European Journal of Operational Research 143 (2002) 268–290
www.elsevier.com/locate/dsw
Analytic centers and repelling inequalities
Richard J. Caron a, Harvey J. Greenberg b, Allen G. Holder
a
c,*
Department of Mathematics and Statistics, University of Windsor, Windsor, Ontario N9B 3P4, Canada
b
Department of Mathematics, University of Colorado at Denver, Denver, CO 80217-3364, USA
c
Department of Mathematics, Trinity University, San Antonio, TX 78212, USA
Received 28 August 2000; accepted 17 June 2001
Abstract
The new concepts of repelling inequalities, repelling paths, and prime analytic centers are introduced. A repelling
path is a generalization of the analytic central path for linear programming, and we show that this path has a unique
limit. Furthermore, this limit is the prime analytic center if the set of repelling inequalities contains only those constraints that ‘‘shape’’ the polytope. Because we allow lower dimensional polytopes, the proof techniques are nonstandard and follow from data perturbation analysis. This analysis overcomes the difficulty that analytic centers of
lower dimensional polytopes are not necessarily continuous with respect to the polytope’s data representation. A second
concept introduced here is that of the ‘‘prime analytic center’’, in which we establish its uniqueness in the absence of
redundant inequalities. Again, this is well known for full dimensional polytopes, but it is not immediate for lower
dimensional polytopes because there are many different data representations of the same polytope, each without any
redundant inequalities. These two concepts combine when we introduce ways in which repelling inequalities can
interact.
Ó 2002 Elsevier Science B.V. All rights reserved.
Keywords: Polyhedral theory; Linear programming; Computational economics; Interior point methods; Analytic center; Sensitivity
analysis; Central path; Strict complementarity
1. Introduction
In 1979, Khachiyan [18] proved that the class of linear programs has polynomial time complexity. Although some attention was devoted to understanding the behavior of this algorithm, its implementation
was disappointing. In 1984, the situation changed with Karmarkar’s algorithm [17], where the claim was
not only a theoretical complexity argument, but also an implementation that solved large linear programs
more than an order of magnitude faster than a commercial quality simplex algorithm. Karmarkar’s algorithm is called an ‘‘interior point algorithm’’ because it generates elements away from the boundary of
*
Corresponding author.
E-mail addresses: rcaron@uwindsor.ca (R.J. Caron), harvey.greenberg@carbon.cudenver.edu (H.J. Greenberg), aholder@trinity.
edu (A.G. Holder).
0377-2217/02/$ - see front matter Ó 2002 Elsevier Science B.V. All rights reserved.
PII: S 0 3 7 7 - 2 2 1 7 ( 0 2 ) 0 0 3 2 6 - 0
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
269
the polyhedron. This launched a flood of research activity into the theory and implementation of interior
point algorithms.
We now know that these algorithms are polynomial because they generate points near an infinitely
smooth curve, called the central path. This path is contained within the interior of the feasible polyhedron
and terminates at a unique, strictly complementary, optimal solution [13,22,30]. Each element of the central
path is an analytic center, a concept that Huard [15] used in his method of centers, and which was more
recently introduced to the mathematical programming community by Sonnevend [24–26].
The central path has several parameterizations, which are described in detail by Gonzaga [8]. One of
these is developed from a purely primal perspective in which the central path is generated by an objective
cut, which repels the center towards the solution. This was the method of Renegar [21], and because this is
one of the concepts from which we build, a brief description is given in the Section 2.
The pathway associated with Renegar’s algorithm is the central path, and we tend to think of it as
unique, just as we think of the analytic center of a polytope. However, the fact is that these centers depend
upon the representation of the polytope. This data reliance was understood by Sonnevend [27] when he
wrote ‘the analytic center depends not only on the polytope’s representation, but also on those data elements which perhaps do not ‘shape’ the polytope. This is the price we have to pay for the smooth dependence on the data’. While this reliance has been recognized by other authors (e.g., Ye [31], Schrijver
[23]), it has not been addressed in depth. To understand this dependence, we are concerned with a minimal
representation of a polytope as defined by Telgen [28,29]. If there are no implicit equalities, Telgen’s
minimal representation is a prime representation [5] that is, a representation that is redundancy free. In
general, there can be more than one prime representation.
There are two new concepts introduced in this paper. First, we present the concept of a repelling inequality. Our aim is to have a fundamental understanding of the paths of analytic centers generated by a set
of repelling inequalities. Second, there is a prime analytic center that is unique for a class of representations,
which we call semi-prime, that capture the geometry of the polytope. This class includes all prime representations.
The rest of this paper is organized as follows. Section 2 presents some of the basic terms and concepts.
Additional material about Renegar’s method is included to motivate the idea of repelling inequalities. We
note that the definitions of the technical terms used throughout this paper, including those taken
for granted in the linear programming literature, can be found in the mathematical programming glossary
[11].
Section 3 contains two important results. First, we show that the analytic center of lower dimensional
polytopes is continuous over a specified set of data, and we provide an example demonstrating that these
analytic centers need not be continuous outside this set. Second, we introduce the concepts of repelling
inequalities and repelling paths. Here, the main result is the establishment of a limit. When there is only
one repelling inequality, the repelling path is the central path of a linear program and the limiting
properties can be established by standard proof techniques [12,19,22,30,31]. However, when there is more
than a single repelling inequality, these proof techniques fail to apply, so we provide new proof techniques
based on data perturbations. Further, these proof techniques overcome the difficulty that analytic centers
of lower dimensional polytopes are not necessarily continuous with respect to the polytope’s data representation.
Section 4 is concerned with the transient behavior of repelling paths. Repelling paths are shown to be
continuous not only over their parameterization variable, but also over the problem data. We end the
section by showing that a repelling path is either a single point, or a simple curve.
We then turn our attention to prime representations, bringing the second major topic into focus with the
fact that the analytic center is the same for all semi-prime representations. This is immediate when the
polytope is full dimensional. However, the result for lower dimensional polytopes is more complicated
because the existence of equalities allows many semi-prime representations.
270
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
In Section 6 we introduce the relative effects of sets of repelling inequalities, categorizing them according
to whether they oppose or ally with each other. Finally, we present avenues for future research that build on
the foundations introduced here.
2. Terms and concepts
def
For any vector, v, its support set is rðvÞ¼ fj : vj 6¼ 0g. If I is any subset of indices, I denotes its complement (where context determines the original index set). In particular, rðvÞ ¼ fj : vj ¼ 0g.
A set subscript on a vector is used to indicate the subvector whose components correspond to the elements in the set. For example, vrðvÞ is the subvector of v with non-zero coordinates. When we partition
v ¼ ðvrðvÞ ; vrðvÞ Þ, it is understood that this is really a permutation of v. This notation extends to matrices. Let
U 2 Rkn , and let I be a set of row indices. Then, UI is the submatrix with only those rows indexed by I. In
the special case of a single row, we simply let the index denote the corresponding submatrix; Ui is the ith
row of U.
Sequences are indicated with set notation, and a sequence converges if, and only if, this set of elements
has a unique limit. (Please note that we use the term limit in its strict sense, not just a cluster point, which
could be one of many.) Sequences are always indexed by superscripts. For example, fxk 2 X g ! x^ is a
sequence of vectors contained in the set X that converges to x^.
A polyhedron is denoted by P, and a representation of P is P ðU ; uÞ ¼ fx : Ux 6 ug, where U 2 Rkn and
u 2 Rk . We say that P is a polytope if it is bounded, and because the analytic center for unbounded
polyhedra is not uniquely defined (see [20] for extensions), we assume that all polyhedra are polytopes.
Given the data, ðU ; uÞ, the system Ux 6 u is divided into the implied equalities Ax ¼ a, and the inequalities
Bx 6 b. So, ðAT jBT ÞT and ðaT jbT ÞT are partitions of U and u, respectively. We call ðA; a; B; bÞ the separated
data for ðU ; uÞ, and we take b to be an m-vector. For notational clarity, the dependence of ðA; a; B; bÞ on
ðU ; uÞ is not explicit, but is understood throughout. Furthermore, we assume that Ax ¼ a contains all the
implied equalities, which means that there exists x 2 P such that Bx < b. (An economical way to separate
the implied equalities from the inequalities is described by Freund et al. [7]; for details see [9,10,22]. A
probabilistic approach by Boneh is found in [4].) We denote the strict interior by P 0 ðU ; uÞ ¼
fx : Ax ¼ a; Bx < bg, and riðPÞ denotes the relative interior of P. If P ðU ; uÞ is bounded, rankðU Þ ¼ n or
equivalently NðU Þ ¼ f0g, where N denotes the null space.
A constraint is redundant if its removal provides another representation of the same polytope. When
there are no redundancies, the representation is prime [5]. We say that a representation is semi-prime if there
are no redundant inequalities. Hence, every prime representation is semi-prime regardless of whether or not
there are redundant equations.
Given a representation, P ðU ; uÞ, its analytic center is the unique solution to the following problem
(sometimes called logarithmic barrier):
)
(
m
X
lnðbi Bi xÞ : Ax ¼ a; Bx < b :
fx ðU ; uÞg ¼ argmax
i¼1
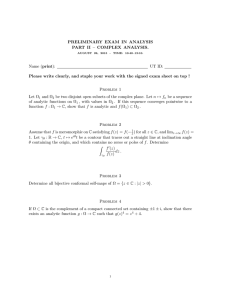
Fig. 1 illustrates the effect that redundancies have on the analytic center. In the case shown, the analytic
center moves upward and away from the two redundant inequalities. This is due to the presence of the
associated logarithmic terms in the objective function.
As suggested in the introduction, some subsequent results are motivated by Renegar’s method. We
associate the non-linear program
)
(
m
X
max
lnðbi Bi xÞ þ l^ lnðK cxÞ : Ax ¼ a; Bx < b; cx < K
i¼1
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
271
Fig. 1. Effect of redundant inequalities on analytic center.
with the linear program
min fcx : Ax ¼ a; Bx 6 bg:
The value of K in the non-linear program is chosen so that the constraint cx 6 K is a redundant inequality.
Because the objective function in the non-linear program is strictly concave for any l^ P 0, this mathematical program has a unique solution, denoted xð^
lÞ. The analytic center of the feasible region of the linear
lÞ
program is xð0Þ. Furthermore, the central path for the linear program is fxð^
lÞ : l^ P 0g, and liml^!1 xð^
exists and is called the analytic center solution. Notice that as l^ increases, say from 1 to 2, that this corresponds to adding the the inequality, cx 6 K, twice instead of once. This extra redundant constraint repels
the center farther away from level set fx : cx ¼ Kg.
For different values of l^, the optimal solution, xð^
lÞ, is a weighted analytic center. In general, for the
positive vector x 2 Rmþ1 , called a weighting vector, the weighted analytic center is the unique solution to
)
(
m
X
max
xi lnðbi Bi xÞ þ xmþ1 lnðK cxÞ : Ax ¼ a; Bx < b; cx < K :
i¼1
So, xð^
lÞ is a special case with xi ¼ 1, i ¼ 1; 2; . . . ; m, and xmþ1 ¼ l^. We would like to point out that a
positive weighting vector could be incorporated throughout the paper, but we do not include such a vector
because it offers no new insights.
For notational convenience, the vector of Lagrange multipliers is assumed to be a row vector, so
transpose notation is not required. The matrix Aþ denotes the Moore–Penrose generalized inverse of the
matrix A (see [6]), and capital letters indicate the diagonal matrix of the corresponding vector (e.g.,
S ¼ diagfs1 ; s2 ; . . . ; sn g). Additional notation is introduced as needed.
3. Repelling inequalities and limiting properties of repelling paths
Let I be a non-empty index set of inequalities, and consider
)
(
m
X
X
lnðbi Bi xÞ þ
lnðbi Bi xÞ : Ax ¼ a; Bx < b :
f xðl; U ; u; IÞg ¼ argmax l
i2I
i¼1
The inequalities indicatedP
by I are called repelling because as l increases, there is incentive from the objective function to make i2I lnðbi Bi xÞ as large as possible. The repelling path, fxðl; U ; u; IÞ : l P 0g,
begins at the analytic center of P ðU ; uÞ, which is xð0; U ; u; IÞ ¼ x ðU ; uÞ, and traces a curve as l ! 1.
272
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
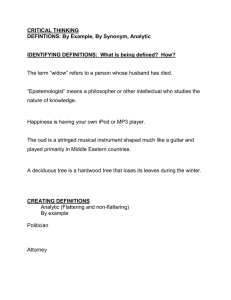
Fig. 2. Example trajectories of repelling inequalities.
To help fix ideas, consider the unit square in R2 , given by the prime representation:
ð4Þ x2 6 1:
As shown in Fig. 2, the analytic center is x ðU ; uÞ ¼ 12; 12 . The repelling paths, with various choices of I,
begin there and are shown with dashed arrows. We explain some of these.
For I ¼ f1g, the repelling path is being repelled from the boundary where x1 ¼ 0. We have
ð1Þ
x1 6 0;
ð2Þ
x2 6 0;
ð3Þ x1 6 1;
f xðl; U ; u; IÞg ¼ argmaxfð1 þ lÞ ln x1 þ ln x2 þ lnð1 x1 Þ þ lnð1
1þl 1
1
;
¼
! 1;
; as l ! 1:
2þl 2
2
x2 Þ : 0 < x1 ; x2 < 1g
Similarly, when I ¼ f4g, the path is repelled from the boundary where x2 ¼ 1, and we have
f xðl; U ; u; IÞg ¼ argmaxfð1 þ lÞ lnð1 x2 Þ þ ln x1 þ ln x2 þ lnð1
1 1
1
;
; 0 ; as l ! 1:
¼
!
2 2þl
2
x1 Þ : 0 < x1 ; x2 < 1g
Now, suppose jIj ¼ 2. If the repelling constraints correspond to bounds on different variables, the re2
pelling path converges to one of the corners of the square: xðl; U ; u; IÞ ! ð^
x1 ; x^2 Þ 2 f0; 1g , as l ! 1. For
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
273
example, I ¼ f1; 2g corresponds to x1 ; x2 P 0, and the limit is ð1; 1Þ. On the other hand, if the repelling
inequalities are the bounds on the same variable, such as I ¼ f1; 3g, the entire repelling path is the analytic
center:
f xðl; U ; u; IÞg ¼ argmaxfð1 þ lÞðln x1 þ lnð1
1 1
;
¼
; for all l P 0:
2 2
x1 ÞÞ þ ln x2 þ lnð1
x2 Þ : 0 < x1 ; x2 < 1g
Similarly, xðl; U ; u; IÞ is invariant with respect to l if I ¼ f1; 2; 3; 4g. It is also possible that the repelling
paths for different sets of repelling inequalities are equal, which is the case for I ¼ f2g and I 0 ¼ f1; 2; 3g.
Notice in the example, that no repelling inequality holds with equality in the limit. Lemma 3.1 shows that
this is true in general. In words, the slack values associated with repelling inequalities are uniformly
bounded away from zero.
Lemma 3.1. There exists e > 0, such that whenever fxðlk ; U ; u; IÞg ! x^ for lk ! 1, ^sI ¼ bI
BI x^ P e.
Proof. Let x0 2 P 0 ðU ; uÞ and s0 ¼ b Bx0 > 0. Suppose flk g ! 1, and let sk ¼ b Bxðlk ; U ; u; IÞ. Since P
is bounded, the sequence fðxðlk ; U ; u; IÞ; sk Þg has a cluster point, ð^
x; ^sÞ. The optimality of xðlk ; U ; u; IÞ
implies
m
m
X
X
X
X
lnðs0i Þ þ
lnðs0i Þ 6 lk
lnðski Þ þ
lnðski Þ:
lk
i2I
i¼1
i2I
i¼1
k
Dividing by l gives
m
m
X
X
1 X
1 X
lnðs0i Þ þ k
lnðs0i Þ 6
lnðski Þ þ k
lnðski Þ:
l i¼1
l i¼1
i2I
i2I
P
Since the left side converges to i2I lnðs0i Þ, the right side is bounded below. Suppose for the sake of attaining a contradiction that fski 2 Rþ þ g ! 0 for some i 2 I. Then, the fact that P is bounded implies
X
lnðski Þ ! 1;
i2I
which in turn implies
m
1 X
lnðski Þ ! 1:
lk i¼1
This contradicts the boundedness of P, and hence, there does not exist i 2 I such that fski 2 Rþ þ g ! 0.
Subsequently, ^sI is bounded away from 0. In the special situation where I ¼ fig, the slack value, si , is not only bounded away from zero, but is also
maximized as l ! 1. This is the foundation of Renegar’s method. With jIj > 1, there is no such guarantee
of componentwise maximization (see the previous example when I ¼ f1; 3g).
This section’s forthcoming main result says that there is a unique cluster point––i.e., that every repelling
path has a limit as l ! 1. Neither the classical approach of McLinden [19], the recent results by G€
uler and
Ye [12], nor the target following analysis of Jansen et al. [16] and Roos et al. [22] extend to our problem
formulation. This is because some of the non-repelling inequalities can have positive slack in the limit, as
was seen in the previous example with I ¼ f1; 3g.
Our development begins with the following lemma, which simply shows that a collection of polytopes is
bounded, provided the representations converge.
274
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Lemma 3.2. Let fðU k ; uk Þg ! ðU ; uÞ and P ðU ; uÞ be bounded and non-empty. Then, there exist a natural
number K such that,
[
Q¼
P ðU k ; uk Þ
kPK
is bounded.
Proof. We first show that there exists K such that k P K implies P ðU k ; uk Þ is bounded. Suppose not. Then,
j
j
there exists a subsequence fk j g such that P ðU k ; uk Þ is unbounded for each j. Subsequently, there exists xj
j
such that kxj k ¼ 1 and U k xj 6 0. Since fxj g is a bounded sequence, we assume for clarity of notation that
j
fxj g ! x. We now have that fU k xj g ! Ux 6 0, which is a contradiction to the assumption that P ðU ; uÞ is
bounded. Hence, there exists K such that k P K implies P ðU k ; uk Þ is bounded.
Let Q be defined with the K in the preceding paragraph and suppose Q is unbounded. Then there exists
1
1
1
1
1
fxj 2 Qg such that kxj k ! 1. Set J 1 ¼ 1, and let xJ 2 P ðU k ; uk Þ. Since P ðU k ; uk Þ is bounded, there exists
1
1
2
2
2
2
2
J 2 > J 1 such that j P J 2 implies xj 62 P ðU k ; uk Þ. Let xJ 2 P ðU k ; uk Þ. Again, since P ðU k ; uk Þ is bounded,
2
2
there exists J 3 > J 2 such that j P J 3 implies xj 62 P ðU k ; uk Þ. Continuing, we form the subsequence
i
i
i
fxJ 2 P ðU k ; uk Þg, which has the following two properties:
i
i
kxJ k ! 1;
i
and
Uk
i
i
xJ
uJ
6
:
i
kxJ k kxJ i k
i
However, xJ =kxJ k is bounded, and any cluster point, x, has the property that Ux 6 0, which contradicts
the assumption that P ðU ; uÞ is bounded. Hence, our supposition that Q is unbounded is false. The next objective is to show that the analytic center is a continuous function over a particular set of
data. Unlike the analytic center of a full dimensional polytope, which is analytic in its data, the analytic
center of a lower dimensional polytope can have discontinuities with respect to data changes. The following
example demonstrates the problem. Consider
82
82
19
3 0
19
3 0
1
1
1
1
1 þ 1k
1
>
>
>
>
>
>
>
>
>
>
>
>6 1
>
>6
7 B 1 C>
7 B 1 C>
1
1
1
=
<
=
<
C
7
B
6
C
7
B
6
C ¼ fðU ; uÞg;
7; B
7; B 0 C ! 6
ðU k ; uk Þ ¼ 6
1
0
C>
7 B
6
C>
7 B
6
>
>
>
>
4 1
A>
5 @
4
0 5 @ 0 A>
>
>
>
>
>
>
>
>
;
:
;
:
0
0
1
0
0
1
where the partition indicates the separated data ðAk ; ak ; Bk ; bk Þ and ðA; a; B; bÞ. It is easy
to
check that
x ðU k ; uk Þ ¼ ð0; 1Þ, for all k (in fact this is the only element in P ðU k ; uk Þ), but x ðU ; uÞ ¼ 12; 12 .
Before proceeding, we present some notation that is particularly useful. Let fðU k ; uk Þg ! ðU ; uÞ. Furthermore, let ðA; a; B; bÞ and ðAk ; ak ; Bk ; bk Þ be the separated data for ðU ; uÞ and ðU k ; uk Þ, respectively. Define
ðdAk ; dak ; dBk ; dbk Þ such that
!
"
A þ dAk
a þ dak
k
Uk ¼
¼
and
u
:
ð1Þ
B þ dBk
b þ dbk
This notation represents ðU k ; uk Þ with the partition of the separated data for ðU ; uÞ. Because this notation
does not provide information about the separated data for ðU k ; uk Þ, it is not necessarily the case that
ðAk ; ak ; Bk ; bk Þ is same as ðA þ dAk ; a þ dak ; B þ dBk ; b þ dbk Þ. To illustrate, in the previous example we have
2
3
!
"
!
"
1 þ 1k
1
1
1
1
1þk
1
A¼
; A þ dAk ¼
; and Ak ¼ 4 1
1 5:
1
1
1
1
1
0
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
275
The next lemma is found in [6] and provides us with a collection of data perturbations that ensure the
continuity of the analytic center. The lemma essentially states that a sequence of Moore–Penrose generalized inverses converges to the Moore–Penrose inverse of the limiting matrix if, and only if, rank is preserved.
Lemma 3.3. If fðU k ; uk Þg ! ðU ; uÞ, ðA þ dAk Þþ ! Aþ if, and only if, rankðA þ dAk Þ ¼ rankðAÞ for all
sufficiently large k.
In light of Lemma 3.3, we say that fðU k ; uk Þg ! ðU ; uÞ is equality rank preserving if
rankðA þ dAk Þ ¼ rankðAÞ, for all sufficiently large k. The sequence in the last example was not equality rank
preserving because
!
"
!
"
1
1
1 þ 1k
1
k
2 ¼ rankðA þ dA Þ ¼ rank
6¼ rank
¼ rankðAÞ ¼ 1:
1
1
1
1
To characterize the equality rank preserving sequences, we define the following collection:
EðU ; uÞ ¼
ðU k ; uk Þ ! ðU ; uÞ : ðU k ; uk Þ is equality rank preserving :
The following lemma shows that equality rank preserving sequences retain the inequalities of the unperturbed system.
Lemma 3.4. Let fðU k ; uk Þg 2 EðU ; uÞ. Then, there exists fxk 2 P ðU k ; uk Þg ! x 2 P ðU ; uÞ such that ðB þ
dBk Þxk < b þ dbk and Bx < b.
Proof. Let f~xk 2 P ðU k ; uk Þg ! ~x 2 P ðU ; uÞ. Then,
ak ðA þ dAk Þ~xk 6 a þ dak ;
ðB þ dBk Þ~xk 6 b þ dbk :
Since fðA þ dAk Þ~xk g ! A~x ¼ a, fak g ! a. Let x0 2 P 0 ðU ; uÞ. Then, x0 ¼ Aþ a þ q0 for some q0 2 NðAÞ. Set
þ
xk ¼ ðA þ dAk Þ ak þ q0
þ
ðA þ dAk Þ ðA þ dAk Þq0 :
Then,
þ
ðA þ dAk Þxk ¼ ðA þ dAk ÞðA þ dAk Þ ak þ ðA þ dAk Þq0
¼ ak þ ðA þ dAk Þq0
ðA þ dAk Þq0 ¼ ak 6 a þ dak :
So, all that is left is to show that ðb þ dbk Þ
ðb þ dbk Þ
þ
ðA þ dAk ÞðA þ dAk Þ ðA þ dAk Þq0
ðB þ dBk Þxk > 0, for large k. First,
þ
ðB þ dBk ÞðA þ dAk Þ ak þ ðB þ dBk Þq0
þ
ðB þ dBk ÞðA þ dAk Þ ðA þ dAk Þq0
þ
¼ b ðB þ dBk Þ ðA þ dAk Þ ak þ q0 þ dbk
ðB þ dBk Þxk ¼ ðb þ dbk Þ
þ ðB þ dBk ÞðA þ dAk Þþ ðA þ dAk Þq0 :
Since fðU k ; uk Þg 2 EðU ; uÞ,
þ
b ðB þ dBk Þ ðA þ dAk Þ ak þ q0 þ dbk ! b
and because q0 2 NðAÞ,
ðB þ dBk ÞðA þ dAk Þþ ðA þ dAk Þq0 ! 0:
BðAþ a þ q0 Þ ¼ b
Bx0 > 0;
276
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Hence, ðb þ dbk Þ
ðB þ dBk Þxk > 0 for sufficiently large k, and the proof is complete.
The next theorem proves that the analytic center is a continuous function over EðU ; uÞ. Similar continuity results are found in [13,20,24], but unlike our result, those results do not allow either matrix perturbations or the dimension of the polytope to change.
Theorem 3.1. The analytic center, x ðU ; uÞ, is continuous over EðU ; uÞ.
Proof. Let ðU k ; uk Þ 2 EðU ; uÞ, and let ðA; a; B; bÞ be the separated data for ðU ; uÞ. Furthermore, let
ðdAk ; dak ; dBk ; dbk Þ be as in (1). From Lemma 3.4, there exists f~xk 2 P ðU k ; uk Þg ! ~x 2 PðU ; uÞ such that
~sk ¼ b þ dbk ðB þ dBk Þ~xk > 0 and ~s ¼ b B~x > 0, for sufficiently large k. This means that for large k, the
separated data for P ðU k ; uk Þ is
ðA þ dAk ÞJk x ¼ ða þ dak ÞJk ;
ðA þ dAk ÞJ k x 6 ða þ dak ÞJ k ;
ðB þ dBk Þx 6 ðb þ dbk Þ;
where ðJ k jJk Þ partitions the implied equalities, Ax ¼ a, of P ðU ; uÞ, and the inequalities indicated by J k are
not implied equalities in the perturbed system P ðU k ; uk Þ.
From Lemma 3.2, we have that the sequence of analytic centers, fx ðU k ; uk Þg is bounded. Let x^ be a
cluster point of fx ðU k ; uk Þg. Define xk ¼ x ðU k ; uk Þ and the associated slack variables:
skJ k ¼ ða þ dak ÞJ k
k
k
s ¼ ðb þ db Þ
ðA þ dAk ÞJ k xk ! aJ k
k
k
ðB þ dB Þx ! b
AJ k x^ ¼ 0;
B^
x ¼ ^s:
For sufficiently large k, ðxk ; sk Þ is the analytic center of the polytope described by
ðA þ dAk ÞJk x ¼ ða þ dak ÞJk ;
ðA þ dAk ÞJ k x ¼ ða þ dak ÞJ k
skJ k ;
ðB þ dBk Þx þ s ¼ ðb þ dbk Þ;
s P 0:
The Lagrange conditions describing ðxk ; sk Þ are the existence of row vectors ak , bk and ck such that
k
ðA þ dAk ÞJk xk ¼ ða þ dak ÞJk ;
k
ðA þ dAk ÞJ k xk ¼ ða þ dak ÞJ k
skJ k ;
ðB þ dBk Þxk þ sk ¼ ðb þ dbk Þ;
ak ðA þ dAk ÞJk þ bk ðA þ dAk ÞJ k þ ck ðB þ dBk Þ ¼ 0;
ck S k ¼ e T ;
sk > 0:
Since
m
X
i¼1
lnð~ski Þ 6
m
X
i¼1
lnðski Þ )
m
X
i¼1
lnð~si Þ 6
m
X
lnð^si Þ;
i¼1
1
an argument analogous to that of the proof of Lemma 3.1 shows that ^s > 0. Hence, fck ¼ eT ðS k Þ g
converges, say to c^. Set
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
# k k$
a ;b ¼
277
ck ðB þ dBk ÞðA þ dAk Þþ :
Since fðU k ; uk Þg 2 EðU ; uÞ, Lemma 3.3 implies f½ak ; bk g !
c^BAþ ½^
a; b^: Hence, ð^
a; b^; c^Þ satisfy the
optimality conditions for x^ to be the analytic center of P ðU ; uÞ. Since this analytic center is unique, we have
the desired result:
lim x ðU k ; uk Þ ¼ x ðU ; uÞ:
k!1
The following corollary is immediate.
Corollary 3.1.1. x ðU ; uÞ is a continuous function of u, keeping U fixed.
Our efforts are now directed towards describing a region of the original polytope that we later show
contains the limit of the repelling path. This region is defined as an optimal set and is in general not
contained in the boundary of the polytope. Specifically, define
(
)
X
P I ðU ; uÞ ¼ argmax
lnðbi Bi xÞ : x 2 P ðU ; uÞ; BI x < bI :
i2I
To illustrate, consider the example in Fig. 2, where
P f1;2g ðU ; uÞ ¼ argmaxfln x1 þ ln x2 : 0 < x1 ; x2 6 1g ¼ fð1; 1Þg;
P f1;3g ðU ; uÞ ¼ argmaxfln x1 þ lnð1
x1 Þ : 0 < x1 < 1; 0 6 x2 6 1g ¼ f 12; f : 0 6 f 6 1g:
The former optimal set is on the boundary of P ðU ; uÞ, but the latter is not. The following lemma establishes
that the slacks associated with the repelling constraints are invariant over P I ðU ; uÞ.
Lemma 3.5. bI BI x is constant in P I ðU ; uÞ, say sI ðU ; uÞ. Conversely, if x 2 P ðU ; uÞ and bI
then x 2 P I ðU ; uÞ.
BI x ¼ sI ðU ; uÞ,
Proof. Rewrite the defining problem using slacks as variables:
(
)
X
max
lnðsi Þ : Ax ¼ a; Bx þ s ¼ b; sI > 0; sI P 0 :
i2I
Since the objective function is strictly concave in sI , its optimal value, sI ðU ; uÞ, is unique. It follows that
sI ¼ bI BI x ¼ sI ðU ; uÞ for all x 2 P I ðU ; uÞ. The converse follows from the definition of optimality. A consequence of Lemma 3.5 is that
P I ðU ; uÞ ¼ x 2 P ðU ; uÞ : sI ðU ; uÞ ¼ bI
BI x :
The next lemma completes the work required to show that fxðl; U ; u; IÞg has a unique limit as l ! 1.
The strategy of proof is divided into two parts, with the first part showing that the cluster points of
f xðlk ; U ; u; IÞ : lk ! 1g are contained in P I ðU ; uÞ. The second part proves the existence of a unique limit
by showing that the only cluster point is the analytic center of P I ðU ; uÞ.
Lemma 3.6. If fxðlk ; U ; u; IÞg ! x^, for lk ! 1, then x^ 2 P I ðU ; uÞ. Further, partition I into J and J, where J
indicates the implied equalities in I upon fixing BI x ¼ bI sI ðU ; uÞ. Then,
278
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
(
f^
xg ¼ argmax
X
)
lnðbi
I
Bi xÞ : x 2 P ðU ; uÞ; BJ x < bJ :
i2J
x ¼ ^s, and sI ¼ sI ðU ; uÞ. We first prove x^ 2 P I ðU ; uÞ.
Proof. Let xk ¼ xðlk ; U ; u; IÞ ! x^, sk ¼ b Bxk ! b B^
0
0
0
0
Let x 2 P ðU ; uÞ and s ¼ b Bx > 0. The optimality of xk implies for any b 2 ð0; 1Þ,
m
m
X
X
X
X
lnðski Þ þ
lnðski Þ P lk
lnðsi þ bðs0i si ÞÞ þ
lnðsi þ bðs0i si ÞÞ:
lk
i2I
i2I
i¼1
Equivalently,
X
X
lnðski Þ P
lnðsi þ bðs0i
i2I
i2I
¼
X
lnðsi þ bðs0i
i2I
As k ! 1,
m
1 X
i¼1
m
1 X
lnðsi þ bðs0i
lk i¼1
m
1 X
si ÞÞ þ k
lnðsi þ bðs0i
l i¼1
si ÞÞ þ
si ÞÞ
si ÞÞ
m
1 X
lnðski Þ
lk i¼1
1 X
lnðski Þ
lk i2rð^sÞ
1 X
lnðski Þ:
lk i2rð^sÞ
1 X
lnðski Þ ! 0:
k
l
i¼1
i2rð^
sÞ
P
Furthermore, as k ! 1, fsrð^sÞ g ! 0, which implies l1k i2rð^sÞ lnðski Þ < 0 for sufficiently large k. Hence,
X
X
ln ^si P
lnðsi þ bðs0i si ÞÞ;
lk
i2I
lnðsi þ bðs0i
si ÞÞ ! 0
and
i2I
for any b 2 ð0; 1Þ. However, upon allowing b ! 0 (recall sI > 0) we have
X
X
ln ^si P
ln si ;
i2I
i2I
and the optimality of sI implies x^ 2 P I ðU ; uÞ.
Let sðlÞ ¼ b Bxðl; U ; u; IÞ. So far we have
lim sI ðlÞ ¼ sI
l!1
and
lim sJ ðlÞ ¼ 0:
l!1
Since ð xðl; U ; u; IÞ; sJ ðlÞÞ is the analytic center of the polytope described by
Ax ¼ a;
BI x ¼ b I
sI ðlÞ;
BJ x ¼ bJ
sJ ðlÞ;
BJ x þ s J ¼ b J ;
sJ P 0:
Corollary 3.1.1. not only implies the existence of
lim ð xðl; U ; u; IÞ; sJ ðlÞÞ;
l!1
but also shows that this limit is the analytic center of
x : x 2 P I ðU ; uÞ; BJ x < bJ :
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
279
Lemma 3.6 has an interesting interpretation. First, the limit maximizes the logarithmic barrier function
over the repelling inequalities, defining P I . Second, the limit is the analytic center of P I – i.e., it maximizes
the logarithmic barrier function over the non-repelling inequalities to decide the specific limit. For example,
consider I ¼ f4g in Fig. 2 – i.e., the repelling inequality is x2 6 1. The limit first maximizes lnðs4 Þ, but the
entire line segment, f½0; f : f 2 ½0; 1g, does this with s4 ¼ 1. The second criterion is to find the analytic
center of the set of
feasible elements satisfying s4 ¼ s4 . This second criterion decides that the limit is the
unique point 0; 12 .
We conclude with the main result of this section, which shows that a repelling path has unique limit as l
goes to zero or infinity. Furthermore, the limit as l goes to zero is the analytic center of P ðU ; uÞ, and the
limit as l goes to infinity is the analytic center of P I ðU ; uÞ.
Theorem 3.2. Let P ðU ; uÞ be a representation of a polytope, and x^ðU ; u; IÞ be the analytic center of P I ðU ; uÞ.
Then,
lim xðl; U ; u; IÞ ¼ x^ðU ; u; IÞ
l!1
and
lim xðl; U ; u; IÞ ¼ x ðU ; uÞ:
l!0þ
Proof. The first equality follows directly from Lemma 3.6. Let flk 2 Rþ þ g ! 0 and set sðlk Þ ¼
b Bxðlk ; U ; u; IÞ. Furthermore, let ðx; sÞ be a cluster point of fxðlk ; U ; u; IÞ; sðlk Þg. The necessary and
sufficient Lagrange conditions for ðxðlk ; U ; u; IÞ; sðlk ÞÞ are the existence of row vectors aðlk Þ and bðlk Þ such
that
Axðlk ; U ; u; IÞ ¼ a;
Bxðlk ; U ; u; IÞ < b;
aðlk ÞA þ bðlk ÞB ¼ 0;
bI ðlk ÞSI ðlk Þ ¼ ðlk þ 1ÞeT ;
bI ðlk ÞSI ðlk Þ ¼ eT :
Pm
Pm
P
P
Because lk i2I lnð~sI Þ þ i¼1 lnð~si Þ 6 lk i2I lnðsi ðlk ÞÞ þ i¼1 lnðsi ðlk ÞÞ for any ~s 2 P 0 ðU ; uÞ, we have that
s > 0 by the same argument found in the proof of Lemma 3.1. So, fbðlk Þg and f bðlÞBAþ g converge, say
to b and a, respectively. We now have
Ax ¼ a;
Bx < b;
aA þ bB ¼ 0;
bI SI ¼ eT ;
bI SI ¼ eT ;
which are the necessary and sufficient Lagrange conditions describing x ðU ; uÞ. Hence, any cluster point of
fxðlk ; U ; u; IÞg is x ðU ; uÞ, and the second equality holds. Henceforth, we denote the analytic center of P I ðU ; uÞ by x^ðU ; u; IÞ, and we define ^sðU ; u; IÞ ¼
b B^
xðU ; u; IÞ. When there is no confusion, we simplify this notation to x^ and ^s, respectively.
4. Transient behavior of repelling paths
We first show that xðl; U ; u; IÞ is continuous over Rþ þ EðU ; uÞ fIg, which has the immediate corollary that xðl; U ; u; IÞ is a continuous function of l, keeping ðU ; u; IÞ fixed.
280
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Theorem 4.1. For any I, xðl; U ; u; IÞ is continuous over Rþ þ EðU ; uÞ fIg.
Proof. Let fðlk ; U k ; uk Þ 2 Rþ þ EðU ; uÞg ! ðl; U ; uÞ, where l > 0. Let ðdAk ; dak ; dBk ; dbk Þ be as in (1) and
let ðJ k jJk Þ partition of the implied equalities Ax ¼ a as in Theorem 3.1. We have by definition that
xðlk ; U k ; uk ; IÞ maximizes
m
X
X
X
lnðsi Þ þ
lnðsi Þ þ
lnðsi Þ
lk
I
i2J k
i¼1
subject to
ðA þ dAk ÞJk xk ¼ ða þ dak ÞJk ;
ðA þ dAk ÞJ k x þ sJ k ¼ ða þ dak ÞJ k ;
ðB þ dBk Þxk þ sk ¼ ðb þ dbk Þ;
s > 0;
sJ k > 0:
Let
xk ¼ xðlk ; U k ; uk ; IÞ;
skJ k ¼ sJ k ðlk ; U k ; uk ; IÞ ¼ ða þ dak ÞJ k
sk ¼ sðlk ; U k ; uk ; IÞ ¼ ðb þ dbk Þ
ðA þ dAk ÞJ k xðlk ; U k ; uk ; IÞ; and
ðB þ dBk Þxðlk ; U k ; uk ; IÞ:
Then, for sufficiently large k, ðxk ; sk Þ is the analytic center of the polytope described by
ðA þ dAk ÞJk x ¼ ða þ dak ÞJk ;
k
ðA þ dAk ÞJ k x ¼ ða þ dak ÞJ k
k
sJ k ;
k
ðB þ dB Þx þ s ¼ ðb þ db Þ;
s P 0:
Hence, the Lagrange conditions for ðxk ; sk Þ are
ðA þ dAk ÞJk xk ¼ ða þ dak ÞJk ;
k
ðA þ dAk ÞJ k xk ¼ ða þ dak ÞJ k
k
k
k
sJ k ;
k
ðB þ dB Þx þ s ¼ ðb þ db Þ;
ak ðA þ dAk ÞJk þ bk ðA þ dAk ÞJ k þ ck ðB þ dBk Þ ¼ 0;
ck S k ¼ ðl þ 1ÞeT ;
sk > 0:
So, an argument like that found in the proof of Theorem 3.1 shows that fsðlk ; U k ; uk ; IÞg ! sðl; U ; u; IÞ. Corollary 4.1.1. The repelling path, fxðl; U ; u; IÞ : l P 0g is a continuous function with respect to l.
Proof. When l > 0, the result follows directly from Theorem 4.1. The case when l ¼ 0 is a direct consequence of Theorems 3.1 and 3.2. R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
281
The similarity of the proofs for Theorems 3.1 and 4.1 is a strength of the technique of proof. The standard
method of proof used to show that the central path is analytic with respect to ðl; b; cÞ, where b and c are the
right-hand side and cost coefficient vectors of a standard form linear program, uses the implicit function
theorem [13]. However, the use of the implicit function theorem does not always provide an equivalent
analytic property for the analytic center solution, which is generally discontinuous with respect to data
perturbations (see [14] for details). While the sensitivity analysis type proofs presented for Theorems 3.1
and 4.1 establish only continuity, the same method of proof works for both the repelling path and its limits.
The differential properties of a repelling path and its limits are currently unexplored.
The second result of this section shows that a repelling path either degenerates to a single point or is a
simple curve – i.e. the repelling path does not cross itself.
Theorem 4.2. Either xðl1 ; U ; u; IÞ ¼ xðl2 ; U ; u; IÞ for all l1 and l2 , or xðl1 ; U ; u; IÞ 6¼ xðl2 ; U ; u; IÞ for any
l1 6¼ l2 .
Proof. Suppose that l1 6¼ l2 and xðl1 ; U ; u; IÞ ¼ xðl2 ; U ; u; IÞ. Setting s1 ¼ b
Bxðl2 ; U ; u; IÞ, the Lagrange conditions are
Axðl1 ; U ; u; IÞ ¼ a;
Axðl2 ; U ; u; IÞ ¼ a;
Bxðl1 ; U ; u; IÞ < b;
Bxðl2 ; U ; u; IÞ < b;
a1 A þ b1 B ¼ 0;
a2 A þ b2 B ¼ 0;
b1I SI1 ¼ ðl1 þ 1ÞeT ;
b2I SI2 ¼ ðl2 þ 1ÞeT ;
b1I SI1 ¼ eT ;
b2I SI2 ¼ eT :
Bxðl1 ; U ; u; IÞ and s2 ¼ b
Let l > 0 and h be such that l ¼ ð1 hÞl1 þ hl2 . Since xðl1 ; U ; u; IÞ ¼ xðl2 ; U ; u; IÞ implies s1 ¼ s2 , the
corresponding linear combinations of the Lagrange multipliers, ð1 hÞa1 þ ha2 and ð1 hÞb1 þ hb2 , satisfy
the Lagrange conditions for l with the common primal values. 5. The prime analytic center
Recall that a representation is prime if it does not contain any redundancy and is semi-prime if there are
no redundant inequalities. When the dimension of P is full, prime and semi-prime are equivalent, and
representations differ only by scale and the ordering of the inequalities (see Schrijver [23]). Row scaling does
not affect the analytic center because
)
(
X
max
lnðri ðbi Bi xÞÞ : Ax ¼ a; ri Bi x < ri bi for i ¼ 1; . . . m
i
¼
X
i
(
ln ri þ max
X
)
lnðbi
Bi xÞ : Ax ¼ a; Bi x < bi
for i ¼ 1; . . . m ;
i
where ri > 0 is the scale of the ith inequality. This leads directly to the following:
Theorem 5.1. The analytic center of a full dimensional polytope is the same for each prime representation.
The situation is more complicated when dimðPÞ < n. To illustrate, consider four prime representations
of the diagonal of a unit square:
282
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
P1 ¼ fx 2 R2 : x1
x2 ¼ 0;
x1 6 0; x1 6 1g;
2
x2 ¼ 0;
x1 6 0; x2 6 1g;
2
x2 ¼ 0;
x2 6 0; x2 6 1g;
2
x2 ¼ 0;
x2 6 0; x1 6 1g:
P2 ¼ fx 2 R : x1
P3 ¼ fx 2 R : x1
P4 ¼ fx 2 R : x1
Putting these into matrix terms, we have ½Ak jak ¼ ½1
!
"
1 0 0
½B1 jb1 ¼
;
1 0 1
½B2 jb2 ¼
!
1
0
!
0
½B jb ¼
0
3
3
½B4 jb4 ¼
!
0
1
1 j 0 for k ¼ 1; 2; 3; 4, but the inequalities differ:
"
0 0
;
1 1
"
1 0
;
1 1
"
1 0
:
0 1
In general, with one set of variables dependent on another (viz., x1 ¼ x2 ), we can have different inequalities
represent the same set. Despite this, we shall prove that the analytic center of a polytope is the same for all
semi-prime representations – i.e., Theorem 5.1 does extend to polytopes of lower dimension. The following
result is used to prove the extension of Theorem 5.1 and appears to be new.
Lemma 5.1. Suppose P ðU ; uÞ and P ðU 0 ; u0 Þ are two representations of P with corresponding separated data
ðA; a; B; bÞ and ðA0 ; a0 ; B0 ; b0 Þ. Then,
1. NðAÞ ¼ NðA0 Þ.
2. Aþ A ¼ A0þ A0 .
3. Aþ a ¼ A0þ a0 .
Proof. Define A ¼ fx : Ax ¼ ag and A0 ¼ fx : A0 x ¼ a0 g. We begin by showing A ¼ A0 . Let x0 2 P 0 ðU ; uÞ
and consider x 2 A. Then, there exists a 2 ð0; 1Þ such that Av ¼ a and Bv < b for v ¼ x0 þ aðx x0 Þ. This
implies v 2 P, and A0 v ¼ a0 . Since A0 x0 ¼ a0 , it follows that A0 x ¼ a0 , which shows x 2 A0 . Hence, A A0 .
Similarly, A0 A, so A ¼ A0 . We now have the first proposition:
NðAÞ ¼ A
fx0 g ¼ A0
fx0 g ¼ NðA0 Þ:
The orthogonal projection operators onto NðAÞ and NðA0 Þ are I Aþ A and I A0þ A0 , respectively. Since
NðAÞ ¼ NðA0 Þ and the projection operator onto this space is unique, we have Aþ A ¼ A0þ A0 . From this we
obtain the third simply by substitution: Aþ a ¼ Aþ Ax0 ¼ A0þ A0 x0 ¼ A0þ a0 . To extend Theorem 5.1, we also need the following result of Bayer and Lagarias [3]:
Lemma 5.2. Consider the affine transformation Rx þ ~x, where R is non-singular. Then, if x is the analytic
center of fx : Bx 6 bg, Rx þ ~x is the analytic center of fw : BR 1 w 6 b þ BR 1~xg.
We are now ready to establish the main result of this section.
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
283
Theorem 5.2. The analytic center for any semi-prime representation of a polytope is the same.
Proof. Let P ðU ; uÞ and P ðU 0 ; u0 Þ be two semi-prime representations of P with corresponding separated data
ðA; a; B; bÞ and ðA0 ; a0 ; B0 ; b0 Þ. From Lemma 5.1, NðAÞ ¼ NðA0 Þ, and we denote this space by V. Also,
Aþ a ¼ A0þ a0 , and this vector is denoted by v. Let q ¼ dimðVÞ. If q ¼ n, we have the full dimensional case
covered by Theorem 5.1.
Suppose q < n. Then, there exists a non-singular R 2 Rnn such that for any w 2 V,
u
Rw ¼
;
0
u
where u 2 Rq . So, Ax ¼ a () x ¼ v þ R 1
, and
0
u
6 b Bv () ½BR 1 Ju u 6 b Bv;
x 2 P () BR 1
0
where Ju is the index set associated with u and the set subscript indicates columns of BR 1 . Similarly,
x 2 P () ½B0 R 1 Ju u 6 b0 B0 v. Now consider the following full q dimensional polytope:
P0 ¼ fu 2 Rq : ½BR 1 Ju u 6 b
q
0
1
¼ fu 2 R : ½B R Ju u 6 b
Bvg
0
B0 vg:
These inequalities cannot contain a redundancy since that would violate the assumption that there are no
redundant inequalities in our original representations of P. Therefore, Theorem 5.1 implies that both
representations have the same analytic center:
def
BvÞ ¼ u ð½B0 R 1 Ju ; b0 B0 vÞÞ¼ u :
1 u
Lemma 5.2 implies that R
is the analytic center of both representations:
0
u
x ðU ; uÞ ¼ R 1
¼ x ðU 0 ; u0 Þ:
0
u ð½BR 1 Ju ; b
To illustrate the proof of Theorem 5.2, consider the previous example. We have v ¼ 0 and
V ¼ fx 2 R2 : x1 ¼ x2 g. Let R be the rotation matrix such that Rx ¼ ðu; 0ÞT for any x 2 V. The matrix, R,
and its inverse are:
!
"
!
"
1
1 1
1 1
1
1
R ¼ pffiffiffi
and R ¼ pffiffiffi
:
1 1
2
2 1 1
In all four different representations,
!
"
# i 1$
1
1
p
ffiffi
ffi
and b
B R Ju ¼
2 1
0
Bv¼
;
1
i
for i ¼ 1; 2; 3; 4:
pffiffiffi
Thus, the reduced full dimensional polytope is simply fu : 0 6 u 6 2g, and the prime analytic center of this
polytope is u ¼ p1ffiffi2. Mapping this back to P, we have the analytic center:
1=2
1 u
¼
;
x ¼R
0
1=2
which is the same for all prime representations.
This example shows the importance of transforming V so that it appears full dimensional. We chose to
‘‘zero-out’’ the last n dimðVÞ variables, but any collection of n dimðVÞ variables whose columns in A
are linearly independent could have been eliminated. What matters is that the transformation is invertible.
284
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
In light of Theorem 5.2, we refer to the prime analytic center, which gives us a point that is independent
from any particular semi-prime representation of P. Formally, we introduce the following:
Definition. The prime analytic center of P is the unique analytic center obtained from any semi-prime
representation, P ðU ; uÞ.
Since the prime analytic center is independent of a particular choice of ðU ; uÞ, we denote it as a function
of the polytope, xðPÞ. The following corollary to Theorem 5.2 shows that the prime analytic center is the
limit of a repelling path.
Corollary 5.2.1. Let P ðU ; uÞ be a representation of P with semi-prime representation P ðUI ; uI Þ. Then,
lim xðl; U ; u; IÞ ¼ xðPÞ:
l!1
Proof. The definition of P I implies
P I ðU ; uÞ ¼ P I ðUI ; uI Þ:
From Theorem 5.2, P I ðUI ; uI Þ ¼ fxðPÞg. Theorem 3.2 now implies
lim xðl; U ; u; IÞ ¼ x^ðU ; u; IÞ 2 P I ðU ; uÞ ¼ P I ðUI ; uI Þ ¼ fxðPÞg:
l!1
The corollary says that if the repelling constraints comprise a semi-prime representation, the repelling
path terminates at the prime analytic center of P. Interestingly, once the implied equalities are separated
from the inequalities, a semi-prime representation can be found by removing the redundant inequalities in
any fashion (see Telgen [29]). So, once all the redundant inequalities are identified, the indices of the remaining inequalities may be used to form I.
We now establish a continuity result for the prime analytic center. Unfortunately, even with equality
rank preserving sequences, the prime analytic center is not a continuous function over semi-prime representations. This follows because it is possible to have semi-prime representations, P ðU k ; uk Þ ¼ Pk , where
fðU k ; uk Þg ! ðU ; uÞ, but have that P ðU ; uÞ is not a prime representation of P. An example is shown in Fig.
3. The unit square is perturbed by replacing the constraint x1 6 1 by the two constraints x1 þ ð1=kÞx2 6
1 þ ð1=kÞ and x1 ð1=kÞx2 6 1. The sequence of prime representations converges to a non-prime representation of the
unit square, due to the redundancy of these inequalities. In this case the analytic center
moves to 13; 12 , skewed by having a weight of 2 on the upper bound, x1 6 1.
We want to restrict perturbing P so that this kind of pathology does not happen. We say fPk g is a semiprime sequence if there exist semi-prime representations P ðU k ; uk Þ ¼ Pk such that fðU k ; uk Þg ! ðU ; uÞ, and
P ðU ; uÞ is a semi-prime representation of P. A function, f ðPÞ is semi-prime continuous if
lim f ðPk Þ ¼ f ðPÞ for all semi-prime sequences; fPk g ! P:
Pk !P
Theorem 5.3. Let ðU ; uÞ be a semi-prime representation of P. Then xðPÞ is semi-prime continuous over
EðU ; uÞ.
Proof. Let fðU k ; uk Þg be a semi-prime sequence in EðU ; uÞ. Using Theorem 3.1, we have
fxðPk Þg ¼ fx ðU k ; uk Þg ! x ðU ; uÞ ¼ xðPÞ;
and the result is proven.
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
285
Fig. 3. A sequence of prime representations with non-prime limit.
In this section we have shown that there is a unique analytic center for all semi-prime representations of
a polytope. This prime analytic center is tied more closely to the geometry of a polytope than is a non-prime
analytic center because it does not depend on redundant inequalities. Furthermore, the prime analytic
center is continuous over semi-prime, equality rank preserving sequences.
6. Relative effects of repelling inequalities
In this section we investigate how repelling inequalities interact. Specifically, collections of repelling
inequalities are characterized by whether or not they have common objectives. We begin with an inquiry
into collections with conflicting objectives and conclude with a discussion of collections that have common
objectives.
As mentioned in Section 3, the repelling path can be the same for different collections of repelling inequalities. For example, in Fig. 2 the repelling paths corresponding to I ¼ f4g and I ¼ f1; 3; 4g are the
same. This is because inequalities 1 and 3 oppose each other; a concept that is formally defined below.
Definition. The inequalities indexed by J are opposing inequalities, relative to the set I, if
xðl; U ; u; IÞ ¼ xðl; U ; u; I [ J Þ;
for all l > 0:
The next result shows that the analytic center of a polytope is the prime analytic center only when the
inequalities can be partitioned into a prime representation and a corresponding collection of opposing
inequalities. Consequently, this result completely defines the set of representations for which the analytic
center is the prime analytic center.
286
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Theorem 6.1. We have x ðU ; uÞ ¼ xðPÞ if, and only if, the inequalities, Bx 6 b, can be partitioned into BI x 6 bI
and BI x 6 bI such that fx : Ax ¼ a; BI x 6 bI g is a semi-prime representation of P, and the inequalities indexed
by I are opposing inequalities relative to I.
Proof. We first show that x ðU ; uÞ ¼ xðPÞ is a sufficient condition to guarantee the stated partition of the
inequalities. From [29], once the implied equalities are separated from Ux 6 u, a semi-prime representation
can be found by removing redundant inequalities in any fashion. Let I be comprised of the indices from the
remaining inequalities, so that I indexes the redundant inequalities. Since xðl; U ; u; I [ I Þ solves
(
)
m
X
max ðl þ 1Þ
lnðbi Bi xÞ : x 2 P ðU ; uÞ ;
i¼1
we have xðl; U ; u; I [ I Þ ¼ x ðU ; uÞ ¼ xðPÞ, for all l > 0. From Lemma 3.6 and the definition of x ðU ; uÞ we
have
X
X
lnðbi Bi xðPÞÞ P
lnðbi Bi xÞ; for all x 2 P ðU ; uÞ; and
i2I
m
X
i2I
lnðbi
Bi x ðU ; uÞÞ P
i¼1
m
X
lnðbi
Bi xÞ;
for all x 2 P ðU ; uÞ:
i¼1
Since x ðU ; uÞ ¼ xðPÞ, these last two inequalities imply that for any l > 0,
l
X
lnðbi
Bi x ðU ; uÞÞ þ
i2I
m
X
lnðbi
Bi x ðU ; uÞÞ P l
X
i2I
i¼1
lnðbi
Bi xÞ þ
m
X
lnðbi
Bi xÞ;
i¼1
for all x 2 P ðU ; uÞ:
Since the right-hand side is maximized for x ¼ xðl; U ; u; IÞ, we have xðl; U ; u; IÞ ¼ x ðU ; uÞ ¼ xðPÞ. This
completes the proof of sufficiency because we now have
xðl; U ; u; IÞ ¼ x ðU ; uÞ ¼ xðPÞ ¼ xðl; U ; u; I [ I Þ:
We now establish necessity. As previously mentioned, since I [ I indexes all the inequalities,
xðl; U ; u; I [ I Þ ¼ x ðU ; uÞ. Furthermore, using Corollary 5.2.1 and the assumption that the inequalities
indexed by I are opposing inequalities relative to I,
xðPÞ ¼ lim xðl; U ; u; IÞ ¼ lim xðl; U ; u; I [ I Þ ¼ lim x ðU ; uÞ ¼ x ðU ; uÞ:
l!1
l!1
l!1
We now consider collections of repelling inequalities that have common repelling effects. In particular,
the inequalities BI x 6 bI and BJ x 6 bJ are said to have a common repelling effect if P I ðU ; uÞ ¼ P J ðU ; uÞ.
When this happens, the inequalities indexed by I are said to ally with the inequalities indexed by J.
Definition. The inequalities indexed by I ally pairwise if, for any pair i; j 2 I, we have P fig ðU ; uÞ ¼ P fjg ðU ; uÞ.
Below, Theorem 6.2 shows that if a collection of inequalities ally pairwise, then subcollections ally
collectively.
Theorem 6.2. If the inequalities indexed by I ally pairwise, then for any subsets I1 and I2 of I,
P I1 ðU ; uÞ ¼ P I2 ðU ; uÞ.
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
287
Proof. Let I1 and I2 be subsets of I. Then, for all i; j 2 I,
P fig ðU ; uÞ ¼ argmaxfbi
Bj x : x 2 P ðU ; uÞg ¼ P fjg ðU ; uÞ:
Bi x : x 2 P ðU ; uÞg ¼ argmaxfbj
Using the fact the sum of the individual maxima is less than or equal to the maximum of the sum, we have
)
)
(
(
X
X
argmax
lnðbi Bi xÞ : x 2 P ðU ; uÞ ¼ argmax
lnðbi Bi xÞ : x 2 P ðU ; uÞ ;
i2I1
i2I2
which is equivalent to P I1 ðU ; uÞ ¼ P I2 ðU ; uÞ.
In light of Theorem 6.2, we define a collection of inequalities to be mutual allies if every subcollection has
a common repelling affect.
Definition. The inequalities indexed by I are said to be mutual allies if P I1 ðU ; uÞ ¼ P I2 ðU ; uÞ for any subsets I1
and I2 of I.
We can thus restate Theorem 6.2 as follows.
Corollary 6.2.1. The inequalities indexed by I ally pairwise if, and only if, they are mutual allies.
The last concept of this section is that of domination. The idea here is that a collection of repelling
inequalities can be a super ally to another collection of repelling inequalities and hence dominate the repelling effect.
Definition. The collection I1 is said to dominate the collection I2 if P I1 ðU ; uÞ P I2 ðU ; uÞ.
In Fig. 2, the set f1; 2g dominates the set f1g because
P f1;2g ðU ; uÞ ¼ fð1; 1Þg fð1; fÞ : 0 6 f 6 1g ¼ P f1g ðU ; uÞ:
Just because I2 is a subset of I1 does not necessarily imply that I1 dominates I2 . This is seen from the example
illustrated in Fig. 2, where P f1;2;3;4g ðU ; uÞ ¼ fð12; 12Þg and P f2g ¼ fðf; 1Þ : 0 6 f 6 1g. In fact, this example
shows that a subset need not ally with the collective repelling effect. However, the last theorem of this
section shows that a subset relationship does imply an ally structure provided the individual collections of
repelling inequalities are mutual allies.
Theorem 6.3. Let I1 and I2 index two sets of mutual allies. Then, if I1 dominates I2 , P I1 [I2 ðU ; uÞ ¼ P I1 ðU ; uÞ.
Proof. Let x 2 P I1 ðU ; uÞ P I2 ðU ; uÞ. Then, for any i 2 I1 [ I2 ,
bi
Bix P maxfbi
Bi x : x 2 P ðU ; uÞg:
So,
X
i2I1 [I2
(
lnðbi
BixÞ P max
X
)
lnðbi
Bi xÞ : x 2 P ðU ; uÞ ;
i2I1 [I2
which implies x 2 P I1 [I2 ðU ; uÞ. Hence, P I1 ðU ; uÞ P I1 [I2 ðU ; uÞ.
288
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Let ~x 2 P I1 [I2 . Then,
X
BixÞ ¼
lnðbi
i2I1 [I2
Notice that
X
lnðbi
X
(
lnðbi
Bi~xÞ ¼ max
i2I1 [I2
Bi~xÞ >
X
i2I1
lnðbi
X
)
lnðbi
Bi xÞ : x 2 P ðU ; uÞ :
BixÞ:
i2I1
leads to the immediate contradiction that x 62 P I1 ðU ; uÞ. So,
X
X
lnðbi Bi~xÞ 6
lnðbi BixÞ:
i2I1
ð3Þ
i2I1
Suppose the inequality in (3) is strict. Then, the equality in (2) implies
X
X
lnðbi Bi~xÞ >
lnðbi BixÞ:
I2 nI1
ð2Þ
i2I1 [I2
ð4Þ
I2 nI1
However, because x 2 P I2 ðU ; uÞ and I2 is a set of mutual allies, x 2 P I2 nI1 ðU ; uÞ, which is a contradiction to
the inequality in Eq. (4). Hence,
X
X
lnðbi Bi~xÞ ¼
lnðbi BixÞ;
i2I1
and ~x 2 P I1 ðU ; uÞ.
i2I1
7. Avenues for further research
The concept of repelling inequalities and the uniqueness of the analytic center for semi-prime representations comprise the beginning of many possible avenues for fruitful research. Here are some of those.
1. The relative effects of repelling inequalities suggest a new insight into multiple objective linear programming. Different from the approaches of Arbel [2] and Abhyankar et al. [1], the results presented here suggest an extension of Renegar’s algorithm, considering each objective as repelling. More broadly, this
theory can lend insight into the underlying economics of MOLP.
2. There could be some special benefits to having the prime analytic center of the optimality region. For
example, the prime analytic center might be a desirable solution from which to conduct parametric analysis.
3. Discovering redundancies during the course of a central path-following algorithm might accelerate convergence by dropping them. If so, an explanation for this might stem from having a path of prime analytic centers.
4. The limit of a repelling path is the analytic center of a polytope whose representation need not be prime.
There is, however, always some set of weights for which the point is a weighted prime analytic center
(removing redundancies). How do these weights relate to the original system? Is there a connection to
weighting multiple objectives if the repelling inequalities are the objective cuts, and the rest of the polytope is given by a prime representation?
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
289
Acknowledgements
The authors gratefully acknowledge comments by Jos F. Sturm and Tamas Terlaky on an earlier draft of
this paper.
References
[1] S.S. Abhyankar, T.L. Morin, T. Trafalis, Efficient faces of polytopes: Interior point algorithms, parameterization of algegriac
varieties and multiple objective optimization, in: J. Lagarias, M. Todd (Eds.), Mathematical Developments Arising from Linear
Programming, American Mathematical Society, Providence, RI, 1990, pp. 319–341.
[2] A. Arbel, A multiobjective interior primal–dual linear programming algorithm, Computers and Operations Research 21 (4) (1994)
433–445.
[3] D. Bayer, J. Lagarias, The nonlinear geometry of linear programming I, Transactions of the American Mathematical Society 314
(2) (1989) 499–526.
[4] A. Boneh, Preduce – a probabilistic algorithm identifying redundancy by a random feasible point generator (RFPG), in: M.
Karwan, V. Lotif, J. Telgen, S. Zionts (Eds.), Lecture Notes in Economics and Mathematical Systems, Chapter 10, SpringerVerlag, Heidelberg, Germany, 1982, pp. 108–134.
[5] A. Boneh, R. Caron, F. Lemire, J. McDonald, J. Telgen, T. Vorst, Note on prime representations of convex polyhedral sets,
Journal of Optimization Theory and Applications 61 (1) (1989) 137–142.
[6] S. Campbell, C. Meyer Jr., Generalized Inverses of Linear Transformations, Fearon Pitman Publishers Inc., Belmont, CA, 1979.
[7] R.M. Freund, R. Roundy, M.J. Todd, Identifying the set of always-active constraints in a system of linear inequalities by a single
linear program, Working paper no. 1674-85 (rev.), Sloan School of Management, MIT, Cambridge, MA, 1985.
[8] C. Gonzaga, Path-following methods for linear programming, SIAM Review 34 (2) (1992) 167–224.
[9] H.J. Greenberg, The use of the optimal partition in a linear programming solution for postoptimal analysis, Operations Research
Letters 15 (4) (1994) 179–185.
[10] H.J. Greenberg, Consistency, redundancy and implied equalities in linear systems, Annals of Mathematics and Artificial
Intelligence 17 (1996) 37–83.
[11] H.J. Greenberg. Mathematical Programming Glossary. World Wide Web, http://www.cudenver.edu/hgreenbe/glossary/
glossary.html, 1996–2001.
[12] O. G€
uler, Y. Ye, Convergence behavior of interior-point algorithms, Mathematical Programming 60 (2) (1993) 215–228.
[13] A.G. Holder, Sensitivity Analysis and the Analytic Central Path. Ph.D. thesis, Mathematics Department, University of Colorado
at Denver, Denver, CO, 1998.
[14] A.G. Holder, J. Sturm, S. Zhang, Marginal and parametric analysis of the central optimal solution, INFOR 39 (4) (2001) 394–415.
[15] P. Huard, Resolution of mathematical programming with nonlinear constraints by the method of centres, in: J. Abadie (Ed.),
Nonlinear Programming, Chapter 8, John Wiley and Sons, New York, 1967, pp. 209–219.
[16] B. Jansen, C. Roos, T. Terlaky, J.-Ph. Vial, Long-step target following algorithms for linear programming, Mathematical
Methods of Operations Research 44 (1996) 11–30.
[17] N. Karmarkar, A new polynomial-time algorithm for linear programming, Combinatorica 4 (1984) 373–395.
[18] L. Khachiyan, A polynomial algorithm in linear programming, Doklady Akademiia Nauk SSSR 244 (1979) 1093–1096.
[19] L. McLinden, An analogue of moreau’s proximation theorem, with applications to the nonlinear complementary problem, Pacific
Journal of Mathematics 88 (1) (1980) 101–161.
[20] S. Mizuno, M. Todd, Y. Ye, A surface of analytic centers and primal-dual infeasible-interior point algorithms for linear
programming, Mathematics of Operations Research 20 (1) (1995) 135–162.
[21] J. Renegar, A polynomial-time algorithm, based on Newton’s method, for linear programming, Mathematical Programming 40
(1988) 59–93.
[22] C. Roos, T. Terlaky, J.-Ph. Vial, Theory and Algorithms for Linear Optimization: An Interior Point Approach, John Wiley and
Sons, New York, 1997.
[23] A. Schrijver, Theory of Linear and Integer Programming, John Wiley and Sons, New York, 1986.
[24] G. Sonnevend, An ‘‘analytic centre’’ for polyhedrons and new classes of global algorithms for linear (smooth, convex)
programming, in: A. Prekopa, J. Szelezsan, B. Strazicky (Eds.), Lecture Notes in Control and Information Sciences, vol. 84,
Springer-Verlag, Heidelberg, Germany, 1986, pp. 866–875.
[25] G. Sonnevend, An implementation of the method of analytic centers, in: A. Bensoussan, J. Lions (Eds.), Lecture Notes in Control
and Information Sciences, vol. 111, Springer-Verlag, Heidelberg, Germany, 1988, pp. 297–308.
[26] G. Sonnevend, New algorithms in convex programming based on a notion of ‘‘centre’’ (for systems of analytic inequalities) and on
rational extrapolation, in: K.H. Hoffman, J.B. Hiriat-Urruty, C. Lemarechal, J. Zowe (Eds.), Trends in Mathematical
290
[27]
[28]
[29]
[30]
[31]
R.J. Caron et al. / European Journal of Operational Research 143 (2002) 268–290
Optimization: Proceedings of the 4th French–German Conference on Optimization in Irsee, West Germany, April 1986, vol. 84,
Birkhauser Verlag, Basel, Switzerland, 1988, pp. 311–327.
G. Sonnevend, Applications of the notion of analytic center in approximation (estimation) problems, Journal of Computational
and Applied Mathematics 28 (1989) 349–358.
J. Telgen, Redundancy and Linear Programs, Ph.D. thesis, Erasmus University, Rotterdam, The Netherlands, 1979.
J. Telgen, Minimal representation of convex polyhedral sets, Journal of Optimization Theory and Applications 38 (1982) 1–24.
S. Wright, Primal-Dual Interior-Point Methods, SIAM, Philadelphia, PA, 1997.
Y. Ye, Interior Point Algorithms Theory and Analysis, John Wiley and Sons, New York, 1997.