Conference Paper - Robotics and Intelligent Systems Lab
advertisement

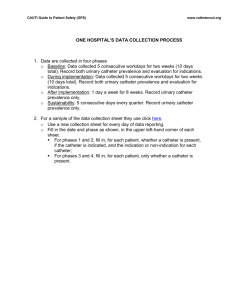
© 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. An Evaluation of Closed-Loop Control Options for Continuum Manipulators Ryan S. Penning, Jinwoo Jung, Nicola J. Ferrier, and Michael R. Zinn, Member, IEEE Abstract—Continuum manipulators are gaining widespread acceptance in commercial robotics, particularly in the medical field, where their compliance allows a large benefit for patient safety. However, this compliance also makes precise position control of these manipulators quite difficult. This paper presents two closed-loop control implementations applied to a small scale continuum manipulator. These implementations are both based on manipulator tip position feedback from an electromagnetic sensor. The command tracking and disturbance rejection properties of the two control implementations are shown to be approximately equivalent, and provide improved position control when compared to open-loop control, without sacrificing system stability. I. INTRODUCTION I N recent years, there have been significant advancements in minimally invasive medical telerobotic systems, resulting in a number of commercially available systems [1,2,3,4]. As the efficacy of these systems has been demonstrated, researchers have begun to investigate interventional systems in areas beyond more traditional robotic surgery – where access is more challenging due to size or other anatomical or clinical constraints. Examples of such systems include small continuum robotic systems for vascular or neurological interventions [1,2,3]. These systems often possess undesirable characteristics which adversely affect performance, including device friction and hysteresis, actuation and drive-train nonlinearities, and lack of accurate sensors. As a result, reduced positioning accuracy and dexterity, as compared to traditional rigid robotic systems, is common. To improve system performance while enabling more autonomous capabilities, a number of researchers have focused on the use of in-vivo feedback control [1,3,5,6,7,8,9,10]. In-vivo feedback is the use of position, orientation, shape or other data collected while the manipulator is at work inside the patient collected via radiographic, electromagnetic and other Manuscript received September 16, 2011. This work was supported in part by the Wisconsin Alumni Research Foundation under Grant MSN106564 and MSN136217. R. S. Penning is a graduate student with the Mechanical Engineering Department, University of Wisconsin – Madison, Madison, WI 53706 USA (e-mail:rpenning@wisc.edu) J. Jung is a graduate student with the Mechanical Engineering Department, University of Wisconsin – Madison, Madison, WI 53706 USA (e-mail:jjung22@wisc.edu) N. J. Ferrier is with the Mechanical Engineering Department, University of Wisconsin – Madison, Madison, WI 53706 USA (e-mail: ferrier@engr.wisc.edu) M. R. Zinn is with the Mechanical Engineering Department, University of Wisconsin – Madison, Madison, WI 53706 USA (phone: 608-263-2893; fax: 608-265-2316 e-mail: mzinn@wisc.edu) methods. Advancements in sensor and actuator technology and feedback control strategies for in-vivo use have demonstrated marked improvements in performance and efficacy [7,11,12,13,14,15]. This paper represents the first direct comparison of different control architectures for use with continuum manipulators. Others have utilized the control to alter and improve the dynamics of the manipulator in a 3D space [8,16,17,18,19]. In [7], the authors utilized a configuration space controller to control the shape of a multi-segment continuum manipulator. One field that suffers from the difficulties of flexible catheter manipulators is interventional electrophysiology, in which radiofrequency ablation within the atria of the heart is used to correct abnormal heart rhythms. The open volume of the atria presents unique challenges in manipulating a flexible catheter, and may benefit from closed loop control of the catheter tip position. In a previous paper, [22], we investigated the feasibility of closed loop control of a continuum manipulator in a threedimensional open volume. This paper expands on the exploration and details two closed-loop control options for continuum manipulators: joint space and task space control. The following sections detail our control implementations, explore the dynamic properties of the catheter, and compare the command tracking and disturbance rejection performance of both closed loop control implementations. II. SYSTEM OVERVIEW Fig. 1 Overall system configuration. The catheter can be driven either through direct operator input, or a pre-programmed trajectory, with the latter option allowing for repeatable experimentation. © 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. utilizing a trakSTAR electromagnetic location system (Ascension Technologies, Burlington, VT). This system allows us to feed a small receiver (approximately 1.8mm in diameter) down the center lumen of the catheter. This sensor is fixed in place at the catheter tip, and provides full position and orientation feedback, with an accuracy of approximately 1.4mm. Since this sensor operates on electromagnetic principles, it is sensitive to distortion induced by nearby metallic objects and electrical noise. All efforts have been made to reduce EM noise in the testing environment, and the catheter and testing area are composed entirely of non-metallic materials. Fig. 2 Catheter Design and Mechanics The left image shows the robotic catheter itself, while the right shows the splayer block which attaches to the base of the catheter. This splayer provides both articulation motion (via the 4 pulleys), and insertion motion. To allow us to evaluate various control schemes for continuum manipulators, we have constructed the Continuum Robotics Electromechanical System Testbed (CREST). This, in concert with our own 3-DOF catheter prototype and a commercial electromagnetic localization system, represents a complete system capable of closed loop control (Fig. 1). A more thorough description of this system is available in [22], but we present a brief overview here for clarity. A. CREST The CREST system is an 11-DOF servomechanical system capable of independently driving two catheters. Each catheter is attached to a pulley block with four motors to control each of the four pull-wires. Each pulley block can also be moved independently to extend or retract the catheter. In addition, the entire mechanism can be rotated about its longitudinal axis. For the controls implemented in this paper, we will only make use of a single pulley block and its associated insertion motion, with no longitudinal rotation. B. Catheter and Tip Position Tracker The catheter used here is identical to the design we presented in [22]. It consists of a PTFE spine with machined slots to increase its flexibility (Fig. 2). Four diametrically opposed control wires run through channels machined along the length of this spine, and are held in place using an expandable plastic mesh. A central lumen allows sensors and other instruments to be fed down the length of the catheter. The catheter itself extends through a stiff, rigidly mounted sheath. By altering the length of the catheter that extends from this sheath, and pulling on the proper pull wires, the catheter can be manipulated throughout a 3D workspace. In order to track the position of the catheter tip, we are C. Catheter Joint and Task space Definition In our investigations, we have focused solely on positioning of the catheter tip. At present, we have made no attempt to control either catheter shape or tip rotation. For this paper, we have selected two different generalized coordinate systems to define the configuration of the catheter. These will be referred to as task space and joint space. We define task space to be the (x,y,z) coordinates of the tip of the catheter relative to the center point of the stiff sheath exit. Positive y is defined to be in the direction of catheter extension, and positive z to be upwards. This allows for an intuitive description of the catheter tip position. However, because this coordinate frame is not based on the mechanics and kinematics of the catheter, significant coupling exists among the actuated axes. That is, a change along a single task space axis may require multiple actuation actions. This motivates the use of joint space coordinates. By defining tip position as a function of two orthogonal articulations and total insertion length, this coordinate space more closely matches the actuated axes, and allows for decoupling of insertion and articulation actuation coordinates. By assuming a constant curvature along the length of the catheter, these coordinates can be obtained via a closed form solution as defined in [20,21] and illustrated in Fig. 3. Fig. 3 Coordinate space definition. The joint space coordinate frame is based on an assumption of constant curvature of the catheter. (That is, the catheter always attains a shape that represents some portion of a circle.) © 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. Fig.4 Control architectures under investigation. A) Task space control implementation. B) Joint space control implementation III. CONTROL ARCHITECTURE Control of our catheter prototype presents several inherent challenges. Chief among these is the non-linear behavior of the catheter, which can arise due to internal friction, device hysteresis and a host of other factors. In our previous work [22], a joint space controller was implemented as a proof of concept for closed loop control of a continuum manipulator in an open volume. Since this previous publication, we have more thoroughly evaluated both this joint space controller and a task space controller. Both of these controllers were formulated based on several assumptions. First, that both the desired position and the measured position are available only in task space. The desired position will typically be provided by the human operator. Since task space allows for a more intuitive specification of this position, this is what we have chosen to implement in our workstation software. Similarly, the feedback from the trakSTAR device is provided in Cartesian coordinates. Second, catheter dynamics are assumed to be negligible. This assumption is valid for the relatively low-speed movements specified by the clinician. However, for higher speed movements, such as compensating for the motion of a beating heart [8], it will not hold. Finally, the inverse kinematics are based on an assumption of constant curvature in the catheter. For this work, this is assumed to be a reasonable approximation of the true catheter behavior and is thus appropriate for coordinate transformations. A. Task Space Our task space control implementation (Fig 4A) is based on the error as calculated in the task space frame as defined above. A simple integral controller is then applied on each axis. The inverse Jacobian is utilized to transform the action defined by this control into joint space, and from there, into catheter actuation space via the CREST inverse kinematics. This inverse Jacobian is calculated numerically based on the inverse kinematics with an incremental disturbance in each of the three task space directions is applied, and the resulting change in position is determined. This necessitates solving the (closed form) inverse kinematics a total of six times. At present, this is easily accomplished within each major cycle of the control. If a more complex form of inverse kinematics/dynamics model is chosen in the future, this could potentially exceed the allotted computation time, and an approximated Jacobian may need to be used. Our assumption of negligible catheter dynamics yields an open-loop device transfer function with unity gain and no phase lag. Thus, an integral controller will modify this response with a -20dB per decade gain slope and a constant 90 degree phase lag. This yields a 90 degree phase margin, and a cross-over frequency that can be adjusted by changing the integral gain. As will be discussed in III.D, this allows us to limit the bandwidth of our controller to be below the natural frequencies of the catheter itself. An integral control term also serves to eliminate the presence of an algebraic loop in the closed-loop transfer function. B. Joint Space Unlike the task space control discussed above, our joint space control implementation (Fig 4B) makes direct use of the device inverse kinematics, rather than the inverse Jacobian. These equations are solved to convert both commanded and measured position to joint space. For the same arguments presented above, a simple integral control is used to generate the control action, which is then passed through the inverse mechanics of the CREST to generate the actuation space commands. © 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. C. Architecture Comparison Although task and joint space control represent very different control architectures, under a specific set of assumptions, they can be shown to produce nearly identical results. For this, we will assume that the inverse kinematics of the device can be linearized about a given operating point. Additionally, we will assume that the device will remain within the local neighborhood of this operating point. These assumptions allow us to manipulate the block diagrams of the control architectures following classical linear system rules. Bringing the two calculations of inverse kinematics in the joint space system to the inside of the summing junction, yields a system that is very similar in structure to the task space controller (Fig. 5). The inverse Jacobian is numerically calculated as: (1) Where ε is an incremental displacement along each axis and M-1 is the linearized inverse kinematics of the device, evaluated at the selected operating point. Under our linearized system approximation, (1) can be simplified to: (2) Thus, for the narrow set of approximations described here, and assuming the integral controller values are tuned identically, both task and joint space control should yield similar actuation commands (qe) for a given error, and thus both systems should perform almost identically. Note that for higher frequencies or large errors, these results will not necessarily hold true. D. System Identification In order to experimentally verify our assumptions on catheter dynamics, we have attempted to characterize the frequency response of both the articulation and insertion axes of our device. While these axes are powered by identical motors, the mechanics of each results in differing frequency responses. Thus, a control bandwidth that is appropriate for one axis will not necessarily yield acceptable performance on a different axis. To evaluate the open loop frequency response of each axis, a chirp position command was input to the system with the catheter in its neutral position. The resulting position was recorded (utilizing the trakSTAR sensor). This information was then analyzed using Matlab’s tfestimate command. The results, shown in Fig 6, show Fig. 5 Manipulation of the operating point model block diagram yields very similar structures between task and joint space control. Fig. 6 Catheter response to 0.1cm chirp command swept from 0.1 to 20Hz. Frequencies beyond 20Hz were not excited in order to protect the CREST hardware. the significantly different response between the insertion and articulation axes. While both show similar bandwidths (approximately 10-12 Hz), the articulation axis experiences a natural frequency near 7 Hz, while the insertion axis shows a natural frequency closer to 10Hz. In our investigations of closed loop control, we make the assumption that the dynamics of the catheter system are negligible. For this assumption to hold, we must therefore limit our analysis to frequencies well below these frequencies. As such, we will assume for frequencies below 5 Hz, the dynamics of the catheter are negligible. These results also highlight the competing constraints imposed by the safety requirements and performance expectations of the system. In general, the system bandwidth must be high enough that the physician experiences minimal time lag when commanding the catheter. To increase the system bandwidth, it would be necessary to increase the natural frequency of the articulation axis by increasing the relative stiffness of the catheter. This also benefits the system by reducing the effects of internal friction. However, in medical applications a stiffer catheter is more likely to injure nearby tissue, raising the risk of serious complications. We have attempted to compromise between these constraints by developing a catheter that is relatively stiff, while still being within the bounds of being medically reasonable. IV. EXPERIMENTAL RESULTS To compare the control architectures discussed in III, a series of experiments was conducted to evaluate both the command tracking and disturbance rejection properties of each controller. For each experiment, control wire tensioning was performed via an automated routine, ensuring repeatable results. In addition, the control wires were allowed to completely slack prior to this tensioning routine. This allowed the manipulator to begin from a consistent configuration each time, minimizing the effects of © 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. the history-dependent behavior of the device. For all evaluations the catheter was initialized to its home position: an insertion length of 8cm, and no articulation, or (0,8,0)cm in task space. A. Command Tracking Our primary focus in evaluating these control architectures is on the ability of each to track a given input command. This is critical for safe, efficient medical operation. Improper positioning can result in injury to cardiac tissue, or difficulty in positioning the catheter on the problematic tissue. To explore the command tracking capabilities of both the joint space and task space control architectures, we utilized a pre-programmed trajectory. This trajectory is a 10cm square normal to the longitudinal axis of the catheter and centered about the catheter’s home position (Fig. 7). A square trajectory was chosen so that all three axes of manipulation (two articulation directions and the insertion axis) would be involved. At the relatively low articulations this trajectory required, control wire friction is not a significant contributor to error, as control wire tension is relatively low. This low tension also minimizes stretching of the control wires. Figure 8 shows the results of our control system evaluation. Overall, both architectures perform similarly, and showed great improvement relative to open loop control. However, the task space architecture appears to have more difficulty tracking the corners of the trajectory accurately, resulting in the catheter tip tracing small loops. This could potentially be due to the different maximum speed of each physical axis of the device. While the pitch and yaw articulation axes are quite fast, the insertion axis is much slower. Since each one of these axes are entailed in the control of a given task-space direction, these differing time constants cannot be compensated for. Under joint space control however, these axes are under separate control, and can thus be tuned more appropriately. Fig. 8 Catheter command tracking performance. Task and Joint Space controllers performed similarly to each other, and both show significant improvement over open-loop performance. B. Disturbance Rejection The ability of each control architecture to respond to and recover from disturbances is critical to safe and effective invivo operation of the catheter. A patient’s heartbeat and respiration both impart significant disturbance forces to the catheter. If this disturbance results in unstable behavior, or is not adequately compensated for, serious complications can arise. To evaluate the disturbance rejection capabilities of our control implementations, the catheter was placed in it’s a neutral position (8cm insertion, no articulation), and a 5g mass attached to the tip was dropped, resulting in a nearly instantaneous loading of the catheter. For both control architectures, a representative time history of tip position is shown in Figure 9. One important note is that because the force applied is impulsive and therefore exceeds the 5 Hz maximum for our assumption of negligible dynamics. The effects of this can be seen regardless of control architecture, and manifests as the oscillations seen shortly after applying the force. Overall, no significant difference was observed between the two control architectures. Both were able to recover from this rather substantial disturbance, with each taking approximately 3 seconds to do so. V. CONCLUSIONS AND FUTURE WORK Fig. 7 Catheter command tracking test trajectory (shown to scale). Each side of the square was traversed in 6 sec, following a sinusoidal velocity profile. Our evaluation of joint and task space control of continuum manipulators shows that both control architectures show very similar results. As supported by our analysis, this is particularly true when errors are kept © 2012 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. [6] [7] [8] [9] [10] [11] Fig. 9 Control reaction to a disturbance At time = 0, a .5g mass was applied to the tip of the catheter (as illustrated in inset). relatively small, and for trajectories that do not require simultaneous articulation and insertion motion. In addition, both architectures show a very similar ability to reject disturbances of the catheter, with no indications of unstable behavior. Future development will focus on two key areas: improving system kinematic/dynamic models, and incorporating additional sensing modalities. We are currently developing a lumped parameter-based model that incorporates control wire friction [23]. This provides a much more accurate prediction of catheter behavior, and will be incorporated into a model-based controller. We are also developing a stereo vision system, intended to emulate the fluoroscopy available in clinical procedures that will be used as an additional estimate of 3-dimensional catheter position. By combining this system with the electromagnetic sensing system currently in use, we hope to leverage the strengths of each measurement technique, to compensate for the weakness of the other. [12] [13] [14] [15] [16] [17] [18] [19] [20] ACKNOWLEDGMENT The authors would like to thank Cathryn Banach for her design and construction of the catheter pulley block. [21] REFERENCES [22] [1] [2] [3] [4] [5] Gassert, R., et al., MRI/fMRI-compatible robotic system with force feedback for interaction with human motion. Mechatronics, IEEE/ASME Transactions on, 2006. 11(2): p. 216-224. Goldenberg, A.A., et al., Robotic System for Closed-Bore MRIGuided Prostatic Interventions. Mechatronics, IEEE/ASME Transactions on, 2008. 13(3): p. 374-379. Krieger, A., et al., Design of a novel MRI compatible manipulator for image guided prostate interventions. Biomedical Engineering, IEEE Transactions on, 2005. 52(2): p. 306-313. Melzer, A., et al., INNOMOTION for Percutaneous Image-Guided Interventions. Eng. Medicine and Biology Magazine, IEEE, 2008. 27(3): p. 66-73. Arai, F., et al. Intelligent assistance in operation of active catheter for minimum invasive surgery. Robot and Human Communication, 1994. RO-MAN '94 Nagoya, Proceedings., 3rd IEEE International Workshop on. 1994. [23] Bailly, Y., A. Chauvin, and Y. Amirat. Control of a high dexterity micro-robot based catheter for aortic aneurysm treatment. in Robotics, Automation and Mechatronics, 2004 IEEE Conference on. 2004. Bajo, Andrea; Goldman, Roger E.; Simaan, Nabil; , "Configuration and joint feedback for enhanced performance of multi-segment continuum robots," Robotics and Automation (ICRA), 2011 IEEE International Conference on , vol., no., pp.2905-2912, 9-13 May 2011. Kesner, S. B.; Howe, R. D.; , "Position Control of Motion Compensation Cardiac Catheters," Robotics, IEEE Transactions on , vol.PP, no.99, pp.1-11, 0 Kapadia, Apoorva; Walker, Ian D.; "Task-space control of extensible continuum manipulators," Intelligent Robots and Systems (IROS), 2011 IEEE/RSJ International Conference on , vol., no., pp.1087-1092, 25-30 Sept. 2011. Beasley, R.A.; Howe, R.D.; "Increasing Accuracy in Image-Guided Robotic Surgery Through Tip Tracking and Model-Based Flexion Correction," Robotics, IEEE Transactions on , vol.25, no.2, pp.292302, April 2009. Bertocchi, U., et al. Sensory feedback exploitation for robot-assisted exploration of the spinal cord. Robotics and Automation, 2006. ICRA 2006. Prcdings 2006 IEEE International Conference on. 2006. Boudjabi, S., A. Ferreira, and A. Krupa. Modeling and vision-based control of a micro catheter head for teleoperated in-pipe inspection. in Robotics and Automation, 2003. Proceedings. ICRA '03. IEEE International Conference on. 2003. Jayender, J., M. Azizian, and R.V. Patel, Autonomous Image-Guided Robot-Assisted Active Catheter Insertion. Robotics, IEEE Transactions on, 2008. 24(4): p. 858-871. Tunay, I. Position control of catheters using magnetic fields. in Mechatronics, 2004. ICM '04. Proceedings of the IEEE International Conference on. 2004. Chitrakaran, V.K., et al., Setpoint regulation of continuum robots using a fixed camera. Robotica, 2007. 25(5): p. 581-586. Jayender, J., M. Azizian, and R.V. Patel. Autonomous robot-assisted active catheter insertion using image guidance. Intelligent Robots and Systems, 2007. IROS 2007. IEEE/RSJ International Conference on. 2007. Mahvash, M.; Dupont, P.E.; "Stiffness Control of Surgical Continuum Manipulators," Robotics, IEEE Transactions on , vol.27, no.2, pp.334345, April 2011. Kesner, S.B.; Howe, R.D.; , "Design and control of motion compensation cardiac catheters," Robotics and Automation (ICRA), 2010 IEEE International Conference on , vol., no., pp.1059-1065, 3-7 May 2010 Gravagne, I.A.; Rahn, C.D.; Walker, I.D.; , "Good vibrations: a vibration damping setpoint controller for continuum robots," Robotics and Automation, 2001. Proceedings 2001 ICRA. IEEE International Conference on , vol.4, no., pp. 3877- 3884 vol.4, 2001 Camarillo, D.B.; Milne, C.F.; Carlson, C.R.; Zinn, M.R.; Salisbury, J.K.; , "Mechanics Modeling of Tendon-Driven Continuum Manipulators," Robotics, IEEE Transactions on , vol.24, no.6, pp.1262-1273 , Dec. 2008. Webster, R.J.;Jones, B.A; , "Design and Kinematic Modeling of Constant Curvature Continuum Robots: A Review," Robotics Research, International Journal of, First Published June 10, 2010. Available: http://ijr.sagepub.com Penning, Ryan S.; Jung, Jinwoo; Borgstadt, Justin A.; Ferrier, Nicola J.; Zinn, Michael R.; , "Towards closed loop control of a continuum robotic manipulator for medical applications," Robotics and Automation (ICRA), 2011 IEEE International Conference on , vol., no., pp.4822-4827, 9-13 May 2011. Jung, Jinwoo; Penning, Ryan S.; Ferrier, Nicola J.; Zinn, Michael R.; , "A Modeling Approach for Continuum Robotic Manipulators: Effects of Nonlinear Internal Device Friction," Intelligent Robots and Systems, 2011 IEEE International Conference on , Sept. 2011, to be published.