Induction Motors – Part I (V3)
")
EE/CME 392 Laboratory
Induction Motors – Part I
(V3)
71
Safety
1.
The voltages used in this experiment are lethal. Assemble or modify a circuit only with the breakers off. Do not apply power to a circuit until an instructor has checked the wiring. Do not touch any node or component of a live circuit. Be careful when moving near a circuit so that a wire is not accidentally snagged.
2.
The machines used in this experiment are physically dangerous. Guards must be in place over any rotating components before applying power. Do not wear loose clothing or neckties, and keep long hair away from the machines
3.
If an emergency occurs, the power for the entire laboratory can be disabled using the red button on the power distribution panel.
4.
Before starting the induction motor, make sure that the autotransformer and the starter box are cranked to position 0.
5.
In the experiment, currents in various parts of the circuit may be very large; therefore, use high current capacity leads.
6.
Use ammeters and wattmeter’s with proper current ratings.
7.
Ground all machines and the starter box by connecting them to the panel ground
Objective
:
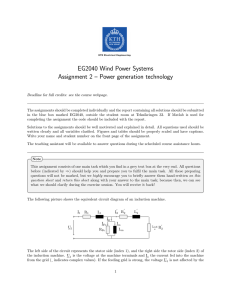
To study a 3-phase induction motor, by using its experimentally developed equivalent circuit diagram and by obtaining its basic characteristics: torque/slip, current/slip and efficiency /slip characteristics.
Equipment: Induction machines on table numbers (1 and 6) have to be connected as a Y on the stator side whereas the machines on table numbers (3 and 4) have to be connected as a ∆ .
.
Introduction - Equivalent Circuit Diagram and Losses
The induction motor working in the steady state ( by a single-phase equivalent circuit shown in Fig. 1.
R
1
X
1
I
1 a
I
2
X
2
I
3
and s
R
2
) can be represented
V
1 R c
X m
E
2
R
2
(1-s)/s b
Stator Rotor
Fig. 1 Per-phase equivalent circuit of a 3-phase induction motor
Revised Mar. 13, 2012
EE/CME 392 Laboratory 72
As can be seen the power balance of the motor shown in Fig. 2 can be derived directly from this equivalent circuit. Hence, the efficiency of the motor can be written as: where, is the power on the shaft, and are copper losses in the stator and rotor respectively, is the core loss, and is the mechanical (friction) loss.
P o
P gap
P m
P in
!
P cu1
!
P c
!
P cu2
!
P m
Stator Rotor
Fig. 2 Power balance of induction motor
Since the only directly measurable electrical values of the induction motors are , evaluation of must be done indirectly, basing on the fact that is proportional to and that is negligible when . The latter fact occurs during running light load (no-load) test. That test however, cannot be performed with a voltage less than certain value . Thus, to extract values of at a required voltage (say, ) from
, a graphical construction, based on the function , is needed as shown in Fig. 3.
Fig. 3 Connection for finding losses Δ P m
and Δ P c
EE/CME 392 Laboratory 73
Introduction - Characteristics of Induction Motor
Slip is an important parameter that characterizes a point of operation of the induction motor.
Hence, characteristics of the machine are usually given as functions of slip. The most interesting of these characteristics are:
‐ Torque/slip characteristics ;
‐ Current/slip characteristics
‐ Efficiency/slip characteristics
;
;
Only a limited part of the characteristics can be obtained experimentally because in load test the slip varies within small interval for loads from no-load to reasonably high values (say 120% of its rated capacity). Thus, the full characteristics can be obtained only from the equivalent circuit shown in Fig. 1. The induced torque of an induction motor is given by:
For a constant , knowing one can determine the induced torque of the induction motor.
Referring to the equivalent circuit shown in Fig. 1, the per-phase air-gap power is the power absorbed by the resistance . Therefore the total (3-phase) air-gap power is given by:
Accordingly, if can be determined, then the air-gap power and the induced torque are known.
The easiest way to find is to determine the Thevenin’s equivalent of the portion of the circuit to the left of terminals a-b. Using the Thevenin’s theorem, we get:
This leads to the following expressions for the rotor current and the induced torque: where .
EE/CME 392 Laboratory 74
Based on the equivalent circuit, it can be shown that the torque for a constant (V/f) ratio with
is
Equation above shows the frequency dependence of torque-speed characteristics of an induction motor.
-------------------------------------------------------------------------------------------------------------------
Procedure : For all the following tests, the induction motor is connected to the starter box as shown in Fig. 4 (Leave the rotor side open-circuited for finding the turns ratio).
1.
Effective Turns Ratio (Stator to Rotor) – With the rotor side open-circuited, apply rated voltage to the stator terminals. Measure the stator and rotor side voltages .
2.
No-load Test
1.
Decouple the induction motor and the DC machine.
2.
Connect the rotor windings to the external rotor resistances.
3.
Apply a variable three-phase voltage using an auto-transformer to the induction motor stator terminals.
4.
Record input power, line current, voltage and rotor speed (measure using a tachometer) for a voltage range of about 30 % to 100% of the rated value. Take about 3 to 4 readings in this range. As the voltage is reduced to about 30%, do not allow the machine to stall.
Notes:
1.
In the two wattmeter method, if one of the wattmeters shows a negative deflection, switch-off and flip its current coil connection. That wattmeter reading is treated as negative and subtracted from the positive wattmeter reading.
2.
The induction motor starter box inserts additional resistance in the rotor circuit in order to limit the rotor current at starting. The knob has to be at position 0 (i.e. maximum resistance inserted in the rotor circuit) to start the machine. Once the motor picks up speed the additional resistance in the rotor circuit can be brought back to a zero value by moving the knob to position 10.
3.
The voltage across rotor terminals is very close to zero at steady state during the noload test.
EE/CME 392 Laboratory 75
3-phase supply
L
2
L
1
L
3
R
3
R
2
R
1
T
2
T
1
T
3
Starter box
100 % 0
A
100 % 0
100 %
Auto -transformer
0
W
1
W
2 R
1
C
1
V
A
1
Stator windings
V
B
1
A
2
B
2
C
2
R
2
Fig. 4 Detailed connection of the induction motor
R
3
Rotor windings
T
1
T
2
T
3
W
1
100 % 0
A
A
1
V
100 %
0
B
1
100 %
0
Auto-transformer
W
2
Fig. 5 No load test connection diagram
C
1
IM
3.
Locked Rotor Test (Short-circuit Test) Caution: Perform this test starting with zero voltage at input, and increasing it gradually.
1.
Retain the connection of the induction motor to the auto-transformer.
2.
Mechanically immobilize the rotor of the machine.
3.
Measure the input power, line current and voltage at the rated (nameplate) rotor current.
Note: Bring back the additional resistance in the rotor circuit (starter box resistance) to zero by moving the knob to position 10 before recording your readings. Otherwise, the rotor resistance calculated will include the additional resistance from the starter box.
4.
Load Test
1.
Retain the no-load connection of the induction machine to a variable three-phase supply and apply a load by connecting the DC machine as a separately excited generator shown in Fig. 6 and Fig. 7 (Refer to the diagram of the DC machine panel).
2.
From the no-load test readings namely input power, line current, voltage and speed, calculate the motor’s torque when it is running under no-load conditions overcoming core
EE/CME 392 Laboratory 76 losses, friction, windage and stray losses. The slip measurement required in this test is described at the bottom of the page. Note: You need a low rating for the ammeter and wattmeter current coils (line current < 5A) to get the values for your measurements in this part of the experiment.
3.
After recording the no-load readings, couple the DC generator to the induction motor as shown in Fig. 6. Starting at no load connected to the generator, record your readings and then start loading the generator gradually up to the full load of either motor or generator, whichever occurs first. Record motor input power, input line current, input voltage, rotor speed and calculate its slip, and torque. Caution: Use the 30A scale for ammeter and wattmeter’s when applying the resistances of the toaster box.
4.
Rotor Resistance Speed Control: It is possible to control the speed of an induction motor by changing its rotor resistance. Repeat the load test on the induction for two other values of rotor resistances (starter box knob positions set at positions 5 and 0). Also remember to record the values of external rotor resistance inserted in the circuit (use a FLUKE 75 meter to get the resistance values).
Note: The output power of the induction motor is calculated from the equivalent circuit and then output torque can be calculated from there knowing the value of speed.
T
1
T
2
T
3
W
1
100 %
100 %
0
0
A
A
1
V
B
1
IM
100 %
Auto -transformer
0
C
1
W
2
Fig. 6 Load test connection diagram
DC separately excited generator
(mechanical load )
DC load bank
A
F
1
A
1
C
12
C
11
A +
DC supply
Field rheostat
Toaster box
V
A
2
F
2
C
21
C
22
Fig. 7 Separately excited DC generator
EE/CME 392 Laboratory 77
Notes on Measuring Slip - When a light load is applied to the induction motor, the speed variation is very small; hence the tachometer used during previous measurements is inadequate to accurately measure the slip. A stroboscope is required to get a more accurate slip during light loading conditions
1.
Adjust the light flashing frequency of the stroboscope such that a stationary image is observed when the induction motor is operating under no-load (DC generator is decoupled). Use a tachometer to measure the value of the no-load speed (say, 1796 rpm) and leave the knob position of the stroboscope at this position.
2.
Couple the DC generator back to the induction motor and measure the slip. If, for example, the shaft speed is 1794 rpm, the tab has ‘slipped’ one revolution in 0.5 minutes. Thus in one minute two tab revolutions are observed. Use a stop watch to measure the time elapsed.
5. Speed Control of Induction Motors Using Armature-Frequency Control - In part 4 of the Load Test, speed control of induction motors was studied by changing its rotor-circuit resistance. The principal disadvantage of this method is low efficiency and poor speed regulation with respect to changes in load. Solid-state inverters with variable voltage and frequency are the preferred methods of choice today. This part of the experiment will use a
Hitachi SJ 300 inverter for speed control.
1.
Rewire the induction machine with a SJ 300 Hitachi inverter connected to its input terminals.
2.
Set the SJ 300 in the auto-tuning mode (parameter determination procedure) using the keypad of the inverter. Read the parameters using the Pro Drive software.
3.
Repeat the load test on the induction motor for three different values of input electrical frequencies with a zero value for rotor external resistance.
Two other values of rotor resistances (starter box knob positions set at positions 5 and 0).
Also remember to record the values of external rotor resistance inserted in the circuit (use a FLUKE 75 meter to get the resistance values).
Note: In order to read the input power supplied to the induction motor (i.e. output of the inverter), remember to connect an external wattmeter to the inverter. The SJ 300 gives power measurements only at its input side.
5. Resistance - Determine the resistances of the stator windings per phase of the induction motor using a FLUKE 75 multimeter or by the dc ammeter-voltmeter method.
Notes:
1.
Perform the stator resistance measurements at the last so that the resistance measurements obtained are those corresponding to the operating temperature of the induction motor.
2.
If you are using a FLUKE meter, remember to subtract the contact resistance of the leads from the readings obtained.
EE/CME 392 Laboratory 78
Reporting Your Results
1.
Per phase stator resistance obtained at normal operating temperature of the induction motor.
2.
Determine the per phase equivalent circuit diagram of the induction motor. For wound rotor induction machines (slip-ring type), the stator and rotor reactances are distributed equally.
3.
Plot torque-slip characteristic for the induction machine at the full rated voltage, the stable part obtained experimentally and the full characteristic obtained from the equivalent circuit diagram. Compare the two characteristics. Calculate the value of starting current and torque as well as maximum torque and the corresponding slip.
4.
Plot the torque-slip characteristics for the induction machine with extra resistances inserted in the rotor circuit at the full rated voltage. Calculate the value of starting current and torque as well as maximum torque and the corresponding slip and compare the results with those obtained in (3).
5.
Plot torque-slip characteristic for the induction machine for the three different frequencies with constant (V/f) ratio. The stable part obtained experimentally and the full characteristic obtained from the equivalent circuit diagram. Calculate the value of starting current and torque as well as maximum torque and the corresponding slip. Compare the torque-slip characteristics with the results obtained in (3).
6.
Plot the curves of motor line current and efficiency versus slip.
7.
Sketch the power balance of the induction motor as shown in Fig. 2.
8.
From the equivalent circuit, determine the input current for blocked rotor at the same voltage used in the locked rotor test. Compare with the measured value.
9.
Sketch a phasor diagram corresponding to rated slip and rated applied voltage.
REFERENCES
1.
IEEE Standard 112: Test Procedures for Polyphase Induction Motors and Generators .
New York, IEEE Press 1991.
2.
Fitzerald , A . E, Kingsley, C., Umans, S., Electric Machinery 6 th Ed , New York: McGraw-
Hill, 2003.
3.
Malik, O.P., Walsh, P., Electric Machine Lab Manual, Department of Electrical and
Computer Engineering, University of Calgary, 2003.
4.
Hitachi SJ 300 Series Inverter Instruction Manual, Manual No.: NB613XJ. September
2006. SJ 300 ebook is also available online.