978-1-422-2812-0/09/$25.00 ©2009 IEEE 760
advertisement
Digital Control for Improved Efficiency and Reduced Harmonic
Distortion over Wide Load Range in Boost PFC Rectifiers
Fu-Zen Chen and Dragan Maksimovic
Colorado Power Electronics Center
ECE Department, University of Colorado, Boulder, CO 80309-0425
{fchen, maksimov}@colorado.edu
Abstract— This paper addresses control techniques aimed at
improving light-load efficiency and reducing harmonic distortion
in digitally controlled single-phase boost power factor correction
(PFC) rectifiers. Based on a discontinuous conduction mode
(DCM) detection circuit, it is shown how an extension to the
predictive current control law leads to improved current
regulation over wide load range in both continuous conduction
mode (CCM) and in DCM. Furthermore, adaptive switching and
adaptive switching frequency techniques are introduced to
reduce switching losses and improve efficiency at light loads.
Experimental results are shown for a 300W boost PFC rectifier.1
I.
(DCM) over a portion of the ac line period. At light loads, the
boost PFC operates in DCM over the entire ac line period.
Various current control techniques addressing DCM operation
have been addressed in [7-10].
It has been shown that DCM operation and CCM/DCM
mode transitions can result in increased input current
distortion in digitally controlled boost PFC rectifiers [6]. The
increased distortion in DCM is due to the effects of ringing
between the boost inductor and parasitic switch-node
capacitance. In addition, DCM operation affects the dynamics
of the current control loop, which may result in poor current
regulation, requiring modifications to the CCM current control
law [6, 7].
In this paper, the focus on DCM and DCM/CCM operation
of boost PFC rectifiers over wide load range is further
motivated by the increased interest in extending highefficiency operation to intermediate and light loads. The paper
is organized as follows. Predictive current control techniques,
including CCM and modified CCM/DCM approaches are
discussed in Section II. Adaptive switching and adaptive
switching frequency techniques aimed at improving light load
efficiency are introduced in Section III. Experimental results
on a 300W digitally controlled boost PFC rectifier shown in
Fig. 1 are given in Section IV. Section V concludes the paper.
INTRODUCTION
Single-phase boost power factor corrector (PFC) rectifier
(Fig. 1) rated at about 100-200W and above are usually
designed to operate at constant frequency in continuous
conduction mode (CCM) at full load. Issues in digital control
of boost PFC rectifiers have been addressed in numerous
publications (e.g. [1-6]), including digital average current
mode control and predictive current control algorithms for
low-harmonic current shaping in CCM. At intermediate loads,
the boost PFC operates in discontinuous conduction mode
iac
L (0.5 mH)
ig
+
vac
+
vL
vg
_
Q
avL
_
Ton
sDCM
iL,sense
Current
Sensing
Corrector
iC
Vo R
(220mF)
++
DTon
Current
Controller
ei
_
+
ADC
Vo_d
u
iref
PREDICTIVE CURRENT CONTROL
A. CCM Predictive Current Control
Predictive current control techniques for CCM operation,
such as the methods described in [4, 7], enable effective, highperformance current control and relatively simple digital
implementation. In order to reduce the current analog-todigital (A/D) sampling rate requirements, inductor current can
be sampled once per switching period. Assuming CCM
operation, if the current sample is taken in the middle of the
transistor conduction interval or in the middle of the diode
conduction interval, it approximately represents the average
inductor current over the entire switching period. Based on the
geometry of the inductor current waveform, a predictive
current control law can be constructed to minimize the error
between the current reference iL,ref and the current sample
iL,sense,
_
Vo
Feed
Forward
II.
+
C
Driver
g
DPWM
Ton,ff
DCM
comparator
D (CSD04060)
+
iL
ADC
_
iD
vds
(STP25NM60N)
_
+
iQ
vg
ADC
vg_d
vg_d
Voltage ev _ Vref_d
+
Controller
Digital Controller
CCM/DCM modification
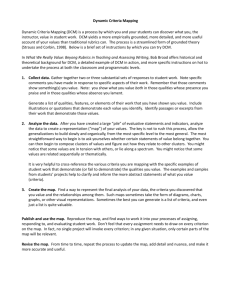
Fig.1 Experimental digitally controlled 300 W boost PFC. Modifications
related to the proposed CCM/DCM predictive current control methods
include an auxiliary inductor winding, a DCM comparator, and current
sensing corrector function in the digital controller. Comparator signal (sDCM)
feeds into the DCM current sensing corrector, and into DPWM for adaptive
switching approaches.
Ton [ n + 1] =
vg
L
(i L,ref - i L ,sense ) + (1 - )Ts
Vo
Vo
where Ton is the transistor on-time in the next switching
period, Ts = 1/fs is the switching period, vg is the input voltage,
and Vo is the output voltage. A block diagram of the controller
This work has been sponsored through the Colorado Power Electronics Center
(CoPEC).
1
978-1-422-2812-0/09/$25.00 ©2009 IEEE
(1)
760
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
capable of implementing the predictive current control law is
shown in Fig. 1. Note that the CCM predictive current control
law (1) includes a proportional term DTon based on the current
error, and a feed-forward term Ton,ff based on the input-tooutput voltage ratio vg/Vo. As shown in Fig. 1, the current
reference iref in the boost PFC is obtained by multiplication of
the sampled input voltage vg_d, and the power control signal u
at the output of the output voltage-loop controller.
iL,sense
_
+
) Ts
CCM
vg
2L
u (1 - ) Ts
Ts
Vo
(7)
DCM
ei
b
a
z -1
+
++
DTon
++
Ton
sDCM
DPWM
III.
iref.Ts
z -1
CONTROL TECHNIQUES FOR IMPROVED EFFICIENCY
AND REDUCED DISTORTION
A. Adaptive Switching CCM/DCM Current Control
When a constant-frequency boost PFC rectifier operates in
DCM, ringing can be observed at the time when both
transistor Q and diode D are turned-off, as illustrated by the
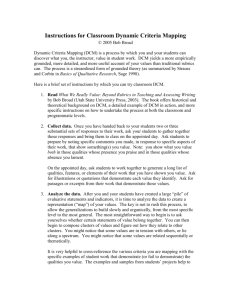
experimental waveforms of the inductor current iL, transistor
control signal g and transistor drain voltage vds shown in
Fig. 4. The ringing is due to the resonance between the boost
inductor and the total parasitic capacitance at the switching
node. The oscillation period and amplitude are dependent on
the inductance and capacitance values as well as the operating
point. At the time when the transistor is turned on, the values
of the drain voltage and the inductor current can vary
significantly. The resulting average inductor current is a
Tdcm
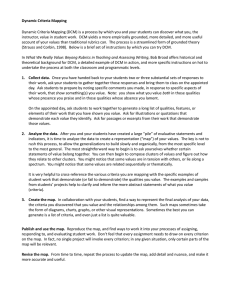
Fig.2 Waveforms illustrating operation of the DCM comparator
In order to simplify the calculation of the current sensing
correction factor ( ), and to facilitate the adaptive switching
technique described in Section III, an auxiliary inductor
winding and a voltage comparator (“DCM comparator” in
Fig. 1) are used to detect zero crossings of the inductor voltage
(vL) in the CCM/DCM current controller proposed in this
paper. The DCM comparator output signal (sDCM) is shown in
Fig. 2 together with the inductor current waveform in DCM.
This signal can be used to detect DCM/CCM boundary, and to
measure the discontinuous conduction interval (Tdcm) using the
system clock and a counter. Based on Tdcm, the correction
factor can be calculated simply as
(3)
The complete CCM/DCM predictive current control law,
including a proportional/integral (PI) feedback action and the
DCM correction is give in (4)-(7),
T [ n + 1] = DT [n] + T
on
on
on, ff
Fig.4 Experimental boost converter waveforms in DCM
(4)
2
978-1-422-2812-0/09/$25.00 ©2009 IEEE
g
Ton,ff
Predicitve Current Compensator
Fig.3 Block diagram of the CCM/DCM predictive current controller
(Ts-Tdcm)
Comparator Signal sDCM
Tdcm
)
Ts
vg
Vo
A block diagram of the CCM/DCM predictive current
controller is shown in Fig. 3.
<iL>Ts
k = (1 -
(6)
Input emulated resistance (Re) is equal to (1/u).
is the gain of the
predictive controller; is related to the location of the zero in the PI
compensator. Ts is the switching period.
which has been shown to reduce the current distortion at light
load and in CCM/DCM mode transitions [7].
Ton
ei [ n] = Ts iref - (Ts - Tdcm ) iL , sense
Ton, ff =
The CCM predictive current control (1) is very effective
when the boost converter operates in CCM [4, 7]. However,
under intermediate or light load conditions, when the boost
converter operates in DCM, the current sensed in the middle
of the transistor or the diode conduction is no longer
representing the average inductor current. In addition, the
CCM current control dynamics are different from that in
DCM. This results in more current distortion in DCM.
A current correction approach has been proposed in [7] to
extend the predictive current control law to DCM operation. A
current correction factor ( ) is introduced to correct for the
difference between the sensed current (iL,sense) and the average
current (<iL>Ts),
2L
Vo
k=
(
)
(2)
ReTs Vo - v g
Inductor Current iL
(5)
(1 -
B. CCM/DCM Predictive Current Control
iL,sense
DTon[n] = a ei [n] + b ei [n - 1] + DTon [n - 1]
761
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
highly nonlinear function of the transistor duty ratio. In DCM
operation of the boost PFC rectifier using standard current
control algorithms optimized for CCM operation, this
oscillation results in a significant current distortion. This
problem has been identified in [6], and a solution was
proposed based on damping the oscillation using a dissipative
snubber. The input current distortion is significantly reduced,
but at the expense of slightly increased losses and reduced
efficiency in both CCM and DCM operation.
iL,sense[n-1]
Ts
Tsw
Tdcm
Drain Voltage vds
Tosc
iL,sense[n]
Inductor Current iL
Tosc
2
vg
Gate Signal
g
Comparator Signal
sDCM
Fig.6 Experimental boost converter waveforms in DCM
using adaptive switching approach (fs = 80kHz)
Fig.5 Waveforms illustrating adaptive switching control technique
B. Adaptive Frequency CCM/DCM Current Control
In order to further increase the light-load efficiency, one
approach is to reduce the switching frequency in order to
reduce switching losses. In the adaptive frequency CCM/DCM
current controller proposed in this paper, only the DCM
switching frequency is adjusted, while keeping approximately
constant CCM switching frequency, fsmax = 1/Ts,min. The DCM
switching frequency variation described here is based on
keeping the transistor duty cycle constant in DCM. For a
particular load (120 W) in the PFC rectifier of Fig. 1, Fig. 7
shows variations of the transistor duty ratio and the switching
period over one half line period. When the converter operates
at constant frequency in CCM, the switch duty ratio is
approximately independent of load. In DCM, a lower duty
An adaptive switching control technique is proposed here
to address the above mentioned problem while simultaneously
reducing the switching losses. The method is based on
extending the transistor turn-off time until the drain voltage
(vds) rings to a minimum, as illustrated by the waveforms of
Fig. 5. Similar ideas of approaching zero-voltage switching
based on DCM ringing have been previously applied to
flyback DC-DC converters [14, 15]. The approach described
here is based on the assumption that the DCM oscillation
period Tosc does not change much between two consecutive
switching periods. The digital controller uses the DCM
comparator signal sDCM to measure and store the oscillation
period Tosc. After expiration of the nominal (CCM) switching
period Ts, the controller waits for a low-to-high transition of
sDCM, and extends the off time by Tosc/2 so that the next DCM
oscillation cycle ends at the point when the inductor current is
zero and the drain voltage is at a minimum (as shown in
Fig. 5). As a result of the adaptive switching period
adjustment, switching losses are reduced, and the inductor
current is very close to zero each time the transistor is turned
on, thus reducing input current distortion in DCM.
The adaptive switching control law is the same as the
CCM/DCM control law (4)-(7), except that (6) is replaced by
ei [ n] = Tsw iref - (Tsw - Tdcm ) i L , sense
(8)
Tsw is the actual switching period.
where the current error is computed based on the actual
adaptively adjusted switching period (Tsw) as opposed to the
fixed CCM switching period Ts. Fig. 6 shows an example of
experimental waveforms demonstrating operation of the
adaptive switching CCM/DCM predictive current controller
over several switching periods.
Fig.7 Switching period and duty ratio over line period using adaptive
frequency approach (fsmax =80kHz)
3
978-1-422-2812-0/09/$25.00 ©2009 IEEE
762
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
ratio is required as the load is reduced, assuming constant
switching frequency. The proposed adaptive frequency
controller keeps the same duty ratio during DCM operation by
allowing the switching period to vary. The switching period
variation is shown in the bottom part of Fig. 7. Note that the
constant DCM duty ratio approach also enables a smooth
transition between CCM and DCM operation of the controller.
The controller is also taking advantage of the adaptive
switching CCM/DCM control described in Section III.A, in
which the transistor is turned on at the lowest drain voltage.
Depending on the selection of the minimum switching
period Ts,min and the lowest load, the adaptive frequency
CCM/DCM controller may operate under 20kHz, which may
cause audio noise. A limit to the maximum allowed switching
period (Ts,max) is imposed to limit the minimum allowed
switching frequency. The complete set of adaptive frequency
CCM/DCM controller equations is as follows:
Ton [n + 1] = DTon [ n] + Ton , ff
(9)
Ts [n + 1] = max[Ts ,min , Ts , DCM ]
(10)
Ts , DCM = min[Ts ,max , T 2 s ,min (1 -
v g Re
) ]
Vo 2 L
(12)
ei [n] = Tsw iref - (Tsw - Tdcm ) iL ,sense
(13)
vg
Vo
) Ts ,min ,
2 L Ts , max
]
Re Ts , min
period (Tdcm), gives a value slightly shorter compared to the
actual Tdcm. As a result, the CCM/DCM and the adaptive
switching CCM/DCM controller run as CCM controllers
through the entire line period, resulting in the same distortion
of the line current as the standard CCM predictive controller.
Using the adaptive frequency controller, the transistor turn-off
time around zero-crossing increases, which reduces the
(11)
D Ton [n] = a ei [ n] + b ei [n - 1] + DTon [n - 1]
Ton , ff = min[(1 -
Fig.8 Boost PFC experimental setup
(14)
Ts,min is constant switching period selected for CCM operation; Ts,max is the
maximum allowed switching period.
IV.
EXPERIMENTAL RESULTS
A 300W boost PFC rectifier (fs
80 kHz; L = 0.5 mH;
C = 220 H) has been built as shown in Fig. 1, using a field
programmable gate array (FPGA) development platform to
implement the digital controller. Fig. 8 shows the
experimental setup. The operation is tested under four
different controllers, including the standard predictive CCM
current controller (Section II.A), CCM/DCM predictive
current controller (Section II.B), the proposed adaptive
switching CCM/DCM current controller (Section III.A) and
the adaptive frequency CCM/DCM current controller (Section
III.B) over wide load range (15-300 W). At high power, in
CCM operation, all of the controllers operate exactly the same
as the standard predictive controller in CCM, resulting in lowharmonic current waveform, as shown in Fig. 9.
At a reduced load, when DCM occurs only near the zerocrossings of the ac line, the CCM/DCM transition results in
some distortion, as shown in Fig. 10(a). Since the inductor
current around zero crossings is very low, the duty cycle is
nearly 100%. The low inductor current cannot charge the
switching node capacitance up to the output voltage. The
DCM comparator used to detect the discontinuous conduction
Fig.9 Rectifier line voltage (vg) and line current (iac), (80kHz, 300W),
adaptive switching CCM/DCM current control
distortion around zero crossings, as shown in Fig. 10 (b).
At an intermediate load, when DCM occurs during a part of
the line period, lower distortion can be observed in the
waveforms obtained using the proposed CCM/DCM
controller, as shown in Figs. 11(a) and 11(b). The DCM
current correction improves current control and reduces
distortion.
At light loads, when the converter operates in DCM at all
times, input current distortion using the adaptive switching
CCM/DCM controller (Fig. 13(b)) is significantly reduced
compared to the CCM/DCM controller (Fig. 13(a)). The DCM
distortion is reduced by switching at the lowest drain voltage,
4
978-1-422-2812-0/09/$25.00 ©2009 IEEE
763
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
thus reducing nonlinear effects of inductor current ringing on
the current regulation performance. Furthermore, efficiency is
improved as shown in Fig. 12. The remaining distortion in the
adaptive switching CCM/DCM controller is a result of the
switching period discretized by the DCM oscillation period
(Tosc). Hence, some current distortion happens around the
jump between n to n+1 DCM oscillation cycles.
Fig. 12 shows that the adaptive frequency CCM/DCM
current controller improves efficiency further at light loads by
reducing the switching losses. In the experimental circuit, the
maximum (CCM) switching frequency is 80 kHz; while the
minimum switching frequency is 20kHz.
At very light loads, using the adaptive frequency
CCM/DCM controller, the converter operates at the lowest
allowed frequency most of the time, which is why the current
harmonic distortion increases somewhat.
Experimental results for 15W (5% of the rated load) are
(a)
(b)
Fig.11 Rectifier line voltage (vg) and line current (iac), (80kHz, 75W)
(a) CCM predictive current control
(b) CCM/DCM predictive current control
(a)
Line Voltage = 110 Vrm s
96
Efficiency (%)
95
94
93
Adaptive Frequency CCM/DCM Current Control
92
Adaptive Sw itching CCM/DCM Current Control
CCM/DCM Predictive Current Control
91
CCM Predictive Current Control
90
0
50
100
150
200
250
Power (W)
Fig.12 Efficiency comparison (fsmax=80kHz)
(b)
Fig.10 Rectifier line voltage (vg) and line current (iac), (80kHz, 100W)
(a) Adaptive switching CCM/DCM current control
(b) Adaptive frequency CCM/DCM current control
5
978-1-422-2812-0/09/$25.00 ©2009 IEEE
764
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
300
shown in Figs. 14(a)-14(d). Finally, Table I summarizes the
performance of the four considered controllers.
V.
CONCLUSIONS
This paper addresses efficiency improvements and
reductions in input current harmonic distortion in digitally
controlled single-phase boost power factor correction (PFC)
rectifiers operating over wide range of loads. Proposed
predictive current control methods enable low-harmonic
operation in both continuous conduction mode (CCM) and
discontinuous conduction mode (DCM). A DCM detection
circuit is used to facilitate a CCM/DCM predictive current
control law, and adaptive switching at the minimum of the
transistor drain voltage. These techniques result in improved
efficiency and reduced current distortion. Furthermore, an
approach to adaptive switching frequency adjustment is
proposed, leading to further efficiency improvements at light
loads. Experimental results are shown for a 300 W digitally
controlled boost PFC rectifier.
(a)
VI.
[1]
[2]
[3]
[4]
[5]
[6]
(b)
Fig.13 Rectifier line voltage (vg) and line current (iac), (80kHz, 50W)
(a) CCM/DCM predictive current control
(b) Adaptive switching CCM/DCM current control
REFERENCES
W. Zhang, G. Feng, Y. Liu, and B. Wu, ”A Digital Power Factor
Correction (PFC) Control Strategy Optimized for DSP,” in IEEE Trans.
on Power Electron., vol. 19, no. 6, pp. 1474–1485, Nov. 2004.
W. Stefanutti, P. Mattavelli, G. Spiazzi, and P. Tenti, “Digital Control of
Single-Phase Power Factor Preregulators Based on Current and Voltage
Sensing at Switching Terminals,” in IEEE Trans. on Power Electron.,
vol. 21, no. 5, pp. 1356–1363, Sep. 2006.
B. Mather, B. Ramachandran, and D. Maksimovic, “A Digital PFC
Controller without Input Voltage Sensing,” in Proc. IEEE APEC 2007,
pp. 198-204.
J. Chen, A. P. Prodic, R. W. Erickson, and D. Maksimovic, “Predictive
Digital Current Programmed Control,” in IEEE Trans. on Power
Electron., vol. 18, no. 1, pp. 411–419, Jan. 2003.
D. M. Van de Sype, K. De Gusseme, A. P. M. Van den Bossche, and J.
A. Melkebeek, “A Sampleing Algorithem for Digitally Controlled Boost
PFC Converters,” in IEEE Trans. on Power Electron., vol. 19, no. 3, pp.
649–657, May 2004.
K. De Gusseme, D. M. Van de Sype, A. P. M. Van den Bossche, and J.
A. Melkebeek, “Input-Current Distortion of CCM Boost PFC Converters
Operated in DCM,” in IEEE Trans. on Ind. Electron., vol. 54, no. 2, pp.
858–865, Apr. 2007.
TABLE I Performance comparison of experimental CCM predictive current controller, CCM/DCM predictive current control, adaptive switching
CCM/DCM current control, and adaptive frequency CCM/DCM current control.
Output Power
Efficiency
Power Factor
THD
CCM Predictive Current Control
300W
94.9 %
0.999
2.2 %
CCM/DCM Predictive Current Control
300W
94.9 %
0.999
2.2%
Adaptive Switching CCM/DCM Current Control
300W
94.9 %
0.999
2.2 %
Adaptive Frequency CCM/DCM Current Control
300W
94.9 %
0.999
2.2 %
CCM Predictive Current Control
50W
94.7 %
0.985
17.1 %
CCM/DCM Predictive Current Control
50W
94.5 %
0.993
10.9 %
5.8 %
Adaptive Switching CCM/DCM Current Control
50W
95.1 %
0.993
Adaptive Frequency CCM/DCM Current Control
50W
95.1 %
0.995
3.8 %
CCM Predictive Current Control
15W
91.1 %
0.923
33.7 %
CCM/DCM Predictive Current Control
15W
90.9 %
0.946
20.1 %
Adaptive Switching CCM/DCM Current Control
15W
92.5 %
0.943
14.0 %
Adaptive Frequency CCM/DCM Current Control
15W
93.5 %
0.945
12.9 %
6
978-1-422-2812-0/09/$25.00 ©2009 IEEE
765
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
(c)
(a)
(b)
Fig.14 Rectifier line voltage (vg) and line current (iac), (80kHz, 15W)
(a) CCM predictive current control
(b) CCM/DCM predictive current control
(c) Adaptive switching CCM/DCM current control
(d) Adaptive frequency CCM/DCM current control
[7]
K. De Gusseme, D. M. Van de Sype, A. P. M. Van den Bossche, and J.
A. Melkebeek, “Digitally Controlled Boost Power-Factor-Correction
Converters Operating in Both Continuous and Discontinuous
Conduction Mode,” in IEEE Trans. on Ind. Electron., vol. 52, no. 1, pp.
88–97, Feb. 2005.
[8] P. Athalye, D. Maksimovic, and R. Erickson, “DSP implementation of a
single-cycle predictive current controller in a boost PFC rectifier,” in
Proc. IEEE APEC 2005, pp. 837-842.
[9] Z. Z. Ye, and M. Jovanovic, “Implementation and Performance
Evaluation of DSP-Based Control for Constant-Frequency
Discontinuous-Conduction-Mode Boost PFC Front End,” in IEEE
Trans. on Ind. Electron., vol. 52, no. 1, pp. 98–107, Feb. 2005.
[10] M. Ferdowsi, and A. Emadi, “Estimative Current Mode Control
Technique for DC-DC Converters Operating in Discontinuous
Conduction Mode,” in IEEE Power Electron. Letters, vol. 2, no. 2, pp.
20–23, Mar. 2004.
[11] S. Buso, S. Fasolo, and P. Mattavelli, “Uninterruptible Power Supply
Multiloop Control Employing Digital Predictive Voltage and Current
Regulators,” in IEEE Trans. Ind. Applicat., vol. 37, no. 6, pp. 1846–
1854, Nov./Dec. 2001.
(d)
[12] M. Ilic, and D. Maksimovic, “Digital Average Current-Mode Controller
for DC-DC Converters in Physical Vapor Deposition Application ,” in
Proc. IEEE PESC 2006, pp. 1-7.
[13] H. Peng, and D. Maksimovic, “Digital Current-Mode Controller for DCDC Converters,” in Proc. IEEE APEC 2005, pp. 899-842.
[14] P. Preller, U.S. Patent 6 229 716, 2001. [Voltage Apparatus Having a
Switching Element Receiving Driving Pulses Having a Duration and a
Starting Time That are Depended upon a Load.]
[15] M. Feldtkeller, U.S. Patent 7 012 819, 2006. [Method for Operating a
Switching Converter and Drive Circuit for Driving a Switch in a
Switching Converter.]
7
978-1-422-2812-0/09/$25.00 ©2009 IEEE
766
Authorized licensed use limited to: UNIVERSITY OF COLORADO. Downloaded on September 1, 2009 at 16:26 from IEEE Xplore. Restrictions apply.
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users