"Lecutre" Notes - University of Notre Dame
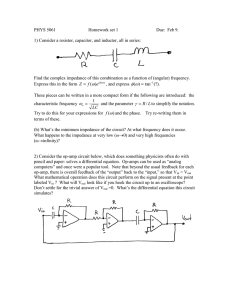
advertisement

AME 20213 LECUTRE NOTES
Michael Buche
Adapted from lectures given by Paul Rumbach
in AME 20213 of Spring 2015
Updated June 16, 2015
2
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 1 — General Information
1.1
The Class
AME 20213 (lecture) website:
http://www3.nd.edu/~prumbach/AME20213/
AME 21213 (lab) website:
http://www3.nd.edu/~jott/Measurements/3/
AME 20213 Textbook:
Measurement and Data Analysis for Engineering and Science, Third Edition by Patrick F. Dunn
Paul Rumbach’s office hours:
364 Fitzpatrick Hall, Tuesdays and Thursdays, 11:00am - 12:00pm.
AME 21213 Experiment 1 presentation given by Michael Wicks:
http://www3.nd.edu/~jott/Measurements/Measurements_lab/E1/wicks_ppt.pdf
AME 20213 “Lecutre” Notes: (check here for possible updated notes)
https://www.nd.edu/~mbuche1/ame20213.html
3
4
1.2
Lecture 1: General Information
The “Lecutre” Notes
I wrote these notes in LATEX, mostly during class, in the spring of 2015 - the second semester of my sophomore
year. I really enjoyed the class and thought this was a great way to make sure I knew the material. I made
sure I did not miss a single lecture and tried to compile all relevant lecture information possible. It also
became a great way to practice using LATEXand even learn new things, like TikZ - I went back and remade
as many figures as I could using it. Other diagrams were made in paint.
I sent the notes to the instructor Paul Rumbach at the semester end, and he told me that he was previously
using handwritten notes during class, and that the notes would be great for next semester. This means that
you might even have the same information and example problems in class. I hope these notes will continue
to used for the class in some way, I will update them whenever I can, but I will need your help: let me know
of any errors you see, or of anything outdated I can update. I only want the Lecutre Notes to help!
Michael Buche
mbuche1@nd.edu
University of Notre Dame ‘17
Mechanical Engineering
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 2 — Introduction to Engineering Sensors
Absolute quantization error - or precision uncertainty ”Ux ” = half of the smallest division.
Reporting uncertainty: should be 9.4 ± 0.5, not 9.4204 ± 0.5 because the 0.5 indicates uncertainty of anything
smaller. The additional 0.0204 is insignificant.
A transducer converts one physical stimulus to a more easily measured phenomenon, while the measurand
is what is being measured.
2.1
Manometer
Figure 2.1: A manometer is a u-shaped tube that measures difference in fluid height on each side to find the
differential pressure (gauge pressure); an example of a pressure transducer, and pressure is the measurand.
The equation for gauge or differential pressure ∆P is
∆P = P − Po = ρgh
5
(2.1)
6
Lecture 2: Introduction to Engineering Sensors
where P is the unknown pressure of the fluid of interest, Po is the pressure of the ambient fluid (usually
air at atmospheric pressure of 1 atm), ρ is the density of the reference fluid (usually mercury), g is the
gravitational acceleration (usually 9.81 m/s), and h is the differential height of the reference fluid between
the two sides of the manometer.
When working inside a vacuum, Po = 0, so the pressure P is the absolute pressure.
2.2
Pitot Static Probe
Figure 2.2: A pitot static probe measures air speed using a pressure transducer that measures ∆P .
If a manometer is used as the transducer in Fig. (2.2), the equations become:
Pt − Ps = ρr gh
v2 =
2ρr gh
ρa
(2.2)
where ρr is the density of the manometer reference fluid, and ρa is the density of the air.
2.3
Resistance Temperature Detector
The equations for the response of an RTD are as follows:
R = Ro [1 + αT (T − To )]
T = To +
R − Ro
αT Ro
(2.3)
where R is the resistance of the wire at the measurand temperature T , Ro is a reference resistance at the
reference temperature To , and αT is the thermal expansion coefficient for the wire in the resistor.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 2: Introduction to Engineering Sensors
7
Temperature ( oC)
100
80
60
40
20
0
0
1
2
3
Voltageout (V)
4
5
Figure 2.3: A resistance temperature detector (RTD) and thermometer with calibration plot.
An RTD is commonly used in combination with a Wheatstone Bridge, where the change in resistance can be
measured using the change in output voltage Vout with respect to the input voltage Vin . The RTD response
T vs. Vout can be calibrated into a simple linear equation ”T = aV + b” using a two-point calibration. The
easiest way would be to use 0◦ C and 100◦ C, as to avoid using a thermometer (ice water and boiling water).
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
8
Lecture 2: Introduction to Engineering Sensors
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 3 — AME Measurands and
Transducers
3.1
SI Units
Density of water ρw = 1 g/cm2 .
1/2 period of 1 a meter pendulum is 1 second.
Water boils at 100 ◦ C and melts at 0 ◦ C, shown in Fig. (3.1).
Figure 3.1: Phase diagram of pure water (4.579 mm Hg = 1 atm).
3.2
Hot-wire Anemometer
The rate at which heat or power leaves the surface of the wire is given by q̇ in the Joule heating equation:
q̇ = iV = i2 R =
9
V2
R
(3.1)
10
Lecture 3: AME Measurands and Transducers
Figure 3.2: A hot-wire anemometer measures wind speed; it uses a very fine wire electrically heated up to
some temperature. Air flow cools the wire, and electrical resistance of the wire depends on its temperature,
so a relationship can be obtained between the resistance of the wire and the air speed.
and Newton’s Law of Cooling is given by
q̇ = hAs (T − T∞ )
(3.2)
where h is a constant for the wire material, As is the surface area of the wire, Tw is the temperature of the
wire, and T∞ is the ambient temperature of the wind.
An equation can be written for h:
√
h = C1 + C2 u
(3.3)
where u is the wind speed, and C1 and C2 are constants.
Using Eq. (2.3) to quantify the changing resistance of the wire,
T = To +
R − Ro
aV
+b
= aR + b =
αT Ro
i
(3.4)
where a = (αT Ro )−1 , and b = (αT )−1 (both are constants).
Combining Eq. (3.4) with (3.3) and (3.2), an equation for u based on V and constants is obtained:
2
1
iV
u=
− C1
(C2 )2 As (aV /i + b − T∞ )
3.3
(3.5)
Electronics and Circuits
Voltmeter - measures voltage (connected in parallel) ideally has infinite resistance, usually most have
resistance of 10 MΩ.
Ammeter - measures current (connected in series) ideally has zero resistance, usually most have resistance
of approximately 1 Ω.
Ohmmeter - measures resistance.
Digital Multimeter (DMM) - measures all three of the above.
Floating Circuit - usually battery powered (like a cell phone).
Ground Referenced Circuit - a wire leads from circuit to ground (third hole in wall outlet is for ground).
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 3: AME Measurands and Transducers
3.3.1
11
Kirchoff ’s Circuit Rules
1. Current Law - the sum of the current flowing into a junction equals the sum of the current flowing out
(charge conservation).
X
iin =
X
iout
(3.6)
2. Voltage Law - the sum of all voltage drops around closed a loop is zero (energy conservation).
X
3.3.2
Vloop = 0
(3.7)
Ohm’s Law
V = IR
(3.8)
This equation is highly useful thus far, but will be seen again in Capacitors, Inductors, and Impedance.
3.4
Voltage Divider
Vin
R1
Vout
R2
Figure 3.3: If R1 is much smaller than R2 and close to zero: Vout = Vin . Usually R1 represents the resistance
of the actual sensor, placed where R1 is.
Vin = i(R1 + R2 )
3.5
Vout = iR2
Vout
R2
=
Vin
R1 + R2
(3.9)
Non-Ideal Power Supplies
Vactual = VS
RL
RS + RL
(3.10)
Droop - when the circuit draws more current than the power supply can output, the voltage goes down.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
12
Lecture 3: AME Measurands and Transducers
Vactual
RS
RL
+
−
VS
Figure 3.4: Batteries have internal impedance or resistance RS along with the load resistance RL .
3.6
Wheatstone Bridge
V1
R
1
R4
Vin
+
R1
R3
−
−
Vout
+
R2
Vout
+
R2
V2
+
−
Vin
R4
R
3
−
V1
V2
Figure 3.5: Two visualizations of the same circuit. One can use sensors (maybe an RTD or strain gauge) as
one or more of the resistors. A voltage divider can then be used to measure Vout = V2 − V1 .
The bridge is ”balanced” if Vout = 0, which happens when
R1
R3
=
R2
R4
(3.11)
Using Kirchoff’s Circuit Rules,
Vout
Vin R2
Vin R4
−
= Vin
=
R3 + R4
R1 + R2
R4
R2
−
R3 + R4
R1 + R2
and after simplifying, one gets the equation for a wheatstone bridge:
R1
R3
Vout = Vin
−
R1 + R2
R3 + R4
M. R. Buche 2015
(3.12)
(3.13)
AME 20213: Measurements and Data Analysis
Lecture 4 — Investigating Internal
Resistance
Even batteries have out impedance (internal resistance) RS . For 9 V battery, VA ≈ 9.55 V.
4.1
Internal Resistance Experiment
Conducted by Paul Rumbach, in lecture.
When RL = 1.307 kΩ, VA = 9.42 V.
When RL = 267 Ω, VA = 9.28 V.
When RL = 10.2 Ω, VA = 7.24 V, and the resistor started to smoke from too much heat that results
from too much current, seen in the Joule heating equation:
q̇ = iV = i2 R =
V2
R
(4.1)
and the heat melted the paint, creating smoke.
Drawing more current than the battery is designed to supply (droop) causes the voltage VA to drop.
RS =
Solving for RS for each:
RL (VS − VA )
VA
(4.2)
RS1 = 18 Ω, RS2 = 7.7 Ω, and RS3 = 3.25 Ω.
Trial
1
2
3
RL (Ω)
1,307
267
10.2
VA (V)
9.42
9.28
7.24
RS (Ω)
18
7.7
3.25
Table 4.1: Data accumulated from Paul’s experiment.
13
14
M. R. Buche 2015
Lecture 4: Investigating Internal Resistance
AME 20213: Measurements and Data Analysis
Lecture 5 — Scaling Analysis, Circuits,
Cantilever Beams, Capacitors
5.1
Scaling Analysis
Some examples of equations that might be scaled or linearized:
Power Law,
y = kxn
(5.1)
F = (GmM )r−2
(5.2)
Gravity,
Kepler’s Law,
r
T =
4π 2 3
R2
GM
(5.3)
π∆P 4
D
128µl
(5.4)
2τ
ρU 2
(5.5)
1 2
at + xo
2
(5.6)
Laminar pipe flow,
Q=
Blasius shear stress,
Cs =
Trajectory,
x=
5.1.1
Logarithmic Scaling
The Power Law given in Eq. (5.1) can be simplified by using logarithms on both sides:
log y = log kxn = log k + log xn = log k + n log x
(5.7)
Analyzing: log y is linear with respect to log x.
log y = log k + n log x = mz + b
15
(5.8)
16
Lecture 5: Scaling Analysis, Circuits, Cantilever Beams, Capacitors
The slope m is n, and the intercept b is log k.
5.1.2
Linearization
Trajectory in Eq. (5.6) can be linearized. Power law using logarithmic simplification does not work here
because of the xo term. Plot x vs. t2 :
z = t2
x=
1 2
1
at + xo = az + xo = mz + b
2
2
(5.9)
The slope of x vs. t2 is m = a/2, and the intercept is b = xo .
Collapsing data: the equation for a sphere rolling down a slope θ is given by
1 5
g sin θ t2
x=
2 7
(5.10)
and plotting x vs. sin(θ)t2 for different θ values will collapse data to a single line.
5.2
5.2.1
Circuits
Circuit Example One
R1
i1
V2
V1
R2
R3
i2
i3
Figure 5.1: Example problem 3.3 from the text: find the currents i1 , i2 , and i3 .
Use Kirchoff’s Circuit Rules to get:
M. R. Buche 2015
i1 = i2 + i3
(5.11)
V1 − i1 R1 + V2 − i3 R1 = 0
(5.12)
V2 − i3 R1 + i2 R2 = 0
(5.13)
AME 20213: Measurements and Data Analysis
Lecture 5: Scaling Analysis, Circuits, Cantilever Beams, Capacitors
17
or around the outer-most loop:
V1 − i1 R1 − i2 R2 = 0
(5.14)
Eq. (5.14) is not linearly independent from Eq. (5.12) and (5.13), so they are needed along with Eq. (5.11)
anyway to have 3 linearly independent equations to solve for 3 variables.
The equations can be solved by hand or by something like Mathematica, or even MATLAB.
They can also be solved as a matrix:
1 −1
1
i1
0
R1 0
R1 i2 = V1 + V2 .
0 R2 −R1
i3
−V2
5.2.2
Circuit Example Two
What is Req and the current i is in the battery? Given: V = 12 V, R1 = R2 = 20 Ω, R3 = 30 Ω, R4 = 8 Ω.
R1
R3
R1
i
i
R2
V
i
R2
V
R4
R3
V
Req
R4
Figure 5.2: The circuit can be simplified using equivalent resistances.
Finding the equivalent resistance or the circuit Req :
Req = R1 +
R2 R3
+ R4
R2 + R3
(5.15)
Using Ohm’s Law,
V = iReq ,
i=
V
Req
(5.16)
Plugging in the given parameters, answers are obtained:
Req = 40 Ω,
5.2.3
i = 0.3 A.
Cantilever Beam
Resistance on top - in tension - resistance increases (R1 and R4 ).
R0 = R + δR
AME 20213: Measurements and Data Analysis
(5.17)
M. R. Buche 2015
18
Lecture 5: Scaling Analysis, Circuits, Cantilever Beams, Capacitors
Figure 5.3: Cantilever beam under load F , resistors placed on top and bottom.
Resistance on bottom - in compression - resistance decreases (R2 and R3 ).
R0 = R − δR
(5.18)
The resistors are typically used in a Wheatstone Bridge configuration.
Combining Eq. (3.13) with (5.17) and (5.18):
Vout
R1 + δR1
R3 − δR3
=
−
Vin
R1 + δR1 + R2 − δR2
R3 − δR3 + R4 + δR4
(5.19)
For strain gauges, R1 = R2 = R3 = R4 = R, and strain is the same on the top and bottom (but opposite),
so δR1 = δR2 = δR3 = δR4 = δR, so simplifying:
δR
Vout
=
Vin
R
(5.20)
For a strain gauge of resistivity ρ, length L, and surface area A:
=ρ
δL
δR
L
=
=
A
L
R
(5.21)
so using this with Eq (5.20):
=
Vout
Vin
(5.22)
Consider that the resistors are subject to manufacturing defects and temperature changes; ρ changes with
temperature, but because all resistors have the same ρ, it will not matter in this case.
Poisson’s ratio - materials (resistors) thin as they are stretched:
δR
δL δA
δA
=
−
=−
(5.23)
R
L
A
A
Look closer at the term − δA/A; since the change in area of the resistor due to its elongation was not
originally considered, δA/A would be the experimental error.
But error and uncertainty are not the same thing:
Error - difference between measured value and the true value (δA/A in this case).
Uncertainty - an estimation of the error: ”L = 1.3 ± 0.5 cm”, 0.5 is uncertainty; specifies a range over
which is most likely to find the true value.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 5: Scaling Analysis, Circuits, Cantilever Beams, Capacitors
5.3
19
Capacitors
Capacitance C is measured in units of Farads:
C=
q
V
(5.24)
where q is the charge built up on the capacitor, and V is the voltage between the plates.
Figure 5.4: Parallel plate capacitor, with direction of electric field shown.
Dielectric material can be placed between the plates:
C=
κo A
h
(5.25)
where A is the surface area of the plates, h is the distance between them, and κ is the dielectric constant of
the material between the plates (always ≥ 1).
Polarizable materials like water have a high dielectric constant (κ of about 80).
Capacitive sensors measure a change in capacitance:
∆C
−∆h ∆A ∆κ
=
+
+
C
h
A
κ
(5.26)
Example: capacitance sensors are used in cell phone touch-screens.
Another example (from the text): a capacitive pressure transducer, with the following responses:
16EH 3
xc
∆P =
3r4 (1 − νp2 )
−∆h ∆xc
∆C
=
+
C
h
h
!
3r4 (1 − νp2 )
∆C
=
∆P
C
16EH 3 h
AME 20213: Measurements and Data Analysis
(5.27)
(5.28)
(5.29)
M. R. Buche 2015
20
M. R. Buche 2015
Lecture 5: Scaling Analysis, Circuits, Cantilever Beams, Capacitors
AME 20213: Measurements and Data Analysis
Lecture 6 — Capacitors, Inductors, and
Impedance
Direct current (DC) - applied voltage is constant in time.
Alternating current (AC) - applied voltage varies sinusoidally in time (wall outlets are 60 Hz AC).
V (t) = V sin(ωt)
(6.1)
√
V is the peak amplitude, but something called Vpp is the ”peak to peak amplitude” (just 2V ), and VRM S = V / 2
(wall outlets are 120 V RMS).
V (t) = V sin(ωt) = Re (V eiωt )
(6.2)
eiθ = cos θ + i sin θ
(6.3)
Re (eiθ ) = cos θ
(6.4)
Im (eiθ ) = sin θ
(6.5)
Complex numbers are easier to work with because:
6.1
eiα
= ei(α−β)
eiβ
(6.6)
Ceq = C1 + C2
(6.7)
Capacitors
Capacitors in parallel:
Capacitors in series:
1
1
1
=
+
Ceq
C1
C2
Ceq =
C1 C2
C1 + C2
(6.8)
Energy stored on capacitor:
U=
q2
CV 2
=
2C
2
21
(6.9)
22
Lecture 6: Capacitors, Inductors, and Impedance
RC circuit:
q
dq
q
=0
V −R −
= 0,
C
dt
C
This is a first order differential equation. Solution:
V − ir −
q(t) = CV (1 − e−t/τ ),
RC
dq
+ q = CV
dt
τ = RC
(6.10)
(6.11)
The RC time constant is known as τ .
i=
dq
V
V
=
= e−t/τ
dt
R
R
(6.12)
As time approaches infinity, the current in the RC circuit approaches 0.
6.1.1
Capacitor Impedance
Capacitors will always have current with AC (charges and uncharges the capacitor), but they ”block” current
with DC (as charge builds up).
q(t) = CV (t) = CV eiωt
(6.13)
I=
dq
= iωCV ei/t
dt
I = iωCV (t)
V (t) =
(6.15)
1
I(t)
iωC
The ”impedance” of the capacitor, ZC :
(6.14)
(6.16)
1
iωC
(6.17)
V = IZC
(6.18)
ZC =
Eq. (6.18) resembles Ohm’s Law.
6.2
Inductors
Figure 6.1: Solenoid - wire wrapped around a cylinder, which has inductance.
V =L
M. R. Buche 2015
di
dt
(6.19)
AME 20213: Measurements and Data Analysis
Lecture 6: Capacitors, Inductors, and Impedance
23
L is the inductance of the structure; for the solenoid:
L = µη 2 lA
(6.20)
µ = magnetic permeability.
1. For vacuum - µ = 1.6 ∗ 10−6 N*A−2
2. For iron - µ = 6.3 ∗ 10−3 N*A−2
3. For carbon steel - µ = 1.26 ∗ 10−4 N*A−2
η = number of turns per length.
l = total length.
A = cross-sectional area.
6.2.1
Inductor Impedance
V (t) = V eiωt = L
Z
LI =
V eiωt dt =
dI
dt
1
1
V eiωt =
V (t)
iω
iω
(6.21)
(6.22)
V (t) = iωLI(t)
(6.23)
ZL = iωL
(6.24)
V = IZL
(6.25)
The impedance of the inductor, ZL :
Eq. (6.25) resembles Ohm’s Law.
6.2.2
Inductive sensors
Fe rod has a different µ, and this changes L.
Example, a traffic light sensor: a car is steel and has large µ, and this changes the inductance of the coiled
wire under the pavement.
6.3
Ohm’s Law Equivalent
For the impedance of a resistor hooked up to AC Voltage:
ZR = R
(6.26)
Applying Eq. (6.18) and (6.25), one can treat inductors and capacitors as if they were resistors with ”resistances” given by ZL and ZC , use Ohm’s Law, and then can even apply Kirchoff’s Circuit Rules.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
24
M. R. Buche 2015
Lecture 6: Capacitors, Inductors, and Impedance
AME 20213: Measurements and Data Analysis
Lecture 7 — AC Circuits
7.1
AC Circuits
V (t) = V sin ωt
Peak amplitude - V .
Peak to peak amplitude - Vpp = 2V .
T = f −1
(7.1)
ω = 2πf
(7.2)
ω in units of rad/s
VRM S
v
u
u
=t
!
T
(7.3)
0
V
=√
2
Re (z) = a
Im (z) = b
(7.4)
1
T
Z
V (t)dt
Wall outlet - AC - f = 60 HZ, VRM S = 120 V.
7.1.1
Complex Numbers
z = a + ib
Using polar Coordinates:
r=
p
a2
+
b
θ = arctan
a
b2
z = r cos θ + ir sin θ = r(cos θ + i sin θ)
7.1.2
z = reiθ = |z|eiθ = a + ib
(7.5)
(7.6)
Impedance and Phase
For the capacitor - current leads voltage:
ZC =
I(t) =
V (t)
= V eiωt
ZC
e−iπ/2
ωC
e−iπ/2
ωC
−1
(7.7)
= ωCV ei(ωt+π/2)
(7.8)
For the inductor - voltage leads current:
ZL = ωLeiπ/2
25
(7.9)
26
Lecture 7: AC Circuits
I(t) =
V i(ωt−π/2)
e
ωL
(7.10)
Animation shown in class:
walter-fendt.de/ph14e/accircuit.htm
7.2
AC-RC Circuit Example
R
Vin (t)
C
Figure 7.1: Vin (t) = V sin ωt; what is the amplitude and phase if V = 1 V, R = 1 kΩ, C = 1 µF, and
f = 1 kHz?
Use the Ohm’s Law Equivalent, but remember that ω = 2πf .
Zeq = ZR + ZC = R −
Zeq = |Zeq |e
iφ
i
ωC
q
2
|Zeq | = R2 + (1/ωC)
V iφ
V (t)
V eiωt
=
e
=
Zeq
|Zeq |eiφ
|Zeq |
V iφ V
V
|I(t)| = e =
=p
2
|Zeq |
|Zeq |
R + (1/ωC)2
−1
φ = arctan
ωRC
I(t) =
I = 0.988 mA
M. R. Buche 2015
φ = −0.158 rad or − 9.04◦
AME 20213: Measurements and Data Analysis
Lecture 8 — RC Circuit Frequency
Filters
An oscilloscope is brought into lecture by Paul Rumbach and output is displayed via the projector.
Both the capacitor and the inductor have a voltage that is 90◦ out of phase with the current, the difference is that the current is 90◦ behind the voltage for inductors, but 90◦ ahead of the voltage for capacitors.
The oscillation curve for impedance ZR = R is purely real, and its voltage is exactly in phase with the current.
8.1
Low Pass Filter
R
Vout
Vin (t)
C
Figure 8.1: Circuit configuration for a low pass filter.
Looks like the voltage divider equation:
ZC
1/ωC
1
Vout = Vin
= Vin
= Vin
ZC + R
i/ωC + R
1 + iωRC
reiφ = 1 + iωRC
Vout
1 − iωRC
=
= a + ib
Vin
1 + (ωRC )2
Vout
1
a = Re
=
Vin
1 + (ωRC )2
Vout
iωRC
b = Im
=
Vin
1 + (ωRC )2
27
(8.1)
(8.2)
(8.3)
(8.4)
(8.5)
28
8.1.1
Lecture 8: RC Circuit Frequency Filters
Amplitude: Low Pass Filter
Vout
Vin
p
1
= a2 + b2 = p
1 + (ωRC )2
(8.6)
Figure 8.2: As ω → 0, Vout /Vin → 1, and as ω → ∞, Vout /Vin → 0.
8.1.2
Phase: Low Pass Filter
Vout = (a + ib)Vin = reiφ = rVin et(ωt+φ)
(8.7)
b
φ = arctan
= arctan(−ωRC)
a
(8.8)
Figure 8.3: As ω → 0, φ → 0, and as ω → ∞, φ → −π/2.
X = ωRC, dimensionless variable X.
M. R. Buche 2015
Vout
1
=√
Vin
1 + X2
(8.9)
φ = arctan(−X)
(8.10)
AME 20213: Measurements and Data Analysis
Lecture 8: RC Circuit Frequency Filters
29
Paul Rumbach demonstrates a low pass filter in lecture using circuit breadboard and oscilloscope:
• BNC cable - Bayonet Neill-Concelman cable.1
• Output displayed on projector: slight phase shift between the two resistors - this is because in reality,
resistors are non-ideal and have inherent inductance and capacitance.
• Two oscillating sinusoidal curves are shown - Vout (t) and Vin (t).
• Their amplitudes are given by |Vout | and |Vin |.
• Low frequency ω - very small phase shift, amplitudes are very similar (Vout /Vin ≈ 1).
• High frequency ω - large phase shift, amplitudes very different (Vout /Vin << 1).
• Remember why? If not, check out Fig. 8.2 and 8.3 again.
8.2
High Pass Filter
C
Vout
Vin (t)
R
Figure 8.4: Circuit configuration for a low pass filter.
Looks like the voltage divider equation again:
Vout
R
R
=
=
Vin
ZC + R
R − i/ωC
(8.11)
Vout
R2 + iR/ωC
(ωRC)2 + iωRC
= 2
=
= a + ib
2
Vin
R + 1/(ωC)
(ωRC)2 + 1
(8.12)
a=
8.2.1
(ωRC)2
1 + (ωRC)2 )
b=
ωRC
1 + (ωRC)2
(8.13)
Amplitude: High Pass Filter
s
2
2
Vout p
X
= a2 + b2 = (ωRC) (1 + (ωRC) ) = p ωRC
=√
Vin 2
2
2
(1 + (ωRC) )
1 + X2
1 + (ωRC)
1 Very
(8.14)
commonly mistake as “British Naval Connector”.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
30
Lecture 8: RC Circuit Frequency Filters
Figure 8.5: As ω → 0, Vout /Vin → 0, and as ω → ∞, Vout /Vin → 1.
8.2.2
Phase: High Pass Filter
φ = arctan
b
1
1
= arctan
= arctan
a
ωRC
X
(8.15)
Figure 8.6: As ω → 0, φ → π/2, and as ω → ∞, φ → 0.
Paul Rumbach shows high pass filter with oscilloscope:
• Two oscillating sinusoidal curves are shown - Vout (t) and Vin (t).
• Their amplitudes are given by |Vout | and |Vin |.
• High frequency ω - very small phase shift, amplitudes are very similar (Vout /Vin ≈ 1).
• Low frequency ω - large phase shift, amplitudes very different (Vout /Vin << 1).
• See why? If not, check out Fig. 8.5 and 8.6 again.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 9 — RLC Circuit Frequency
Filters
V
L
C
Figure 9.1: Charges build up on capacitor, switch is thrown, then the capacitor discharges through inductor.
q
di
+L =0
C
dt
(9.1)
q
d2 q
+
=0
dt2
C
(9.2)
d2 q
q
+
=0
2
dt
LC
(9.3)
L
√
This is a harmonic oscillator, with ωo = 1/ LC, the natural resonance frequency.
The solution to Eq. (9.3) is given by:
q(t) = V C cos(ωo t)
V (t) = V cos(ωo t)
9.1
(9.4)
(9.5)
AC Driven LC Circuit
Zeq
−i
1
= iωL +
= i ωL −
ωC
ωC
I(t) =
31
V (t)
Zeq
(9.6)
(9.7)
32
Lecture 9: RLC Circuit Frequency Filters
ZL
L
Vin (t)
C
Vin (t)
ZC
Vin (t)
Zeq
Figure 9.2: A simple LC circuit, converted into an equivalent impedance in two steps.
Current amplitude I:
V (t) V
=
|I(t)| = Zeq ωL − 1/ωC
I=
(9.8)
V ωC
ω 2 LC − 1
(9.9)
If (ω 2 LC) = 1, then I→ ∞, but in reality there is always some resistance - it is really an RLC circuit:
R
L
Vin (t)
C
Figure 9.3: A simple RLC circuit; resistance R represents internal resistance somewhere in the LC circuit.
q(t = 0) = V C
(9.10)
di
q
+ iR + L = 0
C
dt
(9.11)
q
d2 q
q
=0
+R +
2
dt
C
C
This is a damped, harmonic oscillator. Solution below - involved computation in the text:
L
q(t) = V Ce−t/τ cos(µt)
M. R. Buche 2015
(9.13)
2L
R
(9.14)
p
LC − (RC)2
2LC
(9.15)
τ=
µ=
(9.12)
AME 20213: Measurements and Data Analysis
Lecture 9: RLC Circuit Frequency Filters
33
q(t)
t
Figure 9.4: Plot of charge for a damped, harmonic oscillator. It resembles the ”ringing” of a bell over time.
9.2
Band Pass Filter
- - Vout - Vin -
Bandwidth
ωo
ω
√
Figure 9.5: A An AC driven RLC circuit that isolates certain a frequency ωo = 1/ LC, passing a narrow
range of frequencies: the ”bandwidth”.
9.3
Notch Filter
9.4
AC Wheatstone Bridge
Vout
Vin
9.5
Z1
Z3
=
−
Z1 + Z2
Z3 + Z4
(9.16)
Fourier Analysis
Pure sine waves have only been discussed so far, how about some others? (Chapter 9 of the text) An example
would be an electrocardiogram (measures someone’s heartbeat), or some of the following waves.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
34
Lecture 9: RLC Circuit Frequency Filters
R
Vout (t)
Vin (t)
L
C
Figure 9.6: Circuit configuration for a band pass filter.
- - Vout - Vin -
ωo
ω
√
Figure 9.7: A notch filter is an AC driven RLC circuit that isolates a certain frequency ωo = 1/ LC,
blocking a narrow range of frequencies.
They are still periodic functions, defined by:
V (t) = V (t + T )
9.5.1
(9.17)
Fourier’s Theorem
Any continuous function f (x) (in our case, V (t) instead) on t ∈ [0, T ] can be represented as a summation of
cosines and sines:
∞ X
1
2πn
2πn
V (t) = Ao +
An cos
t + Bn sin
t ,
(9.18)
2
T
T
n=1
Ao =
M. R. Buche 2015
2
T
Z
T
V (t)dt
(9.19)
0
AME 20213: Measurements and Data Analysis
Lecture 9: RLC Circuit Frequency Filters
35
R
Vout (t)
L
Vin (t)
C
Figure 9.8: Circuit configuration for a notch pass filter.
V1 (t)
Z
1
Z4
−
Vout (t)
+
Vin (t)
Z
3
Z2
V2 (t)
Figure 9.9: AC Wheatstone Bridge configuration, using impedances.
An =
An =
T
2
T
Z
2
T
Z
2πn
t dt
T
2πn
t dt
V (t) sin
T
V (t) cos
0
T
0
(9.20)
(9.21)
Amplitudes and phase:
An cos(ωn t) + Bn sin(ωn t) = Cn cos(ωn t − φn )
Cn =
p
A2n + Bn2
φn = arctan
V (t) =
Bn
An
(9.22)
(9.23)
∞
X
1
2πn
1
Ao +
Cn cos
t + φ n + Ao
2
T
2
n=1
(9.24)
(9.25)
As T→ ∞, An ’s and Bn ’s become continuous functions of ω; check out Page 291 of the text for a cool
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
36
Lecture 9: RLC Circuit Frequency Filters
V (t)
T
t
Figure 9.10: A ”square” wave, with period T .
V (t)
T
t
Figure 9.11: A ”saw-toothed” wave, with period T .
derivation to get the following:
Fourier Cosine Transform:
∞
Z
A(ω) =
V (t) cos(ωt)dt
(9.26)
V (t) sin(ωt)dt
(9.27)
−∞
Fourier Sine Transform:
Z
∞
B(ω) =
−∞
The fundamental or ”characteristic” frequency corresponds to n = 1, and the first peak.
The other peaks are ”overtones” or integer multiples.
Paul Rumbach shows oscilloscope with a odd wave responses, with the FFT shown simultaneously. After
changing the wave to a normal sine wave, the FFT shows only one large peak - the only frequency. This
FFT does have small bumps though, because the electronics cannot make a perfect sine wave. // Paul then
shows a FFT of audio from the Notre Dame Marching Band pregame show using a graphic equalizer. If you
have ever used an equalizer before, it allows you to tune the frequencies (like the bass, treble) using notch
and band pass filters; RLC circuits!
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 9: RLC Circuit Frequency Filters
37
An , Bn
1
2
3
ωn
4
5
Figure 9.12: ”Fourier modes” are discrete frequencies at ωn = 2πn/T .
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
38
M. R. Buche 2015
Lecture 9: RLC Circuit Frequency Filters
AME 20213: Measurements and Data Analysis
Lecture 10 — Diodes and Amplifiers
10.1
Semiconductor Devices
Diode: a non-ohmic device, so the current is non-proportional to the voltage.
Shockley equation: (Io and Vth are fitting parameters)
I = Io (eV /Vth − 1)
0
i
V
(10.1)
+
−
+
V
−
+
−
+
−
Figure 10.1: Forward bias (left) allows the current to flow through the diode; reverse bias (center) does not
allow current to flow through the diode. The graph (right) shows the current in response to voltage. The
segment of the curve under the x-axis represents the ”reverse bias leakage current” and the ”diode drop” is
the limit at about 0.6 V in forward bias, where there is infinite current.
10.1.1
Light Emitting Diode (LED)
Only lights up if connected in forward bias.
Ever plug an LED into a wall circuit? The 60 Hz AC voltage causes the LED to flicker on and off between
forward and reverse bias, so it does not light up very well. Fluorescent (a tube filled with plasma) light bulbs
do the same thing, but incandescent bulbs (white-hot filament) do not.
10.1.2
Photodiode
Used to measure light intensity; connected in reverse bias with a resistor, shown in Fig. 10.3.
As more intense light hits the photodiode, the magnitude of the reverse bias leakage current iL increases.
39
40
Lecture 10: Diodes and Amplifiers
Figure 10.2: The symbol for an LED is shown on the left; the symbol for a photodiode is shown on the right.
The output voltage ends up having a linear response given by:
Vout = iL R = βREo
(10.2)
where Eo is the light intensity.
Figure 10.3: The circuit configuration for a photodiode used to measure light intensity is shown on the left.
The graph on the right shows how the reverse bias leakage current increases as more intense light hits the
photodiode.
10.2
Transistors
Figure 10.4: ”3-terminal devices” - MOSFET’s: the current ISD only flows if the gate voltage Vg is greater
than some threshold voltage Vth . Applying the voltage to the gate allows the current to flow from source to
drain - a logical condition - transistor logic!
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 10: Diodes and Amplifiers
10.2.1
41
AND Gate
Figure 10.5: Circuit configuration for an AND gate; arrows show direction of current.
VA
0
1
0
1
VB
0
0
1
1
Vout
0
0
0
1
Table 10.1: ”Truth table” or a list of logical conditions for AND gate.
10.3
Amplifiers
Figure 10.6: Amplifier circuit (where VS >> VG ) and graph showing the current’s response to variable VG .
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
42
Lecture 10: Diodes and Amplifiers
Paul Rumbach shows example of complex amplifier from the text, Figure 5.1. Instead of of drawing all those
circuits, use a triangle to model it as a black box:
Figure 10.7: The amplifier has a overall gain G that is multiplied by Vin to get Vout .
Figure 10.8: Differential amplifiers - adds extra power via an amplifier. The left shows an ”open loop”
configuration of an OPAMP, while the right shows a OPAMP feedback circuit (closed loop), what most
differential amplifiers use. OPAMP’s usually has open loop gain of 105 to 106 .
Vout = G(V+ − V− ).
M. R. Buche 2015
(10.3)
AME 20213: Measurements and Data Analysis
Lecture 11 — Analog and Digital Signals
11.1
Sound Signal
Paul shows a segment from the movie ”Spinal Tap” - how does one quantify how good an amplifier is?
The gain of course!
11.1.1
Decibels
dB = 10 log10
P =
V2
R
dB = 20 log10
11.1.2
Pout
Pin
(11.1)
(11.2)
Vout
Vin
(11.3)
Signal to Noise Ratio
Why would one want to use an amplifier? To increase the signal-to-noise ratio (SNR).
Figure 11.1: The amplifier increases the signal amplitude (the sinusoidal wave) but not the noise amplitude
(the thickness of the lines) - the two inputs of noise (V+ and V− ) cancel out and are not amplified.
43
44
Lecture 11: Analog and Digital Signals
11.1.3
Common Mode Rejection Ratio
Common mode rejection ratio (CMRR); a CMRR > 100 is considered to be good:
Gsignal
CMRR = 20 log10
Gnoise
11.2
(11.4)
OPAMPS
Golden Rules of OPAMPS:
1. Output tries to make (V− ) = (V+ ).
This makes Vin = (V− ) = (V+ ) = Vout .
2. The inputs draws no current, the outputs can give a lot of current.
This turns a low current power supply into a high current power supply.
11.2.1
Non-inverting Amplifier
Figure 11.2: The voltage on the V− is non-zero.
Rule 1: (V+ ) = (V− ) = Vin ,
Rule 2: i1 = i2 = i,
(The following 0 corresponds to ground voltage)
(V− ) − 0 = iR2
Vout = i(R1 + R2 )
V−
iR2
Vin
=
=
Vout
i(R1 + R2 )
Vout
G=
M. R. Buche 2015
Vout
R1 + R2
R1
=
=1+
Vin
R2
R2
(11.5)
(11.6)
(11.7)
(11.8)
AME 20213: Measurements and Data Analysis
Lecture 11: Analog and Digital Signals
11.2.2
45
Inverting Amplifier
Figure 11.3: The voltage on the V+ is 0 because of the ground.
Rule 1: (V+ ) = (V− ) = 0,
Rule 2: i1 = i2 = i,
Vin − (V− ) = iR1
(11.9)
(V− ) − Vout = iR2
(11.10)
iR1
Vin
=
−Vout
iR2
(11.11)
G=
Vout
−R2
=
Vin
R1
(11.12)
Figure 11.4: A negative gain ”inverts” the sinusoidal wave by negation, hence the name of the amplifier.
The amplified voltage Vout is equal to GVin , or (−R2 /R1 )Vin .
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
46
11.3
Lecture 11: Analog and Digital Signals
Other Common Circuits
Figure 11.5: Differential Amplifier - does voltage subtraction.
Vout =
R1 + R2
(V2 + V1 )
R2
(11.13)
Figure 11.6: Summing Amplifier - does voltage addition.
Vout = −(V1 + V2 + V3 )
(11.14)
Figure 11.7: Integrator - does integration; sometimes called a low pass filter.
Vout
M. R. Buche 2015
−1
=
RC
Z
t
Vin (t0 )dt0
(11.15)
0
AME 20213: Measurements and Data Analysis
Lecture 11: Analog and Digital Signals
47
Figure 11.8: Differentiator - does differentiation; sometimes called a high pass filter.
Vout = −RC
11.4
d
(Vin )
dt
(11.16)
Digital Signals
Analog Computer - numbers are represented as voltages.
Digital Computer - numbers are represented as binary code by voltages.
Bits
Voltage (V)
128
0
0
64
0
0
32
1
3
16
1
3
8
0
0
4
0
0
2
1
3
1
1
3
Table 11.1: The number 51 in binary code, “in 8-bit” - 8 bits is 1 byte.
An analog-to-digital converter (AD, or A-to-D) converts an analog signal into a digital signal (binary code)
and then is saved to the CPU or displayed somehow.
Figure 11.9: (Left) parallel AD converter; 8-bits is 8 wires with 8 voltages; n wires are n-bits. (Right) signal
AD converter; a single wire with information sent in “packets” - how the internet works; your router handles
millions of packets at a time.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
48
M. R. Buche 2015
Lecture 11: Analog and Digital Signals
AME 20213: Measurements and Data Analysis
Lecture 12 — Pop Can Experiment
Kevin Peters demonstrates the measurement of strain in a pop can using strain gauges.
Higher resistance strain gauges yield a higher sensitivity in the measurement of the strain.
Have the gauge mounted and ready 30 minutes beforehand to eliminate error from temperature change.
The can is initially unopened, and the bridge is balanced such that the output voltage is 0.
The can is then opened:
• The vertically (axially) oriented strain reading changes to -00027, corresponding to = 27 × 10−6 .
• The horizontally (hoop) oriented strain reading changes to -01124, corresponding to = 1124 × 10−6 .
• This change shows that the initial strain in the sealed can was greater in the “hoop” of the can: this
is because there is more surface area in this direction as opposed to the axial direction.
Satyaki Bhattacharjee takes over. In our analysis of the can:
• We assume the change of the diameter of the can between the opened and unopened states is 0.
• We assume that the pressure Pin within the can is equal in all directions.
• We assume that in the unopened state, Pin > Pout , so the can is initially in tension.
• With a caliper, Paul Rumbach has measured the following: t = 10−4 m, R = 0.066 m.
Figure 12.1: The thickness of the can is measured to be t = 10−4 m, while the length is not measured and
arbitrarily chosen as L, because it factors out in determining the hoop stress in Eq. (12.9). There is some
tensile force Th acting in the hoop (out of the page) as a result of the pressure inside Pin . The area that Th
acts on is depicted here, and calculated in Eq. (12.8).
49
50
12.1
Lecture 12: Pop Can Experiment
Hoop Analysis
Figure 12.2: Free body diagram of the forces on a section of the can. The force Fh is resultant from the
pressure differential ∆P = Pin − Pout . The tensile force Th is experienced throughout the hoop of the can;
at every cut along the hoop, Th is tangent to the curvature of the can, as shown.
Σ F = 0 → Fh = 2Th
(12.1)
δθ
θ
R
R
Figure 12.3: To find the force the pressure differential ∆P = Pin − Pout creates on the hoop of the can, we
need to integrate ∆P over the surface area of the hoop, Ah1 . This image represents the integration over one
of the dimensions, and the other is simply the length of the can, L.
Fh = P × Ah1
Z
Fh =
(12.2)
π
RL (Pin − Pout ) δθ
(12.3)
0
Z
Fh = ∆P RL
π
sin(θ) δθ
(12.4)
0
π
Fh = ∆P RL(− cos θ) (12.5)
Fh = ∆P RL(2) = 2Th
(12.6)
Th = ∆P RL
(12.7)
0
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 12: Pop Can Experiment
51
When finding the hoop stress σhoop , we use a different area, Ah2 , the area that T acts on:
Ah2 = t × L
σhoop =
(12.8)
Th
∆P RL
∆P R
=
=
Ah2
tL
t
(12.9)
∆P R
σhoop
=
E
Et
(12.10)
hoop Et
R
(12.11)
Hooke’s Law applied to σhoop :
hoop =
∆P =
For aluminum, E = 69 × 109 Pa, and we know hoop = 1124 × 10−6 , t = 10−4 m, and R = 0.066 m.
We use these parameters with Eq. (12.11) to calculate the gauge pressure:
∆P = 117.51 kPa
To find the pressure inside the can, we know the relation
Pin = ∆P + Pout
(12.12)
where Pout = 1 atm = 101.325 kPa, giving:
Pin = 218.835 kPa
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
52
12.2
Lecture 12: Pop Can Experiment
Axial Analysis
Figure 12.4: The can is “cut” along the plane of the hoop. The pressure differential ∆P acting on the top
and bottom of the can creates another tensile force Ta along the length of the can.
Σ F = 0 → Fa = Ta
(12.13)
The area of the top of the can (Aa1 ) is approximated by considering it to be a circle of radius R:
Aa1 ≈ πR2
(12.14)
Fa = P × A = ∆P πR2
(12.15)
The area of the cross section (Aa2 ) is approximated because the thickness t is so small:
Aa2 ≈ 2πRt
σaxial =
(12.16)
Fa
R∆P
πR2 ∆P
=
=
Aa2
2πRt
2t
(12.17)
σaxial
R∆P
=
E
2Et
(12.18)
2axial Et
R
(12.19)
axial =
∆P =
Using the problem parameters, E = 69 × 109 Pa, t = 10−4 m, R = 0.066 m, and axial = 27 × 10−6 with
Eq. (12.19) to calculate the gauge pressure:
∆P = 5.6454 kPa
Now Eq. (12.12) is used to find Pin :
Pin = 106.97 kPa
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 12: Pop Can Experiment
12.3
53
Conclusions
Before beginning our experiment, we assumed that the pressure would act equally in all directions within the
can: Pin and therefore ∆P should be the same in both the hoop and axial analysis, but are not. combining
Eq. (12.10) and Eq. (12.18), we can derive the following theoretical expression:
axial =
1
hoop
2
(12.20)
Comparing this to our original strain measurements from the gauges, we can see that this equation does not
hold for the true values hoop = 1124 × 10−6 and hoop = 27 × 10−6 . This means our calculations leading to
the strain equations were erroneous, namely in the calculation of the areas in the axial analysis. The top of
the pop can has an odd shape with inconsistent cross-sections along the can’s axis, so the radius R is not
exactly what we thought in Eq. (12.14). Also, the stiffness is greater in both the top and bottom of the can
because it is thicker, so t is also inconsistent.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
54
M. R. Buche 2015
Lecture 12: Pop Can Experiment
AME 20213: Measurements and Data Analysis
Lecture 13 — Intro to Digital Signal
Last lecture, Kevin Peters had the strain gauges attached to a blue box:
Figure 13.1: Diagram of the blue box. RS represents the resistance given by the strain gauge (changes later
with elongation) and Rref is what is changed to initially balance the bridge. Vout is then filtered, converted
from analog to digital, and displayed to represent strain.
13.1
More About Amplifiers
−Vcc < Vout < +Vcc
Remember: an amplifier cannot amplify past Vcc (clipping).
55
Vout
=G
Vin
(13.1)
56
13.2
Lecture 13: Intro to Digital Signal
Binary Numbering
FLOPS - float point operations per second.
16-bit float point variables: 216 = 65,536 binary places.
32-bit (double): 232 ≈ 4,300,000,000 binary places.
13.3
Digital to Analog
Inside your iPhone, the memory (binary) is converted from digital to analog (voltages) and sent to your
speaker/headphones.
Signal is not a smooth wave, it has discrete voltages.
You want to maximize the sampling frequency to maximize data/audio quality, but that takes up more
memory space.
Example is IPv4 - data broken up into packets, sent, and reassembled - not the most efficient way because
real-time things would work better without disassembly.
China has all internet requests go through a router - ”the great firewall of china” - blocks requests for
youtube, facebook, etc.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 14 — More Digital Signal
14.1
Digital Electronics
8 bits = 1 byte → can represent numbers 0 - 255: 3 decimals of precision (3 places to put the decimal on
the number 255).
16 bits = 2 byte → can represent numbers 0 - 65,535: 5 decimals of precision.
Float-point numbers: uses 32-bits to represent numbers (single precision). 1 bit for the sign, 8 bits for the
exponent, 23 bits for the fraction.
±(fraction) × 10exponent
(14.1)
Double precision: 1 bit for the sign, 11 bits for the exponent, 52 bits for the fraction.
1012 FLOPS = “terraflop”
1015 FLOPS can be achieved from distributed computing.
14.2
A/D and D/A
Example: digital phone service cell phone / VOIP.
The phone takes input from the microphone, converted from analog to digital signal via the A/D, is put
through the transceiver. The digital signal is discrete samples of the sound waveform; the faster the sampling
rate, the better the sound quality. The transceiver compresses the sound data - about 10 ms of sound is
compressed into 1 ns of voltage - into a digital pulse train (packets). The packets are sent through a router
and the ”world wide web” to the destination and reassembled, converted to analog V (t) for the speaker.
This process is not efficient; there is some talk of creating ”fast lanes” for constant-streaming applications
like Netflix, to avoid dismantling packets and have direct lanes through the web.
55
56
M. R. Buche 2015
Lecture 14: Intro to Digital Signal
AME 20213: Measurements and Data Analysis
Lecture 15 — E3 and Engine Analysis
15.1
Experiment 3
Michael Johnson discusses topics of Experiment 3:
15.1.1
Thermocouples
Newton’s Law of Cooling for rate of heat transfer is given by
Q̇s = hAs (T∞ − T )
(15.1)
where T is the temperature of the object of interest, T∞ is the ambient temperature, h is a material constant,
and As is the surface area of the object of interest.
The metals used in the thermocouple are incompressible, so their specific heat Cν is constant, such that
Q̇s = mCν
dT
dt
(15.2)
Combining Eq. (15.1) and (15.2),
mCν
dT
= hAs (T − T∞ )
dt
(15.3)
Solving for T ,
T (t) = T∞ + (To − T∞ )e(−t/τ )
where the time constant τ is given by:
τ=
mCν
hAs
(15.4)
(15.5)
and τ is constant for incompressible materials (solids, liquids). Fig. (15.1) shows an example of T (t).
Rearranging Eq. (15.4),
e−t/τ =
T (t) − T∞
To − T∞
57
(15.6)
58
Lecture 15: E3 and Engine Analysis
Figure 15.1: Example curve of T (t) for the cooling of an object to ambient temperature T∞ .
In order to make this relation linear, the equation becomes:
T (t) − T∞
−t
y(t) =
= ln
τ
To − T∞
(15.7)
where −1/τ is the slope of the line.
15.1.2
Piezoelectric Ultrasonic Transducers
Voltage induces deformation in piezoelectric materials, and visa-versa. AC voltage causes piezoelectric material to expand and contract; when put inside a speaker, this creates sound waves.
One can model the sound wave response using a mass-spring model:
mẍ = −kx
(15.8)
where m is the mass, ẍ is its acceleration, k is the spring constant, and x is the spring displacement.
The resonance frequency ωn of the system is given by:
r
ωn =
k
m
(15.9)
Consider a forced-mass-spring-damper system:
mẍ = −kx − γ ẋ + Fo sin ωt
(15.10)
ẍ + 1/τ ẋ + ωn 2 = Fo /m sin ωt
(15.11)
and simplifying,
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 15: E3 and Engine Analysis
59
where τ = γ/m and ωn 2 = k/m
x(t) =
Fo sin ωt
p
2
m (ω − ωn 2 )2 + (ω/τ )2
(15.12)
but for this experiment, we will use the simplified model:
x(t) = A(ω) sin ωt
(15.13)
”Full width at half max” - ∆ω:
√
∆ω =
15.1.3
τ
3
(15.14)
Baseball Bat
Figure 15.2: Strain gauge mounted on baseball bat; after initially displaced and released, the bat’s displacement oscillates, and therefore the strain oscillates accordingly.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
60
15.2
Lecture 15: E3 and Engine Analysis
Engine Cylinder Analysis
Paul takes over and shows a ”4-stroke engine” - the ambient temperature inside the cylinder T∞ is more
difficult to find since it varies with time. Consider trying to measure the ambient temperature inside the
cylinder T using a thermocouple:
T∞ varies sinusoidally with time, according to some constant k:
T∞ (t) = k sin ωt
(15.15)
Using Eq. (15.3), the equation for a thermocouple, with Eq. (15.15):
mCν dT
= k sin ωt − T
hAs dt
(15.16)
And finally, using Eq. 15.5:
dT
+ T = k sin ωt
dt
This is a first-order response (involves a first-order differential equation).
τ
(15.17)
Measuring the ambient temperature T∞ with the thermocouple yields both a different amplitude and phase
than the true T∞ , shown in Figure 16.2.
Figure 15.3: The heat transfer involving the thermocouple is not instantaneous, therefore the thermocouple
temperature Tthermocouple will lag behind the oscillating ambient temperature T∞ , yielding a different phase.
The lag also causes the smaller amplitude of Tthermocouple , because the thermocouple is unable to reach the
peak temperatures of T∞ before it reverses its direction on the oscillating curve.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 16 — Transient Response
16.1
1st Order Response - Thermocouple
+
V
.
Qs
-
.
Qin
T
.
Qout
T
Figure 16.1: Two metals form a junction and induce a voltage based on Q̇s .
Q̇s = Q̇in − Q̇out
(16.1)
Newton’s Law of Cooling, a first order ordinary differential equation (ODE):
mCν
dT
= hAs (T∞ − T )
dt
(16.2)
Solve using an initial condition T (t = 0) = To .
T (t) = T∞ + (To − T∞ )e−t/τ
τ=
mCν
hAs
(16.3)
(16.4)
The coefficient of convective heat transfer h varies with substance.
The mass of the tip of thermocouple m is given by:
m = ρV =
61
2 3
πr ρ
3
(16.5)
62
Lecture 16: Transient Response
and the surface area As ,
As = 2πr2
(16.6)
ρrCν
3h
(16.7)
such that the Eq, (16.4) becomes:
τ=
At t = τ , T is at 63% of (To − T∞ ).
16.1.1
Linearization
T (t) − T∞
= e−t/τ
To − T ∞
−t
T (t) − T∞
=
y(t) =
To − T ∞
τ
(16.8)
(16.9)
The slope of the linear transformation is −1/τ , and this slope is negative for both cooling and heating.
τ is the fastest the thermocouple can instantaneously measure T (t), it will lag for sampling ∆t < τ .
16.2
Driven 1st Order Response - Engine Cylinder
The temperature inside the engine T ∞ changes with time:
T∞ (t) = k sin(ωt)
mCν
(16.10)
dT
= hAs (k sin(ωt) − T )
dt
(16.11)
mCν
hAs
(16.12)
τ=
dT
+ T = k sin(ωt)
dt
ωτ k
k
T (t) = To +
e−t/τ + p
sin(ωt + φ)
2
(ωτ ) + 1
(ωτ )2 + 1
τ
(16.13)
(16.14)
φ = arctan(−ωτ )
(16.15)
k
T (t) = p
sin(ωt + φ)
(ωτ )2 + 1
(16.16)
For t >> τ , the thermocouple measures:
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 16: Transient Response
63
Figure 16.2: The heat transfer involving the thermocouple is not instantaneous, therefore the thermocouple
temperature Tthermocouple will lag behind the oscillating ambient temperature T∞ , yielding a different phase.
The lag also causes the smaller amplitude of Tthermocouple , because the thermocouple is unable to reach the
peak temperatures of T∞ before it reverses its direction on the oscillating curve.
If ωτ << 1, ω << 1/τ , the thermocouple measures T∞ exactly, so there is no phase shift or amplitude
difference:
T (t) = k sin(ωt) = T∞ (t)
Magnitude ratio M between |T∞ (t)| and |T (t)| is given by:
T = p 1
M = T∞ (ωτ )2 + 1
(16.17)
(16.18)
Dynamic error δ is given by:
δ =1−M
16.2.1
(16.19)
2nd Order Response - Baseball Bat
A damped harmonic oscillator:
m
dx
d2 x
+γ
+ kx = F
2
dt
dt
(16.20)
Natural resonance (ringing) frequency ωn ,
r
k
m
(16.21)
k γ 1−
m
4km
(16.22)
ωn =
Damped resonance frequency ωd ,
r
ωd =
Damping ratio ζ,
ζ=√
AME 20213: Measurements and Data Analysis
γ
4km
(16.23)
M. R. Buche 2015
64
Lecture 16: Transient Response
Under Damped Case - ”ringing” like the baseball bat experiment: γ <
√
4kmandζ < 1.
x(t) = Ae−γt sin(ωd t + φ)
(16.24)
Figure 16.3: Under damped example; strain gauge mounted on baseball bat; after initially displaced and
released, the bat’s displacement oscillates, and therefore the strain oscillates accordingly.
Critically Damped Case: γ =
Over Damped Case: γ >
√
√
4kmandζ = 1.
x(t) = A[1 − eωn t (1 + ωn t)]
4kmandζ > 1.
"
x(t) = A 1 − e
−γt
cosh(ωd t) p
γ
γ 2 − 4km
(16.25)
!#
sinh(ωd t)
(16.26)
Figure 16.4: Example plot of both critically and over damped cases. Imagine the mass on the spring is
traveling through a highly viscous fluid, and slowly approaches steady state.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 16: Transient Response
16.3
65
Driven 2nd Order System - Piezoelectric Pressure Transducer
F varies sinusoidally:
F (t) = k sin(ωt)
(16.27)
d2 x
dx
+γ
+ kx = k sin(ωt)
2
dt
dt
(16.28)
A sin(ωt + φ)
x(t) = p
2
(ω − ωn 2 )2 + (ω/τ )2
(16.29)
m
τ=
ωn
2γ
=
2
m
2ζ
(16.30)
Full width at half max (FWHM) is ∆ω:
√
3
(16.31)
τ
x(ω)
∆ω =
max
∆ω
1/2 max
ωn
ω
Figure 16.5: FWHM or ∆ω is the width shown between the curve at half the maximum value of x(ω).
Magnitude ratio M (ω) for this system:
1
M (ω) = p
1 − (ω/ωn )2 + (2ζω/ωn )2
(16.32)
and phase φ,
φ(ω) = arctan
AME 20213: Measurements and Data Analysis
2ζ(ω/ωn )
1 − (ω/ωn )2
(16.33)
M. R. Buche 2015
66
M. R. Buche 2015
Lecture 16: Transient Response
AME 20213: Measurements and Data Analysis
Lecture 17 — Examples, Uncertainty
17.1
Internal Combustion Engine Example
The engine is running at 3,000 RPM, and a τ = 0.1 s thermocouple is used to measure T (t). What is the
magnitude ratio and phase of T relative to T∞ ?
ω = 2πf = (2π)(3000)
rev 1min
= 314 rad/s
min 60s
Using Eq. (16.18),
M=p
1
M = 0.032
(314 × 0.1)2 + 1
This M yields a δ of 97% using Eq. (16.19), which is way off!
Using Eq. (16.15),
φ = −88.2◦
φ = arctan[(−314)(0.1)]
17.2
Pressure Transducer Example
Problem 6 on Page 231 of the text.
Pressure transducers on sides of aircraft wings with ωn = 6284 rad/s and ζ = 2.0. To ensure accuracy, we
require that M (ω) ≥ 0.707 and |φ| ≤ 20◦ . What is the maximum frequency in Hz within those bounds?
Both constraints must be considered. Using Eq. (16.32),
ω < 1, 676 rads/
f = 266.7 Hz
Using Eq. (16.33),
ω < 567 rad/s
The maximum frequency f is then 90 Hz.
67
f = 90 Hz
68
17.3
Lecture 17: Examples, Uncertainty
Design Stage Uncertainty
Chapter 7 in the text, useful for comparing sensors. x is something that is measured:
x = x̄ ± ux
(17.1)
where x̄ is the estimated true mean of the measurement, and ux is the uncertainty in x.
Remember error versus uncertainty from Lecture 5.
Accuracy - how far off the measurement is from the true value (high accuracy = close to true value).
Precision - how spread out the various measurements are (high precision = low spread), usually quantified
by standard of deviation.
17.3.1
Different Sources of Error/Uncertainty
Resolution - Ures - half of the smallest division of measurement.
Repeatability - UR - related to precision and standard of deviation; random error.
Linearity - UL - how much the output deviates from a theoretically linear response.
Zero Shift or Offset - UZ - difference between 0 and the function value at 0.
Hysteresis - UH - output is different depending on the path taken to the current point.
Total Uncertainty - UI - add everything “in quadrature”.
q
UT = Ures 2 + UR 2 + UL 2 + UZ 2 + UH 2
(17.2)
UR is from statistics, and Ures , UL , UZ , UH are baseline instrument uncertainties.
17.3.2
Example 1, from Text
Pressure transducer with a full scale of operation FSO = 100 psi, resolution of 0.1 psi, repeatability of 0.1
psi, linearity of 0.1 %, and a thermal drift less than 0.1 psi over 6 months at 32◦ to 90◦ .
Analyzing: Ures = 0.1, UR = 0.1, UZ = 0.001(100) = 0.1, UD = 0.1, so using Eq. (17.2),
p
UT = 0.2 psi
UT = 0.12 + 0.12 + 0.12 + 0.12
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 18 — More About Uncertainty
18.1
Example 2
Pressure transducer that outputs a voltage measured by a digital multimeter. Data sheets for both the
pressure transducer and multimeter are considered. For the multimeter, UDM M = ”0.5 % reading + 2
digits”. For the pressure transducer, VF SS = 4.6 V (full scale span: range of output voltages), so one uses
the 20.00 V range on the DMM.
UDM M = (0.0005)4.6 + 0.02
UDM M = 0.043 V
UA = 1.5%VF SS = 0.015(4.16)
UZ = 0.25%VF SS = 0.0025(4.16)
q
UT 0 = UDM M 2 + UA 2 + UZ 2
UA = 0.07 V
UZ = 0.0115 V
UT 0 = 0.082 V
But since the data sheet gives a coefficient of sensitivity of kp = 12.1 mV/kPa for the pressure transducer,
UT =
18.2
0.082
UT 0
=
kp
0.0121
UT = 6.8 kPa
Uncertainty Propagation
Given x, x̄, and Ux , one wants to compute f (x̄), and this is how one gets Uf based on Ux :
Uf =
δf Ux
δx x=x̄
(18.1)
Given many variables (x, y, z), finding f (x̄, ȳ, z̄) and then Uf :
s
Uf =
δf
Ux
δx
2
+
δf
Uy
δy
69
2
+
δf
Uz
δz
2
(18.2)
70
18.2.1
Lecture 18: More About Uncertainty
Example 3: Pitot Static Probe
Remember Bernoulli’s Law:
s
v=
2∆P
ρair
(18.3)
Given: Ps = 101 kPa, Po = 85 kPa, ρair = 1.225 kg/m3 , one can calculate v = 162 m/s. What is Uv given
UP o = UP s = 6.8 kPa? (the uncertainty from the last example)
r
1
δV
2
√
=
δPs
ρair 2 Ps − Po
r
δV
2
−1
√
=
δPo
ρair 2 Ps − Po
s
2 2
δV
δV
UP s +
UP o
Uv =
δPs
δPo
s r
2 r
2
2
2
UP s
−U
√
√ Po
Uv =
+
ρair 2 Ps − Po
ρair 2 Ps − Po
s
Ups 2 + Upo 2
√
Uv =
2ρair Ps − Po
Plugging in values: Uv ≈ 49 m/s, so
V = 162 ± 49 m/s
18.2.2
Formulas
For addition f (x, y) = x + y, or subtraction f (x, y) = x − y,
δf
δf
=
=1
δx
δy
q
Uf = (Ux )2 + (Uy )2
(18.4)
For multiplication f (x, y) = xy, one adds the relative uncertainties in quadrature:
f
δf
f
δf
=y= ,
=x=
δx
x
δy
y
s
2 2
f Uy
f Ux
Uf =
+
y
x
s 2
2
Uf
Uy
Ux
=
+
f
y
x
(18.5)
Division F (x, y) = x/y yields the same result as multiplication:
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 18: More About Uncertainty
−f
−x
δf
1
f
δf
= 2 =
,
= =
δx
y
y
δy
y
x
s
2 2
f Uy
f Ux
Uf =
+
y
x
s 2
2
Uy
Ux
Uf
+
=
f
y
x
AME 20213: Measurements and Data Analysis
71
(18.6)
M. R. Buche 2015
72
M. R. Buche 2015
Lecture 18: More About Uncertainty
AME 20213: Measurements and Data Analysis
Lecture 19 — Tech Memo 3, Uncertainty
19.1
Experiment 3 Plots
The finished lab reports for Experiment 3 will be expected to have 5 plots:
1. Figure 1a: T (t) for both cooling and heating of the thermocouple, on one plot.
2. Figure 1b: Curve fit y(t) for both cooling and heating, on one plot.
3. Figure 2: V (ω) for piezoelectric pressure transducer plotted as individual points, with curve fit (see
addendum on lab website).
4. Figure 3: V (t) for baseball bat data as individual points with curve fit from Eq. (16.24).
5. Figure 4: FFT gives two plots: V (f ) and φ(f ) (remember to convert f to ω). Figure 4 will be the
FFT V (ω); φ(ω) is unnecessary.
? If something looks silly with individual data points (because there is so many), one can use a
continuous line if it is still distinguishable from the curve fit line (different colors).
19.2
Experiment 3 Uncertainty
19.2.1
Uncertainty in Tau Uτ
How does one find the uncertainty in τ ? Remember that the slope of the linear fit is -1/τ :
s
2
Uτ
Uslope
Uslope
=
=
τ
slope
slope
Uτ =
19.2.2
Uslope
slope
τ
Thermocouple
After using a curve fit to find the calibration constant k in V = kT , say k = 10 ± 0.2 mV/◦ C.
73
(19.1)
74
Lecture 19: Tech Memo 3, Uncertainty
UV = UDM M = “0.5% + 2digits00
Say the measurement is 0.563 V,
UV = (0.005)(0.563 V ) + 0.002 V = 0.005 V
Uk = 0.2mV◦ C
Using Eq. (18.5),
UT
= 0.022,
T
UT = (0.022)(56.3) ≈ 1.2 ◦ C
T = 56.3 ± 1.2 ◦ C.
19.3
Repeatability UR
Uncertainty due to statistical variance in N different trials. The highest probability will be at the mean.
mean = x̄ =
N
X
xi
N
v
uN
uX (xi − x̄)2
standard deviation = σ = t
N
i=1
(19.2)
i=1
UR = √
σ
N −1
(19.3)
(19.4)
If something reports ”68% confidence” it corresponds to a 68% chance that the measured value will be within
±UR of the mean.
N refers to the number of trials, not necessarily the number of individual points.
Ensemble - a collection of N different data sets obtained by repeating the experiment N times.
For large N ,
σ
UR ≈ √
N
(19.5)
Diminishing returns on UR : for UR → 12 UR , one needs N → 4N.
19.4
Confidence Intervals
Remember Eq. (19.4), which gives 68% confidence that the measured values will fall in the uncertainty.
tν,c% σ
UR,c% = √
N −1
M. R. Buche 2015
(19.6)
AME 20213: Measurements and Data Analysis
Lecture 19: Tech Memo 3, Uncertainty
75
where tν,c% is found in a table (in the back of the text), and ν = N − 1. This can be used to find different
confidence intervals like 95% instead of 68%, which increases the uncertainty.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
76
M. R. Buche 2015
Lecture 19: Tech Memo 3, Uncertainty
AME 20213: Measurements and Data Analysis
Lecture 20 — Signal Characteristics
Given any signal that oscillates with time, it can be described using a DC component (average value) x̄ and
AC component (amplitude) xAC (t):
x(t) = x̄ + xAC (t)
(20.1)
Feeding the x(t) signal into an integrator (low-pass filter) will yield an output voltage x̄.
Feeding x(t) into a differentiator (high-pass filter) will yield an output voltage xAC (t).
20.1
Statistical Parameters - Table 8.1
A continuous mean is given by
1
x̄ =
T
Z
T
x(t) dt
(20.2)
0
while a discrete mean is given by
x̄ =
N
1 X
xi
N i=1
(20.3)
and this is what an integrator circuit does.
For continuous variance (standard deviation squared)
1
σ =
T
2
Z
T
1
(x(t) − x̄) dt =
T
2
0
Z
T
xAC 2 (t) dt
(20.4)
0
and for discrete variance
σ2 =
N
1 X
(x̄ − xi )2 dt
N i=1
(20.5)
For continuous root mean squared (RMS)
s
RMS =
1
T
Z
77
0
T
x(t)2 dt
(20.6)
78
Lecture 20: Signal Characteristics
and discrete root mean squared (RMS)
v
u N
u1 X
RMS = t
xi 2
T i=1
(20.7)
For continuous ’nth moment
µn =
1
T
T
Z
(x(t) − x̄)n dt =
0
Z
1
T
T
(xAC (t))n dt
(20.8)
0
and for discrete ’nth moment
µn =
20.1.1
N
1X
(xi − x̄)n
T i=1
(20.9)
Variance Associated with Energy Dissipation
Joule heating:
q̄ =
1
T
Z
T
I 2 (t)Rdt =
0
1
T
Z
0
T
V 2 (t)
dt
R
(20.10)
Kinetic energy of a fluid:
1
Ēk =
T
20.2
Z
T
0
1 2
ρU (t) dt
2
(20.11)
Fourier Analysis
Remember Fourier’s Theorem - any function f(t) can be represented as a sum of sines and cosines with
various frequencies. Fourier’s Transform gives frequency components of the signal.
Z ∞
1
V (ω) =
V (t)e−iωt dt
(20.12)
2π −∞
Recall that
e−iωt = cos(ωt) − i sin(ωt)
(20.13)
so Eq. (20.12) becomes
V (ω) =
1
2π
Z
∞
V (t)[cos(ωt) − i sin(ωt)] dt
(20.14)
−∞
For the phase,
φ(ω) = arctan
M. R. Buche 2015
Im[V (ω)]
Re[V (ω)]
(20.15)
AME 20213: Measurements and Data Analysis
Lecture 20: Signal Characteristics
79
R∞
φ(ω) = arctan
V (t) sin(ωt) dt
R −∞
∞
V
−∞
!
(t) cos(ωt) dt
(20.16)
For the amplitude,
|V (ω)|2 =
1
|V (ω)| =
2π
2
sZ
∞
p
(Re[V (ω)])2 + (Im[V (ω)])2
2 Z
V (t) cos(ωt) dt +
−∞
AME 20213: Measurements and Data Analysis
∞
2
V (t) sin(ωt) dt
(20.17)
(20.18)
−∞
M. R. Buche 2015
80
M. R. Buche 2015
Lecture 20: Signal Characteristics
AME 20213: Measurements and Data Analysis
Lecture 21 — FFT and Reverse FFT
Homework 4, problem 3b: make sure to use a student’s t value for 95% confidence.
21.1
Fast Fourier Transform
This is a discrete version of the Fourier Transform, and it uses a Riemann Sum to approximate the integral
(DFT or FFT). It does this by finding the areas of many rectangles under the curve, since the integral
essentially finds the area. If enough small rectangles are used, the approximated integral approaches the
true value.
Re [V (ω)] =
1
2π
Z
∞
V (t) cos(ωt) dt ≈
−∞
V (ω) ≈
1
2π
Z
T
V (t) cos(ωt) dt
(21.1)
0
N
1 X
y(tj ) cos(ωi tj )∆t
2π j=1
(21.2)
DFT turns into a matrix operation, with ”kernel matrix” F or Fi,j :
V (ωi ) = Vi = Fi,j yi
(21.3)
~t = V
~ω
FV
(21.4)
Fi,j = cos(ωi tj )
F11
F21
...
FN 1
F12
F22
...
...
∆t
2π
...
V (t1 )
...
...
... ...
FN N
V (tN )
81
(21.5)
V (ω1 )
...
=
...
V (ωN )
82
21.2
Lecture 21: FFT and Reverse FFT
Data Acquisition
The sampling period is T , the sampling frequency is fs , the time between two data points is ∆t = 1/fs , the
number of samples is N .
T = N ∆t =
21.2.1
N
fs
(21.6)
Nyquist Criterion
One cannot resolve frequencies that are less than half of the sampling frequency (need 2 points per period).
fs
(21.7)
2
Aliasing - results when the Nyquist Criterion is not met; signal components with frequencies greater than
fmax show up as low frequency components in the DFT of the data; ”undersampling”.
fmax =
Paul Rumbach shows an example of sine wave data that has a sampling frequency less than the frequency
of the sine wave - result is a much lower frequency sine wave.
21.3
DFT in MATLAB
Where y and t are measurements from the baseball bat lab.
F = fft(y);
R = abs(F);
phi = atan(imag(F)./real(F));
N = length(t);
T = t(N) - t(1);
fs = N/T;
freq = 1/T : 1/T : fs;
plot(freq,R)
xlabel(’frequency, [Hz]’)
ylabel(’amplitude’)
semilogy(freq,R)
%
%
%
%
%
%
%
%
Built in function in MATLAB
Magnitude of amplitude
Phase [rad]
Number of data points
Sampling period [s]
Sampling frequency [Hz]
Iterate frequency from 1/T to fs, steps 1/T
Plot frequency versus relative amplitude
% Better representation of mirror images
Two peaks (resonance frequencies), one at ≈170 Hz, and a ”mirror image” at the end. Everything beyond
fs /2 is a mirror image, and can be ignored (bogus!) because all those frequencies do not meet the Nyquist
Criterion and are therefore invalid.
21.4
Reverse Fourier Transform
Takes an FFT back to the time domain; used a lot in compressing information.
F −1 [V (ω)] = V (t)
Z
(21.8)
∞
V (t) =
V (ω)eiωt dω
(21.9)
−∞
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 21: FFT and Reverse FFT
21.4.1
83
Digital Filtering
Example: MP3 file compression! A digital audio file, which is a waveform V (t), is compressed into V (f )
using DFT. The ultrasonic range (f > 20 kHz) is incoherent to the human ear (the eardrum resonance
frequency is much lower), so these frequencies in the ultrasonic ranges are replaced with zeros - this is done
with a ”window function” w(f ) which assigns 1 to f < 20 kHz and 0 to f > 20 kHz.
V 0 (f ) = w[V (f )]
(21.10)
The new file V 0 (f ) is saved this way, using less memory than the original. Then a ”codec” is used to perform
reverse DFT to get V 0 (t), which has original high frequencies filtered out. This process is also popularly
used to compress images.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
84
M. R. Buche 2015
Lecture 21: FFT and Reverse FFT
AME 20213: Measurements and Data Analysis
Lecture 22 — Spectral Density, Music
22.1
Spectral Density
Spectral density - V (ω) - units of V (t) per angular frequency.
Power spectral density - PSD
PSD = |V (ω)|2
(22.1)
The ”power” aspect is just because many situations analyzed in this fashion involve power, like joule heating
or the kinetic energy of a fluid.
22.2
Periodic Functions
Review Lecture 9 - square waves, saw-toothed waves, etc. Remember: periodic functions are defined by
f (t) = f (t + T )
(22.2)
Recall that FFT gives peaks at the fundamental frequency and each harmonic or overtone (Page 31).
Review Fourier’s Theorem - periodic functions can be written as a series of discrete fourier components.
22.2.1
Music Theory
Musical notes all have a fundamental frequency f1 and overtones fn = nf1 .
Octaves - a note ”one octave” higher than another is double the frequency of it.
Note
C4
C5
C6
C7
f1 [Hz]
262
525
1046
2093
Table 22.1: Examples of frequencies of C octaves.
85
86
Lecture 22: Spectral Density, Music
Notes that make up chords are chosen based on how their frequencies match up with each other!
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 23 — Noise, Transient Statistics
23.1
Fourier Analysis in Broad Applications
Standing waves arise in solid mechanics, so Fourier analysis is important for this. Recall the Tacoma Narrows
Bridge collapse of 1940, or a vibrating string.
Fourier analysis is also important for digital music applications: why certain notes sound good together as
chords, frequency filters, visualizers and equalizers, etc.
Image processing applications as well: compressing and filtering through things like window functions, finger
print analysis, image enhancing, and more.
Turbulence (stochastic flow) is a very complex phenomenon in nature, and the Fourier transform reveals
underlying mathematical structures in turbulence. Kolmogorav’s Power Law comes from the power spectral
density of a pitot static probe in stochastic flow:
|U (ω)|2 ∝ ω −5/3
(23.1)
This type of analysis can be applied to the stock market: ”Pink Noise” power law:
|f (ω)|2 ∝ ω −2
(23.2)
Microwave radiation left over from the Big bang still persists today. Measuring this radiation tells us a lot
about the universe. The Planck telescope radiation map can be used with a special Fourier Transform called
a ”multipole expansion” reveals an underlying structure.
23.2
Noise
Noise is an unwanted AC component in any signal.
White Noise - evenly distributed over all frequencies (constant PSD). Primary sources:
• Johnson Noise - noise due to random thermal motion of the charge carriers in a wire. For frequencies
less that 80 GHz,
PSD = |V (f )|2 = 4RkT
(23.3)
87
88
Lecture 23: Noise, Transient Statistics
|V (f)|2
f
Figure 23.1: Plot of power spectral density |V (f )|2 of a signal with white noise.
where R is the resistance, k is the Boltzmann constant, and T is the temperature in Kelvin. This is
why electronics perform best at low temperatures. For a resistor, the power P of the noise is given by
P = 4kT ∆f
(23.4)
kT
C
(23.5)
and for a capacitor PSD is given by
|V (f )|2 =
• Shot Noise - noise due to the discrete electrons or photons.
Pink Noise - has a PSD given by
|V (ω)|2 ∝ ω −2
(23.6)
which has a ”self-similar nature” where the repeating patterns are made up of the same repeating patterns,
and so on - a fractal structure.
|V (f)|2
f
Figure 23.2: Plot of power spectral density |V (f )|2 of a signal with pink noise.
Some say turbulence is a form of pink noise, because it has this self-similar nature, but those who study it
know it is actually not pink noise.
23.3
EM Shielding
Electromagnetic Interference (EMI) - wires, especially loops, behave as antennae and pick up frequencies from passing electromagnetic waves. If the interference is ”coherent” (one frequency, like the 60 Hz from
a wall outlet) a notch filter can be used to filter it out.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 23: Noise, Transient Statistics
89
Faraday Cage - the circuit or electronic being shielding is placed inside a grounded metal box, and all
electromagnetic waves that hit it from the outside are grounded and unable to reach the circuits inside.
Coaxial Cables - like the Bayonet Neil-Concelman (BNC) connector, which is essentially a signal carrying
wire inside a grounded metal jacket: Faraday’s Cage applied to a cable.
23.4
Transient Statistics
Running Average - average all previous data points leading up to the present time tn :
V̄R (tn ) =
n
X
V (ti )
i=1
(23.7)
n
Moving Average - sets each data point equal to the average of the adjacent data points:
V̄M (tn ) =
n+N
X
V (ti )
N
(23.8)
2
V (ti ) − V̄R (tn )
n
(23.9)
i=n−N
Running Standard Deviation
σR (tn ) =
n
X
s
i=1
where the running average V̄R (tn ) can be seen in the numerator.
Moving Standard Deviation
σM (tn ) =
n+N
X
s
i=n−N
2
V (ti ) − V̄M (tn )
N
(23.10)
where the moving average V̄M (tn ) can be seen in the numerator.1
1 Originally
2N in the denominator - corrected off a hunch.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
90
M. R. Buche 2015
Lecture 23: Noise, Transient Statistics
AME 20213: Measurements and Data Analysis
Lecture 24 — Probability
Probability of an event A occurring: P (A), and probability of A not occurring: P (A0 ).
P (A0 ) = 1 − P (A)
(24.1)
Probability of either A or B occurring (union): P (A ∪ B).
Probability of both A and B occurring (intersection): P (A ∩ B).
24.1
Venn Diagrams
Probability of event A occurring is given by the area in the circle A, while P (A0 ) is all area not in circle A,
P (A ∩ B) is all area intersected by A and B (purple), and P (A ∪ B) is all area in both A and B.
P (A ∪ B) = P (A) + P (B) − P (A ∩ B)
(24.2)
and the intersection is subtracted off to prevent it from being counted twice, since it is in both areas.
A
B
Mutually Exclusive - it is impossible for both A and B to both occur: no intersection.
P (A ∩ B) = 0.
A
(24.3)
B
91
92
Lecture 24: Probability
Independent Events - the outcome of A has no influence on the outcome of B.
Gambler’s Fallacy - assuming that losing a lot means that one is due for a win.
24.1.1
Example: Coins
What is the probability of two coin tosses both coming up as heads?
It is known that P (A) = P (B) = 1/2, where A is the first and B the second toss,
P (A ∩ B) = P (A) × P (B) =
1
= 25%
4
What is the probability that both will be heads H or tails T ?
P (H) = P (T ) = 1/4, and the two events are mutually exclusive for each toss, P (H ∩ T ) = 0,
P (H ∪ T ) = P (H) + P (T ) − P (H ∩ T ) =
24.2
1
1 1
+ − 0 = = 50%
4 4
2
Conditional Probability
Probability that A will occur given that event B did occur: P (A|B).
P (A ∩ B) = P (B) × P (A|B)
P (A|B) =
24.2.1
P (A ∩ B)
P (B)
(24.4)
(24.5)
Example: Kings
What is the probability of drawing two kings in a row from a deck of 52 cards?
Probability of drawing first king, event B,
P (B) =
4
1
=
52
13
and probability of drawing second king, event A, given that B has happened,
P (A|B) =
3
51
so the probability of drawing two in a row, the intersection:
P (A ∩ B) = P (B) × P (A|B) =
M. R. Buche 2015
1
3
1
×
=
≈ 0.45%
13 51
221
AME 20213: Measurements and Data Analysis
Lecture 24: Probability
24.2.2
93
Measuring Probability
νA
N
where νA is the number of times event A occurs and N is the number of total events observed.
P (A) =
24.2.3
(24.6)
Example: April Showers
If it rained 10 times in April, what is the probability of it raining on any given day in April?
P (A) =
24.3
10
1
= ≈ 33.33%
30
3
Mean or Expectation Value
Average value x̄ or < x >:
n̄ =< n >=
X
nP (n)
(24.7)
n
Normalization: the sum of all probabilities equal one:
X
P (n) = 1
(24.8)
all n
24.3.1
Example: Dice
n
P (n)
1
1/6
2
1/6
3
1/6
4
1/6
5
1/6
6
1/6
Table 24.1: Example: rolling a six-sided die.
What is the mean or expected value to be rolled?
< n >=
6
X
nP (n) = 1
n=1
=
1
1
1
+2
+ ...6
6
6
6
1 + 2 + ...6
= 3.5
6
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
94
M. R. Buche 2015
Lecture 24: Probability
AME 20213: Measurements and Data Analysis
Lecture 25 — Binomial Distribution,
Homework 5.1
Dice experiment: the dice was rolled N = 58 times, and the average value measured was < n > = 4.13, so
what is the uncertainty in this measurement?
25.1
Binomial Distribution
ρ(νA ) =
N!
PA νA (1 − PA )N −νA
(N − νA !)(νA !)
(25.1)
where N is the total number of trials, νA is the number of times even A occurs, and P (A) is the probability
of a single trial yielding A.
25.1.1
Poisson’s Statistics
ν A = PA N
(25.2)
p
(25.3)
σ=
PA N
and relative uncertainty,
1
UνA
σ
1
=√
=
=√
νA
νA
νA
PA N
(25.4)
So for any counting experiment, the relative uncertainty in the number of counts νA is given by one over the
square root of νA .
25.1.2
Example: Axels
Axels are put through a stress test, and 15 out of 100 fail the test. What is the probability of failure, and
the uncertainty in it?
15
νF
=
= 0.15
N
100
1
1
=√
= √ ≈ 0.26
νF
15
P (F ) =
UνF
νF
95
96
Lecture 25: Binomial Distribution, Homework 5.1
UP (F ) = (0.26)(0.15) ≈ 0.04
P (F ) = 0.15 ± 0.04
From this example, the equation can be written:
√
UP (A) =
νA
N
(25.5)
Large sample sizes are needed for small uncertainties: 10,000 for 1%!
25.1.3
Example: Dice
How many rolls does one need to get 1% uncertainty in probability measurement?
It is known that P (n) ≈1/6, and νA = 10, 000 for 1% uncertainty,
N=
25.2
10, 000
νA
=
= 60, 000 rolls
P (n)
1/6
Homework 5 Help
Problem 1 of Homework 5:
clear; clc; close all;
% UX is the velocity data
N = length(UX);
fs = 46479;
T = (N-1)/fs;
%% Plot the velocity as a function of time
t = 0 : 1/fs : T;
figure(1)
plot(t,UX)
%% Histogram with 25 bins
figure(2)
hist(UX,25)
%% Log-log plot of power spectral density
% f = 1/T : 1/T : fs;
f = 0 : 1/T : fs;
PSD = abs(fft(UX)).^2;
plot(log(f),log(PSD))
%% Throw out data (Nyquist Criterion); plot line slope -5/3
figure(3)
x = log(f(1:N/2));
y = log(PSD(1:N/2));
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 25: Binomial Distribution, Homework 5.1
97
plot(x, y, x, 17-5/3*x)
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
98
M. R. Buche 2015
Lecture 25: Binomial Distribution, Homework 5.1
AME 20213: Measurements and Data Analysis
Lecture 26 — PDF’s, CDF’s
Final exam - Thursday, May 7th at 10:30am in DB129.
26.1
Probability Density Function (PDF)
p(x)dx = probability of finding x between x + x + dx.
Probability of finding x between a and b:
b
Z
p(a < x < b) =
p(x)dx
(26.1)
a
Normalization:
Z
∞
p(x)dx = 1
(26.2)
−∞
Mean:
∞
Z
x̄ =< x >=
xp(x)dx
(26.3)
(x − x̄)m p(x)dx
(26.4)
−∞
M-th moment:
Z
∞
µm =< (x − x̄) >=
−∞
26.2
Cumulative Distribution Function (CDF)
Probability that the measured x is less than y
Z
y
F (y) = P (−∞ < x < y) =
p(x)dx
(26.5)
−∞
lim F (y) = 1
y→∞
99
(26.6)
100
Lecture 26: PDF’s, CDF’s
Gaussian or Normal distribution
p(x) =
26.2.1
1
−(x − x̄)2
√ exp
2σ 2
σ 2π
(26.7)
Central Limit Theorem
For large enough N , the distribution of measured mean x̄ will become Gaussian.
One can show normalization, mean, and variance:
Z ∞
p(x)dx = 1
(26.8)
xp(x)dx = x̄
(26.9)
(x − x̄)2 p(x)dx = σ 2
(26.10)
−∞
Z
∞
−∞
Z
∞
−∞
26.2.2
CDF of the Gaussian PDF
y
1
y − x̄
√
F (y) = P (−∞ < x < y)
p(x)dx =
1 + erf
2
σ 2
−∞
Z
(26.11)
and usually there are tabulated values of z
y − x̄
(26.12)
σ
There is 68% probability between x̄ − σ and x̄ + σ, or one σ (z = ±1), and 95% within 2σ (z = ±2). The
parameter z describes how many σ away from the mean x̄.
z=
26.2.3
Example: State Highway Patrol
Measuring speed limits: v̄ = 67 mph, σv = 4 mph. Assuming a Gaussian distribution, what is the probability
that someone is going below 63 mph?
1
63 − 67
√
P (v < 63) =
1 + erf
≈ P = 15.9%
2
4 2
one also gets that z = −1, same as z = 1, and using a table: erf(z)=0.3413, and the entire area is 1, half is
0.5, so P is found by subtraction:
P = 1 − 0.5 − 0.3414 = 15.9%
What is the probability of someone going above 72 mph?
1
72 − 67
√
P (v > 72) = 1 − P (v < 72) = 1 −
1 + erf
≈ 10.56%
2
4 2
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 26: PDF’s, CDF’s
101
one also gets that z = 1.25, and using a table: erf(z)=0.3944, so P = 15.9%.
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
102
M. R. Buche 2015
Lecture 26: PDF’s, CDF’s
AME 20213: Measurements and Data Analysis
Lecture 27 — Last Lecture
27.1
Example: SAT Math Scores
If the average score was 580 with standard deviation of 60, what percentile would a score of 750 be in?
P (x < 750) = F (750) =
1
750 − 580
√
1 + erf
= 0.9977 = 99.77th percentile
2
60 2
What percent scored between 530 and 610? (use calculator and z-table)
P (530 < x < 610) = P (x < 610) − P (x < 530)
610 − 580
530 − 580
1
1
√
√
1 + erf
1 + erf
P =
−
2
2
60 2
60 2
1
0.5
−0.83
√
P =
erf √
− erf
= 0.489 = 48.9%
2
2
2
Using z-tables: A(z = 0.83) = 0.2967, A(z = 0.5) = 0.1915, At = 0.2967 + 0.1915 = 0.488 = 48.8%
27.2
Student’s t Distribution
This is what is used for small N (N < 50) where Gaussian strategies are invalid. [ν = N − 1] Student’s t
distribution is wider and not as tall as Gaussian distribution→ the t factor accounts for this.
−(ν+1)/2
Γ( ν+1
t2
2 )
P (x, ν) = √
1+
(27.1)
ν
πν Γ(ν/2)
Gamma function Γ
Γ(n) = n!
(27.2)
x − x̄
σ
(27.3)
t=
Recall repeatability uncertainty: Eq. (19.6).
103
104
Lecture 27: Last Lecture
27.2.1
Central Limit Theorem
As ν = N − 1 approaches ∞, the student’s t value distribution also becomes Gaussian.
For ν > 50, t → z, and its looks Gaussian.
27.3
Log-Normal Distribution
This describes variables that are bound by zero (cannot be negative) P (x < 0) = 0.
Example: the diameter of raindrops, someone’s income, radius of tree trunks, and people’s blood pressure
all cannot be negative.
PDF:
−(lnx − µ)2
1
√
P (x) =
exp
(27.4)
2σ 2
σx 2π
Mean:
σ2
x̄ = exp µ +
2
(27.5)
σ 2 = exp(2µ + σ)[exp(σ 2 ) − 1]
(27.6)
Variance:
CDF:
F (y) = P (lnx < lnx) =
1
lny − µ
√
1 + erf
2
σ 2
(27.7)
For something like test scores (cannot be above 100) substitute ”100 − x” for the x in ln x.
27.3.1
Example: Wooden 2 by 4’s
The modulus of elasticity of wooden 2×4’s has a log-normal distribution. What is the probability that 1×106
psi< E < 2 × 106 psi? Given: µ = 0.375, σ = 0.25.
1
1
ln2 − 0.375
ln1 − 0.375
√
√
−
P (1 < E < 2) =
1 + erf
1 + erf
2
2
0.25 2
0.25 2
At this point, Professor Paul Rumbach has broken the chalk board apparatus. It was determined that the
board could not handle the truth.
P = 0.831 = 83.1%
? This next information will involve a question will be on the exam.
27.4
Statistical Ethics
Outliers - some data points that just do not make sense.
27.4.1
Criteria For Removing Outliers
• Value is physically impossible.
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Lecture 27: Last Lecture
105
• Equipment is not properly set up.
• Grubb’s Test - statistical criteria:
s
xoutlier − x̄ N − 1
t95 2
> √
σ
N − 2 + t95 2
N
For large N (N > 50), t95 b ≈ 2, so N >> t2 ≈ 4,
r
22
N
N
√
=2 =2
N
N
N
xoutlier − x̄ >2
σ
AME 20213: Measurements and Data Analysis
(27.8)
(27.9)
(27.10)
M. R. Buche 2015
106
M. R. Buche 2015
Lecture 27: Last Lecture
AME 20213: Measurements and Data Analysis
Lecture 28 — Final Exam Review
Final exam is not cumulative! Equation sheet will be given!
Problems like 3 and 4 of Homework 5 will probably be on the test.
Study Homework 4 and 5!
28.1
Digital Data Acquisition
32-bit A/D collects data at 20,000 samples per second for 5 minutes.
(a) How many data points are collected?
N = fs · T = 20, 000(5 × 60) = 6 × 106 samples
(b) What is the data rate in byte/s?
r=
bytes
· fs = (32/8)(20, 000) = 80, 000 byte/s
sample
(c) How much memory with the data use?
D = r · t = 80, 000(5 × 60) = 24 × 106 bytes = 24 MB
(d) What is the maximum frequency that can be resolved by Fourier analysis?
Use the Nyquist Criteria:
fs
20, 000
fmax =
=
= 10, 000 Hz
2
2
28.2
1st Order Transient Response
Magnitude Ratio
Vout
1
= M (ω) = p
Vin
(ωτ )2 + 1
? Remember to convert f (Hz) to ω (rad/s)!
107
108
Lecture 28: Final Exam Review
Phase
φ(ω) = arctan(−ωτ )
28.2.1
Repeatability Uncertainty
Given that an experiment is done 8 times, the standard deviation of those 8 measurements is 8.6 m/s. What
is the repeatability uncertainty at 95% confidence?
N = 8, σ = 8.6, ν = 8 − 1 = 7: table gives t = 2.365.
UR = √
28.3
tσ
tσ
2.365(8.6)
√
=√ =
≈ 7.7 m/s
ν
N −1
7
Baseline Instrument Uncertainty
A student measures the density of a metal cube. The mass m is measured as 1.049 kg using B10P Ohaus
Balance. *Given the data sheet*, what is the instrument uncertainty for the measured value of m?
Percent uncertainties are relative (multiply by measurement).
q
p
UI = Um = UR 2 + UL 2 + UH 2 ... = 0.0052 + 0.0001 × 1.0492 + 0.0003 × 1.0492 ≈ 0.005 kg = 5 g
Given side length l = 5.13 ± 0.15 cm, what is the density and uncertainty?
ρ=
s
Uρ =
28.4
∂ρ
Um
∂m
2
m
3
= 7.77 g/cm
l3
2 s
2 2
∂ρ
Um
−3Ul m
3
3
+ Ul
=
+
= 0.68 g/cm , so ρ = 7.77 ± 0.68 g/cm
∂l
l3
l4
Fourier Analysis
Periodic functions are defined by
V (t) = V (t + T )
which means they repeat periodically.
Fourier Transform V (f ) gives large peak at fo = 1/T (fundamental frequency), and smaller and smaller ones
(higher harmonics) at n/T .
28.5
Probability and Statistics
? See Homework 5 Problems 3 and 4.
P (A ∩ B) = P (A)P (B|A)
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
Appendix A: TikZ
109
P (A ∪ B) = P (A) + P (B) − P (A ∩ B)
Given x̄, σ, and a normal distribution, what is the probability of a given measurement? (can use z-tables,
erf function on calculator, etc.)
AME 20213: Measurements and Data Analysis
M. R. Buche 2015
110
M. R. Buche 2015
Appendix A: TikZ
AME 20213: Measurements and Data Analysis
Appendix A — TikZ
For the LATEX lovers: check out the TikZ package!
Beerless
Pong
Water
Conservation
Solar
Panels
AME 21213
Experiment 4
Experiment 1
PS3
Hotshot
Solar Panel
Circuits
Baseball
Bat
Voltage
Divider
Experiment 3
Experiment 2
Piezoelectric
Pressure
Transducer
High-pass
Filter
Noninverting
Amplifier
Thermocouple
TikZ was also used to create a lot of the diagrams - all from right here in the source code!
\begin{tikzpicture}
\path[mindmap,concept color=black,text=white]
111
112
Lecture 29: TikZ
node[concept] {AME 21213}
[clockwise from=0]
child[concept color=red!80!black] {
node[concept] {Experiment 1}
[clockwise from=90]
child { node[concept] {Beerless Pong} }
child { node[concept] {Water Conservation} }
child { node[concept] {PS3 Hotshot} }
}
%[clockwise from=0]
child[concept color=blue!60!black] {
node[concept] {Experiment 2}
[clockwise from=30]
child { node[concept] {Voltage Divider} }
child { node[concept] {High-pass Filter} }
child { node[concept] {Non-inverting Amplifier} }
}
%[clockwise from=-90]
child[concept color=orange] {
node[concept] {Experiment 3}
[clockwise from=-90]
child { node[concept] {Thermo\-couple} }
child { node[concept] {Piezoelectric Pressure Transducer} }
child { node[concept] {Baseball Bat} }
}
child[concept color=green!50!black] {
node[concept] {Experiment 4}
[clockwise from=-150]
child { node[concept] {Solar Panel Circuits} }
child { node[concept] {Solar Panels} }
};
\end{tikzpicture}
M. R. Buche 2015
AME 20213: Measurements and Data Analysis
— References
A Star Maths and Physics. ”The Triple Point of Water”. PNG image. AStarMathsandPhysics.com. n.p.
Web. 20 Jan. 2015.
This site was used to provide an image for Figure 4.
Benson, Tom. ”Pitot-Static Tube”. JPEG image. Nasa.gov. Jun 12 2014. Web. 16 Jan. 2015.
This site was used to provide an image for Figure 2.
eFunda, Inc. ”Hydrostatics: Manometer Example”. GIF image. eFunda.com. n.d. Web. 16 Jan. 2015.
This site was used to provide an image for Figure 1.
113