Sensorless Control of Permanent Magnet Synchronous Generators
advertisement

Sensorless Control of Permanent Magnet
Synchronous Generators in Variable-Speed Wind
Turbine Systems
Mohamed Abdelrahem
Christoph Hackl
Zhenbin Zhang, Ralph Kennel
Student Member, IEEE
Member, IEEE
Student Member, Senior Member, IEEE
Institute for Electrical Drive Systems
Munich School of Engineering Research Group
Institute for Electrical Drive Systems
and Power Electronics
“Control of Renewable Energy Systems (CRES)”
and Power Electronics
Technische Universität München (TUM)
Technische Universität München (TUM)
Technische Universität München (TUM)
Munich, Germany
Munich, Germany
Munich, Germany
Email: mohamed.abdelrahem@tum.de
Email: christoph.hackl@tum.de
Email: james.cheung, ralph.kennel@tum.de
Abstract—This paper proposes a sensorless control strategy for
permanent magnet synchronous generators (PMSGs) in variablespeed wind turbine systems (WTSs). The proposed scheme uses
an extended Kalman filter (EKF) for estimation of rotor speed
and position. For EKF design, the nonlinear state space model of
the PMSG is derived. Estimation and control performance of the
proposed sensorless control method are illustrated by simulation
results for all operation conditions. Moreover, the performance
of the proposed EKF is tested under variations of the PMSG
parameters.
N OTATION
N, R, C are the sets of natural, real and complex numbers.
x ∈ R or x ∈ C is a real or complex scalar. x ∈ Rn (bold)
is a real√valued vector with n ∈ N. x> is the transpose and
kxk = x> x is the Euclidean norm of x. 0n = (0, . . . , 0)>
is the n-th dimensional zero vector. X ∈ Rn×m (capital bold)
is a real valued matrix with n ∈ N rows and m ∈ N columns.
O ∈ Rn×m is the zero matrix. xyz ∈ R2 is a space vector of a
stator (s) or filter (f ) quantity, i.e. z ∈ {s, f }. The space vector
is expressed in either phase abc-, stationary s-, or arbitrarily
rotating k-coordinate system, i.e. y ∈ {abc, s, k}, and may
represent voltage u, flux linkage ψ or current i, i.e. x ∈
{u, ψ, i}. E{x} or E{X} is the expectation value of x or
X, respectively.
certain ride through capability [3]. Operation above and below
the synchronous speed is feasible. However, this situation
has changed in the recent years with the development of
WECSs with larger power capacity, lower cost/kW, increased
power density, and the need for higher reliability. More and
more attention has been paid to direct-drive gearless WECS
concepts. Among different types of generators, the permanent
magnet synchronous generator (PMSG), see Fig 2, has been
found to be superior owing to their advantages of higher
efficiency, higher power density, lower maintenance cost,
and better grid compatibility [1]. Increased reliability and
high performance make direct-drive PMSG-based WECSs
more attractive in multi-Megawatt offshore applications,
where the WECSs are installed in harsh and less-accessible
environments. Currently, there is a variety of commercial
direct-drive PMSG-based WECSs in the market with power
ratings ranging from hundreds of watts to 6 MW [1].
Gear box
Grid
DFIG
I. I NTRODUCTION
The electrical power generation by renewable energy
sources (such as e.g. wind) has increased significantly
during the last years contributing to the reduction of carbon
dioxide emissions and to a lower environmental pollution [1].
This increase will continue as countries are extending their
renewable action plans. Therefore, the share of wind power
generation will increase further worldwide. Among various
wind energy conversion system (WECS) configurations, the
doubly-fed induction generator (DFIG)-based variable-speed
WECSs have been the dominant technology in the market
since late 1990s [1]-[3], see Fig 1. DFIGs can supply
active and reactive power, operate with a partial-scale power
converter (around 30% of the machine rating), and achieve a
Wind
Turbine
Back-back converter
filter
Figure 1: DFIG topology for variable-speed wind turbine
systems.
Vector control has – so far – proven to be the most popular
control technique for PMSGs in variable-speed WTSs [4]. This
method allows for a decoupled control of active and reactive
power of WTSs via regulating the direct and quadrature
components of the stator current vector independently. Vector
control requires accurate knowledge of rotor speed and rotor
position [4]. Recently, the interest in sensorless methods (see,
Wind
Turbine
Back-back converter filter Grid
PMSG
Figure 2: PMSG topology for variable-speed wind turbine
systems.
e.g., [5] and references therein) is increasing due to cost effectiveness/robustness, which implies that the vector controllers
must operate without the information of mechanical sensors
(such as position encoders or speed transducers) mounted on
the shaft. The required rotor signals must be estimated via the
information provided by electrical (e.g. current) sensors which
are cheap and easier to install than mechanical sensors. Furthermore, mechanical sensors reduce the system reliability due
to their high failure rate, which implies shorter maintenance
intervals and, so, higher costs [4]-[7].
Many position sensorless control schemes have been
developed for permanent magnet synchronous machines
(PMSMs) used in applications such as electric vehicles, home
appliances, and industrial drives [5]. Although little work has
been reported on position sensorless vector control for PMSGbased WECSs, the methods developed for other industrial
sensorless PMSM drives can be adapted to PMSG-based
WECS applications. Position sensorless vector control for
PMSGs used in direct-drive WECSs could be easier than those
in other industrial applications because of several factors.
First, the difference between the d- and q-axis inductances
of the PMSGs used in direct-drive WECSs is usually small
(Ld ≈ Lq ). Sensorless control of a nonsalient-pole PMSG is
much easier than that of a PMSM with large saliency in the
medium- and high-speed range. Second, the operation speed
of PMSGs used in WECSs are relatively limited and rarely
reach the flux-weakening region.
Generally the rotor speed/position estimation schemes
applicable for PMSGs can be grouped into two categories: 1)
open-loop calculation (such as flux-based method, inductance
based method, etc...) and 2) closed loop observers (such
as model reference adaptive system (MRAS), sliding mode
observer (SMO), etc..) [5]. The extended Kalman filter
(EKF) is an optimal estimator in the least-square sense for
estimating the states of dynamic nonlinear systems [8]. EKF
has already been used for sensorless control and estimation
of the electrical parameters of AC machines [8]-[15].
In [13], an EKF was designed in the stationary reference
frame s = (α, β) for PMSG speed and position estimation.
However, this paper neglected the mechanical system
dynamics as the author assumes dω
dt = 0. A sensorless control
of distributed power generators based on derivative free
Kalman filter has been proposed in [14]. For the proposed
method, the generator model is first subject to a linearization
based on differential flatness and next state estimation is
performed by applying the standard Kalman filter recursion
to the linearized model. In [15], an EKF was designed in
the rotating reference frame k = (d, q) for PMSG speed
and position estimation. However, this paper neglected the
mechanical system dynamics as the author also assumes
dω
dt = 0. Neglecting the mechanical system dynamics worsens
the estimation performance of the EKF (see results in [15])
and will not represent the real physical model of the system.
The observability of the linearized PMSG model is not
checked in all previous works [12]-[15].
In this paper, an extended Kalman filter is proposed for the
estimation of speed and position of the PMSG rotor. State,
input and measurement variables are used in the rotating
reference frame k = (d, q), which reduces the complexity
of the state, input and measurement matrices and, hence, the
computational time for real-time implementation. The EKF
performance and its robustness against parameter variations
are illustrated via simulation results. The results highlight the
ability of the EKF in tracking the PMSG rotor speed and
position.
II. M ODELING AND C ONTROL OF THE WTS WITH PMSG
The block diagram of the vector control problem of WTS
with PMSG is shown in Fig. 3. It consists of a permanent
magnet synchronous machine mechanically coupled to the
wind turbine directly via a stiff shaft. The stator windings
of the PMSG are connected via a back-to-back full-scale
voltage source converter (VSC), a filter and a transformer to
the grid. The transformer will be neglected in the upcoming
modeling. The machine side converter (MSC) and the grid side
converter (GSC) share a common DC-link with capacitance
Cdc [As/V] with DC-link voltage udc [V]. Detailed models of
these components can be found in [16]. The stator voltage
equation of the PMSG is given by [16]:
d
usabc (t) = Rs isabc (t) + ψsabc (t), ψsabc (0) = 03
(1)
dt
where
d abc
d
ψ (t) = Ls isabc (t) + eabc
(2)
s (t)
dt s
dt
Here usabc = (usa , usb , usc )> [V], isabc = (isa , isb , isc )> [A],
ψsabc = (ψsa , ψsb , ψsc )> [Vs], and eabc
= (eas , ebs , ecs )> [V] are
s
the stator voltages, currents, fluxes, and back electromotive
forces respectively, all in the abc-reference frame (three-phase
system). Rs [Ω] and Ls [Vs/A] are the stator resistance and
inductance.
Note that the PMSG rotor rotates with mechanical angular
frequency ωm [rad/s]. Hence, for a machine with pole pair
number np [1], the electrical angular frequency of the rotor is
given by
ωr = np ωm
Wind turbine
Encoder
r & r
PMSG
r Ls isq
d
s,ref
isabc
i
r
udc,ref
udc
e abc/dq
C
r (L i
d
s s
eL f i
i df ,ref
i df uoabc
PI
uod
e abc/dq
i
u oq
q
f
i qf ,ref
MSC
pm
)
DC
Link
q
f
Cdc
udc
Drive
PLL
PI
PWM
i abc
f
PI
isq,ref
dq/abc
u
abc
o
i
PI
q
s
r
Drive
r ,ref
abc/dq
PI
PWM
r
isd
dq/abc
isabc
usabc
GSC
i abc
f
Rf
PI
e L f i df
e
uoabc
Lf
Grid
Figure 3: PMSG control structure for variable-speed wind turbine systems.
and the rotor reference frame is shifted by the rotor angle
Z t
φr (t) =
ωr (τ )dτ + φ0r , φ0r ∈ R
(3)
0
with respect to the stator reference frame (φ0r is the initial
rotor angle). Equation (1) can be expressed in the stationary
reference frame as follows
xk = TP (φ)−1 xs = TP (φ)−1
TC xabc
| {z }
xs =(xα ,xβ )>
by using the Clarke and Park transformation (see, e.g., [16]),
respectively, given by (neglecting the zero sequence)
1
1 −
−√12
cos(φ) sin(φ) s
abc
k
√2
xs = γ
x
&
x
=
x
3
− sin(φ) cos(φ)
0
− 23
2
|
{z
}
|
{z
}
=:TC
=:TP (φ)−1
(4)
wherepγ = 23 for an amplitude-invariant transformation (or
γ = 2/3 for a power-invariant transformation). Therefore,
(1) can be rewritten in the stationary reference frame s =
(α, β) as follows
uss (t) = Rs iss (t) +
d s
ψ (t),
dt s
ψss (0) = 02
(5)
Equation (5) can be written in the rotating reference frame
k = (d, q) as
usk (t) = Rs isk (t) +
d k
ψ (t) + ωr J ψsk (t),
dt s
ψsk (0) = 02 (6)
where [16]
J := TP (π/2) =
0
1
−1
.
0
Assuming Lds = Lqs =: Ls (no anisotropy), the PMSG flux
can be expressed by
d
d ψpm
ψs
is
k
ψs =
= Ls q +
(7)
0
ψsq
is
and the dynamics of the mechanicals of the (stiff) wind turbine
system are given by
d
1
0
ωm =
me − mm , ωm (0) = ωm
∈R
(8)
dt
Θ
control is a non-trivial task due to the possible non-minimumphase behavior for a power flow from the grid to the DClink [16], [17], [18]. More details on controller design, phaselocked loop or, alternatively, virtual flux estimation and pulsewidth modulation (PWM) are given in, e.g., [4], [19], [16].
where
3
pt
np ψpm isq and mm =
(9)
2
ωm
are the electro-magnetic machine torque (moment) and the
mechanical wind turbine torque, respectively. The mechanical torque mm depends on the wind turbine power pt [W]
(see Sec. III) and the mechanical angular speed ωm [rad/s].
Θ [kg/m2 ] is the rotor inertia and np [1] is the pole pair
number.
me =
A. Overall nonlinear model of the PMSG
d
x = g(x, u), x(0) = x0 ∈ R4 and y = h(x), (10)
dt
is required. Therefore, introduce the state vector x, the output
(measurement) vector y and the input vector u as follows
>
x = isd isq ωr φr ∈ R4 ,
>
(11)
y = isd isq ∈ R2 ,
q >
d
2
∈R .
u = us us
d k
Inserting (7) into (6), solving for dt
is and inserting (9) into (8)
d
and solving for dt ωr yields the nonlinear model (17) with
−Rs d
1 d
q
Ls is + ωr is + Ls us
−Rs iq − ωr id − ωr ψpm + 1 uq
s
Ls s Ls
Ls s
g(x, u) =
(12)
np 3
q
n
ψ
i
−
m
]
p
pm
m
s
Θ 2
ωr
1
h(x) =
0
0
1
0
0
0
x.
0
Wind turbines convert wind energy into mechanical energy
and, via a generator, into electrical energy. The mechanical
(turbine) power of a WTS is given by [20], [16], [21]:
1
3
pt = cp (λ, β) ρπrt2 vw
2
| {z }
(14)
wind power
For the design of the EKF, the derivation of a compact
(nonlinear) state space model of the PMSG of the form
and
III. M AXIMUM POWER POINT TRACKING (MPPT)
(13)
Note that it is assumed that the mechanical torque mm as
in (9) is known (at least roughly using the wind power as
in (14) and the power coefficient as in (16)).
B. Overall control system of the WTS
The complete control block diagram of the PMSG in field
oriented control is depicted in Fig. 3. For the machine-side
converter (MSC), the q-axis current is used to control
the PMSG stator active power in order to harvest the
maximally available wind power (i.e., maximum power
point tracking, see Sec. III), whereas the d-axis current is
used to control the reactive power flow in the PMSG [4], [20].
For the grid-side converter (GSC), the stator voltage orientation is used [4], [16], which allows for independent control of
active (d-axis current) and reactive power (q-axis current) flow
between grid and GSC. The main control objective of the GSC
is to assure an (almost) constant DC-link voltage regardless of
magnitude and direction of the power flow. DC-link voltage
where ρ > 0 [kg/m3 ] is the air density, rt > 0 [m] is the
radius of the wind turbine rotor (πrt2 is the area swept by the
turbine), cp ≥ 0 [1] is the power coefficient, and vw ≥ 0 [m/s]
is the wind speed. The power coefficient cp is a measure for
the “efficiency” of the WTS. It is a nonlinear function of the
tip speed ratio
ωm rt
λ=
≥0
[1]
(15)
vw
and the pitch angle β ≥ 0 [◦ ] of the rotor blades. The Betz limit
cp,Betz = 16/27 ≈ 0.59 is an upper (theoretical) limit of the
power coefficient, i.e. cp (λ, β) ≤ cp,Betz for all (λ, β) ∈ R×R.
For typical WTS, the power coefficient ranges from 0.4 to 0.48
[20], [21]. Many different (data-fitted) approximations for cp
have been reported in the literature. This paper uses the power
coefficient from [21], i.e.
−21
116
cp (λ, β) = 0.5176
− 0.4β − 5 e λi + 0.0068λ
λi
1
0.035
1
− 3
.
(16)
:=
λi
λ + 0.08β
β +1
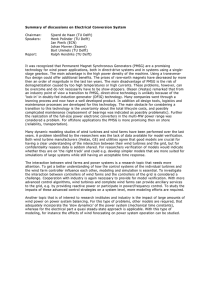
For wind speeds below the nominal wind speed of the WTS,
maximum power tracking is the desired control objective.
Here, the pitch angle is held constant at β = 0 and the
WTS must operate at its optimal tip speed ratio λ? (a given
constant) where the power coefficient has its maximum value
c?p := cp (λ? , 0) = maxλ cp (λ, 0) as shown in Fig. 4. Only
then, the WTS can extract the maximally available turbine
3
power p?t := c?p 21 ρπrt2 vw
[16].
Maximum power point tracking is achieved by a speed
controller, Fig. 3, which assures that the generator angular
frequency ωm is adjusted to the actual wind speed vw such that
ωm rt !
?
vw = λ holds. Therefore, the optimum generator angular
frequency ωm,ref can be calculated and then it is compared
with the actual mechanical speed ωm , which is estimated
by the EKF, as shown in Fig. 3. Based on the difference
ωm,ref − ωm the underlying PI controller generates the q-axis
q
stator reference current is,ref
.
Algorithm 1: Extended Kalman filter
c
Step I: Initialization for k = 0:
x̂[0] = E{x0 },
P 0 := P [0] = E{(x0 − x̂[0])(x0 − x̂[0])> },
−1
K 0 := K[0] = P [0]C[0]> C[0]P [0]C[0]> + R
where, for k ≥ 0,
C[k] := ∂h(x)
∂x −
*
p
*
x̂ [k]
Figure 4: Typical power coefficient curve for β = 0.
IV. E XTENDED K ALMAN F ILTER AND O BSERVABILITY
A. Extended Kalman Filter (EKF)
The EKF is a nonlinear extension of the Kalman filter for
linear systems and is designed based on a discrete nonlinear
system model [22]. For discretization the (simple) forward
Euler method with sampling time Ts [s] is applied to the timecontinuous model (10) with (11), (12) and (13). For sufficiently
small Ts 1, the following holds x[k] := x(kTs ) ≈ x(t)
d
x(t) = x[k+1]−x[k]
for all t ∈ [kTs , (k + 1)Ts ) and
and dt
Ts
k ∈ N∪{0}. Hence, the nonlinear discrete model of the PMSG
can be written as
=:f (x[k],u[k])
z
}|
{
x[k + 1] = x[k] + Ts g(x[k], u[k]) +w[k],
(17)
y[k] = h(x[k]) + v[k],
x[0] = x0
where the random variables w[k] := (w1 [k], . . . , w4 [k])> ∈
R4 and v[k] := (v1 [k], v2 [k])> ∈ R2 are included to model
system uncertainties and measurement noise, respectively.
Both are assumed to be independent (i.e., E{w[k]v[j]> } =
O 4×2 for all k, j ∈ N) and white noise (i.e., E{w[k]} = 04
and E{v[k]} = 02 for all k ∈ N) with
normal probability
2
i })
distribution (i.e., p(αi ) = σ 1√2π exp −(αi −E{α
with
2σ 2
αi
α
σα2 i := E{(αi − E{αi })2 } and αi ∈ {wi , vi }). For simplicity,
it is assumed that the covariance matrices are constant, i.e.,
for all k ∈ N:
Q := E{w[k]w[k]> } ≥ 0 and R := E{v[k]v[k]> } > 0.
(18)
Note that Q and R must be chosen positive semi-definite and
positive definite, respectively.
Since system uncertainties and measurement noise are not
known a priori, the EKF is implemented as follows
x̂[k + 1] = f (x̂[k], u[k]) − K[k] y[k] − ŷ[k] ,
(19)
ŷ[k] = h(x̂[k]) = C x̂[k].
where K[k] is the Kalman gain (to be specified below) and x̂
and ŷ are the estimated state and output vector, respectively.
The recursive algorithm of the EKF implementation is listed
in Algorithm 1 [22]. The EKF achieves an optimal state
estimation by minimizing the covariance of the estimation
error for each time instant k ≥ 1.
Step II: Time update (“a priori prediction”) for k ≥ 1:
(a) State prediction
x̂− [k] = f (x̂[k − 1], u[k − 1])
(b) Error covariance matrix prediction
P − [k] = A[k]P [k − 1]A[k]> + Q
where
(x,u) A[k] := ∂f ∂x
−
x̂ [k]
Step III: Verification of (local)
observability k ≥ 1:
no [k] := rank S o [k] with S o [k] as in (21)
Step IV: Computation of Kalman gain for k ≥ 1 −1
K[k] = P − [k]C[k]> C[k]P − [k]C[k]> + R
Step V: Measurement update (“correction”) for k ≥ 1:
(a) Estimation update with measurement
x̂[k] = x̂− [k] + K[k](y[k] − h(x̂− [k]))
(b) Error covariance matrix update
P [k] = P − [k] − K[k]C[k]P − [k]
Step V: Go back to Step II (use C[k]).
A crucial step during the design of the EKF is the choice
of the matrices P 0 , Q and R, which affect the performance
and the convergence of the EKF. The initial error covariance
matrix P 0 represents the covariances (or mean-squared errors)
based on the initial conditions (often P 0 is chosen to be a
diagonal matrix) and determines the initial amplitude of the
transient behavior of the estimation process, while duration
of the transient behavior and steady state performance are
not affected. The matrix Q describes the confidence with the
system model. Large values in Q indicate a low confidence
with the system model, i.e. large parameter uncertainties are
to be expected, and will likewise increase the Kalman gain to
give a better/faster measurement update. However, too large
elements of Q may be lead to oscillations or even instability
of the state estimation. On the other hand, low values in
Q indicate a high confidence in the system model and may
therefore lead to weak (slow) measurement corrections.
The matrix R is related to the measurement noise characteristics. Increasing the values of R indicates that the measured
signals are heavily affected by noise and, therefore, are of
little confidence. Consequently, the Kalman gain will decrease
yielding a poorer (slower) transient response.
In [23] general guide lines are given how to select the values
of Q and R. Following these guide lines, for this paper the
r [rad/ s]
4
2
0
r [rad ]
0
0.2
8
6
4
2
0
0.4
time (sec)
0.6
0.8
r
0.1
0.2
0.3
time (sec)
0.4
ˆ
r
0.5
Figure 5: Estimation performance of the proposed EKF (from
top): wind speed vw , rotor speed ωr , Observability matrix
rank, and rotor angle φr .
following values have been selected
Q =
diag{0.5, 0.5, 1 · 10−6 , 5 · 10−3 }
R
=
diag{1, 1}
P0
=
diag{1, 1, 0.001, 10}
x0
=
(5, 0.1, 0, 0)>
r
100
0
8
6
4
2
0
̂r
r
0
0.1
0.2
time (sec)
0.3
ˆr
0.4
Figure 6: Estimation performance of the proposed EKF at 50%
step change in the PMSG resistance Rs (from top): wind speed
vw , PMSG stator resistance Rs , rotor speed ωr , and rotor angle
φr .
V. S IMULATION R ESULTS AND D ISCUSSION
(20)
B. Observability
The observability of a linear system can be verified by
computing the observability matrix and its rank. For nonlinear
systems, it is possible to analyze the observability “locally”
by analyzing the linearized model around an operating point
[24]. The observability matrix of the linearized model of the
considered PMSG as in (17) is given by
C[k]
C[k]A[k]
8×4
S o [k] :=
(21)
C[k]A[k]2 ∈ R ,
C[k]A[k]3
where A[k] and C[k] are computed numerically1 for each
sampling instant k ≥ 0 (see Algorithm 1). The pair
{A[k], C[k]} (i.e., the linearized model of the PMSG) is
locally observable if and only if
the observability matrix S o [k]
has full rank, i.e., rank S o [k] = 4 for the considered PMSG
as in (17). To check “local” observability, the rank of the
observability matrix S o [k] is computed numerically for each
sampling instant k ≥ 0 in Step III of Algorithm 1.
1 Future
25
20
15
10
5
0
0.4
0.3
0.2
0.1
0
400
300
200
r [rad]
vw[m/ s]
vw[m/ s]
̂r
Rs [ ]
r
100
0
rank [1]
r [rad / s]
25
20
15
10
5
0
400
300
200
work will derive analytical conditions for local observability.
A simulation model of a 16 kW WTS with PMSG is
implemented in Matlab/Simulink. The system parameters
are listed in Table I. The implementation is as in Fig. 3.
For more details on the implementation of e.g. back-to-back
converter, PWM, current controller design, see [16]. The
simulation results are shown in Figs. 5-9. The estimation
performances of EKF are compared with the actual values for
different wind speed and parameter uncertainties in Rs and Ls .
Fig. 5 shows the simulation results for variable wind
speeds. The presented wind speeds cover almost the complete
speed range of the PMSG-based WTS (from low to high
speed). Fig. 5 illustrates the tracking capability of the EKF
of rotor speed and rotor position at low and high speeds. The
EKF shows a high estimation accuracy as the estimation error
is very small, see Table. II. The observability of the linearized
PMSG model has been tested online under variable wind
speeds, see Fig. 5: The linearized system is observable even
if the PMSG operates at low speed, i.e., the stator frequency
is almost zero (as shown in Fig. 5). The observability
matrix
has full rank for all times, i.e. rank S o [k] = 4 for all k ≥ 0.
In order to check the robustness of the EKF under
(unknown) parameter variations of the PMSG, the value
of the stator resistance Rs is increased by 50% (e.g. due
to warming or aging). For this scenario, Fig. 6 shows the
estimation performances of the proposed EKF. The simulated
wind speed profile is depicted in Fig. 6 (top). It is clear that
vw[m/ s]
m [rpm]
12
8
400
300
200
m,ref
m
i sq, ref i sq i sd, ref i sd
r
100
0
̂r
[1 ]
8.2
8.1
8.0
r
ˆr
0.49
c p [1]
8
6
4
2
0
0.48
0.47
0
0.1
0.2
time (sec)
0.3
0.4
Figure 7: Estimation performance of the proposed EKF at 25%
step change in the PMSG inductance Ls (from top): wind
speed vw , PMSG inductance Ls , rotor speed ωr , and rotor
angle φr .
Table I: Parameters of the PMSG-based WTS.
Name
Wind turbine rated power
Wind turbine radius
Rated wind speed
Optimal tip speed ration
PMSG rated power
PMSG rated voltage (line-line]
Number of pair poles
Stator resistance
Stator inductance
Permanent magnet flux
PMSG moment of inertia
DC capacitor
DC-link voltage
Grid line-line voltage
Grid normal frequency
Grid resistance
Grid inductance
Filter resistance
Filter inductance
Sampling time
Simulation step
Nomenclature
pt
rt
vwrated
λ?
pnom
urms
s
np
Rs
Ls
ψpm
Θ
Cdc
udc
uo
fe
Rg
Lg
Rf
Lf
Ts
Tsim
Value
16 kW
1.6 m
20 m/sec
8.11
16 kW
400 V
3
0.2[Ω]
15 mH
0.85
0.02[kg/m2 ]
3[mF]
700[V]
400[V]
50[Hz]
0.036[Ω]
2[mH]
0.12[Ω]
8[mH]
40[µs]
1[µs]
Table II: Estimation errors of the proposed EKF.
Simulation case
Normal conditions
Rs increased by 50%
Ls increased by 25%
ωr
0.9%
1.15%
1.8%
φr
1.2%
1.4%
2.6%
P[kW ] & Q
r [rad/ s]
16
r [rad]
25
20
15
10
5
0
1200
900
600
300
0
80
60
40
20
0
isd & isq [ A]
25
20
15
10
5
0
20
Ls [mH]
vw[m/ s]
the EKF is robust against parameter uncertainties in Rs .
It estimates rotor speed and rotor position with very small
errors (see Tab. II).
P Pmax Q
20
15
10
5
0
0.2
0.4
0.6
0.8
time [sec]
1.0
1.2
1.4
Figure 8: Performance of the MSC control system (from top):
wind speed vw , rotor mechanical speed ωm , d & q currents ids
& iqs , tip speed ratio λ, power coefficient cp , and output active
and reactive power P & Q.
Finally, the robustness with respect to changes (due
to magnetic saturation) in the stator inductance Ls is
investigated. Therefore, Ls is increased by 25%. Fig. 7 shows
the simulation results of the proposed EKF for this scenario.
The used wind speed profile is depicted in Fig. 7 (top).
Again, the EKF shows an accurate estimation performance
and robustness against parameter uncertainties (see Tab. II).
The final simulation results are shown in Fig. 8 and Fig. 9.
Fig. 8 illustrates the control performance of the machine side
converter under variable wind speed (top). It is clear that
the MSC guarantees tracking of the maximum power from
the wind turbine. The actual rotor speed ŵm of the PMSG
is following the reference value wm,ref , which ensures the
MPPT capability. The power coefficient cp (λ, 0) is kept close
to its maximal (optimal) value c?p ≈ 0.48 when the optimal
tip speed ratio λ? ≈ 8.11 is reached. Moreover, the generated
power from the PMSG is almost equal the maximum power
as shown in Fig. 8 (bottom). Also, the GSC control system
ensures practical tracking of the constant reference DC
udc udc,ref
700
i df & i qf [ A]
u dc [V ]
725
675
50
40
30
20
10
0
q
i df i df ,ref i f i qf ,ref
0.2
0.4
0.6
0.8
time [sec]
1.0
1.2
1.4
Figure 9: Performance of the GSC control system (from top):
DC-link voltage udc , and d & q currents idf & iqf .
voltage (with some small deviations) and of the references d
& q currents as shown in Fig. 9.
VI. C ONCLUSION
This paper proposed a sensorless vector control method for
variable-speed wind turbine systems (WTSs) with permanent
magnet synchronous generator (PMSG). The method uses an
extended Kalman filter (EKF) for estimating the PMSG rotor
speed and position. For the design of the EKF, a nonlinear
state space model of the PMSG has been derived. The design
procedure of the EKF has been presented in detail. The
sensorless control scheme of the WTS with PMSG has been
illustrated by simulation results and its performance has been
compared with the real values of the rotor speed and position.
The results have shown that the EKF tracks rotor speed and
position with high accuracy. Moreover, the EKF is robust to
variations in the PMSG stator resistance and inductance.
R EFERENCES
[1] M. Liserre, R. Cardenas, M. Molinas, and J. Rodriguez, “Overview
of Multi-MW Wind Turbines and Wind Parks”, IEEE Transactions on
Industrial Electronics, Vol. 58, No. 4, pp. 1081–1095, April 2011.
[2] A. Hansen, F. Iov, F. Blaabjerg, and L. Hansen, “Review of contemporary
wind turbine concepts and their market penetration”, Journal of Wind
Engergy, Vol. 58, No. 4, pp. 1081–1095, Apr. 2011.
[3] R. Cardenas, R. Pena, S. Alepuz, and G. Asher, “Overview of Control
Systems for the Operation of DFIGs in Wind Energy Applications”, IEEE
Transactions on Industrial Electronics, Vol. 60, No. 7, pp. 2776-2798,
July 2013.
[4] M. Chinchilla, S. Arnaltes, J.C. Burgos, “Control of permanent magnet
generators applied to variable-speed wind-energy systems connected to
the grid”, IEEE Transactions on Energy Conversion, Vol. 21, No. 1,
pp. 130–135, March 2006.
[5] Y. Zhao, C. Wei, Z. Zhang, W. Qiao, “A Review on Position/Speed
Sensorless Control for Permanent-Magnet Synchronous Machine-Based
Wind Energy Conversion Systems”, IEEE Journal of Emerging and
Selected Topics in Power Electronics, Vol. 1, No. 4, pp. 203–216,
Dec. 2013.
[6] M. Abdel-Salam, A. Ahmed, and M. Abdel-Sater, “Harmonic Mitigation,
Maximum Power Point Tracking and Dynamic Performance of Variable
Speed Grid Connected Wind Turbine”, Journal of Electric Power
Component and Systems, Vol. 39, pp. 176–190, 2011.
[7] M. Abdel-Salam, A. Ahmed, and M. Abdel-Sater, “ Maximum power
point tracking for variable speed grid connected small wind turbine”,
Proceedings of the IEEE International Energy and Exhibition Conference,
pp. 600–605, 18-22 Dec. 2010.
[8] F. Auger, M. Hilairet, J. Guerrero, E. Monmasson, T. Orlowska-Kowalska,
S. Katsura, “Industrial Applications of the Kalman Filter: A Review”,
IEEE Transaction on Industrial Electronics, Vol. 60, No. 12, pp. 5458–
5471, Dec. 2013.
[9] M. Abdelrahem, C. Hackl, and R. Kennel, “Application of Extended
Kalman Filter to Parameter Estimation of Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems”, in Proceedings of
the 5th International Conference on Clean Electrical Power (ICCEP),
Taormina, Italy, 16-18 June 2015, pp. 226–233.
[10] M. Abdelrahem, C. Hackl, and R. Kennel, “Sensorless Control of
Doubly-Fed Induction Generators in Variable-Speed Wind Turbine Systems”, in Proceedings of the 5th International Conference on Clean
Electrical Power (ICCEP), Taormina, Italy, 16-18 June 2015, pp. 406–
413.
[11] Z. Zhang, C. Hackl, F. Wang, Z. Chen, and R. Kennel, “Encoderless model predictive control of back-to-back converter direct-drive
permanent-magnet synchronous generator wind turbine systems”, in
Proceedings of 15th European Conference on Power Electronics and
Applications, 2013, pp. 1–10.
[12] D. Janiszewski, “Extended Kalman Filter Based Speed Sensorless
PMSM Control with Load Reconstruction”, in Proceedings of IEEE
Annual Conference on Industrial Electronics (IECON), 2006, pp. 1465–
1468.
[13] Q. Huang; Z. Pan, “Sensorless control of permanent magnet synchronous
generator in direct-drive wind power system”, International Conference
on Electrical Machines and Systems (ICEMS), pp. 1–5, 20-23 Aug. 2011.
[14] G. Rigatos, P. Siano, N. Zervos, “Sensorless Control of Distributed
Power Generators With the Derivative-Free Nonlinear Kalman Filter”,
IEEE Transactions on Industrial Electronics, Vol. 61, No. 11, pp. 6369–
6382, Nov. 2014.
[15] A. Echchaachouai, S. El Hani, A. Hammouch, S. Guedira, “Extended
Kalman filter used to estimate speed rotation for sensorless MPPT of
wind conversion chain based on a PMSG”, International Conference
on Electrical and Information Technologies (ICEIT), pp. 172-177, 25-27
March 2015.
[16] C. Dirscherl, C. Hackl, and K. Schechner, “Modellierung und Regelung
von modernen Windkraftanlagen: Eine Einführung (available at the
authors upon request)”, Chapter 24 in Elektrische Antriebe – Regelung
von Antriebssystemen, D. Schröder (Ed.), Springer-Verlag, 2015.
[17] C. Dirscherl, C. Hackl, and K. Schechner, Explicit model predictive
control with disturbance observer for grid-connected voltage source
power converters, in Proceedings of IEEE International Conference on
Industrial Technology (ICIT),17-19 March 2015, pp. 999–1006.
[18] C. Dirscherl, C. M. Hackl, and K. Schechner, Pole-placement based
nonlinear state-feedback control of the DC-link voltage in grid-connected
voltage source power converters: A preliminary study, in Proceedings of
the 2015 IEEE Multi-Conference on Systems and Control, 2015, pp. 207–
214,
[19] Z. Zhang, H. Xu, M. Xue, Z. Chen, T. Sun, R. Kennel, and C. Hackl,
“Predictive control with novel virtual flux estimation for back-to-back
power converters”, IEEE Transactions on Industrial Electronics, Vol. 62,
No. 5, May 2015. pp. 2823–2834.
[20] B. Wu, Y. Lang, N. Zargari, and S. Kouro, Power conversion and control
of wind energy systems, Wiley-IEEE Press, 2011.
[21] Siegfried Heier, Grid Integration of Wind Energy Conversion Systems,
John Wiley & Sons Ltd, 1998.
[22] G. Bishop, and G. Welch, An introduction to the Kalman filter, Technical
report TR 95-041, Department of Computer Science, University of North
Carolina at Chapel Hill, 2006.
[23] S. Bolognani, L. Tubiana, and M. Zigliotto, “Extended Kalman filter
tuning in sensorless PMSM drives”, IEEE Transactions on Industry
Applications, Vol. 39, No. 6, pp. 1741-1747, November 2003.
[24] C. De Wit, A. Youssef, J. Barbot, P. Martin, F. Malrait, “Observability
conditions of induction motors at low frequencies”, Proceedings of the
39th IEEE Conference on Decision and Control, Vol. 3, pp. 2044–2049,
2000.