iC-MHL200 - iC-Haus
advertisement

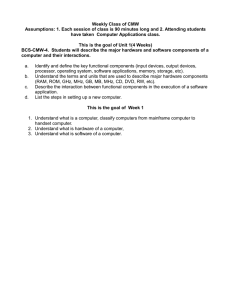
iC-MHL200 12-BIT linear / rotary Position Hall Encoder The iC-MHL200 is an integrated Hall encoder for sensing linear and rotary magnetic targets with a 2 mm pole pitch. A smallest linear position increment of 1 µm can be achieved when the device is operated at 12 bit resolution. The interpolator resolution can be programmed up to a maximum of 4096 increments per magnetic signal period (equivalent to a 4 mm position shift). Incremental ABZ quadrature position signals up to a rate of 2 MHz are available on single-ended or differential outputs, permitting at least a linear speed of 8 m/s at 12 bit resolution, and even higher velocities at a reduced resolution. The position of the index pulse Z is adjustable within the magnetic signal period. For linear motor applications, one and twofold UVW commutation signal over a signal period are available. Both incremental and commutation outputs are RS422 compatible and can be configured regarding output drive current and slew rate. Using the serial BiSS interface position data can be transmitted and iC-MHL200 can be accessed for setup. The power-on configuration and internal parameters can then be stored permanently in an on-chip zapping ROM. For position data readout only, the SSI protocol is also available. + 5V Adjustment, air gap B S B B • • • • • • • • • • • • • • Automatic signal conditioning with configurable control 12-bit real-time interpolation at 8 m/s velocity Interpolation factors ×1 to ×128, ×256, ×512, ×1024 Quadrature AB and index Z signal outputs Z output can be enabled via strobe input ENZ One and twofold UVW commutation signals Independent zero position for ABZ or UVW Incremental AB frequency of up to 2 MHz RS422 output driving stages for ABZ and UVW BiSS C interface for position readout and programming Device setup and OEM data stored into OTP ZAPROM Open-drain NERR signal (loss of magnet, frequency error) Error codes accessible via BiSS C interface Operating temperature range of -40 °C to +125 °C Applications • • Incremental linear and rotary encoders Electronic commutation of linear motors + 5V VPD ENZ GAIN VPA Index enable Features B N CONVERSION LOGIC HALL SENSORS (manufacture purpose only) weak magnetic field, frequency error A A B B Z Z SINE-TO-DIG RS422 PTE TEST 2 SIN + COS U 2 AMPLITUDE CORRECTION NERR 0x00 MA SINE-TO-COM 0x77 0x7F RAM VNA W 240° W INCR INTERFACE Internal HALL sensor signals (available in Test Mode) PSIN NSIN 2V 16 Byte ZROM 0x1F SERIAL INTERFACE 120° V iC-MHL200 0x0F 0x10 SLO SLI AMPL CONTROL PHASE SHIFT 1x and 2x commutating signals 0° U V ERROR MONITOR Data, Programming Interpolating factors 1...128, 256, 512, 1024 BIAS/VREF VND ZAP CONTROL ZAPROM VZAP Programming Voltage PCOS NCOS 0 (0°) Am Kuemmerling 18 • D -55294 Bodenheim, Germany Tel. +49 61 35 / 92 92-30 0 • Fax +49 61 35 / 92 92-19 2 • http://www.ichaus.com 2 Linear position 4 [mm] (360°) iC-MHL200 12-BIT Linear / Rotary position hall encoder Key Specifications Pin Functions General No. Name Function Supply Voltage 5 V +/-10 % 1 SLI Serial Interface, Data Input Supply Current, normal mode power reduction mode 24 mA max. 16 mA max. 2 MA Serial Interface, Clock Input 3 VPA +5 V Supply Voltage (analog) Linear Speed (@ 12 bit) 8 m/s 4 VNA Ground (analog) Magnetic Field Strength 20 ... 100 kA/m 5, 6 nc not connected Resolution (digital / linear) 12 bit / 1 µm 7 VZAP Zener Zapping Programming Voltage Operational Temperature Range -40 to +125 °C 8 A Incremental Output A (+NU) ESD Susceptibility 2 kV (HBM 100 pF, 1.5 kΩ) 9 B Incremental Output B (+NV) 10 Z Index Output Z (+NW) 11 VND Ground (digital) 12 VPD +5 V Supply Voltage (digital) 13 U Commutation Output U (+NA) 14 V Commutation Output V (+NB) Operating Modes Output Modes ABZ and UVW ABZ and inverted ABZ UVW and inverted UVW ABZ and AB period signals Interpolation Factors ×1 ... ×128, ×256, ×512, ×1024 @ A, B 15 W Commutation Output W (+NZ) Commutation Signals UVW one and two periods every 360° 16 PTE Test Enable Input 17 NERR Error output (active low) 18 GAIN Gain Signal 19 ENZ Index Z Enable Input 20 SLO Serial Interface, Data Output Output Driver Settings Drive Modes push-pull (RS422), high-side, low-side, tristate Driving Capability (driving current, rise/fall time, frequency) +/- 4 mA, 12 ns, 10 MHz +/- 60 mA, 12 ns, 10 MHz +/- 60 mA, 200 ns, 300 kHz +/- 20 mA, 20 ns, 3 MHz Application Example rotating target Signal Conditioning controlled to 2 Vpp ×5, ×10, ×15, ×20 ×1 ... ×19 (64 steps) 0.91 ... 1.097 (128 steps) +/- 63 mV in steps of 1 mV 0.17°, 0.35°, 0.7° and 1.4° adjustable in increments of 1.4° adjustable in increments of 1.875° index track incremental track 0 enable L2 0 Internal Hall Signal Level Coarse Gain Selection Fine Gain (AGC range) Sin/Cos Amplitude Ratio Offset Correction Range Hysteresis ABZ Zero Position ABZ Zero Position UVW SSI Mode data output to 2 MHz, 13 bit format BiSS Mode 10 MHz, register access, CRC M H Serial Interface Output index sensor Pin Configuration TSSOP20 13 12 D VN 14 VP D 15 16 U W 17 V ER R PT E 18 N AI N Z 19 G 20 EN SL O A 11 B Z ENZ MHL200 M H L2 00 Code... incremental track ...yyww 7 8 9 10 Z 6 A 5 n. c. VZ AP 4 c. 3 n. A M SL I 2 VP A VN A 1 B index track 0 absolute position This preliminary information is not tantamount to a guarantee of device characteristics. All rights to technical changes reserved. Am Kuemmerling 18 • D -55294 Bodenheim, Germany Tel. +49 61 35 / 92 92-30 0 • Fax +49 61 35 / 92 92-19 2 • http://www.ichaus.com Rev. 1.0