Performance Analysis of a DFIG based Variable Speed Wind Energy
advertisement

Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
Performance Analysis of a DFIG based Variable
Speed Wind Energy Conversion System
J. P. Mishra,
Department of Electrical Engineering,
National Institute of Technology Silchar
Silchar, India,
Email: jpm.nits@gmail.com
NOMENCLATURE
Vgabc =Three phase grid voltages [V]
Vgcabc =Three phase grid-side converter voltages [V]
iga, igb, igc = Three phase grid-side converter currents [A]
Rg and Lg = Inductor resistance [Ω] and inductance [H]
idcg ,idcr = Grid-side and rotor-side DC currents [A]
C = DC-link capacitor [F]
Vgcd & Vgcq=grid side converter voltage in d & q axis
igd & igq=grid side converter current in d & q axis
ωe=Rotational speed of the grid voltage (elec. Rad/sec)
ψαs&ψβs = Stationary αβ -axis stator fluxes [Wb]
Vαs &Vβs = Stationary αβ-axis stator voltages [V]
iαs &iβs = Stationary αβ-axis stator currents [A]
ωs = Electrical angular velocity of the stator flux [rad/s]
Vs =Magnitude of the stator phase voltage [V]
Vgd & Vgq=Gird dq- axis voltages
ψs=Magnitude of the stator flux linkage [Wb]
ims =Magnetising current [A] of the generator
Vabcr* = Reference values of the 3-ɸ rotor voltages [V]
Vrd*, Vrq* = Rotor d- and q-axis reference voltages [V]
ird*, irq* = Rotor d- and q-axis reference currents [A]
ωr = Generator speed (rad/s)
ωt =Blade turbine (rad/s)
Tm= Mechanical Torque (N-m)
Prated= Rated power (watt)
R = Blade radius of the wind turbine (m)
Vw = Wind speed at the centre of the rotor blade (m/sec)
ρ = Air density (Kg/m3)
A = Blade swept area of the wind turbine (m2)
Ew = Kinetic energy of wind
Cp = Power coefficient of wind turbine
=Tip Speed Ratio
I. INTRODUCTION
Against the backdrop of increasing awareness of the
effects of global warming due to greenhouse gas emissions
and with fossil-fuel prices on the rise and their availability
becoming increasingly unreliable, the need for more
environmental friendly electric power system has become the
thrust area of energy research for sustainable growth of
technology. To address security of supply and energy
diversification, renewable energy sources are regarded the
most attractive front-line of the world’s energy challenges.
Among a variety of renewable energy sources, wind energy is
the most rapidly growing one in the power industry as it is
cost competitive, environmentally clean, fuel free (produces
no CO2), freely available and safe renewable power source as
compared to fuel and nuclear power generation.
Now-a-days, Doubly Fed Induction Generator (DFIG)
system, comprising of a slip-ring induction generator, a backto-back AC-DC-AC electronic converter and a common DClink capacitor has become one of the most popular wind
generator systems. The back to back AC-DC-AC voltage
source converter has two main parts: grid side converter
(GSC) to rectify grid voltage and rotor side converter (RSC) to
feed controllable voltage to the rotor circuit of DFIG [1].
Power electronics converter processes only the slip power.
Therefore it is designed in partial scale, for just about 30% of
generator rated power [2]. This causes reduction in converter
cost, injection of less harmonics to the grid, improves overall
energy conversion efficiency [3]-[6] and further, there exists
scope for independent control of active and reactive powers.
The DFIG control is accomplished traditionally by
proportional and integral controllers (PI controllers), which
have a simple structure and also present a reasonably robust
performance. However the success of the PI controller, and
consequently a better system performance depend on an
appropriate choice for the gains. Many different structures and
control algorithms can be used for control of power electronics
converter. One of the most common control techniques is
decoupled PI control of output active and reactive power to
improve dynamic behavior of wind turbine. But, due to
uncertainty about the exact model and behavior of some
parameters such as wind, wind turbine, etc and also variation
of parameter values during operation because of variations in
temperature, events or unpredictable wind speed, tuning of PI
29
Abstract: This paper presents the performance study of a DFIG
based variable speed wind energy conversion system (WECS)
using pole placement technique. Independent control of active
and reactive power exchange between the stator of the DFIG and
the grid has been achieved to ensure maximum power point
tracking (MPPT) mechanism of a WECS. Vector control based
sinusoidal PWM scheme using pole-placement technique is
incorporated with an optimal speed tracking controller for
maximum energy capture in the rated wind speed range and
restrict the mechanical output power to the rated value using
pitch angle control when the wind velocity crosses rated limit to
prevent overloading and outage of the wind turbine. Simulation
has been carried out in MATLAB/simulink environment and
results have been analyzed. Results show that the DFIG based
wind turbine can operate at its optimum energy for a wide range
of wind speed and it can also control active and reactive power
independently.
Keywords-Doubly Fed Induction Generator (DFIG), Rotor Side
Converter (RSC), Grid Side Converter (GSC), Pole Placement
Technique, WECS and MPPT etc.
A. K. Roy,
Department of Electrical Engineering
Tripura Institute of Technology Narsingarh
Agartala, India,
Email: anjan_kumarrroy@rediffmail.com
Page
Subir Datta,
Department of Electrical Engineering
Mizoram University, Aizawl,
Mizoram, India,
Email: subirnerist@gmail.com
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
parameters is one of the main problems in such control
method.
In the present work, pole-placement method [7, 8, 9, 10,
11, and 12] is used, for its straightforwardness and simplicity,
to design PI-controllers in current control loops and power
control loops. Initially, a circuitry simulation model of a
1.5MW variable wind turbine with a DFIG is developed in
MATLAB/Simulink. The paper is organized as follows:
Section II, III and IV presents, modeling and control of the
DFIG Wind turbine, vector control of the DFIG Wind turbine
and Pole placement controllers design respectively. Simulation
results are shown in section V. Finally, conclusions are drawn
in section VI.
II. MODELLING AND CONTROL OF THE DFIG WIND TURBINE
medium range, by following the maximum value of the wind
power coefficient (Cp_max), as depicted in Fig-3. The
mechanism for MPPT of the wind turbine is coded on
MATLAB/Simulink
Embedded-MALTAB
function
environment and is explained in the flow chart shown in Fig-4.
Fig-2 Cp Vs
for different β
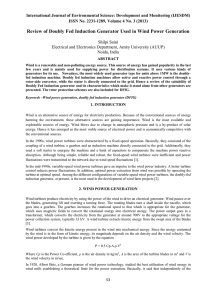
Fig-1 shows the basic structure of a DFIG-Wind Turbine
system. DFIG is a wound rotor Induction Machine. Its stator
terminals are directly connected to the grid, while the rotor
terminals are connected to the same grid, but via a PWM backto-back converter which consists of rotor side converter (RSC)
and a grid side converter (GSC) [13]. The wind turbine is
mechanically coupled to the shaft of DFIG's rotor via gear.
Fig-3 Power Vs Rotor Speed
idcr
idcg
i dc
C
Fig-1 Structure of the DFIG based wind system.
A. Modelling of the Wind Turbine
The mechanical power Pm captured by the turbine from
the wind for a given wind speed (Vw) is computed by the
following expression [14]-[15]:
Pm
1
( E w ) * C p V w3 C p
t
2
(1)
Where Cp is the turbine power co-efficient and is a
nonlinear function of the
and the pitch angle β and can be
computed as follows [14] [16]:
i
0.0068
(2)
1
1
0 .0 3 5
3
0 .0 8
1
Since Cp= f ( , β), the plot of Cp Vs at various values of β
is shown in Fig-2. For β equal to zero the maximum Cp value
is bounded according to Betz’s limit. In Fig. 3 shows the
amount of electrical power developed at different rotor speeds
(produced at different wind speeds).
B. Maximum Power Point Tracking (MPPT)
The objective of the MPPT mode of operation is to extract
maximum possible power at different wind speeds, in low to
Fig-4 Maximum power point Tracking
C. Pitch Angle Controller
When the wind velocity increases beyond the rated value,
the electromagnetic torque and hence rotor speed becomes too
high to control. To restrict rotor speed from becoming too
high, the extracted power from incoming wind is restricted to
its rated value by reducing the power coefficient (Cp value)
using pitch angle control, as shown in Fig-2.
The mechanism for blade pitch angle control of the wind
turbine is coded on MATLAB/Simulink S-function
environment and explained in the flowchart shown in Fig-5.
D. Modelling of the DFIG
A DFIG has several advantages over conventional Induction
30
Where,
21
i
Page
116
C p 0.5176
0.4 5 e
i
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
Machine in wind power applications [17]. The operating
principle of a DFIM can be analyzed using the classical theory
of rotating fields and the well-known d-q model, involving
both three-to-two and two-to-three phase axes transformations
[18]. The equations for voltages and fluxes, in the arbitrary d-q
reference frames, are [18]:
d
sd
dt
d
sq
dt
d
rd
dt
d
rq
dt
V sd R s isd
V sq R s isq
V rd R s isd
V rq R s isq
sd
r rq
r rd
A. Vector-Control scheme of GSC
Grid-voltage-oriented vector control approach is used for GSC
to achieve independent control of active power between grid
and DC link (using d-axis current, for maintaining constant
dc-link voltage Vdc) and reactive power between the grid and
grid-side converter (using q-axis current). Fig-6 shows the
schematic of the grid-side PWM voltage source converter.
sq
(3)
The flux linkages are given by:
sd Ls isd Lmird
sq Ls isq Lmirq
rd Lr ird Lmisd
rq Lr irq Lmisq
Fig-6 Grid-side PWM voltage source converter
(4)
The voltage balance across the inductor
V
V
i
i
V =R i +L
i
+ V
(7)
i
i
V
V
Using the abc-to-dq transformation matrix, the corresponding
equation in the dq-reference frame, rotating at we is
V
=R i
+L
−w L i
+V
(8)
V =R i +L
+w L i +V
(9)
The active (Pg) and reactive (Qg) power flow between the grid
and GSC can be given by [7]
P = (V i + V i )
(10)
Q = (V i − V i )
(11)
The angular position θe of grid voltage is calculated as
θ = ∫ w dt = tan
III. VECTOR CONTROL OF THE DFIG WIND TURBINE
The Vector control of wind turbine coupled DFIG is achieved
by controlling RSC and GSC. RSC is controlled for getting
independent control of active power Ps and reactive power Qs
of the stator. GSC is controlled for maintaining constant dclink voltage Vdc and to regulate exchange of reactive power Qg
between GSC and grid [19].
Q =− V i
(14)
B. Vector-Control Scheme of RSC
The RSC of DFIG is controlled in synchronously rotating dqaxis frame, with d-axis oriented along stator-flux vector
position, shown in Fig-7(b). The PWM voltage source
converter is current regulated with the d-axis current used to
regulate the stator reactive power and q-axis current used to
regulate the stator active power.
The stator fluxes and angular position θs is calculated [7] as
31
The electromagnetic torque developed by the DFIG can be
expressed as:
3 p
(5)
T e m s d * i s q s q i s d
2 2
The active and reactive stator power can be expressed as [7]:
P = V i +V i
(6)
Q = (V i − V i )
where Vgα and Vgβ are the stationary dq-axis grid voltage
components. By aligning d-axis of reference frame along grid
voltage position, expressed by (12) and shown in Fig-7a, Vgq
is made zero which results Vds equal to the amplitude of the
grid voltage, a constant. Under such circumstances, from (10)
& (11), the active and reactive power flow between the grid
and GSC become proportional to igd and igq respectively. Fig-8
shows the vector control scheme employed for grid side PWM
voltage control converter.
P = V i
(13)
Page
Fig.5 Pitch angle controller (S-function modeling)
(12)
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
s
s
s
V
V
s
s
R s i s d t
s
R s i s d t
d t ta n 1
s
s
irq ( s )
ird ( s )
1
k
'
V rd ( s )
V r 'q ( s )
L r s rr
s p
(15)
Aligning the d-axis of the reference frame along stator-flux
vector position, shown in Fig-7b, ψqs is made zero which
results the DFIG model [7] as:
V = 0;
V =V =w Ψ
⎫
V = R i + σL
− w σL i
⎪
⎪
⎪
V = R i + σL
+ w (L i + σL i )
(16)
Ψ =Ψ =L i =L i +L i
⎬
⎪
0=L i +L i , Ψ =
i + σL i
⎪
⎪
Ψ = σL i
⎭
where, w = w ; w = w − w ; σ = 1 −
and L =
The stator-side active Ps and reactive Qs power flow
components become
P =− ( Vi )
(17)
Q = V(
−
i )
(20)
Assuming ideal decoupling between the d- and q-axis currents,
the current control loop can be given as shown in Fig-10. The
open-loop transfer function of the current control loop is
k pc k ( s a ic )
(21)
G (s)
s(s p)
Choosing
aic p ; we get G ( s )
k pc k
(22)
s
The closed-loop transfer function becomes
k pc k
G (s)
1 G ( s ) s k pc k
(23)
This is a first order system and the bandwidth of the first
order system is,
(24)
n k pc k
(18)
For constant stator voltage, Vs the stator-side active and
reactive powers are directly proportional to iqr and idr
respectively. Fig-9 shows the vector-control scheme for PWM
rotor side voltage source converter.
IV. POLE PLACEMENT CONTROLLERS DESIGN
The pole placement technique is a formal technique used
to design PI controllers, based on the knowledge of the plant
transfer function. The objective of the technique is to design
controllers that will result in specified pole positions for the
closed loop system. In the present work, pole-placement
method [7] is used for designing PI-controllers in current
control loops and power control loops of RSC and GSC, for its
straight forwardness and simplicity.
Fig-8 Vector-control structure for GSC
Fig-9 Vector-control structures for RSC
Page
A. PI-Current Controllers for RSC & GSC
Applying Laplace Transform to equations (8, 9 & 16), the
plant transfer function for the current control loops of GSC
and RSC can be written as [7]:
i gd ( s )
i gq ( s )
1
k
(19)
'
'
V gd ( s ) V gq ( s )
Lg s Rg
s p
32
Fig-7 Vector diagram showing the alignment of dq-reference frame for a)
GSC and b) RSC
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
Fig-12 Cascade reactive power control loop
The relationship between the bandwidth and the rise time (1090%) for a first order system is ln(9) [12]. Thus, the
n
tr1
rise time of the system for step input is
ln (9 )
(25)
tr1
k pc k
ln (9 )
(26)
k pc
(1 m % )
k * tr1
where m% is the design margin. In this paper design margin is
chosen 20%.
B. Active and Reactive Power controller of RSC
Applying Laplace Transform to equations (17) & (18), the
plant transfer function for the power control loops of RSC can
be written as [7]:
Ps ( s ) Q s' ( s )
3 L
(27)
* m * Vs k '
irq ( s ) ird ( s )
2 Ls
The simplified cascade control scheme with qd-axes inner
rotor current control loops and outer active and reactive power
control loops are shown in Fig-11 and Fig-12 respectively.
The PI-controllers in the power control loops can be
designed following the same steps as was used for PIcontroller in current control loops. The integral gain and
proportional gain can be found as
(28)
a ip k pc k
ln(9)
(29)
(1 m % )
k pc * k * k ' * t r 2
where tr2 is the rise time of the power control loop for step
input [s].
k pp
V. SIMULATION RESULTS AND DISCUSSION
The model of the complete system has been prepared using
MATLAB/Simulink and simulations have been carried out for
A. Transient response without pitch controller, for wind
velocity variations from below rated to rated and back to
below rated (i.e. 8m/s to 12m/s to 8m/s)
During 0 to 8 sec time interval wind velocity is 8 m/s
(below the rated wind speed 12 m/s). In this time interval,
simulation result shows that the rotor side active power
controller adjust the turbine speed to make power coefficient
maximum (approximately 0.48) as per the command of MPPT
controller to capture maximum power (at zero pitch angle). As
the generator operates below synchronous speed (i.e. subsynchronous mode), the rotor absorbs active power from the
grid (positive rotor power as shown in Fig-13(l)). During time
interval 8 to 18 sec, a ramp increase in wind velocity from 8
m/s to 12 m/s at t = 8 sec. Controller adjusts the rotor speed to
capture maximum active power output from the varied wind
speed. Reactive power is regulated to a zero value for unity
power factor generation. It is observed that when generator
changes from sub-synchronous mode to super-synchronous
mode of operation, the rotor delivers active power to the grid
(Negative rotor power as shown in fig-13(l)). Also, fig-13(m)
shows the rotor current changes its phase while the operation
changes from sub-synchronous to super synchronous mode of
operation and vice-versa. Although MPPT controller tracks
the Cp maximum value corresponding to maximum power
with respect to variation speed below the rated value 12 m/s,
there is deviation in actual Cp value from Cp-max observed
during transient period. Hence, there is little deviation in the
speed tracking and active power tracking response also
observed before they track their respective reference values as
shown in Fig-13 (a)-(d). During time interval 18 to 25 sec, a
ramp decrease in wind velocity from 12 m/s to 8 m/s at t = 18
sec. The rotor speed is again adjusted by the controller to
capture maximum active power from the wind as like in the
first interval.
From Fig-13 (d)-(j), it is also observed that the change in
the stator active power generated, rotor speed and
electromagnetic torque corresponding to the variation in the
wind speed is due to change in the rotor q-axis current by the
active power PI controller; similarly, the reactive power PI
controller controls the d-axis rotor current to be at zero value
(approximately) so as to generate zero reactive power for unity
power factor power generation at constant stator (Grid)
voltage (constant Vqs with Vds=0) level. Fig.13 (k), (n)-(p)
shows the Vdc link voltage remains almost constant throughout
33
Fig-11 Cascade active power control loop
Page
Fig-10 Current control loop
the complete model. All relevant parameters are given in the
Appendix. The time responses of Reference & actual speed
(wr), Cp (power Co-efficient) and Reference & actual stator
power (Ps), Reference & actual reactive power (Qs) and
mechanical & electrical torque (Tm & Te), d-axis rotor current
(Ird) and q-axis rotor current (Irq), d-axis stator voltage (Vsd)
and q-axis stator voltage (Vsq), Reference & actual DC-link
voltage (Vdc), Rotor Power (Pr), one phase rotor current, dqaxis grid side converter current (Idg, Iqg), Grid Reactive power
(Qg) and Pitch angle (beta), in response to the changes in the
wind velocity {below, above and rated wind speed (=12m/s)},
are shown in figs. 13 and 14 respectively without and with
pitch controller.
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
the operation by controlling the d-axis gird side converter
current through dc-link voltage PI controller of GSC while the
reactive power fed to grid is zero by controlling the q-axis gird
side converter current to zero value to maintain unity
displacement factor.
B. Transient response with pitch controller, for wind speed
variations from below rated to above rated and back to
below rated (i.e. 8m/s to 14m/s to 8m/s)
In this case, with the ramp increase in wind velocity from 8
m/s to 14 m/s (above rated speed = 12 m/s) at t = 6 sec, it is
observed that the pitch angle controller restricts the output
power at rated power level by reducing the power co-efficient
(corresponding to Pmax value) with the increase in the blade
pitch angle beta (β) as the wind speed increases above rated
value 12 m/s as shown in fig-14 (a)-(d). Accordingly β
increases from zero value when wind speed increases above
12 m/s (between 6 to 7 sec) and reaches a value 5◦
approximately corresponding to reduced Cp-max (3.2
approximate) at 14 m/s. It is also observed from Fig. 14 (e)-(g)
that active power PI controller changes the generated (stator)
power as per the command of MPPT controller below the
rated wind velocity and Pitch-angle controller above the rated
wind speed with corresponding change in rotor speed and
electromagnetic torque; similarly, reactive power PI-controller
ensures zero stator reactive power for unity power factor
generation. From Fig. 14 (h)-(i), it can also be observed that
the dc-link voltages PI-controller along with dq-axes current
PI-controllers of GSC control the rotor power flow between
GSC and Grid to maintain dc-link voltage almost constant
under varying wind speed.
Fig-13 (a) Wind Velocity (b) Reference & actual generator speed (wr* & wr)
(c) Cpmax & (d) Reference and actual Stator power (Ps* & Ps)
Fig-13 (e) Reference & Actual reactive power (Qs*, Qs) (f) Tm & Te (N-m)
VI. CONCLUSIONS
34
Fig-13 (g) d-axis rotor current (Ird) & (h) q-axis current (Irq)
Fig-13 (i) q-axis stator voltage (Vsq) & (j) d-axis stator voltage (Vsd)
Page
This paper has investigated the performance of a 1.5MW
DFIG based variable speed wind energy conversion system in
the MATLAB / Simulink environment. The pole placement
technique is used to determine the gains of active and reactive
power PI controllers and corresponding inner current PI
controllers of RSC for decoupled control of stator active and
reactive power to ensure maximizing the power generation at
unity power factor under varying wind speed. The internal
model control technique is used to determine the PI controller
gains for the dc-link voltage controller of GSC to maintain dc
link voltage almost constant under varying rotor active power
flow corresponding to varying wind velocity.
The pole placement technique is used to determine of gains
of dq-axes current PI controller which eventually controls the
active power flow between the GSC and Grid at unity
displacement factor. This paper has also incorporated an
optimal speed tracking controller mechanism and pitch angle
controller mechanism for maximum energy capture during low
wind velocity and restricting the mechanical output power to
its rated value during higher wind velocity respectively. The
simulation result shows good dynamic response of DFIG
based WECS under varying wind speed power generation.
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
Fig-13 (p) Grid Reactive power (Qg)
Fig-13 (k) DC-link Voltage in volt
Fig-13 (l) Rotor Power (Pr)
Fig-14 (a) wind velocity (Vw) (b) Reference & actual generator speed
(wr* and wr) (c) Cp and (d) Beta (pitch angle)
Fig-13 (m) one phase rotor current
Fig-14 (e) Reference & actual stator power (Ps* & Ps in watt), (f)
Reference & actual reactive power (Qs*& Qs in VAr) and (g) Mechanical &
Electromechanical torque (Tm & Te in N-m)
Fig-13 (o) q-axis grid side converter current
Fig-14 (h) Rotor Power (Pr) & (i) DC-Link Voltage in volt
Page
35
Fig-13 (n) d-axis grid side converter current
Subir Datta, Mishra JP, Roy AK. Performance Analysis of a DFIG based Variable Speed Wind Energy Conversion System. Discovery, 2015, 47(216), 29-36
REFERENCES
1.
2.
3.
4.
5.
6.
B. H. Chowdhury, S. Chellapilla, “Double –Fed Induction Generator
Control for Variable Speed Wind Power Generation,” Elsevier Power
System Research, 2006, pp: 786-800.
L. Holdsworth, X.G. Wu, J.B. Ekanayake and N. Jenkins,
“Comparison of fixed speed and doubly-fed induction wind turbines
during power system disturbances,” IEE Proc. Gener. Transm.
Distrib., 150 (3): 343-352, 2003.
G. Li, M. Yin, M. Zhou and C. Zhao, “Decoupling control for multi
terminal VSC HVDC based wind farm interconnection,” IEEE Power
Engineering Society General Meeting, 2007, pp.1-6.
R.G. Almeida, E.D. Castronuovo, J.A. Pacas Lopes, “Optimum
Control in Wind Parks when Carrying out system Operator
Requests,” IEEE Transactions Power System. Vol.19, 2006, pp 19421950.
M.V.A. Nunes, H.H. Zurn, U.H. Bezerra, J.A. Pecas Lopes, R.G.
Almeida, “Influence of the variable Speed wind Generators in
Transient Stability Margin of the Conventional Generators Integrated
in Electrical Grids,” IEEE Transactions on Energy Conversion. Vol.
21, 2006, pp257-264.
Y. Lei, A. Mullane, G. Lightbody, R. Yacamini, “ Modeling of the
wind turbine with a Doubly fed Induction Generator for Grid
Integration Studies,” IEEE Transactions on Energy Conversion,
Vol.21, 2006, pp.257-264.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
T. Sun, “Power Quality of Grid-Connected Wind Turbines with
DFIG and Their Interaction with the Grid,” Ph.D thesis, Institute of
Energy Technology, Aalborg University, Denmark, May, 2004.
L. Harnefors, H. P. Nee, “Model-based current control of AC
machines using the internal model control method,” IEEE Trans. on
Industry Applications, vol. 34, no. 1,1998, pp. 133-141.
J. G. Zhang, Z. M. Chen, Z. C. Zhao, “A new anti windup speed
controller for induction motor drive system,” Proc. of the Fifth
International Conference on Electrical Machines and Systems, vol. 2,
2001, pp. 1240-1243.
L. Harnefors, H. P. Nee, “Robust current control of AC machines
using the internal model control method,” Proc. of the 1995 IEEE
Industry Applications conference, vol.1, 1995, pp. 303-309.
K. Hentabli, M. E. H. Benbouzid, D. Pinchon, “CGPC with internal
model structure: Application to induction motor control,” Proc. of the
1997 IEEE International Conference on Control Applications, 1997,
pp. 235-237.
A. Petersson, “Anylysis, modeling and control of doubly-fed
induction generators for wind turbines,” Ph.D thesis, Department of
Electric Power Engineering, Chalmers University of Technology,
2003.
L. Qu and W. Qiao, “Constant Power Control of DFIG Wind
Turbines With Super capacitor Energy Storage” IEEE Trans. Ind.
Appl., vol. 47, no.1, 2011, pp. 359-367.
B. Pokharel, “Modeling, Control and Analysis of a Doubly Fed
Induction Generator Based Wind Turbine System with Voltage
Regulation,” MS Thesis, Dept. of Electrical Engineering, Tennessee
Technological University, 2011.
N. M. Miller, W. W. Price, and J. J. Sanchez-Gasca, “Dynamic
Modeling of GE 1.5 and 3.6 Wind Turbine-Generators,” GE-Power
Systems Energy Consulting, General Electric International, Inc,
2003,pp-2.1-2.7.
E. B. Muhando, T. Senjyu, A. Uehara, Toshihisa Funabashi, and
Chul-Hwan Kim, “LQG Design for Megawatt-Class WECS With
DFIG Based on Functional Models' Fidelity Prerequisites,” IEEE
Trans. on Energy Conversion, vol. 24, no. 4, 2009, pp. 893-904.
M. K. Das, S. Chowdhury, S.P. Chowdhury and C.T. Gaunt, “Control
of a Grid Connected Doubly-Fed Induction Generators for Wind
Energy Conversion”, IEEE, 2009, pp.1-5.
Krause, O. Wasynczuk, and S. D. Sudhoff, “Analysis of Electric
Machinery and Drive Systems,” IEEE Press, Wiley-Interscience,
John Wiley & Sons, Inc., 2002, New Jersey.
R. Pena, J.C. Clear, G.M. Asher, “Doubly fed induction generator
using back-to-back PWM Converters and its application to variablespeed wind energy generation,” IEE Proc.-Elect. Power Appl., 1996,
Vol.143, No.3, pp. 231-241.
36
A. Specifications of Doubly fed Induction Generator
Rated Capacity = 1.5MW; Optimal (Rated); Rotor
speed=2158 rpm (Electrical); Wm (rated) =225.9 rad/sec
(Mech.); No. of poles=4; Frequency=60 Hz; Ns (synchronous
speed) = 1800 rmp; Rated Voltage (Line to line) = 690 V;
Synchronous angular speed (Ws)= 188.5 rad/sec (Mech.);
Shaft Inertia=18.7 kg.m^2; Lm=2.88mH; Rotor referred
inductance=2.97mH; Ls=2.93 mH; Rotor referred resistance=2
m-ohm; R=2.3 m-ohm
B. Specifications of Wind turbine:
Blade
Radius=30.66m;
Cut-in/cut-out
wind
speed=4/25 m/s; Gear Box=71.28; Rated wind speed=12 m/s;
Air density=1.225 kg/m3.
C. Specification of converter
DC-link Voltage=1400V; DC-link capacitor=60mF;
Switching frequency=5000 Hz; Sampling time=2e-5; Lg
=2mH; Rg =2mH.
7.
Page
APPENDIX