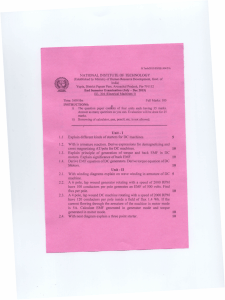
ELECTROTECHNICS N5
LE Ching
TROUPANT
Publishers
Copyright © 1987 by the author
All rights reserved. No part of this publication may be
reproduced or transmitted in any form or by any means
without prior written permission by the publisher.
ISBN: 978 1 919780 28 3; jjjj
First edition 2003
Second impression 2003
Third impression 2003
Fourth impression 2003
Fifth impression 2005
Sixth impression 2006
Seventh impression 2008
Eighth impression 2008
Ninth impression 2012
Tenth impression 2012
Published by
Troupant Publishers
Suite 10, Private Bag X12
Cresta, 2118
Previously published by
Southern Book Publishers
First edition 1989
Cover design by Alix Gracie
Set in 9 on 11pt Times New Roman
Typesetting by Unifoto (Pty) Ltd, Cape Town
Printed and bound by Ultra Litho (Pty) Ltd
Contents
Direct current machines
1.1 The emf equation
1.2 Armature reaction
1.3 Commutation
1.4 Charactensticcurvesofd.c. generators
1.5 Direct current motors
Alternating current circuit theory
2.1 Non-sinusoidal and sinusoidal waves
2.2 Resonance
2.3 Series parallel circuits
2.4 Balanced three-phase systems
1
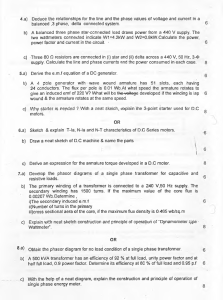
3
4
9
16
28
30
35
37
3. Measurement of power in a three-phase
system
3.1 The one-wattmeter method
46
3.2 The two-wattmeter method
46
3.3 The three-wattmeter method
48
3.4 Wattmeter connections with instrument
transformers
48
Transformers
4.1 Theory and performance
4.2 Voltage regulation
4.3 Methods of reducing leakage flux in a
transformer
4.4 Parallel operation of transformers....
50
55
57
58
Alternating current machines
5.1 Types of a.c. armature windings
62
5.2 The emf equation of an alternator.... 63
5.3 Parallel operation of alternators
64
5.4 The synchronous motor
67
5.5 Rotating fields produced by three-phase
windings
68
5.6 Polyphase induction motors
70
6. Generation and supply of a.c. power
6.1 Resistance of overhead lines
6.2 Inductance of overhead lines
6.3 Capacitance of overhead lines
6.4 Transmission line calculations
76
76
77
78
1. Direct current machines
1.1
The emf equation
Let P = pairs of poles
a = pairs of parallel paths
0 = flux per pole in webers
Z = total number of armature conductors
emf induced in conductor
= webers cut per second
Wb cut per second by l conductor in l r.p.s.
= 2P</>
emf induced in l conductor in l r.p.s.
= 2 P 0 volts
emf induced in l conductor in n r.p.s.
= 2 P $ n volts
emf induced in Z conductors in n r.p.s.
= 2/ > 0nZvolts
But this is not the actual emf available at the brushes
of the machine, since there are 2a paths through the
armature.
N
conductor 0 I 11111 j I I
M 11 111'
f M I' U
FIG. 1.1
Example 1.1
A four-pole wave-wound generator delivers 50 kW
at 400 V. The armature has 302 conductors and a
resistance of 0,01 fi. If the shunt field resistance is
60 fl and the flux per pole is 0,02 Wb, determine
the speed of the machine.
•'• The emf induced in Z conductors in n r.p.s.
=
—
2a
h
I,
volts
400 V
'o,oi n
6 nZ volts
FIG. 1.2
Note:
• In a lap-wound armature a = P.
• In a wave-wound armature a = 1.
• Emf is the voltage at the terminals of a machine
when the external load is disconnected.
• P.d. is the voltage at the terminals of a machine
when the external load is connected, causing a volt
drop (/„/?„) in the armature.
• For a generator: E — V + IaRa
and /„
IL+
I,f
E
• For a mot, :
I„R„
and /0 = IL - If
Solution
400
60
//
= 6,67 A
kW X 1 000
V
50 X 1 000
400
125 A
//+ h
6,67 + 125
131,67 A
P= 2
60 n
of 1 250 r/min. The armature resistance is
0,15 H and the field resistance 125 ft. The brush
contact drop is 2,4 V. If the terminal voltage is
maintained at 500 V, calculate the current supplied to the load.
(80 A)
A six-pole, 3 000 V d.c. wave-wound series
motor has a full-load output of 200 kW. Its
efficiency at full load is 84 per cent and the
resistance of the combined armature and field
circuit is 0,75 ft. Calculate the speed of the
motor at full load if there are 1 800 armature
conductors and a useful flux of 0,042 Wb per
pole.
(12,96 r/sec)
A
six-pole,
wave-wound
armature
has 351 con4.
ductors. The shunt field winding has a resistance
of 100 ft and produces a flux of 0,012 Wb per
pole when 2 A flows through it. The armature
has a resistance of 0,2 ft. Calculate the speed at
which it will have to be driven as a generator
delivering 48 A at 200 V to an external load.
(16,6 r/sec)
p.d. + IaRa
400 + 131,67 X 0,01
400 + 1,32
401,32V
E
%
a
401,32
2 X 0,02 X 7i X 302
401,32
2 X 0,02 X 302
33,2 r/sec
n
nZ
Exercise 1.1
1. A four-pole motor takes an armature current of
123 A from a 220 V supply. Its armature is
simple lap-wound with 48 slots, 6 conductors
per slot, the flux per pole is 0,065 5 Wb. Determine the speed of the machine. The resistance
of the armature is 0,12
ft.
(10,8 r/sec)
2. A six-pole d.c. shunt generator has a wavewound armature with 412 conductors. The flux
per pole is 0,02 Wb, and it is driven at a speed
geometric neutral
A
(a)
B
A
(b)
(c)
FIG. 1.3
2
parallel to the flux and generating no emf when
they are passing axis CD.
The armature ampere turns can be divided into two
groups:
• Those due to conductors in angles COE and
FOD, shown in Fig. 1.4. From the figure it is
obvious that these conductors are carrying current
in such a direction as to set up a flux in opposition
to that produced by the field winding, and their
effect is to reduce the flux through the armature.
Hence the ampere turns due to these conductors
are referred to as demagnetising or back ampere
turns.
• Those due to conductors in angles COF and
EOD, shown in Fig. 1.4. The ampere turns due to
the current in these conductors are responsible for
the distortion of the flux and are therefore termed
the distorting or cross-magnetising ampere turns.
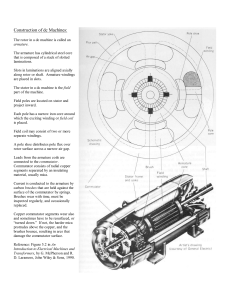
1.2 Armature reaction
The armature reaction is the effect of armature
ampere-turns upon the value and distribution of
the magnetic flux entering and leaving the armature
core.
Fig. 1.3(a) shows the distribution of flux when
there is no armature current, the flux density in the
airgap being practically radial and uniformly distributed.
Fig. 1.3(b) shows the distribution of flux set up by
current flowing through the armature winding in
the direction that it will actually flow when the
machine is loaded as a generator. It will be seen
that at the centre of the armature core and in the
pole shoes the direction of the flux is at right angles
to that due to the field winding, hence the reason
why the flux due to the armature current is termed
the cross flux.
Fig. 1.3(c) shows how the flux is distributed when
the fluxes in Figs. 1.3(a) and (b) are combined.
Over the leading halves of the pole faces, the cross
flux is in opposition to the main flux, thereby
reducing the flux density, whereas over the trailing
halves, the two fluxes are in the same direction, so
that the flux density is strengthened. Apart from
the effect of magnetic saturation, the increase of
flux over one half of the pole face is the same as the
decrease over the other half, and the total flux per
pole remains practically unaltered. Hence the effect
of armature reaction is to twist or distort the flux in
the direction of rotation.
One important consequence of this distortion of the
flux is that the magnetic neutral axis (M.N.A.) is
shifted through an angle 0 from AB to CD; in other
words, with the machine on no load and the flux
distribution of Fig. 1.3(a), conductors are moving
parallel to the lines of force and therefore generating
no emf when they are passing axis AB. When the
machine is loaded as a generator and the flux distorted as in Fig. 1.3(c), conductors are moving
1.2.1 Calculation of demagnetising and
cross-magnetising ampere turns
Let Z
a
P
4
8
=
=
=
=
=
=
total number of armature conductors
pairs of parallel paths
pairs of poles
total armature current
brush shift in electrical degrees
P X brush shift in angular degrees
Current per conductor
Conductors per pole
L
2a
IP
Since two conductors constitute one turn, the number of armature ampere turns per pole is:
1
2
X
/
la
X
7
2>
From Fig. 1.4 it can be seen that for every 360
electrical degrees there are 4 0 degrees containing
3
conductors that are responsible for the demagnetising ampere turns.
=
_
"
Cross-magnetising AT's per pole
=v>*
Z
X (1 - ±8
2>X
laX
360;
56,5 x 8 4 6
4 X 7,68
X (1
4
~2
360
= 3 000 (l -- 0,085 5)
= 2 74CI
Number of demagnetising ampere turns per pole
40
total AT's/pole X
360
1 / Z 4 0
2 X la X IP X 360
= ix
And since all the armature ampere turns which do
not produce demagnetisation are responsible for
distortion of the flux,
Exercise 1.2
1. A 300 kW, 500 V, eight-pole d.c. generator has
768 armature conductors, lap-wound. Calculate
the number of demagnetising and cross-magnetising ampere turns per pole, when the brushes
are given a lead of five electrical degrees from
the geometric neutral. Ignore the effect of shunt
current.
(200; 3 400)
2. A six-pole d.c. shunt generator delivers 200 kW
on full load at 600 V. It has 560 conductors on
the lap-wound armature and 280 commutator
segments. Ignoring the shunt field current, calculate the demagnetising and cross-magnetising
ampere turns per pole on full load if the brushes
are given a lead of three commutator segments.
(333; 2 259)
3. A 400 kW, 400 V, six-pole d.c. generator has
576 armature conductors, lap-wound. Calculate
the number of demagnetising and cross-magnetising ampere turns per pole when the brushes
are given a lead of four electrical degrees from
the geometric neutral. Ignore the effect of shunt
current.
(356; 7 644)
4. A four-pole d.c. motor has a wave-wound
armature with 888 conductors. The brushes are
displaced backwards through five angular degrees from the geometrical neutral. If the total
armature current is 90 A, calculate:
(a) the cross and back ampere turns per pole;
(555; 4 440)
(b) the additional field current that will be
needed to neutralise the demagnetising effect, if
the field winding has 1 200 turns per pole.
(0,462 5 A)
5. A generator has a four-pole wave-wound armature with 123 segments and 738 conductors. If
the brushes are given a lead of two commutator
segments and the armature current is 50 A,
calculate the cross-magnetising and demagnetising ampere turns per pole. (299,8; 2 006,4)
the number of cross-magnetising ampere turns per
pole
=
total AT's/ pole - demag. AT's/ pole
1
2
X !° X
X
x
Z
X
•
2X2O~X2PX
2a TP
x (1
i £ i
360
40
360
Example 1.2
A 22,4 kW, 440 V, four-pole d.c. motor has an
armature wave-wound with 846 conductors, and
the commutator has 141 segments. The full-load
efficiency is 88 per cent and the shunt current is 1,2
A. If the brushes are shifted backwards through
lj segments from the geometric neutral, calculate
the demagnetising and cross-magnetising ampere
turns per pole.
P - 2
a = 1
kW = VX h
1000
22,4 X 1 000
4 =
440
= 57,7 A
= 57,7 - 1,2
= 56,5 A
141 segments = 360°
1 segment = 360°
141
1^ segments
_ 360
X 1,5
141
= 3,84 X 2
3,84° (mechanical)
7,68° (electrical)
Demagnetising AT's per pole
48
X
IP
360
la
56,5 X 846 X 4 X 7,68
4
360
2
-!x k
2X
255
X
1.3
Commutation
When a coil passes from one side of a brush to the
other the commutator segments connected to the
4
ends of the coil are bridged or short-circuited by the
brush. During this very short period the current in
the coil has to be reversed. Commutation means
the changes that take place in the coil during the
period of short-circuit. For no sparking when the
segment leaves the brush, the current must have
reached its correct value in the reverse direction at
the instant of parting contact.
We will now consider the change of current in a coil
B as shown diagrammatically in Fig. 1.5. For simplicity, it is assumed that the current in one coil
only undergoes commutation at a brush at any
instant. It is further assumed that the current in a
coil before reversal is equal to /amperes.
FIG. 1.5(c): End of short-circuit.
On studying the figures it will be seen that in
Fig. 1.5(a) the coil B is about to be short-circuited
and the current /flows through the coil from left to
right.
In Fig. 1.5(b) the coil is in the middle of the period
of short-circuit and no current flows through it.
In Fig. 1.5(c) the coil is at the end of short-circuit
and the current / flows from right to left. Thus the
current in coil B is now flowing in the opposite
direction to that shown in Fig. 1.5(a).
On the assumption that the distribution of current
simply depends on contact resistance and that no
emPs are induced in the short-circuit element, it will
be apparent that the current, / amperes, first flows
from left to right in the element and decreases at a
uniform rate to zero value at the middle of shortcircuit. The current then reverses and increases at a
uniform rate from zero to a maximum. Thus there
is no sparking when the segment b leaves the brush.
These assumptions are difficult to realise in practice,
mainly owing to the fact that when the current
reverses from full value in one direction to full
value in the opposite direction, two important
factors tend to prevent smooth commutation:
FIG. 1.5(a): Beginning of short-circuit.
A
B
C
• a possible high current in the coil undergoing
short-circuit, and
• the inductance property of the alternating current
in the coil, which opposes a reversal of current.
Note that the current must change from full value
in one direction to full value in the reverse direction
in an extremely short time. The inductance property
of a coil containing several turns of wire and wound
around good magnetic material tends to oppose
such reversal, and this property gives rise to a voltage as a result of the inductance. It is called static
reactance voltage, because it reacts to oppose a
FIG. 1.5(b): Middle of short-circuit.
5
change of current from + / to —/. It is this voltage
that is responsible for delaying the reversal of the
current in the short-circuit coil. The result is that
when segment b is due to break contact with the
brush, as in Fig. 1.6, the current in coil B grows to
some value, (', and the remainder, namely (/ —i),
has to pass between brush and segment b in the
form of an arc.
A
B
a
C
b
c
arc
FIG. 1.6
Thus most methods of reducing sparking are
directed towards reduction or neutralisation of the
reactance voltage. If this reactance voltage is permitted to act, it will cause sparking, even though
interpoles are used. To offset this reactance voltage,
it is necessary to do one of two things:
• shift the brushes, in non-interpolar machines,
beyond the load magnetic neutral, so that a voltage
will be generated in the coil in the direction in
which the current is about to flow, or
• strengthen the interpole more than would be
necessary to neutralise the armature reaction flux,
so that a voltage will be generated in the shortcircuit coil in the direction in which the current is
about to flow. In other words, in anticipation of the
new current direction, reactance voltage is neutralised by making a coil generate enough emf to help
the current reverse effectively and smoothly. This is
why interpoles are always stronger than would be
necessary just to overcome the armature reaction
flux, and why brushes, when shifted, are moved a
little beyond the exact magnetic neutral.
1.3.1 Methods of improving commutation
• By increasing the brush contact resistance
It is evident that if the brush contact resistance is
made low, for example by using copper gauze
brushes, a large current will flow from the leading
segment to the brush, even when the area of contact
has decreased to a very small value. This means
that the current density becomes very high and an
arc is easily formed as the segment leaves the brush.
By the use of carbon brushes the contact resistance
is considerably increased and commutation greatly
improved.
• By shifting the brushes forward in a generator
and backward in a motor
If the brushes of a generator were moved forward
to the magnetic neutral zones, the short-circuiting
coils would not be generating any emf and the
reversal of the current in the short-circuited coil
would then be sparkless. The disadvantage of this
method is that for best commutation the brushes
have to be shifted for every variation of load.
• Increasing the reluctance between the pole tips
and the surface of the armature core
This reduces the armature reaction flux in the
interpolar zones, where the coil sides must cut no
flux if sparkless commutation is to result. Fig. 1.7
shows how this is done by using chamfered pole
shoes and Fig. 1.8 by employing pole laminations
with one pole tip (in assembling the laminations,
the pole tips are alternated from one side to the
other, so that the cross-sectional area of the iron is
half as much under the pole tips as under the centre
section).
• Interpoles
These are narrow poles placed exactly halfway between the main poles and directly in line with the
no-load magnetic neutral. The exciting windings
for these poles are always permanently connected
in series with the armature because interpoles must
produce fluxes that are directly proportional to the
armature current. The armature and interpole emfs
are thereby affected simultaneously by the same
armature current, with the result that the armature
flux in the commutating zone, which tends to shift
the magnetic neutral, is neutralised by an appropriate component of interpole flux; the neutral
plane is therefore fixed in position regardless of
load.
Referring to Fig. 1.9(a), note that the armature mmf
creates a field vertically downwards. Since the part
of this field that is detrimental to good commutation is in a narrow zone between lines aax and bb',
it should be clear that poles located in this area and
creating an mmf of the proper value will counteract
the effect of armature reaction. Note that in Fig.
1.9(b) the interpolar zones are free of magnetism.
This condition will occur at all loads if the number
of turns on each interpole is properly chosen, since
the current is common. One additional significant
short air gap
long air
FIG. 1.7: Chamfered pole shoe.
FIG. 1.8: Area of pole tip reduced.
fact is that interpoles act only in the interpolar
zones. They can have absolutely no effect upon the
armature mmf that distorts the main field, which is
called the cross-magnetising effect, and can effect
the operation of a loaded generator only slightly
under average conditions. In some large machines,
and in those in which load fluctuations are violent,
the cross-magnetising action can become severe
enough to cause flashover between positive and
negative brushes.
• Compensating windings
These are used for the purpose of neutralising the
effect of armature reaction in the zones outside the
influence of the interpoles and particularly to maintain a uniform flux distribution under the faces of
the main poles. They are special windings placed in
slots or holes in the pole faces and carry, as do the
interpoles, the total armature current. Half of the
conductors on the right side of a pole face, for
example, are joined in series to half of the conductors on the left side of the adjoining pole face, in
such a manner that the directions of the currents in
these conductors are opposite to those in the conductors in the armature winding directly below.
interpole
a' b
FIG.1.9(b)
FIG. 1.9(a)
7
ding
FIG. 1.10: Compensating winding and relative directions of currents in pole-face conductors and
armature conductors.
Since the compensating winding carries the total
armature current, it is much more effective in producing flux per turn than in each armature winding
turn. Remember that the current per path in the
armature winding is equal to the total armature
current divided by the number of paths. In the
actual design of compensating windings, only those
conductors in the armature winding directly opposite the pole faces are neutralised by an equal number of ampere turns. The interpoles, which such
machines always have to take care of the armature
reaction, effect in the interpolar zones.
Ia X No. of conductors — 261 X 96
4 170 X No. of conductors = 261 X 96
261 X 96
No. of conductors per pole ~
4 170
6 conductors per pole
Example 1.4
An eight-pole d.c. motor has a lap-wound armature
with 768 conductors. The armature current is 600 A.
Assuming that the ratio of the armature ampere
turns per pole to the interpole ampere turns per
pole is 0,75, determine the number of turns per pole
required for the interpole.
Example 1.3
A 2 500 kW, 600 V, 16 pole generator has a lapwound armature with 2 360 conductors. If the pole
faces cover 65 per cent of the entire circumference,
calculate the number of pole-face conductors in
each pole of a compensating winding.
h =
P = 8
a = 8
l.s
. 2 500 X 1 000
600
Current per conductor
Solution
P
a
Z
L
4 170 A
k.
4
4
768
600
600
Current per conductor — I~ =
2
X 4
2a
75 A
768
Z _=
Armature conductors per pole = —
IP
2X4
96 (assuming
pole arc
_
pole pitch
75 v 96
Armature ampere turns per pole =
4 170
la
2
261 A
Armature conductors under each pole
2 360 X 0,65
=
— 96
16
= 3 600
Armature ampere turns per pole
= 0,75
Interpole ampere turns per pole
3 600
= 0,75
600 X No. of turns
Ampere conductors per pole on compensating
winding must balance ampere conductors per pole
on armature. (Ampere conductors on compensating
winding = ampere conductors on armature.)
8