bode plots for rational Frequency responses
•
Example 6.5 (Cont’d)
0 rad / decade
-π/4 rad / decade
π/4 rad / decade
0 rad / decade
-π/2 rad / decade
0 rad
Phase
0.1
1
10
100
1000
0.1
1
10
100
1000
ω
π/4 rad
0 rad
ω
-π/4 rad
-π/2 rad
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 52
Section 6.4 Time- and Frequency- domain aspects of non-ideal filters
•
The non-ideal filters have several advantages:
–
–
–
–
Easier to filter with gradual transition from pass-band to stop-band
Eliminate ringing / ripples in the step response
Causal filters for real-time operation
Easier and cheaper to implement with resisters, capacitors, op-amp
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 53
Section 6.4 Time- and Frequency- domain aspects of non-ideal filters
•
Trade-off is observed between the width of the transition band
(frequency-domain characteristic) and the settling time of the step
response (time-domain characteristic):
Butterworth filter
- Longer transition band
- Shorter settling time
Elliptic filter
- Shorter transition band
- Longer settling time
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 54
Section 6.2 Linear and non-linear phase systems
•
A convenient measure of linearity of phase is group delay.
Continuous-Time System response
τ (ω ) = grd [H (e jω )]
τ (ω ) = grd [H ( jω )]
=−
Discrete-Time system response
d
{arg[H ( jω )]}
dω
=−
{ [ ( )]}
d
arg H e jω
dω
•
The deviation of the group delay from a constant indicates the
degree of non-linearity of phase.
•
Consider a discrete-time system with a constant delay nd
y[n] = Ax[n − nd ]
Y (e jω ) = AX (e jω )e − jωnd ⇒ τ (ω ) = −
d
{− ωnd } = nd
dω
H (e jω ) = Ae − jωnd
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 55
Section 6.2 Linear and non-linear phase systems
•
Consider a continuous-time system with the system function
– Unity gain |H(jω)|=1
– Linear phase: ∠H(jω)= -ωto
•
•
Non-linear phase: ∠H2(jω) is non-linear function of ω→g(ω)
Result:
– Linear phase ⇔ simply a rigid shift in time, no distortion
– Nonlinear phase ⇔ distortion as well as shift
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 56
Section 6.2 Linear and non-linear phase systems
•
Let’s consider an all-pass system
– It passes all the frequencies with equal gain. i.e H ( jω ) = K or H (e jω ) = K
– A simple but often used application of an all-pass filter is as a delay
equalizer (phase compensator).
Continuous-time system
H ( jω ) = e − jαω
Discrete-time system
( )
H (e ) = 1
∠H (e ) = −ωn
H e j ω = e − jω n d
- Linear phase
H ( jω ) = 1
jω
∠H ( jω ) = −αω
H ( jω ) =
α − jω
α + jω
jω
- Non-linear phase
α 2 +ω2
H ( jω ) =
=1
α 2 +ω2
ω
∠H ( jω ) = −2 tan −1
α
ELEC 215: Tim Woo
- Linear phase
( )
He
jω
1 − 12 e jω
=
1 − 12 e − jω
=
Spring 2009/10
- Non-linear phase
(1 − 12 cos ω )2 + ( 12 sin ω )2
(1 − 12 cos ω )2 + ( 12 sin ω )2
( ) = −2 tan
∠H e
jω
d
−1
=1
sin ω
1 − 12 cos ω
1
2
Chapter 5 - 57
Section 6.2 Linear and non-linear phase systems
Impulse response and output of a continuous-time all-pass system with nonlinear
phase
Wrapped Phase
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 58
Section 6.2 Linear and non-linear phase systems
How do we think about signal delay when the phase is nonlinear?
Similar property can
be applied onto
discrete-time system
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 59
Section 6.2 Linear and non-linear phase systems
Example: Effects of Attenuation and Group Delay
Frequency response of system
Delay
Gain
Input signal
at ω = 0.25 π, gain ~= -3dB, delay = 200 samples
at ω = 0.5 π, gain ~= 0dB, delay = 50 samples
at ω = 0.85 π, gain = -100dB, delay = 50 samples
ELEC 215: Tim Woo
Spring 2009/10
Output signal
Chapter 5 - 60
Section 6.2 Linear and non-linear phase systems
•
In the example, we demonstrate characteristic of filtering system:
– It filtered out those un-desired frequency signals.
– However, the remaining signals (signals in the passband) suffer from
different delay spreading due to the non-linear phase response.
•
In the followings, we will discuss some typical examples of discretetime LTI linear-phase systems.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 61
Reference book: 5.7.3 Causal FIR generalized linear phase system
•
A causal Mth order FIR (Finite Impulse Response) systems have
linear phase if they have impulse response a length of (M +1) and
satisfy either
or
•
( ) ( )
H e jω = A e jω e − j (αω − β )
τ (ω ) = grd [H (e jω )] = −
{ [ ( )]}= − ddω [− (αω − β )] = α
d
arg H e jω
dω
In the deriving these expressions, it turns out that significantly
different expressions results, depending on
– the type of symmetry (even or odd symmetry) and
– whether M is an even or odd integer.
•
For this reason, it is generally useful to define four types of FIR
linear-phase systems.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 62
Reference book: 5.7.3 Causal FIR generalized linear phase system
•
There are 4 different types FIR linear-phase systems:
– Type I FIR Linear-phase systems:
h[n] = h[ M − n]
for 0 ≤ n ≤ M
with M is even.
– Type II FIR Linear-phase systems:
h[n] = h[ M − n]
for 0 ≤ n ≤ M
with M is odd.
– Type III FIR Linear-phase systems:
h[n] = −h[ M − n]
for 0 ≤ n ≤ M
with M is even.
– Type IV FIR Linear-phase systems:
h[n] = −h[ M − n]
ELEC 215: Tim Woo
for 0 ≤ n ≤ M with M is odd.
Spring 2009/10
Chapter 5 - 63
Reference book: 5.7.3 Causal FIR generalized linear phase system
•
Type I FIR filter with M is even,
h[n] = h[ M − n]
•
for 0 ≤ n ≤ M
Its frequency response becomes
( ) = ∑ h[n]e
He
M
jω
− jωn
=
n =0
=e
− jωM / 2
M / 2 −1
∑ h[n]e
− jωn
n =0
+ h[ ]e
M
2
− jωM / 2
M
+
∑ h[n]e
− jωn
n = M / 2 +1
M /2
∑ a[k ] cos(ωk )
k =0
where
a[0] = h[M 2]
a[k ] = 2h[(M 2 ) − k ];
ELEC 215: Tim Woo
for
k = 1,2, K , M 2
Spring 2009/10
Chapter 5 - 64
Reference book: 5.7.3 Causal FIR generalized linear phase system
•
The details of the expression of its frequency response:
( ) = ∑ h[n]e
He
jω
M
− jωn
n =0
=e
− jω M / 2
=e
− jω M / 2
=e
− jω M / 2
=
M / 2 −1
∑ h[n]e
n =0
− jω n
+ h[ ]e
M
2
− jωM / 2
+
M
∑ h[n]e
− jω n
n = M / 2 +1
M
⎛ M / 2−1
⎞
− jω ( n − M / 2 )
M
+ h[ 2 ] + ∑ h[n]e − jω ( n − M / 2 ) ⎟
⎜ ∑ h[n]e
n = M / 2 +1
⎝ n =0
⎠
M / 2 −1
⎛ M / 2−1
⎞
− jω ( n − M / 2 )
M
+ h[ 2 ] + ∑ h[ M − k ]e − jω ( M / 2− k ) ⎟ , k = M − n
⎜ ∑ h[n]e
k =0
⎝ n =0
⎠
M / 2 −1
⎛ M / 2−1
⎞
− jω ( n − M / 2 )
M
+ h[ 2 ] + ∑ h[n]e jω ( n − M / 2 ) ⎟
⎜ ∑ h[n]e
n =0
⎝ n =0
⎠
1
⎛ 1 M
⎞
− jω k
M
=e
+ h[ 2 ] + ∑ h[ M2 − k ]e jωk ⎟ , k =
⎜ ∑ h[ 2 − k ]e
k =M / 2
⎝ k =M / 2
⎠
1
⎞
− jω M / 2 ⎛
=e
⎜ ∑ 2h[ M2 − k ] cosωk + h[ M2 ] ⎟
⎝ k =M / 2
⎠
− jω M / 2
=e
− jω M / 2
M /2
∑ a[k ] cos(ωk )
k =0
ELEC 215: Tim Woo
M
2
−n
a[0] = h[M 2]
a[k ] = 2h[(M 2 ) − k ];
Spring 2009/10
for
k = 1,2, K , M 2
Chapter 5 - 65
Reference book: 5.7.3 Causal FIR generalized linear phase system
•
Example 5.17 Consider an impulse response
⎧1, 0 ≤ n ≤ 4
h[n] = ⎨
⎩0, otherwise
•
The frequency response is
( ) = ∑ (1)e
He
4
jω
n =0
− jωn
1 − e − jω 5
=
=
− jω
1− e
=
=
=
τ (ω ) = grd [H (e jω )] = −
ELEC 215: Tim Woo
Group delay
{ [ ( )]}=
d
arg H e jω
dω
Spring 2009/10
Chapter 5 - 66
Reference book: 5.7.3 Causal FIR generalized linear phase system
• Summary of the linear-phase systems
FIR Linearphase system
Type I
Impulse
response
h[n] = h[ M − n]
M is even
Frequency response
Example
⎛ M /2
⎞
H e jω = e − jωM / 2 ⎜ ∑ a[k ] cos(ωk )⎟
⎝ k =0
⎠
a[0] = h[ M 2]
( )
a[k ] = 2h[(M 2 ) − k ], k = 0,1,2,K, M 2
Type II
h[n] = h[ M − n]
M is odd
Type III
h[n] = −h[ M − n]
M is even
Type IV
h[n] = −h[ M − n]
M is odd
ELEC 215: Tim Woo
⎛ ( M +1)/ 2
⎞
H e jω = e − jωM / 2 ⎜⎜ ∑ b[k ] cos(ω (k − 12 ))⎟⎟
⎝ k =0
⎠
b[k ] = 2h[(M + 1) / 2 − k ], k = 0,1,2, K, (M + 1) 2
( )
⎛ M /2
⎞
H e jω = je − jωM / 2 ⎜ ∑ c[k ] sin (ωk )⎟
⎝ k =0
⎠
c[k ] = 2h[(M 2 ) − k ], k = 0,1,2,K , M 2
( )
⎛ ( M +1)/ 2
⎞
H e jω = je − jωM / 2 ⎜⎜ ∑ d [k ] sin (ω (k − 12 ))⎟⎟
⎝ k =0
⎠
d [k ] = 2h[(M + 1) / 2 − k ], k = 0,1,2,K, (M + 1) 2
( )
Spring 2009/10
Chapter 5 - 67
Reference book: 5.7.3 Location of zeros for causal FIR linear phase system
•
In the symmetric cases (Type I and II), h[n] = h[ M − n]
M
H (z ) = ∑ h[n]z
n =0
•
•
−n
M
= ∑ h[ M − n]z
−n
=
n =0
0
∑ h[k ]z
k
( )
z − M = z − M H z −1
k =M
This implies that if z0 = re jθ is a zero of H(z),
z0−1 = r −1e − jθ is also a zero of H(z) for both M is even and M is odd.
Im
•
z-plane
z0 = re jθ
In addition, when h[n] is real,
the conjugates are also zeros.
Re
Where are the poles?
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 68
Reference book: 5.7.3 Location of zeros for causal FIR linear phase system
•
In the symmetric cases (Type I and II), h[n] = h[ M − n]
( )
H (z ) = z − M H z −1
•
In particular, z = -1,
H (− 1) = (− 1)
−M
•
H (− 1)
when M is odd (Type II FIR filter)
z = -1 must be a zero
•
In summary:
– The zeros of Type I and II FIR linear-phase systems are in reciprocal
and conjugate pairs.
– In addition, Type II FIR linear-phase system has a zero at z = -1
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 69
Reference book: 5.7.3 Location of zeros for causal FIR linear phase system
•
Similarly, Type III and IV FIR lV linear-phase systems h[n] = −h[ M − n]
•
•
Their transfer functions are in the form of
Then, we have
( )
H ( z ) = − z − M H z −1
– The zeros are also in reciprocal and conjugate pairs.
– Type III and IV FIR linear-phase systems have a zero at z =1.
– Type III FIR linear-phase system ( M is even) has a zero at z = -1.
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 70
Reference book: 5.7.3 Location of zeros for causal FIR linear phase system
M is even
M is odd
M is odd
M is even
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 71
Transient and Frequency response of LTI systems
• Readings
– Textbook:
• Section 6.2 The Magnitude-phase representation of the frequency
response of LTI systems
• Section 6.3 Time-domain properties of an ideal frequency selective
filters
• Section 6.4 Time-domain and frequency-domain aspects of nonideal filters
• Section 6.5 First-order and Second-order Continuous-time systems
• Section 6.6 First-order and Second-order Discrete-time systems
• Section 6.7 Examples of time- and frequency domain analysis of
systems
– Reference book
• A. V. Oppenheim, et. al., Discrete-time Signal Processing, 2nd
edition, Prentice-Hall, 1999
• Section 5.7.3 Causal FIR generalized linear phase system
ELEC 215: Tim Woo
Spring 2009/10
Chapter 5 - 72
Where we are
Continuous-time
Hardware
Implementation
Discrete-time
Closed-loop
Systems
Open-loop
Systems
State-space
model
Mapping
Differential
equations
System
Characteristics
System
Responses
Open-loop
Systems
State-space
model
Difference
equations
CTFT
DTFT
Laplace
Transform
z-Transform
Will be covered if available Done in 211 To be covered
ELEC 215: Tim Woo
Hardware
Implementation
Closed-loop
Systems
Spring 2009/10
In progress
System
Characteristics
System
Responses
Done
Chapter 5 - 73